基于Arduino的可跨越式智能擦玻璃机器人研究
2022-10-27 08:14单梦凯胡西雷孙硕硕龚思奇李珍妍
科技创新与应用 2022年30期
单梦凯,胡西雷,孙硕硕,龚思奇,李珍妍
(1.郑州科技学院,郑州450064;2.黄淮学院,河南 驻马店463000;3.河南科技学院,河南 新乡453003;4.郑州经贸学院,郑州 451191)
伴随着城市发展的趋势,大城市里愈来愈多的多层建筑相继出现,而高大的建筑玻璃幕墙的清洁工作变得更加繁重危险。人工进行高层清洁往往需要高费用,并且效率低风险性极高,而面对家庭和大型商场的玻璃清洁终将变成一个极大的销售市场。商业服务上,许多店铺和公司必须聘用或签订房产公司来清洁高层住宅或落地玻璃窗。经调查显示,在一线城市,占地面积约10 m2的门店门窗玻璃,人工费用每月为500元,占每日清理花费的30%,而且仍有增多的发展趋势[1]。
目前市场上的擦窗机器人原理和结构不一,但大多数对工作环境和玻璃表面有着极其严苛的要求,在面对家庭和商业门店玻璃清洁工作中往往发挥不出优势,面对这种情况本文提供了一个全新的思路,本文通过基于Arduino(开源电子原型平台)嵌入式系统实现擦窗机器人的可跨越研究,来实现擦窗机器人的进一步升级。
1 擦窗机器人研究现状
1.1 真空负压吸附
目前国内外市场所提供的智能擦玻璃机器人吸附都是根据真空泵和真空发生器相配合的抽取真空吸附式与离心风机式负压吸附2个类目,这2个类目可统称为真空吸附[2]。比较常见的有HOBOT/波妞、ECOVACS/科沃斯和BOBOT等主流品牌擦窗机器人,价格1000~3 000元不等。
1.2 磁吸附
Windoro系列是智能擦玻璃机器人市场中少有的选取磁吸附方式的智能擦玻璃机器人,但清理工作过程中也会有工作盲区,另外玻璃厚度也会带来影响。经过产品迭代,目前市面上现有的磁吸附擦窗机器人已经少见,主要原因是玻璃多样性的增加导致磁吸附已经不能满足正常使用。
2 本文主要研究内容
本项目确定以Arduino单片机为主控制系统,提出双风机双密闭环境设计,并制作出3D模型图雏形,根据功能需求分析出系统控制原理,并选取了12 V、29 r/min的直流减速电机作为左右驱动轮的动力来源,选取L298N芯片作为左右驱动,编写Arduino程序利用点控式开关所反馈的串口信息来控制左右减速电机的转速调控和正反转,再通过对左右电机的转速调控测试出擦窗机器人碰窗换向的实际转速,以此实现擦窗机器人的转向和循迹功能。另外配备有压强和防掉落感应器为机器正常工作保驾护航。
3 擦窗机器人总体设计方案
3.1 总体设计目标
可跨越式擦窗机器人关键应用单层吸附计划方案,必须具备安全性、全过程清理、清洁擦洗和智能遥控器等几类基本要素,另外在此基础之上增加了玻璃连接缝隙的可跨越功能,在保证安全基础的前提下通过芯片智能控制、多传感器协助合作,实现多玻璃之间清洁工作。
3.2 关键技术实现方案
本文所涉及的可跨越式擦窗机器人主要由以下5大部分组成,包括驱动结构、吸附结构、传感结构、清洁结构和遥控结构。驱动及吸附模块是擦窗机器人的核心部分,首先对市面上现有的擦窗机器人驱动及吸附方案进行分析最终采用了直流减速电机协助防滑硅胶传送带作为驱动,无刷离心风机构成密封负压吸附模式,通过SolidWorks软件进行3D建模,设计出适用于多环境下工作的可跨越式擦窗机器人,最后根据擦窗机器人巡迹、遥控和跨越等模块搭建完整控制系统。
3.3 擦窗机器人结构设计
3.3.1 基本结构设计
擦窗机器人的基本结构方案为:无刷电机负压吸附、腔体式结构,采用直流减速电机,硅胶履带;清洁模块采用高密度纤维布,同时配备2个风机及2个密闭腔体。内外部结构实物图如图1所示。

图1 机器人内外部结构模型图
3.3.2 吸附结构设计
选用24 V、23 900 r/min的负压风机作为吸附驱动,使机内压强大约为2 800 Pa,通过内部环流密闭环境从底部吸入空气,再从侧面出风口排出,以达到安全吸附到玻璃表面的效果,同时选用GY-63 MS1-01BA03气压传感模块实时检测擦窗机器人内部压强值,当机内压强小于2 800 Pa时,便通过串口信息反馈给Arduino mega 2560总控制驱动芯片,从而通过调整PWM值来改变负压风机转速,加大机内气压,使机器牢牢地吸附在玻璃表面[3]。
3.3.3 驱动结构设计
选取了12 V、29 r/min的直流减速电机作为左右驱动轮的动力来源,选取L298N芯片作为左右驱动,履带方面选用硅胶材质防滑履带,增大了与玻璃表面的摩擦因数,防止擦窗机器人在工作过程中出现打滑的现象,配合双风机双密闭环境的负压风机真空吸附,能够解决传统擦玻璃机器人无法在拼接玻璃表面工作的痛点,实现玻璃缝隙间的可跨越[4]。
3.3.4 防掉落结构设计
机身四周分布4个光耦传感器,当擦窗机器人行驶到玻璃边缘时光偶传感器能及时反馈给机器人,防止机器人跌落,使机器人能在无边框的门窗上使用,同时机器人周围还分布有8个撞板力敏传感器,能在机器人到达窗户边框时把信号反馈给机器人,实现自身的巡迹功能,此外机器人底部还有真空压力传感器,能及时检测机器人底部压强变化,保证擦窗机器人能安全地吸附在玻璃上。
3.3.5 密封清洁模块设计
可跨越式擦窗机器人与市面上常见的擦窗机器人相比,主要区别就在于采用自主设计的密封腔体,能够在擦窗机器人跨越玻璃缝隙的时候保持腔体内的气压稳定在安全值之内。清洁模块的设计对清洁效果起主要影响,另外采用特殊的工艺设计和结构布置,清洁模块还对负压系统起密封作用。
4 擦窗机器人控制系统
4.1 擦窗机器人控制原理
可跨越式擦窗机器人系统构成包括5大部分——负压风机、左右驱动步进电机、传感模块、清洁模块和红外遥控模块。风机方面采用真空吸附,通过机体内部2个无刷电机达到一定转速实现机器底部吸入空气,再从机器顶部出风口出风实现内外压强差大约为2 800 Pa,搭配自主设计双腔体结构,从而保证擦窗机器人能牢牢地吸附在玻璃表面,在进行缝隙跨越时,2个风机相互配合使机体内压强恒定,保证擦窗机器人安全通过玻璃缝隙,系统控制原理图如图2所示。

图2 机器人系统控制原理图
4.2 控制电路
擦窗机器人的供电电压为24 V,总容量为3 000 mA,可持续工作3~4 h,只需3 h即可充满,本机器人采用的Arduino mega 2560芯片可使用5~12 V供电,驱动芯片需要外接12 V外接电源,工作温度在40~90℃之间。
5 擦窗机器人智能巡迹方案
5.1 智能巡迹清洁方案总设计
总控制芯片及驱动控制器芯片L298N来实现机器的巡迹功能。并利用程序来控制2个电机的不同转速,以实现机器人自身控制“N”或“Z”型路径,最终实现擦窗机器人的清扫工作。
5.2 智能巡迹清洁路径规划
自动清洁方案是指机器人可以自动识别窗户边框,按照前文设定的全覆盖清洁路径在玻璃表面行走1圈,并在行走的同时完成清洁任务,实现无人操控,方便使用,解放用户的双手。
5.3 擦窗机器人运动学模型分析
5.3.1 直线运动模型分析
擦窗机器人在正常工作时其受力处于稳定状态,所受重力和履带摩擦力大小相等方向相反,无刷风机提供的吸附力和玻璃的弹力正好处于平衡状态,擦窗机器人通过控制驱动芯片的电压来控制擦窗机器人的移动速度。
5.3.2 旋转运动模型分析
擦窗机器人在接触到玻璃边框时,或者再无边框玻璃上工作时,碰撞传感模块会反馈数值给总控制芯片,同时用语句函数digitalWrite(pin1,HIGH)和digitalWrite(pin2,LOW)控制点击左右转向,实现智能巡迹中的转向功能,其工作原理就是总控制芯片控制驱动模块的PWM接口的电压来达到不同的转速效果,这一工作原理是使用analogWrite(pinPWM,SpeedValue)语句函数实现的。
5.4 自动巡迹清洁方案设计
本节提出来如下的自动清洁方案:
(1)在智能擦窗爬壁清洁机器人的四周加上8个碰撞传感器,可以在机器人触碰到玻璃边框的时候,将信息传递给底层主控制器,进而帮助机器人识别窗户边框。
(2)当识别到边框后,根据全覆盖清洁路径,再综合机器人运动学模型的分析结果来控制左右履带的行进速度,进而完成相应的动作。
(3)机器人在移动过程中主要是完成直线、左转和右转3种动作。
5.5 遥控清洁方案设计
由于自动清洁工作模式下,机器人的清洁工作存在死角,因此用户可以选择远程遥控方式。在远程遥控工作模式下,主控制器将机器人当前的诸如启停、行驶速度和行驶方向等状态信息通过远程通信单元上传给上位机控制软件,并在控制界面显示。用户可以根据机器人的当前状态信息,通过控制手柄对机器人进行手动的远程控制。
6 可跨越性实验研究
6.1 可跨越过程原理分析
可跨越性过程分析:擦窗机器人在接触到玻璃间的夹缝时,第一个密闭环境压强降低,GY-63 MS1-01BA03气压传感模块反馈信号给Arduino控制芯片,Arduino控制芯片接收到信号后,提升风机接口的PWM值,从而加快风机转速,同时控制L298N电机驱动模块使2端电压降低移动速度。当机器第一个密闭环境通过夹缝后,机器会暂停,然后等到第一个真空环境达到安全值时再平稳通过,最终实现玻璃之间的跨越,擦窗机器人3D模型图如图3所示。
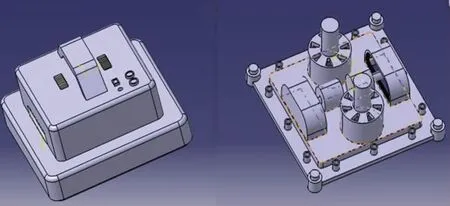
图3 擦窗机器人3D模型图
6.2 擦窗机器人运行效果测试
(1)清洁效果:测试前后对比表明机器人对干燥玻璃及表面带有水渍的玻璃的清洁效果良好。
(2)擦窗机器人运行噪音测试:运行噪声最大达到83 dB,距离越远噪声越小,且噪声强度下降的梯度随距离增加而减小,当距离机器人3.5 m时噪声强度基本不再变化,与环境噪声基本一致。
(3)擦窗机器人安全措施测试:擦窗机器人配备有防掉落安全绳和低电量报警模块,能够防止机器人从高空坠落造成伤亡,而低电量报警模块则能够及时提示用户充电,以便使用。
7 结束语
设计本产品的初衷就是使每一位用户减轻生活家务负担,迎接品质新生活。对于中国户型的小面积玻璃设计,可跨越式机器人本身就有着先天的优势,而市场上的擦玻璃机器人清洁面积有限,更具有无法保证能在有缝玻璃表面工作的局限性,因此实现玻璃表面的跨越显得尤为重要。
猜你喜欢
建材发展导向(2022年10期)2022-07-28
中国药学药品知识仓库(2022年10期)2022-05-29
机电信息(2022年9期)2022-05-07
中国水运(2022年4期)2022-04-27
现代仪器与医疗(2021年5期)2021-12-02
中国化工贸易·中旬刊(2018年6期)2018-10-21
小雪花·成长指南(2016年9期)2016-10-12
消费电子(2015年7期)2015-12-11
城市建设理论研究(2014年37期)2014-12-25
中国民族民间医药·下半月(2014年4期)2014-09-26