基于ESN的高速公路黄河特大桥团雾预警系统设计
2022-10-27 02:44申全军王孜建樊兆董
计算机测量与控制 2022年10期
申全军,陈 亮,王孜建,张 昱,樊兆董
(1.山东高速集团有限公司创新研究院,济南 250098;2.山东省交通科学研究院,济南 250031;3.山东省路域安全与应急保障交通运输行业重点实验室,济南 250031)
0 引言
团雾是一种常见的天气现象,其区域性强、能见度低、变化快、预测难度大,对于高速公路行车安全极具危害性。团雾不同于大范围的平流雾、辐射雾,其表象为:大气能见度值变化幅度较大、团雾区监测到的能见度呈反复跳跃式的升降。在湖泊密布的地区,空气湿度比较大,当处于昼夜温差大的季节时,白天水分蒸发到空中,晚上气温下降后,空气中的水蒸气就会液化形成团雾。不同方式形成的团雾对交通运行的影响有所不同,导致在团雾预测方面困难重重,对团雾的研究多为利用能见度仪进行监测。
在大跨度桥梁的路段,雾区范围限于桥梁路段;对于湖泊区,山区高速公路的山间低谷地带,这些路段的雾区影响范围介于团雾和地区雾两者之间,有其特殊性。区段雾的浓度有短时动态变化和路段内沿线变化的可能性;这种情况下,区段雾由多个能见度不等的团雾组成,运行环境危险性更大。团雾的全线监测比较困难,特别是对于河流密集地区,实施监测需要布置较多的能见度仪用以监测雾的形成,同时又需要布设较密的动态信息板发布诱导信息。
1 团雾预测现状研究
相关团雾的监测方法多通过能见度、视频等方式进行监测。1940年美国研究者首先使用摄像测量法进行大气能见度监测,J.M.Sanders 开发了一种自动化雾和烟雾探测/告警系统,该系统使用商用雾探测器探测大气能见度,通过与中央计算机系统相互连接的光纤网络传输大气能见度监测数据。袁成松[1]从高速公路能见度数学描述的角度论证了低能见度监测与预报的必要性,阐述了低能见度浓雾、局地性雾和突发性团雾的可预报性。冯海霞[2]提出一种利用多个相邻摄像头采集的视频数据进行判别的雾检测模型。另外,谢静芳[3]提出了另一种思路,在观测范围之外拍摄的包含目标观测范围的视频图像,获取视频图像,并在视频图像中确定出候选图像;根据候选图像的基本参数和预先建立团雾的参数集,确定候选图像是否为团雾图像。郭平[4]设计了一种对团雾多发路段的全范围实时监测方法。根据团雾发生限于一定范围的特点,每公里布设一套团雾信息采集单元,并在相应位置配备可变信息标志牌,根据站点与相邻站点的能见度观测值在可变信息标志牌上发布限速信息。
综上所述,团雾的检测方法与大范围的平流雾、辐射雾是一致的。通过对能见度的监测,加以视频图像识别技术,将图像的对比度、模糊度与正常情况下进行对比识别,判定是否有团雾的产生。
2.高速公路黄河特大桥团雾预警检测系统方案设计
2.1 黄河特大桥团雾预警布设结构
基于黄河特大桥的地理、气象、交通条件,提出一种用于黄河特大桥的团雾预测系统。系统布设框架如图1所示。
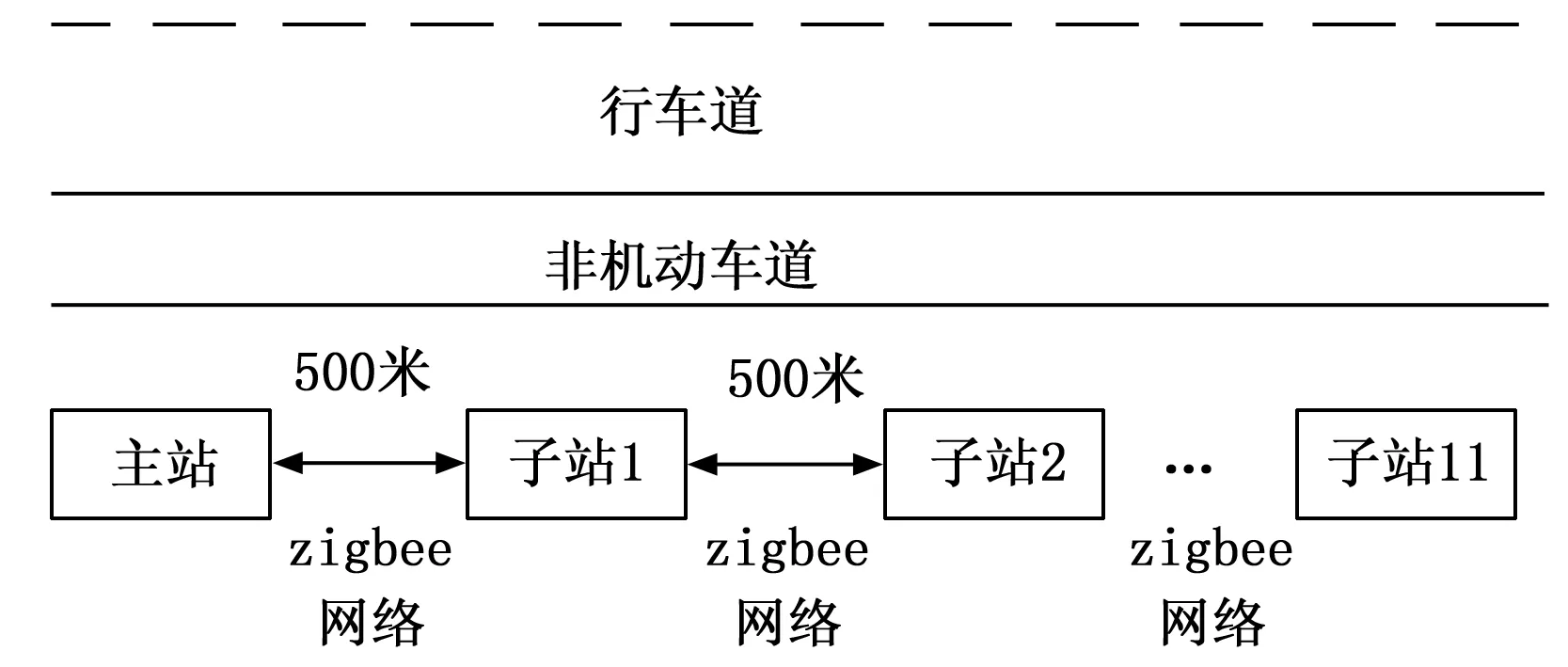
图1 黄河特大桥团雾预测系统布设框架
其中,整个系统采用分布式结构,由一个主站和若干个子站构成。主站和子站之间通过Zigbee网络传输信息,站与站之间相隔500 m。主站主要实现的功能有:1)调度整个系统的资源,包括主站及所有子站;2)控制系统Zigbee网络;3)汇集子站传送的气象、雷达、视觉等信息;4)调用回声状态网络算法,实现团雾预测;5)对外发布团雾预警信息。子站实现的功能主要有:1)接收主站调度信号,利用气象、雷达、视觉设备主动发起探测;2)对传感器接收的数据进行预处理,并通过Zigbee网络向主站发送报文。
2.2 Zigbee传输网络
Zigbee是一种无线网络技术,已经在智慧城市、智能交通、智慧家居等领域崭露头角,它具有中短距离、低功耗、低数据传输速度的特点。Zigbee设备成本低、传输的数据量少,适用于黄河特大桥气象检测的场景。利用Zigbee技术,对黄河特大桥组建无线传输网络,实时检测网络覆盖范围内黄河特大桥的气象条件,对实现团雾预警提供数据支持。
主流的Zigbee网络拓扑结构有3种,分别为网状形(mesh)网、星形(star)网和树形(cluster-tree)网[5]。网络拓扑中的节点可分为两类,全功能设备(FFD)和精简功能设备(RFD)。FDD具有路由功能,RFD不具备路由功能但可定期休眠。星形网是最简单的一种拓扑结构,它由一个协调者节点和若干终端节点组成。优点是星形网的控制和同步都比较简单,缺点是数据链路单一和覆盖范围小。树形网由一个协调者节点、若干个路由节点和若干个终端节点组成,网络拓扑结构比星形网复杂的多。树形网的优点是覆盖范围大、拓扑稳定,缺点是随着覆盖范围的增大和节点数目的增大网络的负载和功耗较大。网状形网由一个协调者节点、若干个路由节点和若干个终端节点组成。网状形网优点是具有更加灵活的信息路由规则,路由节点之间可以直接通讯,还具有自组织、自愈功能,具有较高的冗余性。综合黄河特大桥的物理布设条件,团雾预警系统采用网状形网络拓扑结构。
2.3 回声状态网络预测算法
人工神经网络已经广泛应用于非线性系统的预测,包括支持向量机(SVM)、极限学习机(ELM)和回声状态网络(ESN)等[6-9]。其中,回声状态网络已经成功应用于智能信号处理、高非线性动态系统和动力学建模中。回声状态网络作为递归型神经网络,具有丰富的记忆反馈,主要由输入层、动态储备池和输出层三部分组成。其中,动态储备池即神经网络中的隐藏层,该隐藏层模仿人的神经网络结构,由大量的稀疏连接的神经元组成。
由图2所示,输入层与动态储备池之间存在输入连接权值Win,动态储备池与输出层之间用输出连接权值Wout连接,并且输出层对动态储备池有返回权值Wback,Wback在实际应用过程中通常是可以省略的,因此以虚线连接。图2中,W指动态储备池内部连接权值,x(t)表示输入信号,u(t)表示储备池的状态,fout表示非线性读出,y(t)为ESN的输出。在ESN的网络初始化过程中,输入权值Win,储备池内部权值W以及返回权值Wback随机生成,在网络的动态更新过程中保持不变。将返回权值Wback设置为0,忽略输出层对动态储备池的反馈。因此,对ESN进行训练,就是对输出权值Wout进行训练。ESN的训练过程体现在输出权值Wout调整上,而输出权值Wout训练方法可以采用简单的线性回归,也可以采用诸如SVM之类的机器学习方法,非常灵活。
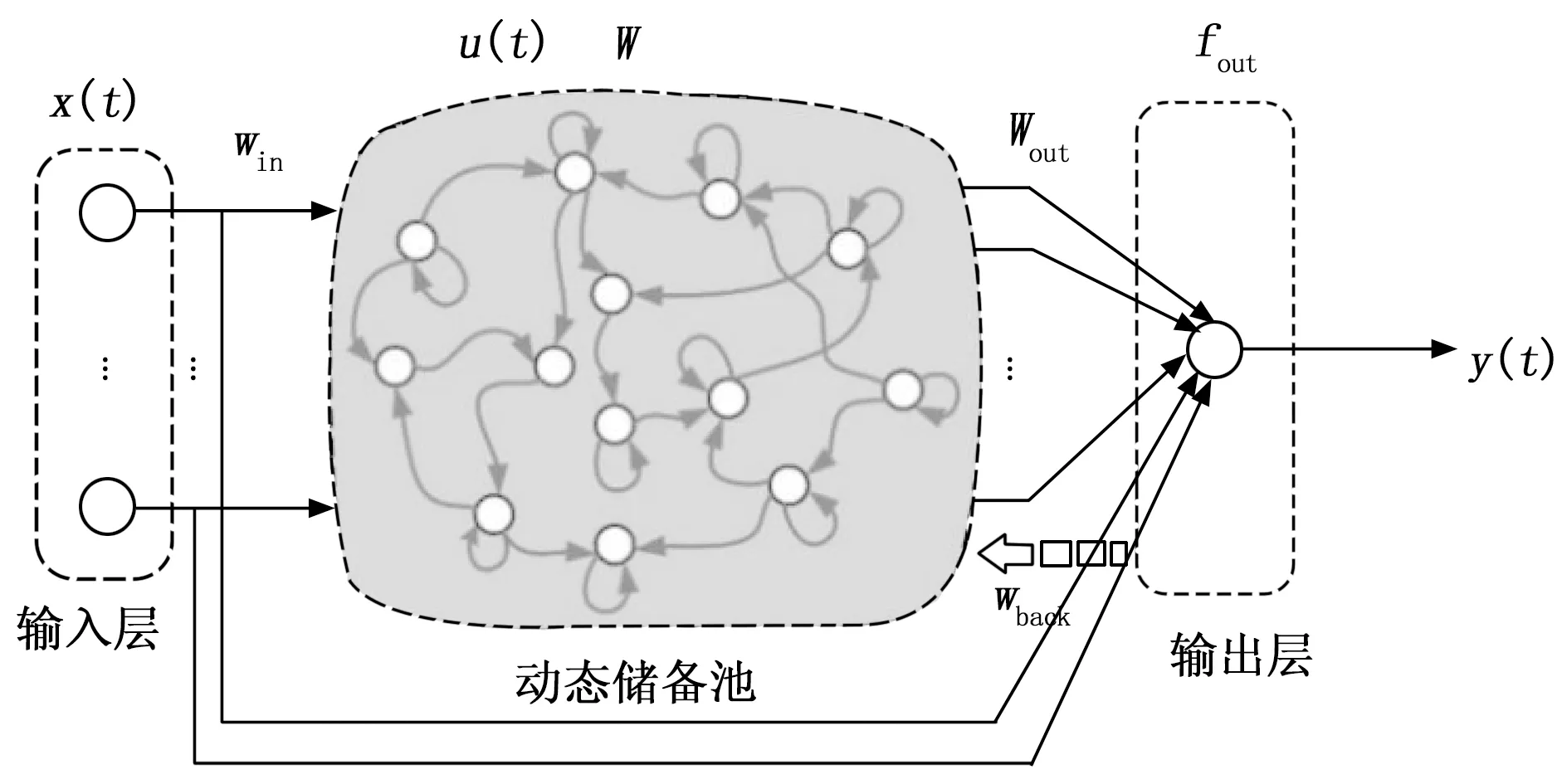
图2 回声状态网络结构
在图2中,t时刻的输入为x(t),一共有L个节点,动态储备池状态为u(t),一共有M个节点,输出为y(t),一共有N个节点。在t时刻,ESN的状态为:
x(t)=[x1(t),x2(t),…,xL(t)]T
u(t)=[u1(t),u2(t),…,uM(t)]T
y(t)=[y1(t),y2(t),…,yN(t)]T
(1)
令输入权值Win初始化为M*L阶,动态储备池内部连接权值W为M*M阶,输出权值Wout为N*M阶,返回权值Wback为M*N阶。那么,动态储备池的更新状态方程为:
u(t+1)=f(Win×x(t+1)+W×u(t)+Wback×y(t))
(2)
y(t)=fout(Woutu(t))
(3)
式(2)中,f(g)表示动态储备池的激活函数,此激活函数通常使用非线性函数,例如tanh函数、sigmoid函数等“S”型函数。式(3)中fout(g)表示输出层的读出函数,此读出函数可以使用线性函数进行线性读出,也可使用非线性函数进行非线性读出。将输出结果y(t)与期望值进行比较,就可以得到误差值。在实际运用过程中,可以使用线性回归的方法对ESN进行网络训练,使误差值最小,此时得到输出权值Wout即可进行实际的工程应用。
3 系统硬件设计
针对黄河特大桥的条件[10-14],预测系统中的硬件设计分为主站硬件设计和子站硬件设计,主站的功能齐全,硬件系统较复杂;子站的硬件系统主要作用是收集测量信息并报告给主站,设计侧重点为低功耗。主站主要用到的硬件单元有边缘计算终端[15]、气象传感器[16]、雷视一体机[17]、雾端路测终端、Zigbee[18]模块、供电模块等,以下对硬件单元进行简要介绍。
3.1 主站硬件系统
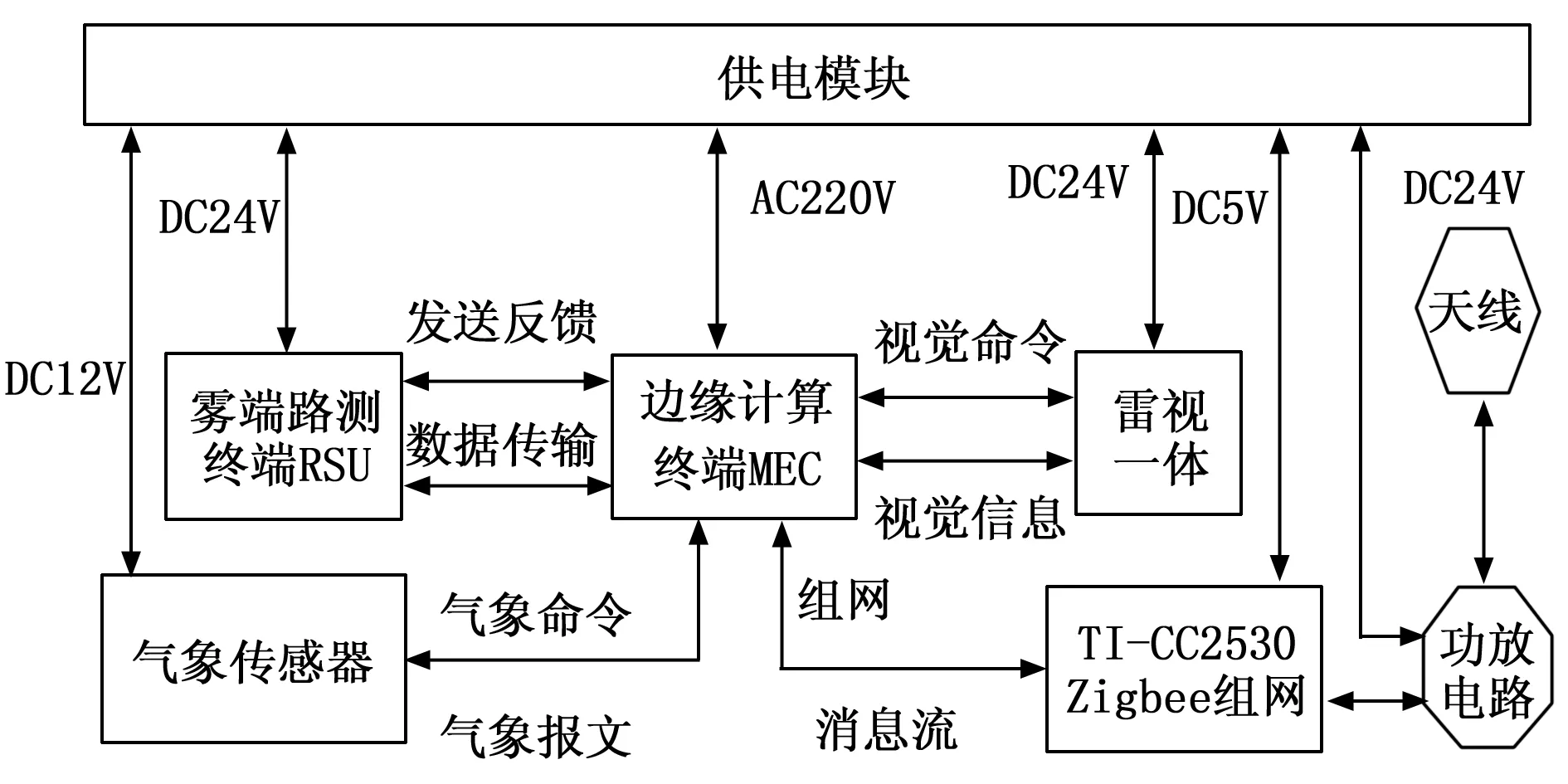
图3 主站硬件系统框图
1)边缘计算终端MEC:边缘计算终端(MEC)为雾端智能处理运算核心,实现对多传感器前端数据融合、存储,可接入视觉相机、微波雷达、气象传感器等多种感知设备的数据,内置事件预测算法,能够运算分析大量实时数据,输出融合感知的结构化数据,可以为道路车辆提供实时数据,满足车路协同对数据毫秒级的实时性要求。
2)气象传感器:气象传感器包括无线道路气象感知子探头和风速风向检测传感器,其中无线道路气象感知子探头型号为XF-MS100,由XF-RRS300TM型无线路面温度检测器和 XF-VIFS110M无线微型能见度检测器组成。其参数如表1所示。

表1 XF-MS100气象感知子探头重要技术参数
3)雾端路测终端:数据传输单元(RSU)可实现GPS亚米级精准定位,基于4G蜂窝移动通信技术将路侧单元的交通量信息、气象信息传输到数据中心服务器,并可通过该网络对前端控制设备进行远程管理。该传输网络用数据专线、光纤网络、5G网络、无线DSRC/C-V2X(RSU)采集车通讯下载等方式解决大数据量的传输,操作人员通过传输网络可对前端控制设备进行设备参数设置和远程设备管理。
4)雷视一体:目前,海康威视、宇视科技、大华股份、天地伟业等企业都推出了自主研发的雷视一体机。项目选择的海康威视一体机在横向和纵向探测范围上都比较大,其中横向探测可视视角可达90°以上,能够覆盖双向6~8车道的监控视角,纵向检测距离可达200 m,甚至450 m以上,采用MIMO体制,距离精度可达±0.32 m,方位角精度可达±0.1°(远距)、±0.3°(近距),速度分辨率为0.1 m/s,可精准检测与区分行人和车辆,并进行全息化还原,实现全局目标的实时矢量化,雷视一体机检测的指标参数包括车流量、时间占有率、平均速度、车头时距、排队长度、车型,可以满足对高速公路运行风险参数的采集要求。
5)TI-CC2530:CC2530是德克萨斯州仪器(TI)公司推出的真正的系统级芯片,适用于针对IEEE 802.15.4协议,Zigbee和RF4CE应用的解决方案。在实际的工程应用中,常用CC2530进行Zigbee组网,因为它能低成本建立强大的网络节点。CC2530结合了领先的RF收发器,业界标准的增强型8051微控制器,系统性能优良,并且具有可编程闪存,8 KB RAM和许多其他强大的功能。CC2530有4种不同闪存版本:CC2530F32/64/128/256,其中分别后缀数字分别表示32/64/128/256 KB的Flash存储器。CC2530具有不同的运行模式,使得它非常适合于超低功耗要求的系统。结合业界领先的金黄色单元状态的Zigbee协议栈(Z-Stack的TM),TI-CC2530F256提供了一个强大和完整的Zigbee解决方案。
3.2 子站硬件系统
子站硬件系统包括STM32F103ZET6,能见度仪、Zigbee模块、供电等,子站硬件系统框架如图4所示。

图4 子站硬件系统框架
3.2.1 STM32F103ZET6
英国ARM公司是全球领先的半导体知识产权(IP)提供商。全世界超过95%的智能手机和平板电脑都采用ARM架构[19]。ARM设计了大量高性价比、耗能低的RISC处理器、相关技术及软件。STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM内核, ARM 目前已经推出了如下CortexM 系列的CPU:M0,M0+,M3和M4。M0是最低端的,其目标就是和8 位/16位单片机进行竞争。M0+是其的一个增强版本。而M3和M4则面向相对高端的单片机市场;简单说就是更强性能的M0。所有这些CPU都是基于ARM Cortex M体系结构。ARMCortexM体系结构相当于定义了一个全集(针对低端MCU市场),而M0~M4这些具体的CPU则是分别实现M体系结构中一个子集;即它们是根据具体需要,实现M体系结构的一部分功能。M4是M3的升级版本,展现出更好的性能,但整体上两者是相同的。两者的差别主要是在继承了M3所有功能的基础上,增加和增强了如下功能:
1)增强了高精度MAC,使得在做算法计算时的性能更高;
2)增加了浮点单元FPU;
3)增加了具有SIMD功能的DSP指令。
简单概括就是比M3增强了做算法运算的功能,使得不仅仅是个MCU,还有点DSP的功能,因此,有的人把它称为DSC(digital signal controller)。鉴于M3和M4有很大相似处,所以很多M3的书籍资料也是适用于M4的。Cortex-M4是一个32位处理器内核。处理器底层的数据路径为32位,底层的寄存器同样为32位,包括存储器接口也是32位。M4的处理器结构使用的是哈佛结构,指令总线和数据总线是相互独立的,所以取址和数据访问可以并行执行。因此,数据访问不会占用指令总线,所以提升了处理器的性能。不仅如此,M4更是提供一个可选的 MPU,随时根据是否需要来决定集成MPU。M4提供的另外一个用于提高性能(主要是存储器访问,比如取址的性能)的部件是cache。
Cache 同样也是可选的,不一定需要。Freescale 的kinetis 的低端系列(K10,K40等)是不集成cache 的,但在高端的K70中就支持了cache。M4 还提供多种调试手段,用于在硬件水平上支持调试操作,如指令断点,数据观察点等,极大的方便了开发。CM4 的浮点单元(FPU)也是可选的,对于集成FPU 的CM4,我们称为CM4F。此外,CM4还集成了一个高性能的中断控制器NVIC(可嵌套向量中断控制器)。
本次研究我们选取采用M4内核架构的STM32F103作为子站的处理中心,在上面实现子站的控制系统,进行少量的算法分析和数据处理,由于STM32F103有非常快的运算速度和非常低廉的价格优势,我们选择它作为子站的大脑。
3.2.2 能见度仪
子站集成维萨拉公司的 VS20 UMB 小型化能见度仪。该传感器工作电压 24 V,功率 3 W,数据更新频率为每分钟一次,VS20 UMB的主要参数如表2所示。
4 软件系统设计
4.1 主站软件设计
主站软件实现对主站硬件设备进行资源调度,以及通过Zigbee网络控制子站的数据传输[21]。主站结合ESN算法利用各子站报送的气象、雷达、视觉信息对是否存在团雾进行判断,继而输出预警信息。其运行流程如图5所示。

图5 主站软件流程图
如图5所示,所有模块上电之后进行初始化操作。边缘计算终端MEC进行计算机环境配置等初始化操作,初始化操作结束后,MEC尝试获取主站数据,主站数据包括气象传感器的数据和雷视一体机的数据。MEC与主站通过硬件连接,因此MEC一定能够获取主站的数据。主站的数据获取之后,MEC发出获取子站数据命令,子站数据主要包括能见度在内的气象数据。如果不能获取子站数据,则利用主站数据和ESN算法对主站位置附近是否存在团雾进行判断;如果主站能够获取子站数据,则利用Zigbee网络,将子站数据传送到主站,主站根据主站已获取的主站数据和子站数据,利用ESN算法对主站和子站附近是否存在团雾分别进行判断。如果判断出有预警信息,则通过RSU终端向云端和服务器公网IP的指定端口发送预警信息。因此,运维人员在云端或服务器上即可查看黄河特大桥某个节点是否存在团雾。
主站软件流程伪代码如下所示:
1)初始化:各传感器设备、MEC
2)while未接收停止指令 do
3)获取主站气象报文
4)获取主站雷视一体报文
5)发送获取子站数据命令
6)监听是否有子站数据返回,若有则进行下一步,若没有则跳转到8)
7)通过Zigbee接收数据、进行数据校验
8)调用ESN算法,输入主站和子站(如果有)的数据,进行团雾判断
9)将团雾是否存在判断结果输出
End while
4.2 子站软件设计
子站的软件系统主要功能是驱动传感器正常工作获取数据,建立Zigbee网络节点,接收主站的命令,将命令中需要的数据以报文的形式通过Zigbee网络传送给主站。子站运行流程如图6所示。
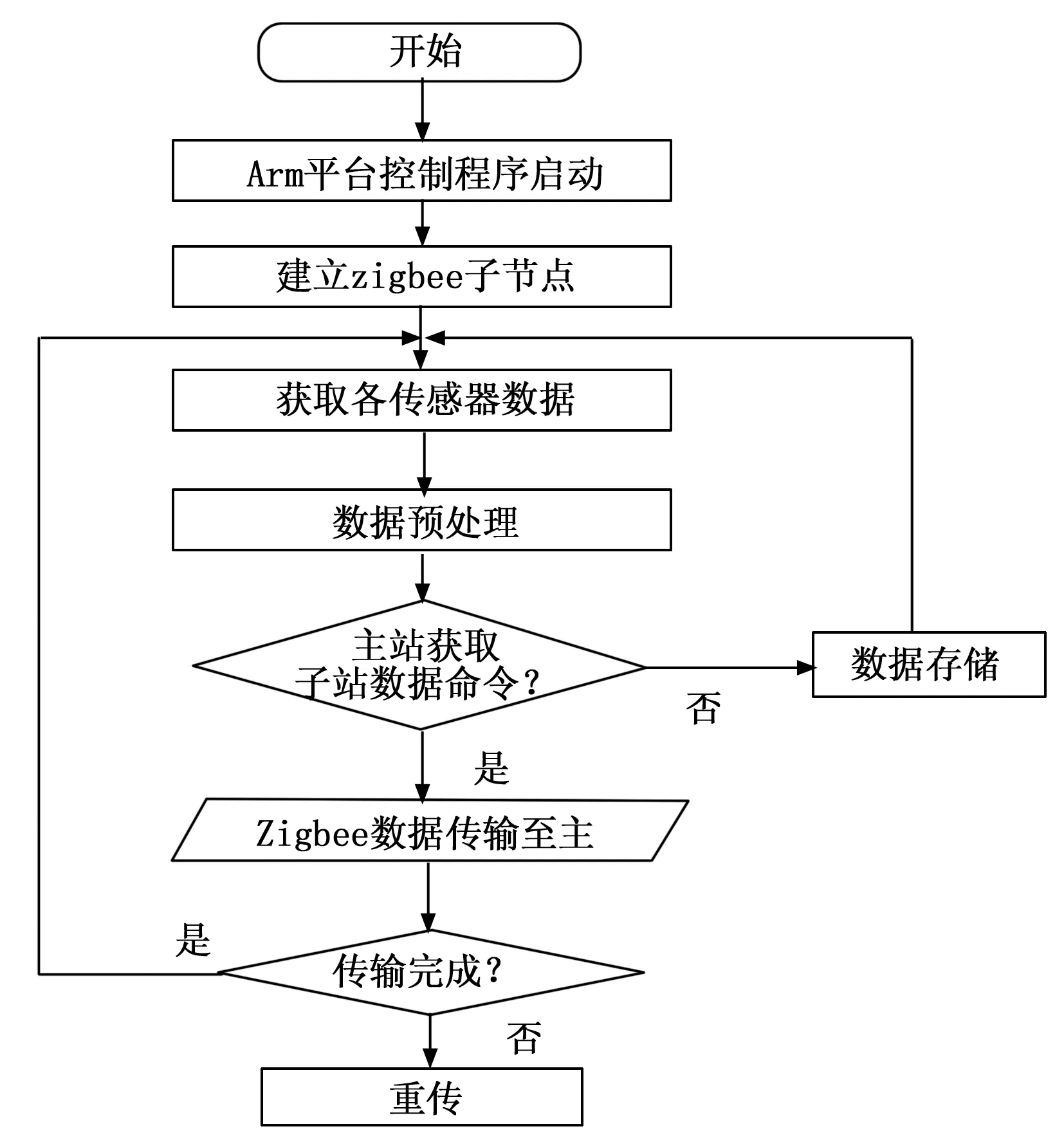
图6 子站软件流程图
如图6所示,子站选用Arm平台作为主控板。上电之后,主控板及各传感器进行初始化,主控板程序启动。主控板向CC2530发送组网命令,CC2530获取组网命令之后进行Zigbee组网,建立Zigbee子节点。主控板向各传感器发送获取数据命令,各传感器以报文的形式将前端数据发送给主控板。主控板收到数据之后进行预处理,包括剔除无效数据、对数据进行初步分类和存储,同时等待主站命令。主站命令到达之后,子站通过Zigbee网络将数据传送至主站;如果子站一直等不到主站命令,则等待超时,等待超时触发存储指令,对子站获取的数据进行存储,然后进行下一轮获取数据的循环过程。在子站向主站发送数据的过程中,如果正确传输了数据,则进行下一轮获取数据的循环过程;如果没有正确传输数据,则进行一次数据重传,不论数据重传是否成功都会进入下一轮获取数据循环过程。
子站软件流程伪代码如下所示:
1)初始化:各传感器设备、Arm平台STM32F103ZET6
2)通知TI-CC2530建立Zigbee网络建立子节点
3)获取各传感器报文
4)数据预处理
5)if主站命令到达
发送子站数据至主站
if 发送成功
返回3)
else
重传
else
数据存储
6)跳转到3)
5 实验结果与分析
将团雾预警系统布设在济南市长清区黄河特大桥上,黄河特大桥全长约3 560 m,设立一个主站,11个子站,主站设在黄河特大桥一端,子站沿黄河特大桥线性顺序设立。团雾预警系统在2022年1月10日观测到团雾形成,并成功进行预警。子站区站号Y6003,提取整理后的气象数据如表3所示。
由表3可见:
1)在凌晨4点时,子站3的能见度在1 km以上,从4:00开始到4:15,能见度下降893 m,从4:15-4:30,能见度下降184 m。从4:30-5:45,能见度始终低于100 m,维持时间大约为75 min。5:45-6:00,能见度从41 m突升到1 125 m,增加幅度1 081 m,此后,能见度一直维持在1 km以上。
2)在4:30-5:45时间段内,风速为0.7~0.8 m/s,风速数据偏大,路表温度小于等于0.3 ℃,空气温度在零下0.4 ℃以下,空气湿度维持在96%~97%之间,降水量为0,路面状态正常。
表4是边缘计算终端利用ESN算法和子站3历史气象数据对团雾出现的概率进行的预测,表中,团雾是否出现,由雷视一体传回的子站3气象图片人工确定。
对比表3和表4,可以发现黄河特大桥在4:15-5:45出现团雾;表4中,4:15-5:45之间,ESN算法利用气象等传感器的历史数据,对团雾出现预测的概率都在80%以上,即预警系统对是否出现团雾进行了准确的预警。
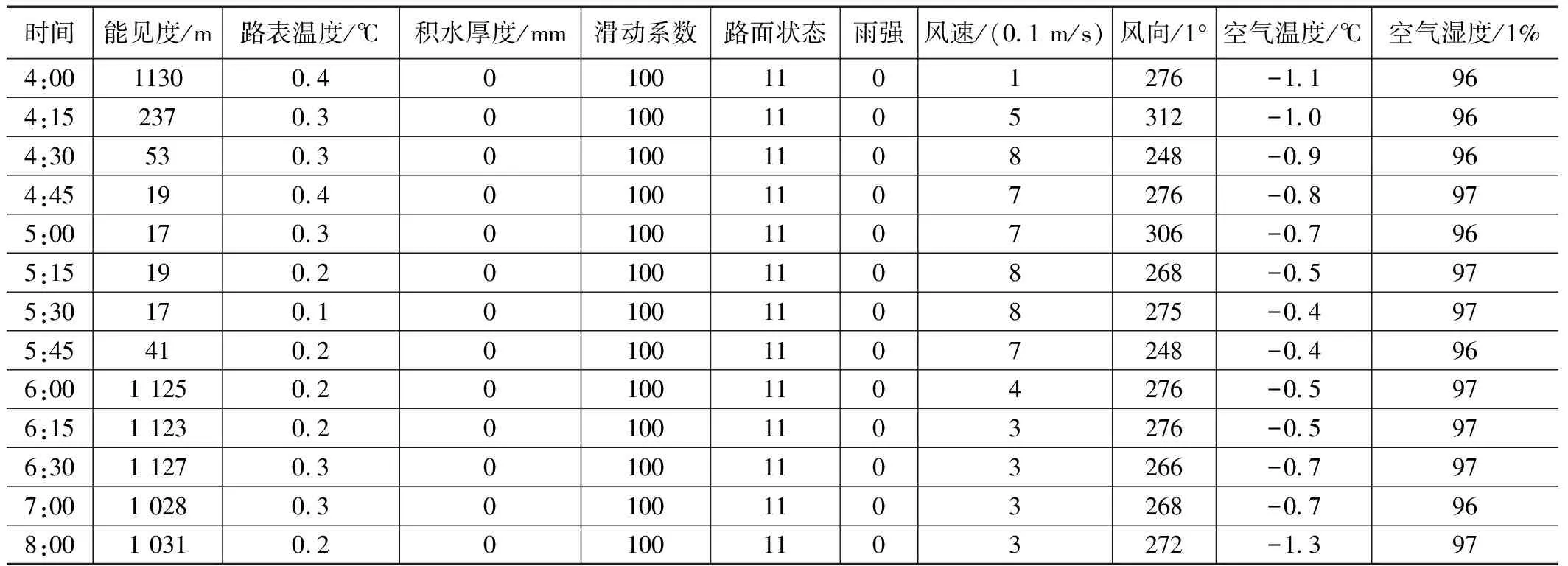
表3 子站3气象数据

表4 子站3团雾预测
子站4区站号Y6004,提取整理后的气象数据如表5所示。
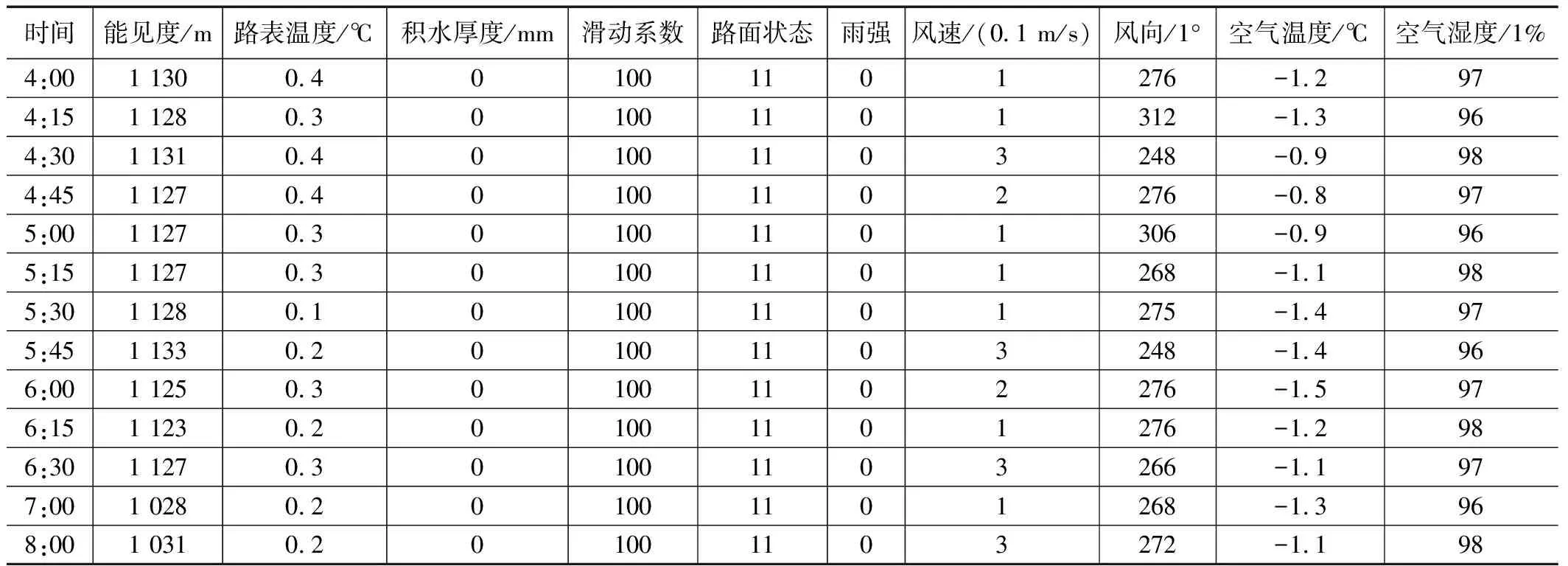
表5 子站4气象数据
由表5可见,子站4的能见度始终在1 km以上,与子站3的路表温度最大相差0.1℃,降水量为0,风速最大0.3 m/s,空气温度与子站3相差最大1 ℃,子站4平均气温比子站3平均气温低约0.4 ℃。空气湿度在96%以上。
在4:30-5:45,子站3的能见度低于100 m,子站4的能见度大于1 km,因此,团雾出现在子站3与子站4之间。
表6是边缘计算终端利用ESN算法和子站4历史气象数据对团雾出现的概率进行的预测,表中,团雾是否出现,由雷视一体传回的子站4气象图片人工确定。

表6 子站4团雾预测
表6中,对子站4的团雾预测概率在60%以下,子站4附近没有出现团雾。对比表4和表6,可以发现,团雾在子站3出现,在子站4没有出现,即团雾出现在子站3与子站4之间,符合实际情况。ESN算法利用主站和子站的气象历史数据,对是否出现团雾做出了准确的预测。
在表4中,6:00预测的概率为56%,但是没有出现团雾。在表8中,在4:30、4:45、5:00、5:15预测概率超过50%均未出现团雾。因此,不能将团雾预测概率定为50%来判断是否存在团雾。
6 结束语
基于黄河特大桥的气象条件,设计并开发了一种基于ESN的团雾预警系统。预警系统利用气象、视觉等设备获取黄河特大桥环境条件,采用Zigbee网络传输信息,在边缘计算终端中运行ESN预测算法,对黄河特大桥是否出现团雾进行预警。实验结果表明,本系统能较好的预测黄河特大桥是否出现团雾,对黄河特大桥风险管控有着重要意义。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
邮电设计技术(2021年2期)2021-03-13
计算机与数字工程(2019年11期)2019-11-29
科技创新与应用(2018年11期)2018-04-25
农业与技术(2017年13期)2017-08-23
中国新技术新产品(2016年23期)2016-12-26
安徽农业科学(2016年4期)2016-10-21
科技视界(2016年1期)2016-03-30
科技与创新(2015年18期)2015-09-11
现代农业科技(2009年19期)2009-03-20