卷盘供水式喷灌机智能喷灌监测系统设计与研究*
2022-10-28 04:26唐嘉利
机械工程与自动化 2022年5期
唐嘉利,党 涛,朱 茵
(内蒙古嘉利节水灌溉有限责任公司,内蒙古 锡林郭勒盟 011200)
0 引言
卷盘供水式喷灌机基于大断面、小压力设计原理,采用水涡轮式动力驱动系统,能够实现小流量下较高的喷灌速度,满足大面积农田节水灌溉的需求。PE(聚乙烯)管中的水流经水涡轮驱动加速后形成高压水流到达喷头处,根据农田浸湿程度调节控制喷头出水量大小,实现农田“按需喷灌,节水灌溉”的作业原则。因此,通过智能喷灌监测系统实时收集农田土壤数据参数,计算农作物需水量,自适应控制喷灌出口流速及作业时间,对利用卷盘供水式喷灌机达到节水和农田增产效果具有重要研究意义和工程实用价值[1]。
1 农田作物需水量计算
农田作物需水量计算是喷灌机智能监测系统设计的核心,是确定农作物灌溉方案与评估用水量的理论依据[2]。在维持土壤持水量60%~80%作业条件下,单位体积(cm3)土壤层内水的质量M水(g)为:
M水=(60%~80%)×P×ρ水.
(1)
其中:P为土壤持水量,内蒙古锡林郭勒盟土壤持水量约为20%;ρ水为水的密度,ρ水=1 g/cm3。
对应的单位体积(cm3)土壤层相对含水量Swc为:
(2)
其中:ρ土为烘干土壤的密度,ρ土=1.4 g/cm3。
由公式(1)和公式(2)计算得到:M水=0.12 g~0.16 g,Swc=8.56%~11.36%。因此可将智能喷灌监测系统的土壤水分监测敏感度设定在8.56%~11.36%区间范围内,以便于喷头流量及流速的自适应控制[3]。
在实际农田灌溉过程中,假定供水管网提供的是恒定水压,根据伯努利方程可知,在恒定水流及喷头出水量一定的条件下,灌溉时间取决于灌溉水量值。文献[4]研究表明,只要通过喷灌监测系统控制开启灌溉阀门时间长短就可以实现精准控制农作物灌溉水量,满足农作物土壤所需水分的平衡要求[5]。一次灌溉持续时间t(min)的计算公式为:
(3)
其中:Kc为农作物之间生长的间隙系数;L为灌溉单位面积所需水量,mm3;S1为喷管间距,mm;S2为喷头间距,mm;Q为喷头流量,mm3/h。
智能喷灌监测系统通过土壤层中的水分传感器采集数据,实时将数据反馈到监测系统,从而准确控制喷灌持续时间。
2 智能喷灌监测系统组成
智能喷灌监测系统采用模块化设计理念,控制系统整体由控制主机(上位机)和数据采集系统(下位机)组成,数据传输通过CAN总线网络实现。智能喷灌监测控制系统原理图如图1所示。
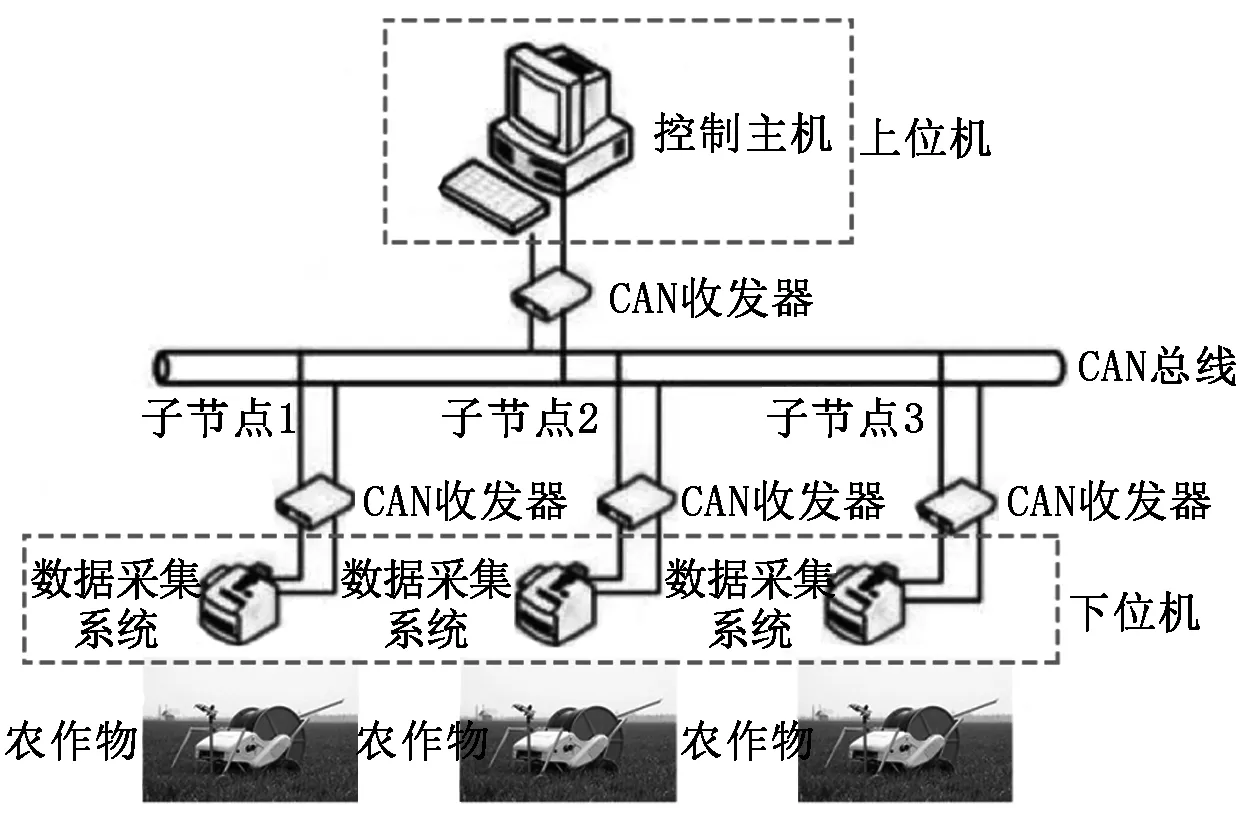
图1 智能喷灌监测控制系统原理图
2.1 监测系统硬件设计
监测系统硬件主要包括上位机硬件和下位机硬件[6]。其中,下位机硬件主要由土壤层水分传感器、微处理单片机STC89C52和实时CAN数据传输控制器组成。土壤层水分传感器用于监测喷灌后土壤层含水量,本文选用电磁脉冲型频域反射传感器,通过检测土壤层表观介电常数来表征土壤层水分含量。微处理系统STC89C52作为下位机智能控制节点的核心,起到连接传感器数据采集模块与实时CAN数据传输的功能,其采用美国STC公司生产的89C52型单片机,它是一款抗干扰能力强、低功耗、高传输速率的微处理系统。实时CAN数据传输控制器采用Philips公司的SJA1000控制器,CAN数据传输遵循标准的CANL和CANH通讯协议,确保土壤层水分传感器采集到的数据能够高效快速无损地传输到上位机主控制系统[7]。下位机硬件系统智能节点数据通讯连接如图2所示。

图2 下位机硬件系统智能节点数据通讯连接
智能喷灌监测系统控制主机作为上位机,其功能是进行数据的分析处理及数据的实时显示。上位机根据喷灌要求适时发送控制指令到下位机,实现喷灌机喷头流量大小及喷灌时间长短的控制。此外,上位机接收土壤水分传感器的实时数据,通过软件算法利用CAN数据传输通道自适应调整喷灌工序及农田作业方案[8]。智能喷灌监测系统总体控制逻辑框图如图3所示。
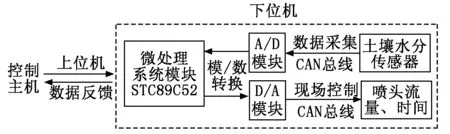
图3 智能喷灌监测系统总体控制逻辑框图
2.2 监测系统软件设计
监测系统软件设计主要包括主控制程序开发、传感器数据采样程序及CAN总线数据传输程序开发等。土壤层水分传感器执行“采样-模数/转换-输出”的循环工作模式,通过I/O数据端口的通讯程序执行上述操作。CAN总线数据传输程序开发是基于CAN报文初始化、接收发送、解码的设计原则。初始化过程中主要执行CAN控制器SJA1000工作模式、传输波特率等设置;接收发送则是执行CAN报文数据帧的设置;解码是读取CAN传输的真实数据的程序编译过程。主控制程序采用串级控制的设计方法,将上位机作为主控制器,下位机作为副控制器,土壤层水分传感器将农田含水量信号实时发送到主、副控制器中,将最终的决策信息由CAN总线传输到喷灌机喷头的执行元件,从而实现农田喷灌作业的闭环反馈控制[9]。
3 智能喷灌监测系统性能测试
利用Visual Studio 2016编译器中的MFC功能,开发了融合数据采集、数据处理、数据通讯、CAN通讯、灌溉控制的智能喷灌监测控制系统的人机交互界面,如图4所示。利用该人机交互界面可以实时监测喷头压力、土壤层水分等数据,并可根据实时数据反馈将灌溉模式切换到自动状态,实现远程控制。
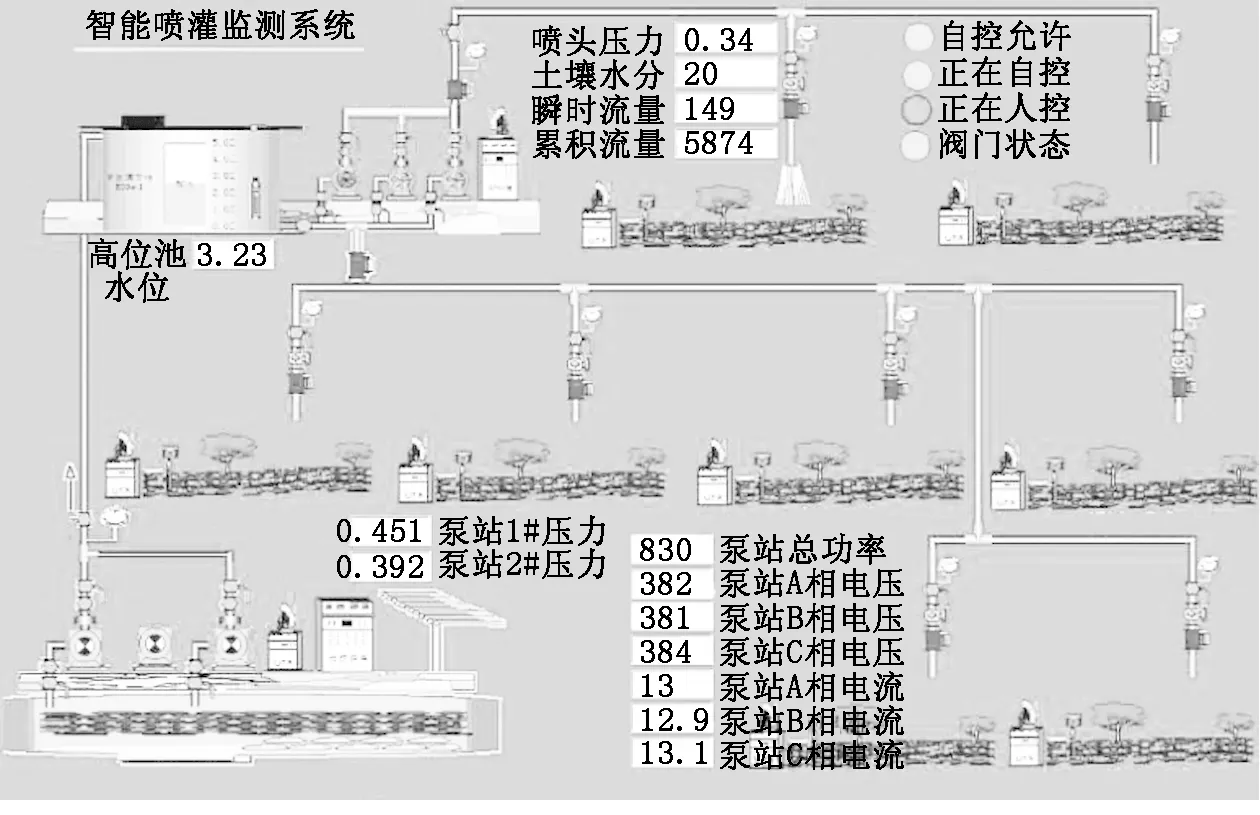
图4 智能灌溉人机交互界面
选用内蒙古锡林郭勒盟苏尼特右旗一块试验用田,通过设置智能监测系统为自动运行状态,即人机界面显示为自控允许、正在自控状态,此时所有喷灌阀门均已打开;系统根据土壤水分传感器采集到的数据自适应调整泵站1#和泵站2#的供水压力,使得某一时刻高位池水位为3.23 m,此时通过人机界面实时数据显示可知,土壤层水分维持到20%附近,已达到智能喷灌监测系统的土壤水分监测敏感度区间范围,表明监测系统总体性能比较稳定。
4 结论
本文利用CAN总线网络搭建了智能喷灌监测系统,通过控制系统模块化设计原则,进行了监测系统硬件系统设计和软件系统开发,最终形成融合控制主机(上位机)和数据采集系统(下位机)的串级控制系统。Visual Studio 2016编译器的MFC开发的智能喷灌人机交互界面可实时数据显示,为卷盘供水式喷灌机市场化推广普及奠定了坚实基础。
猜你喜欢
西北林学院学报(2022年5期)2022-10-04
防护林科技(2022年4期)2022-07-02
小猕猴智力画刊(2022年3期)2022-03-29
小猕猴智力画刊(2022年3期)2022-03-28
今日农业(2021年1期)2021-11-26
环境科学研究(2020年9期)2020-09-25
可再生能源(2020年4期)2020-04-15
科技与创新(2018年1期)2018-12-23
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07