
基于红外传感器的智能大棚内的田鼠捕获装置的设计与实现
2022-10-26 11:28:48李浩伟吴立哲吴修权高树伟张远军
科学技术创新 2022年29期
李浩伟,吴立哲,吴修权*,金 航,高树伟,张远军
(1.山东农业工程学院,山东 淄博 255000;2.聊城大学,山东 聊城 252000;3.山东交通学院,山东 济南 250000;4.临沂大学,山东 临沂 276000)
1 系统总体设计
本设备整体设计思路框图见图1。
基于红外传感器的智能大棚内的田鼠捕获装置主要是由触发器功能电路,红外传感模块,警示灯处理模块,电源模块等组成。电源模块[1]由电池组进行供电,成本低,效率高。红外测距模块通过检测田鼠等生物的进入并作出响应,通过继电器模块闭合闸门,完成捕获田鼠的操作。通过零件之间相互配合,完成装置的闸门开合过程,触发器信号电路接收来自红外处理模块所给予的信号,通过双J-K 触发器负边沿触发,通过逻辑电路控制闸门的开合,最后完成捕获鼠类的工作,警示灯提醒说明操作完成。
2 装置结构设计
2.1 红外线测距感应装置
AS312 型号智能红外传感器模块能通过检测生物的进入,同时给予中央处理器信号,通过信号的反馈,控制铁笼的上升和下降,用来达到捕鼠的效果。原理是通过局部的信号作用,通过红外线测距模块发出测距信号,使用3 mm 红外线发射管,最大正向电流为30 mA,反向耐压值为6 V,最大功耗可到达80 mW,最大工作温度在-25 ℃到70℃,通过采用三极管放大电路以及运算放大器的配合电路设计,是该模块的可检测波长在大大提高,通过配置电位器来时模块具有数字和模拟输出信号。
2.2 电池放电模块
电池放电模块[2]由单排电池组构成,配有电池充电保护模块,电池组放电迅速,便于回收。背部的电池保护模块能够防止电流过载,电池组充电完成自动断电,电压稳定在5 v 左右,性能稳定,成本较低,对于机械设施控制系统的电压容错率较高,能够独立完成机械结构与触发器的分别供电[3]。
2.3 特殊类型的机械结构
本项目采用了舵机联合伸缩杆进行开关闸门的机械结构,对于闸门的开关闭合可以通过按键开关以及触发传感器的方式进行控制,当触发器发出高电平信号时,舵机启动控制连轴底座旋转,进而调整伸缩杆方向的变化,伸缩杆末端连有闸门顶端,通过不同方向的伸缩杆平移变化,带动闸门进行上升和下降。舵机选型为180°旋转45 kg 的同轴机型,对机体本身容错率较高,带动重物时震荡率低,能够稳定的发挥其效能,带动闸门稳定开启和关闭。
2.4 控制模块
2.4.1 触发器功能和特点[4]
触发器是能够记忆一位二进制信号0 或1 的基本逻辑器件,把若干个触发器组合在一起便可以记忆多位二进制信号。为了实现这种记忆的功能,触发器应具有两种能自保持的稳定状态来记忆0 或1 两种逻辑状态。如Q=0、Q=1 表示0 状态,记作Q=0、Q=1、Q=0 表示1 状态,记作Q=1。
所有触发器都具备以下两个工作特性:
(1) 具有两个稳定状态(1 态或0 态),在一定的条件下,可保持在一个状态下不变。
(2) 在一定的外加信号作用下,触发器可从一种稳态转变到另一种稳态。
根据功能不同,触发器可分为:基本RS 触发器;RS 触发器;JK 触发器;D 触发器;T 触发器;T 触发器。根据触发方式不同,触发器可分为:电平触发器;主从触发器和边沿触发器。根据电路结构的不同,触发器可分为:基本RS 触发器;同步触发器;主从触发器和边沿触发器。
2.4.2 触发器功能选择以及原理介绍
采用双J-K 负边沿触发型芯片74LS112 功能芯片,在输入信号为双端的情况下,JK 触发器是功能完善、使用灵活和通用性较强的一种触发器。
(1) 当J=0,K=0 时,触发器维持原状态,Qn+ 1=Dn。
(2) 当J=0,K=1 时,不管触发器的原状态如何,CP 作用(下降沿)后,触发器总是处于“0”状态,Qn+1=0 。
(3) 当J=1,K=0 时,不管触发器原状态如何,CP作用后,触发器总是处于“1”状态,Qn+1=1。
(4) 当J=1,K=1 时,不管触发器原状态如何,CP作用后,触发器的状态都要翻转,Qn+1=Qn。
本系统选用双J-K 负边沿触发器74LS112 芯片进行电路设计,其逻辑符号见图2,芯片功能原理图见图3。
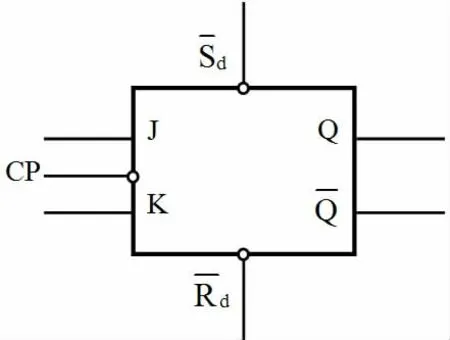
图2 74LS112 逻辑符号图
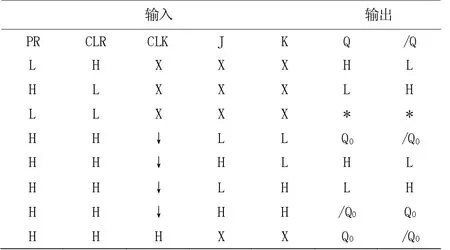
图3 74LS112 芯片功能原理图
具体结构见图4、图5。
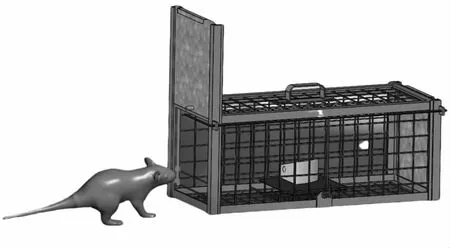
图4 效果展示图1
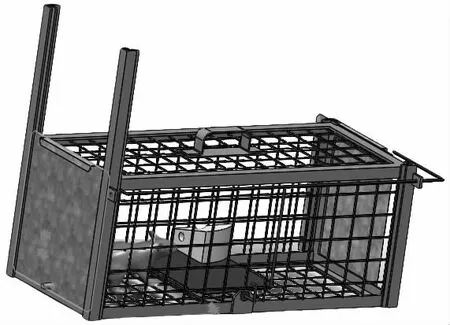
图5 效果展示图2
当田鼠[5]看到笼中的食物,会试探性地对周围环境进行危害性检测,田鼠在进入笼中初,触碰到红外测距感应开关,系统将数据传送给中央处理器,但并不执行关笼操作,当田鼠放松警惕,进入笼中觅食时,触碰到靠近食物近端的红外传感器模块,中央处理器会发出信号,控制笼子关闭,从而束缚住田鼠,完成捕鼠操作。
如上图所示在捕鼠器内放置诱饵,P1、P2 为两个红外检测传感器,S 为闸门。当老鼠进入捕鼠器进食时通过P1 闸门不动作,当到达P2 位置时闸门S 关闭。当红外检测到老鼠时P1、P2 输出高电平,没有老鼠时保持低电平。闸门开关S 默认输出低电平,闸门不闭合。当S 输出高电平时闸门闭合。
即:
(1) 当P1、P2 都为低电平时,说明没有老鼠,输出S 为低电平,闸门不关闭。
(2) 当P1 为高电平,P2 为低电平时,说明老鼠进入闸门,此时输出S 为低电平,闸门不关闭。
(3) 当P1 为低电平、P2 为高电平时,说明老鼠已经进入正在觅食,此时输出S 为高电平,闸门关闭。
(4) 当P1、P2 都为高电平时,说明有多只老鼠同时进入,此时输出S 为高电平,闸门关闭。
其程序流程图见图6。
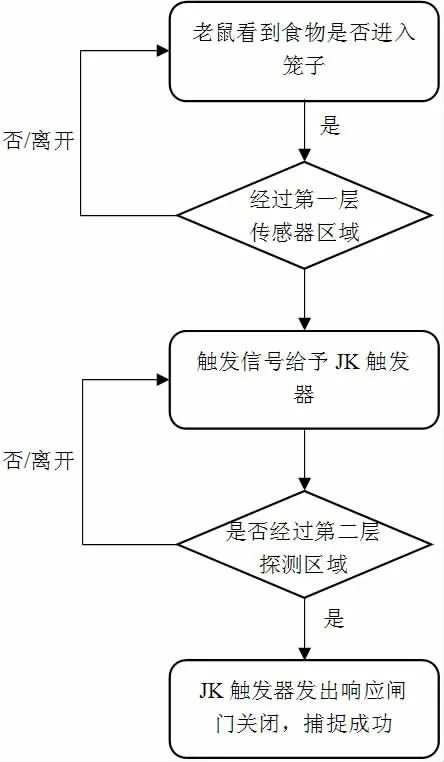
图6 程序流程
根据系统设计方案可以得到大棚多点温度采集温控系统的真值表(见表1)、卡诺图表(见表2)。
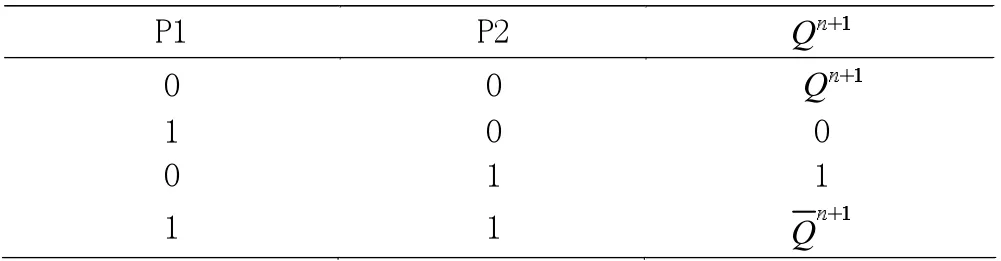
表1 系统真值表
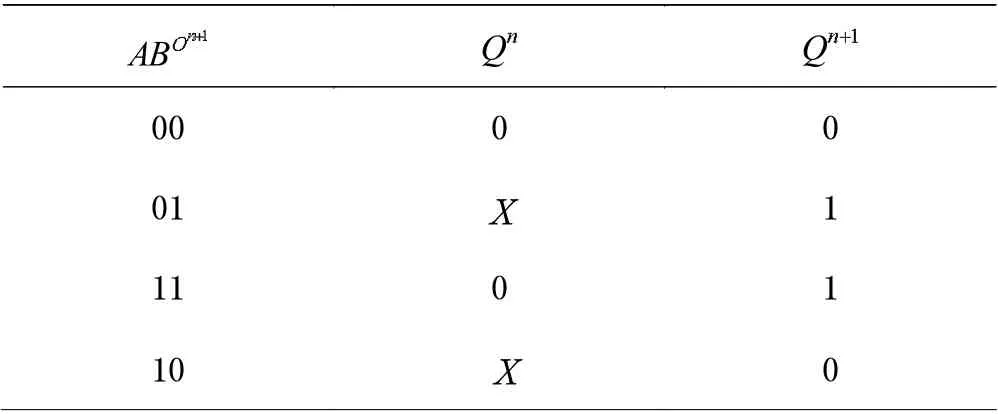
表2 系统卡诺图表
如图7 所示,将电路中的SD 与RD 接口置1,同时CP 为下降沿有效,设A 为第一个红外传感器的传输信号(默认状态为低电平),B 为第二个传感器的传输信号(默认状态低电平),将A、B 分别接入到K、J 触发器上,当老鼠触碰到第一个传感器时转换为高电平,如果不再继续前行则保持闸门开启,如果触碰到第二个传感器则B 信号为高电平,闸门关闭,完成捕捉动作。
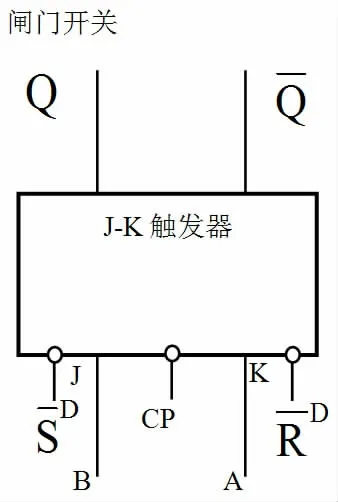
图7 逻辑电路图
根据图8 的波形实现图所示,在SLK/CP 时钟的映射下,触发器下降沿有效,在J 触发/K 触发关闭的情况下置一,在单独K 触发的情况下输出并不发生变化,而双触发器同时工作的情况下输出会在原来的状态下进入反转,改变原来的输出状态,本产品利用双JK 触发器的原理进行捕鼠操作,在与或门的配合下完成机械结构的配合,从而实现红外测距的实现和笼门关闭。
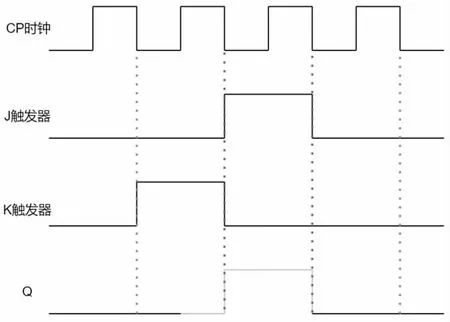
图8 电路波形实现图
3 产品优势对比
根据市场调研,我们从市场上了解到了几种现有的智能捕鼠设施,发现大多数捕鼠设施多采用单片机控制,将其与我们的产品进行了性能与产品优势上的对比,见表3。
如表3 所示,各类捕鼠设施在产品特性方面大相庭径,但在基础功能的实施上并不存在过多的差异,较单片机型捕鼠器,双JK 触发器型捕鼠设施在灵活性和适用度方面较为亲民,能够大面积普遍推广,经济适用度较高,能够在粮食生产领域得到广泛的应用和推广。
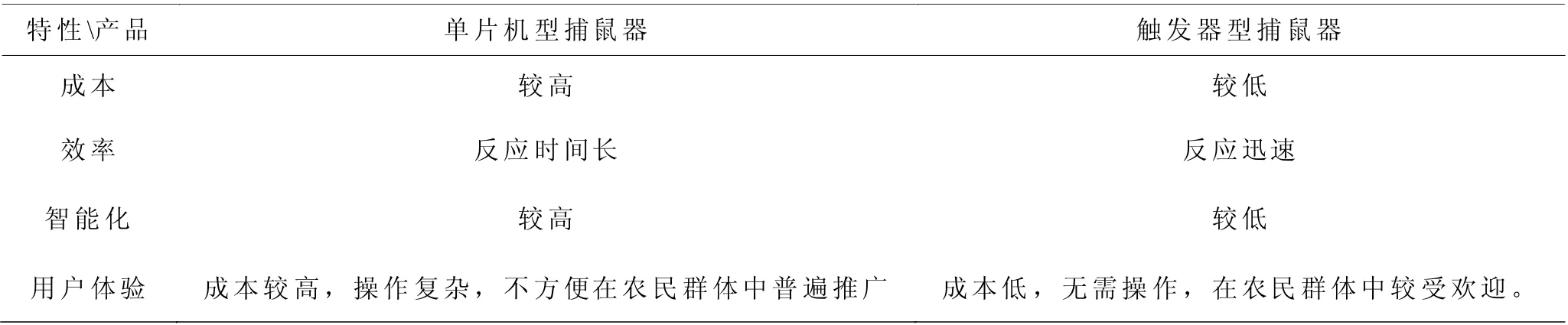
表3 产品优势对比
在未来设想上,我们计划用JK 触发器以及D 触发器联合使用,同时使用三个红外传感器,相互配合完成捕捉多只老鼠的工作。其概念图见图10。

图10 概念图
4 产品概念模型
该系统采用反馈控制的基本控制方式,类似于龙门刨床速度检测的自动控制过程(系统控制方块图如图9 所示),在基本组成上分为测量元件、给定元件、比较元件以及放大元件。
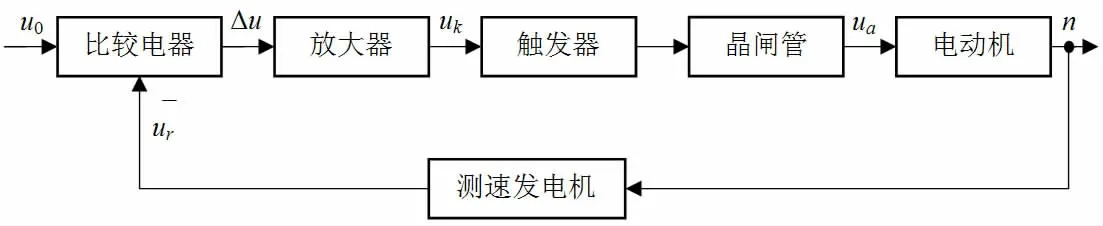
图9 龙门刨床系统控制图
在系统控制图的前向通路部分,由触发电路、放大器、触发器等控制元件对被控对象进行对被测量的变化负责,而主反馈通路用于测量被控量的“偏差”作用,对偏移量直接测量并返回给比较电路,由被测量初始值和偏差值进行对比,返回偏移量作用于被控对象上,进行实时更新被控量。
当然,我们应该指出,本系统和龙门刨床系统在原理上也类似,都属于有静差系统,在系统正常运作的前提下,允许红外检测装置的速度反馈存在稳态误差。
按反馈控制方式进行的组成的反馈控制系统,能够抑制内外扰动对被控量影响的能力,有较高的控制精度。但是此类系统采用的元件多,控制复杂,特别是系统的性能分析和设计也较为麻烦。
5 实际产品模型
由于龙门刨床系统在运行时采用单次反馈,并不能很好的实现本项目的功能。所以在实际的大棚捕鼠系统采用了内回路和主反馈通路并行的结构,在测量元件(红外传感装置)检测到有老鼠通过时,会传输单次偏移量给予与门存储,当接近食物或者多只老鼠进入笼中时,第二触发器发挥作用,闸门关闭,完成捕捉。龙门创床与大棚捕鼠装置适用性对比见表4。

表4 龙门创床与大棚捕鼠装置适用性对比
图10 中的A、B、C 分别对应着红外传感器的位置关系(由外向内),当有多只老鼠进入时,机器闸门并不会关闭,当老鼠吃完奶酪进行回程时,闸门关闭,封锁住了老鼠的路线,最终捕捉到多只老鼠。
6 产品未来展望
6.1 控制方式精准化
在闭环反馈控制方式的基础上,加上基于电流扰动测量的开环测量,且保证电路有且仅有单个扰动因素作为补偿,对其他扰动均不起补偿作用,在此情况下,系统中的主要扰动已被补偿,其余的反馈控制部分也比较容易设计;复合控制方式的精度高且稳态误差小,适合用于高精度检测仪器中的反馈。
6.2 控制智能化
在现有电路的基础上,设计以STM32F4XX 为内核的单片机控制系统,采用TCR 系列红外对管检测模块,遵循IIC 协议,可以主动发射红外线探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。(反射面平整、颜色浅的物体反射距离远,感应的灵敏度也高;反射面凹凸不平,颜色越深的物体反射感应距离和灵敏度会下降);同时设置看门狗和低功耗,使设备在没有外部中断的作用时处于睡眠状态,看门狗用于防止设备在中断内部运行时发生错误,迅速重启设备不影响消费者使用。
6.3 后备电力能源供应
光伏发电板效率低下,成本高且稳定性差,受天气影响较大。在光伏电池板电力即将耗尽时,迅速切换到带有电池保护功能的蓄电池组,代替光伏供电版进行供电。蓄电池组容量储备较大,能帮助设备更好的匹配环境。
猜你喜欢
大学物理实验(2023年5期)2023-10-27 13:04:52
作文大王·低年级(2022年2期)2022-02-28 02:04:51
轨道交通装备与技术(2021年5期)2021-11-19 11:46:46
小学生优秀作文(低年级)(2020年6期)2020-07-06 02:37:20
汽车维修技师(2018年7期)2018-12-07 08:23:44
电子世界(2017年22期)2017-12-02 03:03:45
网络安全和信息化(2017年4期)2017-03-08 19:09:03
海外星云(2016年15期)2016-12-01 04:18:18
儿童故事画报(2013年5期)2013-04-29 12:37:20
微处理机(2012年5期)2012-07-25 03:21:06
