一种JTIDS 信号批号的离线合批方法
2022-10-24 13:38:30潘定平朱宇锋
航天电子对抗 2022年4期
潘定平,朱宇锋
(中国电子科技集团公司第三十六研究所,浙江 嘉兴 314033)
0 引言
联合战术信息分发系统(JTIDS)是美国为适应三军联合作战而研制的综合通信、导航、识别系统,是美军自动化战术C3I 系统的重要组成部分,具有用户多、容量大、生存能力强、使用灵活、功能齐全的特点,已成为美军及其盟友空对空、空对舰、空对地数据通信的主要方式。美国及北约所广泛使用的战术数据链Link16 就采用了JTIDS 作为它的主要结构形式,被美国国防部确定为三军联合作战用数据链。
在战术任务角度,JTIDS 网内成员主要分为任务执行成员、任务指挥成员和空中接力成员,其中任务执行成员具备数量多,但发射信息少且每个成员占用时隙数少的特点,这种特点往往会造成JTIDS 目标批号在方位和时间上的不连续,且JTIDS 端机覆盖海陆空各种平台,其运动轨迹复杂多样,进一步加大了获得稳定连续的信号批号的难度,从而造成增批现象,为此,本文提出一种离线合批方法,可在一定程度上纠正上述增批问题。
1 JTIDS 信号概述
JTIDS 信号在时域和频域上均具有固定且鲜明的特征。
在时域上,JTIDS 数据链系统采用时分多址(TDMA)的工作方式,其时间网络具有周期性,时间轴依次划分为12.8 min 的时元,时元又划分为64 个时帧,每个时帧又划分为1 536 个时隙,每个时隙发射一组脉冲信号,如图1 所示。

图1 时域特征
频域上,JTIDS 采用跳频技术,载频从969~1 008 MHz(13 个 跳 频 点)、1 053~1 065 MHz(5 个 跳频点)和1 113~1 206 MHz(33 个跳频点)3 个子频段均匀选取跳频点,脉冲跳频间隔30 MHz 以上,如图2所示。
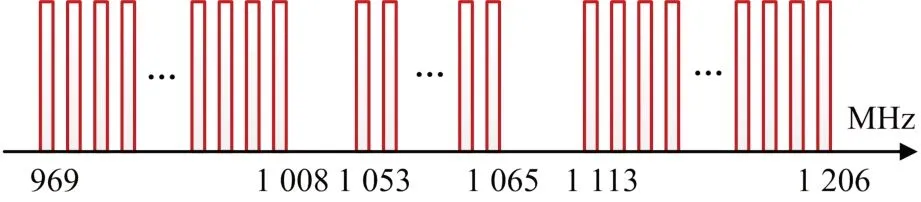
图2 频域特征
JTIDS 数据链系统各个用户的发射时隙在时域和频域上严格遵循上述特点,且每个系统成员均设计有与基准时间同步的计时系统,因此可采用时频分析及信号相关处理技术完成多站测向交叉定位或测向测时差定位,完成JTIDS 数据链目标端机的经纬度计算,如图3 所示。
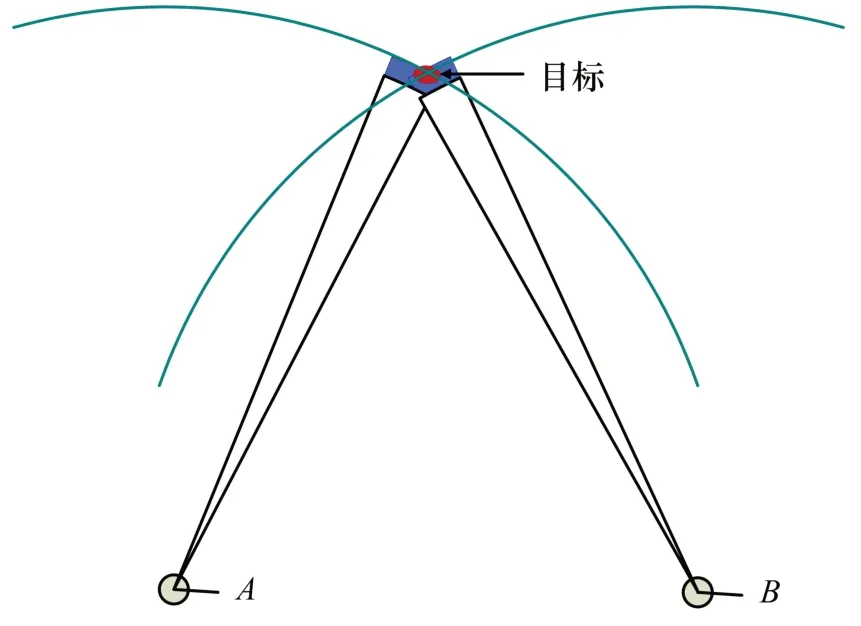
图3 定位原理示意图
2 批号合并方法
针对信号增批问题,基本可分为2 种主流解决措施:一是基于信号增批原理,改进目标侦察方式,杜绝增批问题的出现;二是在增批问题难以避免的情况下,通过算法后处理完成批号的合并。后者又可细分为同一时间段内的虚假目标截获导致的识别维增批,以及同一真实目标因截获时间离散造成的时间维增批。
针对识别维增批问题,关一夫和罗长胜等人曾在文献[7-8]中提出了对脉冲重复周期(PRI)信号在载频维和脉宽维进行合批,以及基于近邻函数值准则的改进聚类算法进行合批的方法。
但现有的公开资料中,很少涉及通信信号获取领域的增批问题及解决方法研究,其难点在于通信的应用场景大部分是同频同体制组网,因此同频多目标场景的批号建立往往只能依赖于方位信息,基于JTIDS信号本身的技术特征,可在方位和时间两个维度进行建批,因此批号正确率已经有了较大的改善,但相对应的,时间维增批问题也更难以解决。
而且由于JTIDS 网内成员数量众多,若通过放大方位和时间阈值进行批号的简单合并,极易造成错误合批。但JTIDS 信号本身的技术特点,使得批号的正确合并具备了可行性。下面主要针对JTIDS 增批问题进行批号离线合并的方法进行说明,需要注意的是,本方法只适用于已完成定位的JTIDS 数据。
2.1 合批流程
假设获得的JTIDS 数据共建立了个批号,其中定位后共建立了个批号,以集合{R}(=1,2,…,)表示,其中R除表示批号值外,还包含批号值对应的方位、经纬度和时间等信息,本文算法只对批号集合{R}进行合批。
为最大程度实现批号合并,采用正向顺序遍历方式进行合批,具体流程如图4 所示。
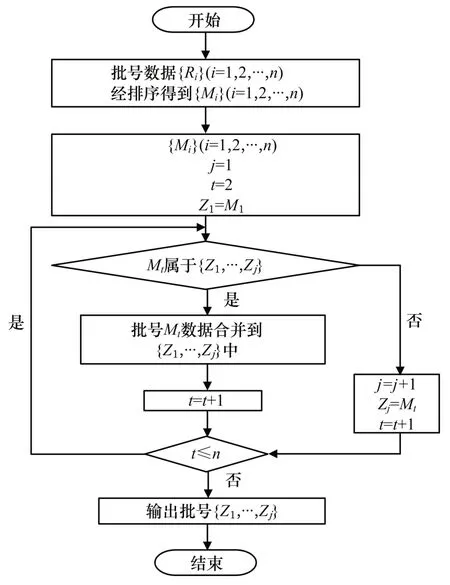
图4 离线合批方法流程图
具体步骤如下:
a)提取批号集合{R}(=1,2,…,)对应的个批号起始时间=[S,S,…,S];
b)根据批号起始时间的大小进行正向排序,得到批号集合{M}(=1,2,…,);
c)初始值取2,初始值取1,=(同上,该等式表示将批号及其包含的方位、经纬度和时间等所有信息均赋予批号);
d)调用合批判定算法判断批号M是否合并到批号集合{,,…,Z}中,若满足合批条件,则进行批号及相应数据的合并,变量=+1,并重复步骤d);若不满足合批条件,则执行下一步骤;
e)变量=+1,Z=M,=+1,重复步骤d)。
上述步骤的主要难点在于批号M是否应归属于批号集合{,,…,Z},该判断需推算出批号集合{,,…,Z}在批号M对应活动时间段内的方位信息,从批号集合{,,…,Z}中找出与批号M方位信息符合度最高的批号,或反向得出批号M不归属于批号集合{,,…,Z}的结论。
2.2 运动/固定目标判别
固定和运动JTIDS 端机目标,具有不同的方位推算方式,因此需先判断批号集合{,,…,Z}中各批号的固定/运动属性。
对于绝对固定目标,其定位结果应有汇聚特性,可通过计算经度集合和纬度集合的标准差或定位区域大小来判断目标是否处于固定位置,若标准差或区域大小满足一定阈值,可认为该批号为固定目标,否则为运动目标。
本文通过判断定位区域大小来判定固定/运动属性,从经纬度集合中取最大值和最小值,得到两组经纬度(max(),max())和(min(),min())作为定位矩形区域端点,进而算出端点间距离,若满足式(1),则认为对应批号为运动目标,否则判定为固定目标。

式中,为固定/运动目标判断阈值,一般根据设备的目标位置获取精度取值。
在实际情况中,特别是JTIDS 数据获取设备位于机载平台时,大部分慢速移动目标同样可视为固定目标,针对这种情况,可通过判断某批号最后一段活动时间内的定位结果是否满足式(1),来判定目标批号的固定/运动属性。
2.3 合批符合度
对于批号集合{,,…,Z}中的固定批Z,可将经纬度集合{,}的均值作为目标的实际坐标(,)。
再依照时间先后顺序取批号M包含的组设备平台经纬度(jd,wd)(=1,2,…,),进而推算固定批坐标(,)在对应组时间点的方位信息θ(=1,2,…,),并依据式(2)计算固定批的合批符合度。

式中,变量表示某一固定批与M的合批符合度,数值越大,表示批号M和批号Z的符合度约高,变量θ(=1,2,…,)为批号M实际测到的组方位信息,其中(θ-θ)的值需通过叠加±360°限制在±180°之间。
对于批号集合{,,…,Z}中的运动批Z,为获得特定时间点的方位信息(特定时间依次取批号M对应的组时戳),需推算运动批Z的经纬度变化情况,本文默认目标为匀速直线运动(对非匀速直线运动目标,会得到批号合并匹配失败的结论),但在实际情况中可根据经纬度变化情况选择合适的拟合曲线进行方位推算。
默认目标匀速直线运动情况下,取运动批Z数据进行直线拟合,即以时间变化情况为横坐标,经度和维度分别作为纵坐标进行直线拟合,最终得到与组时戳相对应的经纬度(jd,wd)(=1,2,…,),结合批号M对应的组设备平台经纬度(jd,wd)(=1,2,…,),计算出运动批Z在对应时间点的方位信息θ(=1,2,…,),进而依据式(2)计算运动批的合批符合度。
除上述2 种合批符合度计算方式外,若批号M的活动起始时间小于固定/运动批的活动终止时间,则合批符合度默认取0。
2.4 合批判定
批号集合{,,…,Z}中所有批号均完成与批号M的合批符合度计算后,得到合批符合度数组={P,P,…,P},若该数组中的最大值P=max(P,P,…,P)满足式(3),则将批号M的数据合并到对应批号Z中,并删除批号M及其相关数据,否则认为批号M不满足合批条件,需独立成批。

式中,变量为合批符合度判断阈值。易知,取值过小会加大合批成功率,但会降低合批正确率,取值过大则会加大合批难度,因此在实际使用过程中,可根据设备的方位测量精度取值。若设备方位测量精度为(RMS),则合批符合度判断阈值满足式(4)。

3 Matlab 仿真分析
3.1 仿真结果
在代码实现过程中,设备的方位测量精度取3°,变量取值为1/(3)=0.111,样本数量取30(若数量不足30,则取样本实际总量)。另外,由于最终合批效果在一定程度上取决于批号样本数量,因此在算法实现过程中,若批号样本数量不足6 个,该批号的合批符合度默认取0。
首先取电磁环境相对简单、目标端机数量相对较少的数据作为离线合批仿真样本,合批前的方位时间变化趋势如图5 所示,共计有37 个批号,图5 中一种曲线颜色表示一个批号种类,曲线上具体数值表示相应批号(出现批号数值,表示该批号已停止活动),根据图5,观察者从主观层面上可基本判断出存在4 个真实目标可进行合批操作。
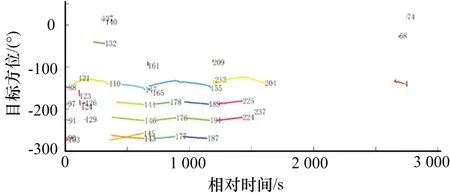
图5 合批前(方位时间变化趋势一)
运行离线合批算法后的方位时间图如图6 所示(虚线线段表示推算出的方位时间变化趋势),共计保留了22 个批号,有15 个批号被合批消除,从图6 中可看出剩余的22 个批号中大部分为样本数量较少的离散批,连续批基本完成合批。

图6 合批后(方位时间变化趋势一)
完成合批的批号如表1 所示(未参与合批的批号未列出),从表中可以看出,批号88 与批号147、155、204 和4 的合批符合度相对较低,这是因为该88 批目标为运动目标,所以方位推算精度相对较低。可知,合批结果与观察者的主观判断结果基本一致,但观察者的主观判断仅适用于简单场景,复杂电磁环境下,几乎不可能从主观上判断合批正确与否。

表1 合批情况
取电磁环境相对复杂的数据作为第二个离线合批仿真样本,合批前的方位时间图如图7 所示,共计有169 个批号(由于批号过多,已隐藏具体批号数值及位置),方位时间变化趋势相互交叉,难以通过人眼判断是否应进行合批。
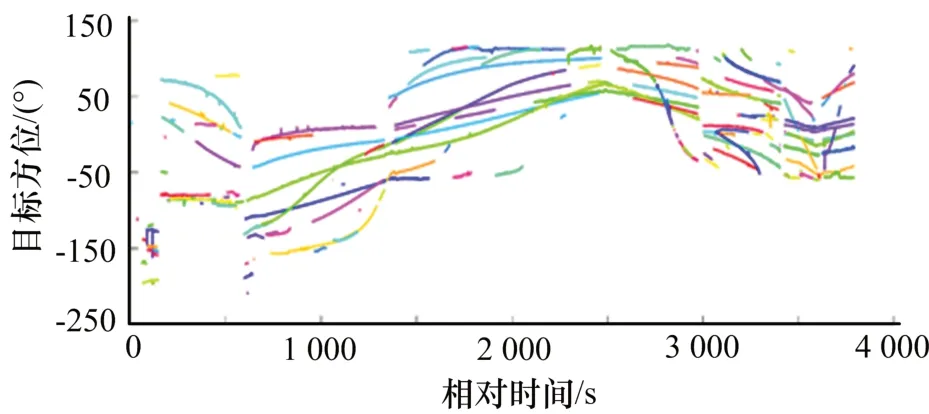
图7 合批前(方位时间变化趋势二)
运行离线合批算法后的方位时间图如图8所示,共计保留了83个批号,86个批号完成合批被消除,合批效率达到了86/169=50.9%,消除了一半以上的无效批号。
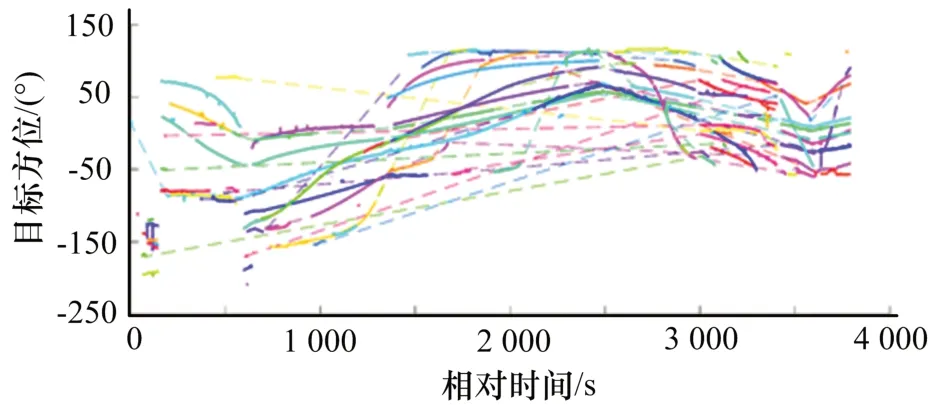
图8 合批后(方位时间变化趋势二)
3.2 算法复杂度分析
为推进后续合批算法的改进,对本文提出的算法进行时间复杂度分析。由于合批算法的特殊性,其复杂度很大程度上与数据样本相关联,为消除两者间的关联性,取运动批和固定批数目相等,经完成正向顺序排列后运动批和固定批呈随机排列状态,任一批内数据量均为,且个批号全部合批失败的特殊场景计算算法时间复杂度,
易知,在采用冒泡算法的情况下,运动/固定目标判别的时间复杂度为(),固定目标合批符合度计算次数如式(5)所示。

式中,固定目标的合批判定时间复杂度为(),运动目标的经纬度推算采用最小二乘拟合,因此其合批判定 时间复杂度为(+)。综上,考虑到一般远小于,因此可认为本文合批算法的时间复杂度为(nN)。
4 结束语
本文提出了先基于目标固定或运动状态的判断,再进行批号间合批符合度计算的合批方法,MATLAB 仿真结果表明本方法可完成大量错误增批的合并。而且在本文提出的合批流程框架基础上,可较易实现将通过其他情报获得的目标经纬度或运动航迹作为某一确定批号进行合批处理,即可兼容已知目标的建批及合批。
另本文提出了一种合批符合度计算公式,其符合度阈值由JTIDS 数据获取设备的方位测量精度决定,因此可以通过调整符合度阈值使本文合批方法适应不同设备获取到的JTIDS 数据。
目前本文的合批算法属于离线合批,如何降低其运算复杂度,提高运行时效,进而实现在线实时自动合批将是后续的主要工作重点。
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
防爆电机(2021年4期)2021-07-28 07:42:46
中国特种设备安全(2021年11期)2021-05-05 06:13:18
铁道通信信号(2020年6期)2020-09-21 09:23:34
中成药(2018年2期)2018-05-09 07:20:09
新课程·中旬(2017年1期)2017-03-27 19:32:35
环球时报(2016-08-01)2016-08-01 07:00:24
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00