智能制造人机协作运行功能标准模型研究
2022-10-22 02:23:42刘泽双王一帆
科技进步与对策 2022年20期
刘泽双 ,韩 金 ,王一帆
(1.西安理工大学 经济与管理学院,陕西 西安 710054;2.石河子大学 经济与管理学院,新疆 石河子 832003)
0 引言
工业 4.0 战略举措正逐步改变生产和运营管理系统,制造业通过智能连接和自动化实现智能化,经历范式转变并建立网络物理生产系统集成最先进的技术,加强人与技术的交互,实现向智能工厂的转型,加快实现生产系统中的自学习、自组织、自决功能及相关业务流程[1]。智能机器、高级分析技术和技术人员是工业互联网的3种重要要素[2],在可以预见的将来,人工智能技术将成为智能制造的主要驱动因素,不仅能拓展制造主体范围,还能优化智能生产过程,更能重塑人机协作模式。目前,大部分制造企业还处于数字化、智能化转型阶段,尚未达到人机无缝合作的水平,甚至还会出现1+1<2的情况。智能制造人机协作管理方面存在以下问题:首先,被解放出来的人力未被合理分配利用,人类和机器各自需肩负的责任界限比较模糊[3];其次,如何使员工适应一个无感情的合作伙伴是一大挑战,大部分员工无法从原有的组织存在形式中转变过来,与智能机器配合不够密切[4-5];再次,智能制造人才需求与现有人才之间存在技能鸿沟,市场上的智能化人才短缺[6];最后,在非智力因素方面,对某一方面素质的要求会远远超过传统一贯重视的某些品质[7]。加上政策和技术环境的不断变化,人机协作系统的运行功能标准可能随着技术的发展而发生改变。因此,结合具体技术发展和最新政策背景研究人机协作标准具有重要意义。
传统的人机合作范式在一定时期内被看作是研究人机关系的实用性分析框架,但人工智能给其带来较大冲击。很多学者认为,与前几次技术革命不同,人工智能技术引发的人机关系变革是巨大的[8]。通过梳理以往研究发现,人机协作理论大多以人为中心[9-10],很少从智能机器或二者结合的角度探讨双方形成的协作创新合力,甚至会夸大智能机器的负面影响。人工智能不仅会影响制造企业外部环境,如人才需求、意识形态、公共关系及技术运用[11-14],还会对企业内部人机主体产生深远影响,即人类和智能机器的主次地位问题,这关系到智能机器与员工是工具性、平等性抑或是被动性协作关系[15]。目前,学界缺少对智能制造影响下人机协作系统化的理论分析,鲜有文献提出智能化人机协作的相关治理思路。这就需要在厘清人工智能对人机系统运行和功能影响的基础上,对人机关系相关理论进行补充,完善智能制造下的人机协作标准和运行功能指导框架,维持智能化人机协作的平稳运行。
为充分探索智能制造中的人机协作标准,本文通过扎根研究、文献对比和专家讨论进行量表开发,基于大样本数据进行检验,得到可靠的人机协作运行功能标准测量量表,并根据得到的内容概念模型,克服传统管理学建模研究方法和一些代表性建模方法的局限性,基于对象过程方法论,提出研究智能制造人机协作运行功能标准的动静结合建模方法,该方法层次清晰且关联性强。
1 文献回顾
关于智能制造人机协作的研究主要从人机协作主导者和人工智能技术整合方式两个角度展开。
(1)按照对人类劳动者和人工智能两大维度的侧重程度分类。一是人类主导型研究。航空航天、造船和建筑等技术复杂行业的任务和过程需更多依赖人的主观能动性[16]。在智能制造对人类操作者的新要求下,产生了促进人类社会化可持续生产和人机共生的第四代操作工理念[17-18],在信息—人—物理体系中,人类的新角色可以归纳总结为操作员、代理商、使用者和传感终端用户等几种类型[19]。二是人机合作型研究。某些工种通常不仅要求人工智能提供大数据、信息支持、高效计算、快速管理等服务,还要求人类劳动者采取一些具有创新性的工作行为,与人工智能分工合作实现优势互补[20-21]。有学者结合人工智能时代工作的科学分类,立足人机匹配和人岗匹配的科学原理,形成3类“员工—AI—工作”组合[22],并基于人机任务团队角色的概念,指出人工智能队友在团队中可能扮演的4种角色[23],且不同类别的人类管理者对管理决策中的人机权重偏好不同[24]。此外,要有效安全地控制机器,还需准确推断何时需要人类操作,允许机器同步进行其它任务[25]。三是人工智能主导型研究。人工智能可以独立自主处理复杂性、常规性的低价值工作,人类只需相对应地担任控制者、指导者、监管者角色。例如,使用智能规划技术的人机任务分配方法[26],以提高工作效率为目标,研究装配线上以机器为主导的人机配合策略;利用任务规划算法有效控制包括人类和机器人在内的多智能体团队[27];允许自动任务处理技术处理人类与机器人团队之间的交互[28]。此外,还可使用人工智能技术处理人类存在带来的时间差异,并根据一对人类工人和机器人的实际行为,动态调整活跃任务计划[20]。
(2)按人工智能技术整合方式分类。一是基础替代。基础替代是人机协作的最底层,将人工智能技术简单引入任务中替代传统人类劳动方式和基础工具,该过程对人类合作者的影响程度很低,如制造业场所中用机器传送产品、运送包装袋、记录工作日志等基础服务工作。二是提高增强。人工智能与提高增强之间既存在联系又相互排斥,人工智能同时具备取代人类和延伸人类智能的功能,需要机器深度学习[29]。通过引入神经网络对特征进行有效表示,可以实现降低任务复杂性、提高学习速度的效果[30];利用一种基于DRL的多机器人编队控制方法对可观测的高维状态空间信息进行压缩表示也可加快机器学习进度[31];将深度神经网络与Q学习算法相结合,让计算机学习策略性游戏的玩法,其超越专业人类玩家的表现也证明深度强化学习方法具有强大的自主学习能力[32];将专家神经网络应用到基于RL的抓取控制中,通过对输入物体图像的特征学习,使机械爪具有与人类相似的感知与决策能力[33]。三是创新重塑。在智能制造重塑下的现代企业制造环境中,大中型技术装备企业除引进最高端的技术设备外,还需要不断汲取智能趋势下新的企业发展理念,以实现动态创新和自身长远发展。自20世纪80年代以来,学者试图让机器自己执行认知任务,以解决创新的问题,但存在很大争议[34-35]。此后,认知创新理论——模糊特征假说(OFH)强调,所有创新解决方案都至少建立在问题的一个模糊特征之上[36],并在后续发展中基于对象特征的新定义(对象与其它实体之间的交互影响),得出人机伙伴关系可能比任何一个合作伙伴都更具创新性的结论,未来的人机融合发展方向更是将人机协作推到一个前所未有的水平。
总体看,虽然有关人机协作任务规划技术的研究已经取得了一些成果,但大部分学者主要关注人工智能技术的整体发展作为前因变量对社会、企业和个人的影响,对人发展的影响大多只从人机关系的定位方面展述,很少有从学理角度探讨人与人工智能合作时,基于未来需要达到的任务目标,各自应该遵循的水平和准则,即缺少关于人工智能运用到人机合作中的标准理论体系。大多数文献只有定性和描述性的展望,缺少对其运行功能标准的制定,更缺少人机任务系统作为对象、过程及整体的建模。随着人类在系统中参与的灵活性和机器性能的提高,任务活动的复杂性也会增加[37],其中蕴含的人机协作运行功能标准维度之间的关系错综复杂,这就需要一种能处理系统复杂性问题的建模方法,由此本文提出采用OPM构建模型。
2 智能制造人机协作运行功能标准概念界定与量表开发
本文基于《国家智能制造标准体系建设指南》对人机关系需求和智能制造系统涉及内容的界定,结合国际标准化组织[38]发布的协助机器人规范设计访谈提纲,包括智能感知、制造过程中的生产人员、生产设备、原辅材料、制造环境、互联互通、协作、分析与统计、预测与预警、决策支持、控制与执行等因素,对人机关系和人机协作标准进行研究。
2.1 扎根研究
本文认为,智能制造要求的人机协作运行功能标准是指机器和人类各自或共同需要达到的一种足以发展智能化的水平,只有达到这种标准,才能发挥人机协作最大优势,企业才能最大限度提升绩效。本文遵循科学的测量工具开发范式,利用文献分析法、扎根理论法和专家访谈法等获得理论。
2.1.1 资料收集
本文通过访谈的方式收集一手资料,遵循最大差异信息饱和原则,采用理论抽样方法[39],当访谈不再有新的信息产生时,停止访谈。访谈对象主要是正在进行数字化、智能化转型的大中型制造企业管理人员,受访企业5家,受访人数共14人,其中高层、中层和基层管理者分别有5人、5人和4人,男性占72.2%,女性占22.2%。深度访谈历时1个月,获得有效文本资料约13万字。本文通过权威途径收集二手数据,包括企业高层在学术论坛中的演讲、公司网站资料、访谈视频音频、国际权威媒体新闻报道、人工智能发展白皮书等研究报告。二手数据收集历时两个月,计20万字,作为一手资料的三角检验,使研究结果更为全面和准确。
2.1.2 人机协作标准内容结构
资料收集完成后,笔者和两名熟悉该研究主题并有足够能力诠释数据的研究生进行独立编码,通过讨论,解决有问题或冲突的编码,以使差异最小化。在编码过程中,通过与两名专家、1个研究团队、8位研究生交流并收集意见,从多角度得到启发。首先,在初始编码之前,先对口语化的访谈文本资料进行书面化整理,减少无关文字干扰,再对资料逐段、逐句编码,保留表达最鲜活的部分。以人工编码为主,借助质性分析软件Nvivo,将访谈时建立的大致分类想法存到备忘录。第一次信息处理相对随意,主要是提取并涵盖所有有用信息。依据相关性、准确性、典型性原则,剔除不符合人机协作标准内容、表达意思含糊不清、出现频率较低且不具有代表性的编码,合并表达重复的编码。整理后,获得符合主题的初始编码共101个。部分初始编码见表1。
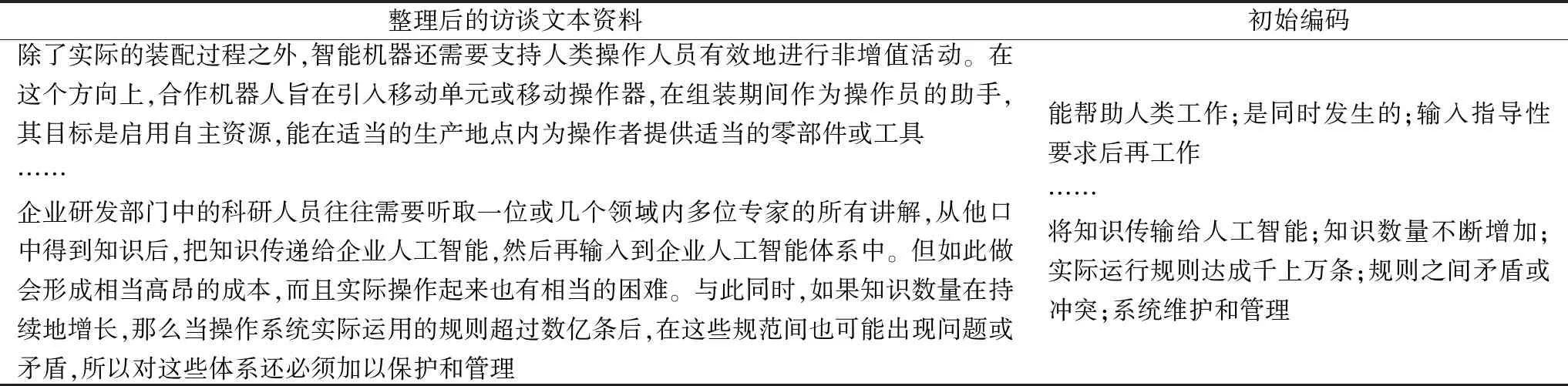
表1 初始编码(部分)Tab.1 Initial code (partial)
聚焦编码是指将访谈文本与研究主题相关联,进行理论整合。对101个初始编码进行综合、分类和区别,对语义关系、过程与结果的关系进行迭代分析,体现出概念之间的相关、类属和同一关系。将初始编码与子范畴相联系,使编码结果不断接近研究主题,101个初始概念共整理为52个子范畴,最终确定52个聚焦编码C1~C52,见表2。
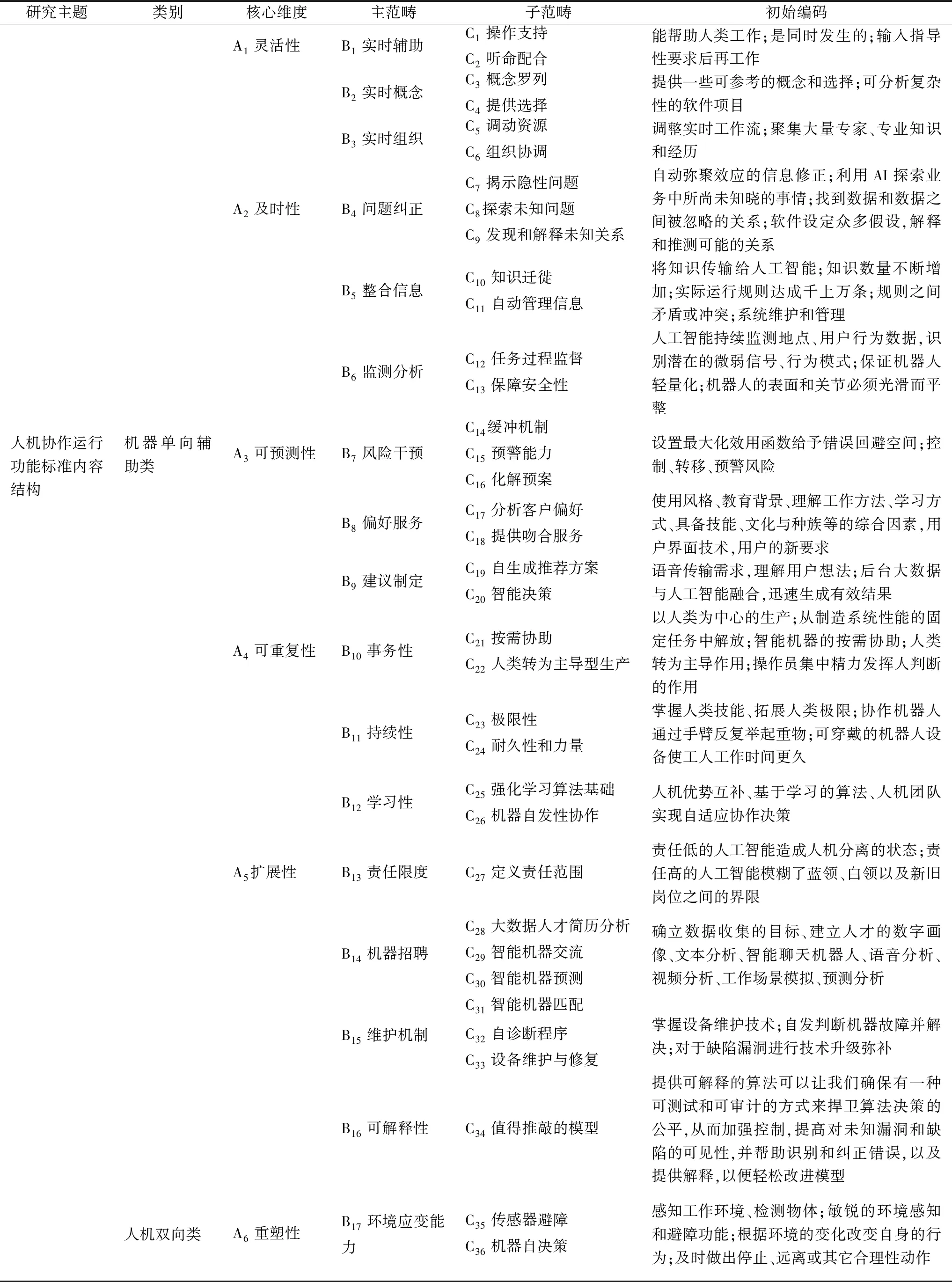
表2 聚焦、轴心与理论编码结果Tab.2 Focus, axis and theoretical coding results
轴心编码是指系统整理子范畴之间的关系,紧扣编码主题和相关研究,进而确定核心范畴的过程。人机协作运行功能标准是指以完成共同任务为目的,人机双方在协作运行过程中所要达到的机器功能标准和人员素质行为标准。这一阶段编码既要契合人机协作的定义,又要突出人机协作区别于一般协作的特征。因此,需要进一步紧扣现有研究成果,提高概念的抽象层次。经过整合与精炼,52个子范畴概括为人机协作运行功能标准的24个主范畴B1~B24。
理论编码是指把支离破碎的线索重新聚拢在一起,使分析型数据变得理论化。对之前的编码与资料进行互动和比较,继续考察和深入分析24个主范畴后发现,维度划分可以按照内容的不同特性进行最终编码。结合人机协作模式和上述24个主范畴,经过专家评议和研究团队审议,认为人机协作运行功能标准可划分为灵活性、及时性、可预测性、可重复性、扩展性、重塑性和多角色性7个维度(A1~A7)。
本研究的总访谈人数为14+2的形式,通过对14位专家访谈确定编码后,再利用两位专家的访谈内容进行饱和度检验,直至未发现新的内容结构。本研究还对已有文献进行梳理,共有47篇涉及智能制造人机协作或人机合作的文献,其中33篇外文文献,14篇中文文献,再综合新闻报道、演讲、研究报告和公司网站资料,经比较,这些资料均可划分在7个维度内,一定程度上可为编码结果的合理性和饱和度提供文献支撑。最后,本研究邀请8位智能制造代表性企业的中高层管理人员,从反映程度和语义表达归类是否合适等方面对量表题项提出建议。讨论认为人机协作中机器的技术部分是决定性的,人在其中的作用有多种情况,其标准需具有整合互补性,最终为提高协作效率服务,因此从机器单向辅助和人机双向协作两方面考虑更能反映智能制造企业人机协作发展现状。最终确定人机任务系统运行功能标准的初始量表,如表3所示。

续表2 聚焦、轴心与理论编码结果Tab.2(Continued) Focus, axis and theoretical coding results
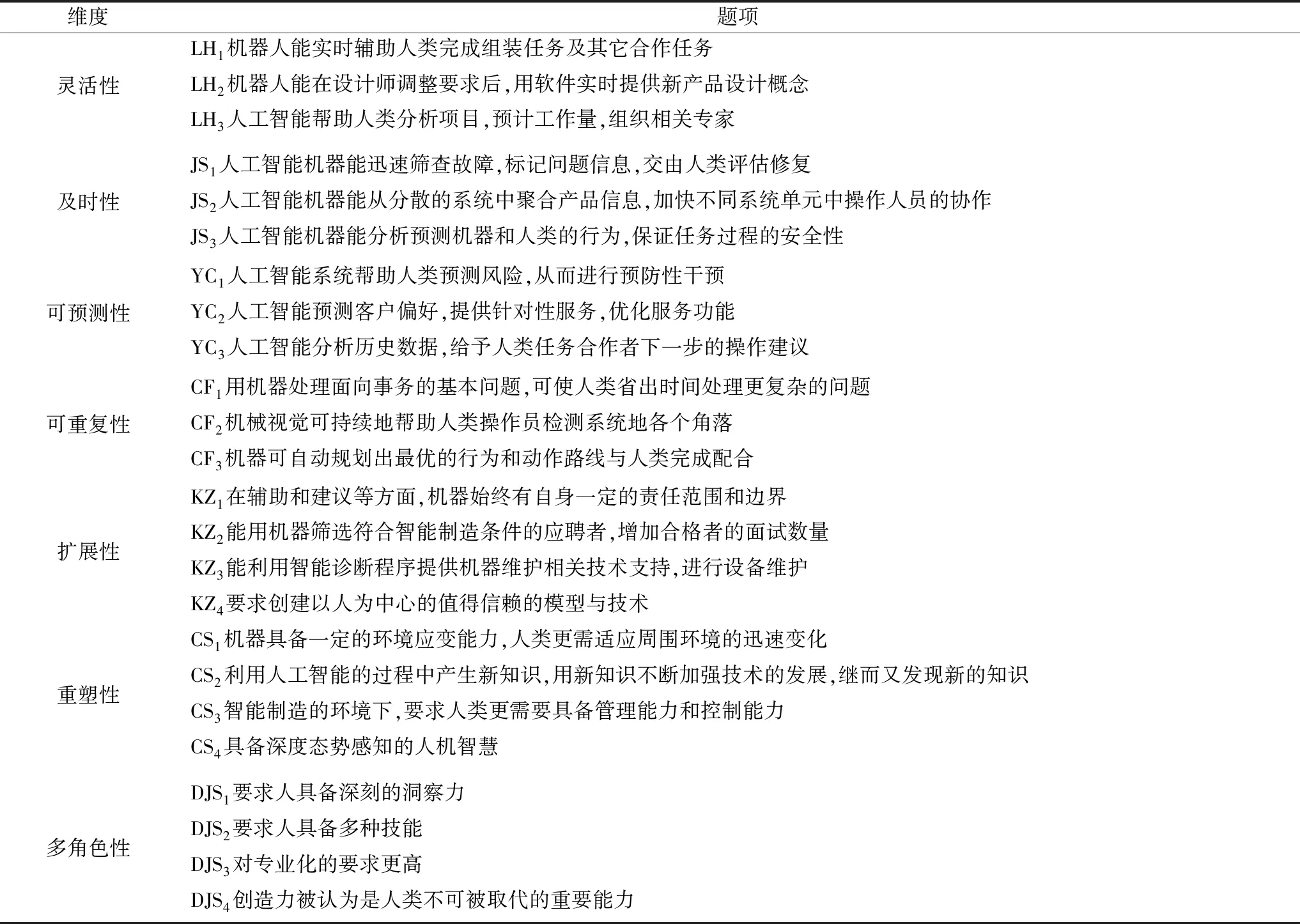
表3 人机协作运行功能标准初始量表题项Tab.3 Items of initial scale of human-computer cooperative operation function standard
2.2 量表预调研
为保证量表质量,需要进行预调研。通过线上和线下相结合的方式收集小样本预调研问卷109份,其中有效问卷102份。信度分析的α系数为 0.931,验证为可靠后,使用单项—总体修正系数或CITC系数进行题项净化,如果某题项的系数小于0.5,则应该删除。从CITC值最小的答卷题项入手,逐步剔除问卷题项并检测新量表的α系数,当剔除JS1、JS2和JS3题项后,新量表的α系数上升至0.932,且各题项的CITC值均大于0.5。经过信度和题项分析,人机任务系统运行功能规范的题项从24个减至21个,及时性被剔除,剩下6个核心维度。
3 量表有效性检验
3.1 数据收集
本研究选择智能制造企业或包括智能制造环节的企业基层、中层、高层管理者作为调查对象,发放大样本问卷。基层管理者熟知人工智能机器操作性部分内容,中高层管理者知晓统筹性战略实施部分内容,不同层级管理人员对人机协作标准有不同看法,因此三者皆需涵盖。2021年9月—10月,通过邮件、微信、QQ以及线下熟人推荐填写等渠道发放问卷,剔除同一选项过多、漏填、选项前后信息矛盾的样本,得到有效问卷共369份。
3.2 样本特征
主要在安徽、陕西、山西、北京、广东等地进行数据收集,共回收问卷397份,其中有效样本369份,回收率为79.4%。样本特征为:男性55%,女性45%;年龄范围18~45岁,26~35岁占比最多,占45.3%;学历方面,博士占3%,硕士占32%,本科占49.9%,其它占15.2%;企业所属领域中,包括电子(18.2%)、医药(13.3%)、机械(11.9%)、化工(11.7%)、纺织(8.1%)、食品(7.6%)、材料(6%)、仪器(6%)、印染(2.4%)、其它(14.9%);公司成立时间在10年以上占50.4%,3~10年占36.6%,3年以内占13%;企业规模方面,100人以内占14.6%,101~500人占46.9%,2000人以上占10.8%;高层管理者占6.2%,中层管理者占53.1%,基层管理者占40.7%。
3.3 数据分析
3.3.1 探索性因子分析
人机协作运行功能标准量表因子分析旋转矩阵如表4所示。21个题项的KMO值为0.91,Bartlett's球形检验值显著,总解释能力达到74.681%,共同度均大于0.5,各测量题项的因素负荷量均大于0.5,且交叉载荷均小于0.4,每个题项均落到对应的因素中,表明量表具有较高的结构效度。
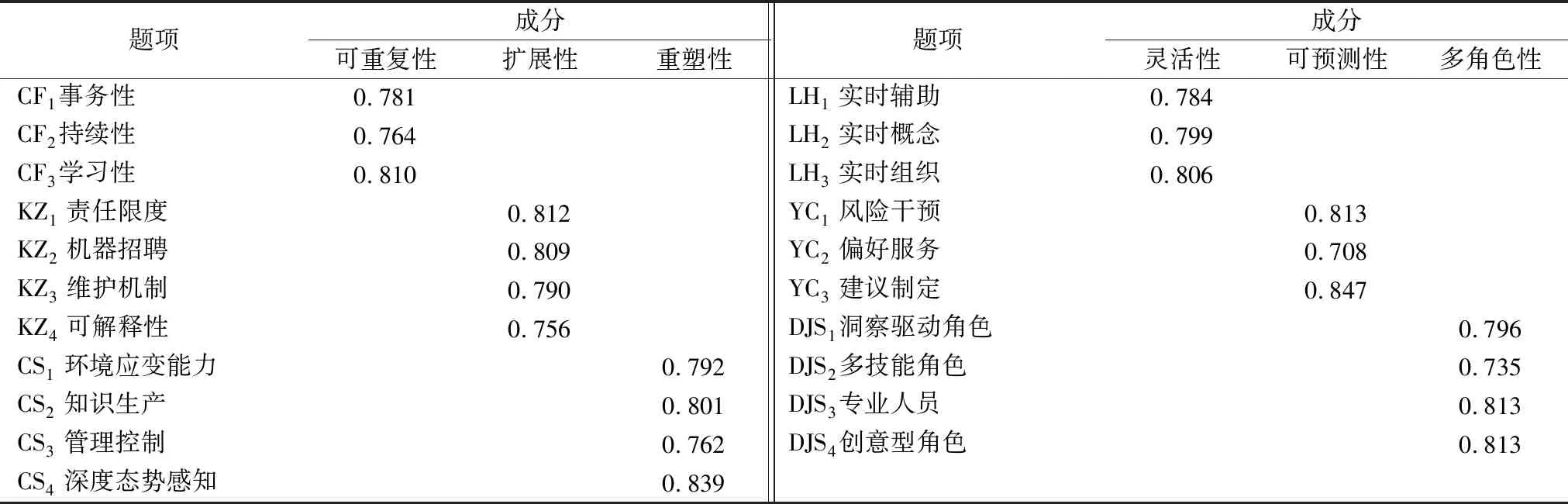
表4 人机协作运行功能标准量表因子分析旋转矩阵Tab.4 Factor analysis rotation matrix of human-computer cooperative operation function standard scale
3.3.2 验证性因子分析
在探索性因子检验中,共包含21个测量题目,利用Amos26.0执行验证性因素分析后,结果如图1、表5所示。结果显示,CMIN/DF为1.261,符合标准,GFI、AGFI、NFI、TLI、IFI、CFI均大于0.9的标准值,RMR为0.042,小于0.08,RMSEA为0.027,小于0.08。所有模型拟合指数都满足一般研究准则,由此可以认为模型具有较高的配适度。
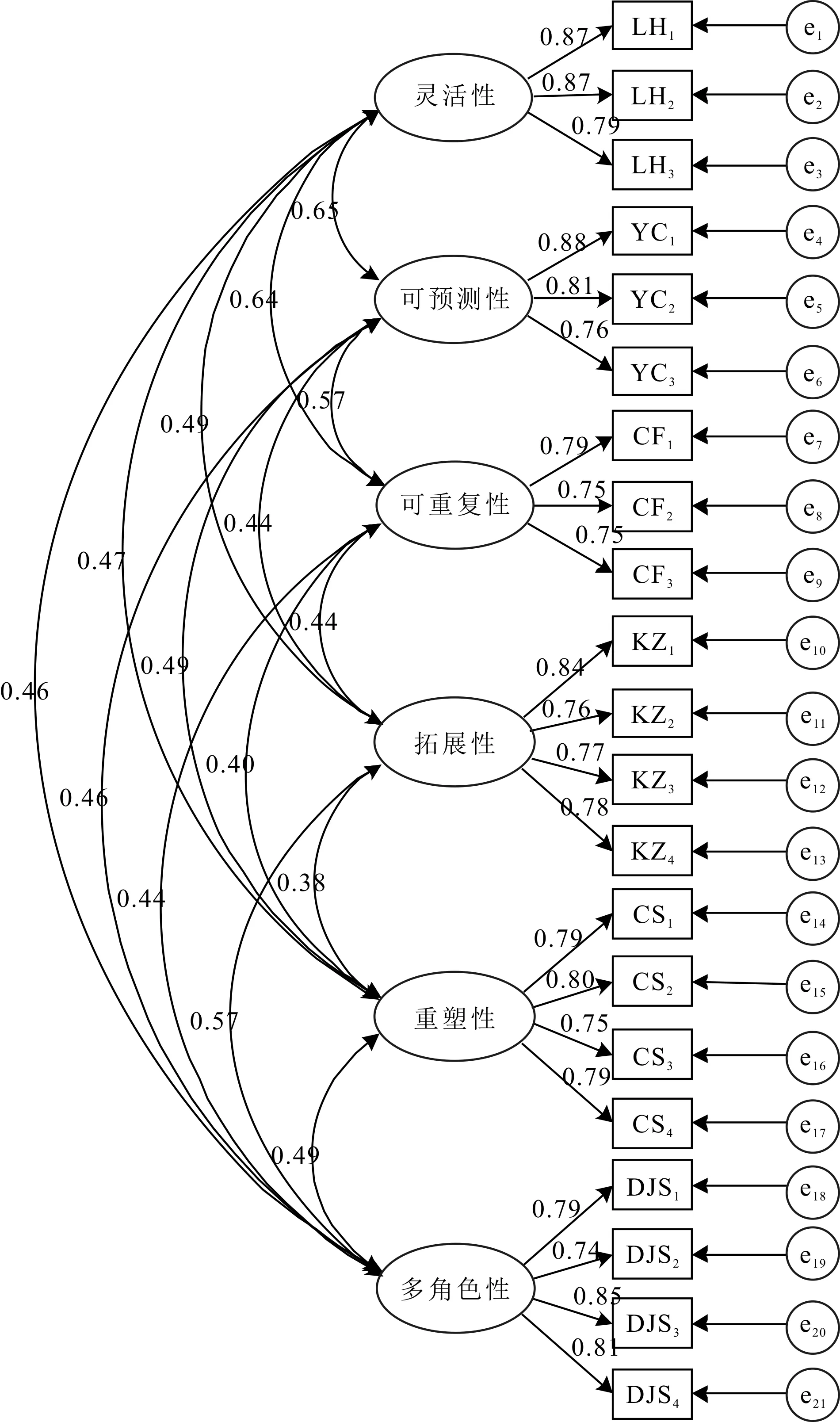
图1 智能制造人机协作运行功能量表验证性因子分析模型Fig.1 Confirmatory factor analysis model of human-computer cooperative operation function scale for intelligent manufacturing
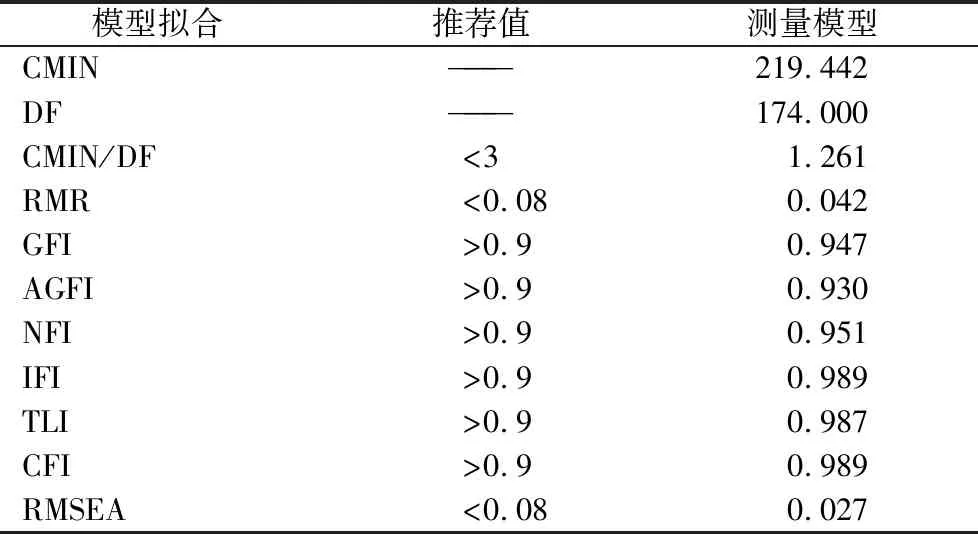
表5 模型拟合结果Tab.5 Model fitting results
3.3.3 信效度检验
量表的α系数为0.919,灵活性、可预测性、可重复性、扩展性、重塑性、多角色性6个维度的α信度系数分别为 0.88、0.855、0.81、0.865、0.864、0.874,不需要删减任何题项。表明测试量表具备较高的内容一致性,可以认为该测试量表稳定可信。所有测量指标的标准化因素负荷均大于0.6,平均值组成的可信度系数(CR)均大于0.7,平均值变化萃取量(AVE)均大于0.5,说明所有变量都具有较高的收敛效度。
如表6所示,各因素的AVE开根号都大于除可对角化外的所有标准化相关系数,对角线数值大于该列的其它数值,表明不同构面之间的关联度不高;对角线数值大于横向排列的其它数值,说明构面之间的关联度较高。据此可断定本研究变量之间具备较高的区别效度。

表6 区别效度检验结果Tab.6 Test results of discriminant validity
3.4 人机任务系统运行功能标准模型确定
结合访谈文本资料和文献分析,通过分析预试问卷和正式问卷数据,得到人机任务系统运行功能标准模型的6个主要运行功能标准,分别为灵活性、可预测性、可重复性、扩展性、重塑性、多角色性,如图2所示。
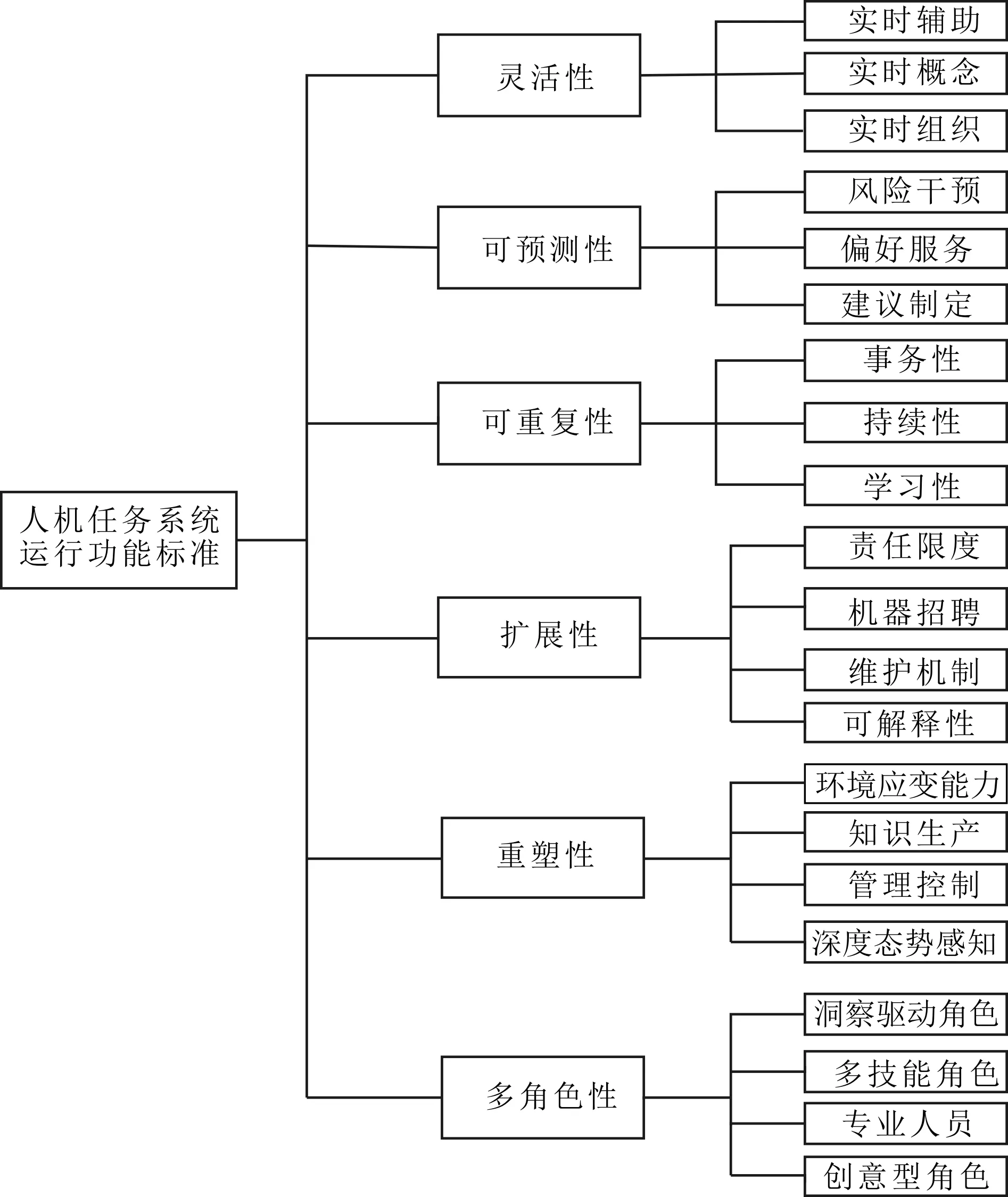
图2 人机任务系统运行功能标准模型Fig.2 Standard model of operation function of man-machine task system
4 智能制造人机协作运行功能标准的OPM模型
人机协作运行功能标准概念模型涉及6个维度和对应的21个主范畴,因协作标准的特殊性,范畴间的关系无论在理论上还是应用中都应相互关联,而不是独立的,因而不同范畴间的关系还需进一步解释。软件系统环境处于不断变化中,OPM的一个重要特性是能在概念模型中找到静态结构与动态行为表达之间的合理平衡点,动态行为能详细描述软件系统运作过程与功能实现的机制,对静态结构进行合理补偿。本文对人机协作运行功能标准概念进行延伸和补充。智能制造人机协作运行功能是企业对员工与机器之间完成共同任务目标的具体行为,也可看作一个动态过程行为。虽然智能制造企业中不同任务单元实现人机协作的具体方式存在差别,但总体遵循“下达命令—整合信息—执行任务”的关联机制,本文构建如图3所示人机协作运行功能标准模型。OPM的高度可执行性意味着模型的动态行为实时可测、可视,且通过恰当的设计能在软件系统环境中进行运行模式的推演。其推演功能与用计算机语言编程过程中的调试器比较相近,都是从软件流程中检测系统的动态行为,从而发现错误。本文基于同一视图建立人机协作运行功能系统整体结构模型和行为模型,使用的对象过程方法中包含的链接关系有激活链接、条件链接、过程链接、结构链接、变换链接、支持链接、手段链接等几大类,每一类链接还可根据需要继续细分。
模型图中对象过程语言名词之间的链接词由OPCAT自动生成,用于说明模型中描述人机协作场景过程、场景活动功能、场景执行流程、重复实施和完成任务的要求[40]。根据OPM的时间轴基本原理,整个流程次序一般默认由过程椭圆的顶端至其底面依次进行,除非有特定指示。演示观察时按照语义强度理解过程,例如在变换链和支持连接过程中,可以按连接的优先级顺序进行,即消耗=结果>影响>主体>手段。其中,指定状态的基础连接比没有指定状态的基础连接具有更大的优先权。模型主要描述如下:首先,以共享任务和整合信息两个主要过程为依托,面对人类和机器两个对象,通过虚拟仿真界面进行人机交互合作过程。其中,达到学习性过程标准可以使机器状态从未学习变为已学习,表示链接为特定状态的变换事件链接;事务性和持续性标准的执行主体是机器,表示链接为特定状态的支持事件链接。其次,虚拟仿真界面、管理控制、环境应变能力和多角色性标准均需要人机交互合作过程。知识生产触发人机交互合作,人机交互合作影响深度态势感知,经过人机交互合作,人类状态从未分配变为已分配。重塑性标准会影响知识生产,并产生深度态势感知、管理控制、环境应变能力3个标准。最后,实时概念具有实时辅助和建议制定的属性,责任边界是实时辅助和建议制定的条件。扩展性是环境的,在有定制化、维护机制、责任边界和机器招聘的情况下,可以认为系统满足扩展性。整合信息过程中包括实时概念、实时组织、偏好服务等子过程,问题纠正和监测分析作为系统子过程的补充部分。风险干预的主体是人类。其余部分根据OPL语句对照OPD图可以自然推断各部分的内容表达。
对人机任务系统运行功能标准进行OPM建模,在建模过程中完成方案分析。确定人机任务系统运行功能统一规范的运行方案,对选定的行动方案进行分析和推演。利用OPCAT软件的演示选项,对图3所示的对象过程图(OPD)进行从上到下、从左到右的自动演示运行。人机任务系统运行功能统一规范建模是任务推演的指导基础,任务推演的主要目的是验证既定方案能否达成预期目标,或设想行动是否与实际情况相符。在领会上级命令和充分获得工作任务信息后,通过任务编辑设定行动步骤:①判断如何最大化发挥人机配合效能,同时降低操作风险和提高人体工程友好度;②预判真实工作环境中出现的各类情况和潜在应对措施;③判断在何时、何处投入任务行动力量和资源;④判断要达成行动目标和预期终止状态所需的力量和资源;⑤针对性信息收集、处理和分析需求;⑥判断行动方案的灵活性和容错性。企业通过运用该人机任务系统的OFUS,能够使管理者和团队更好地理解行动方案和方案中可能出现的问题。
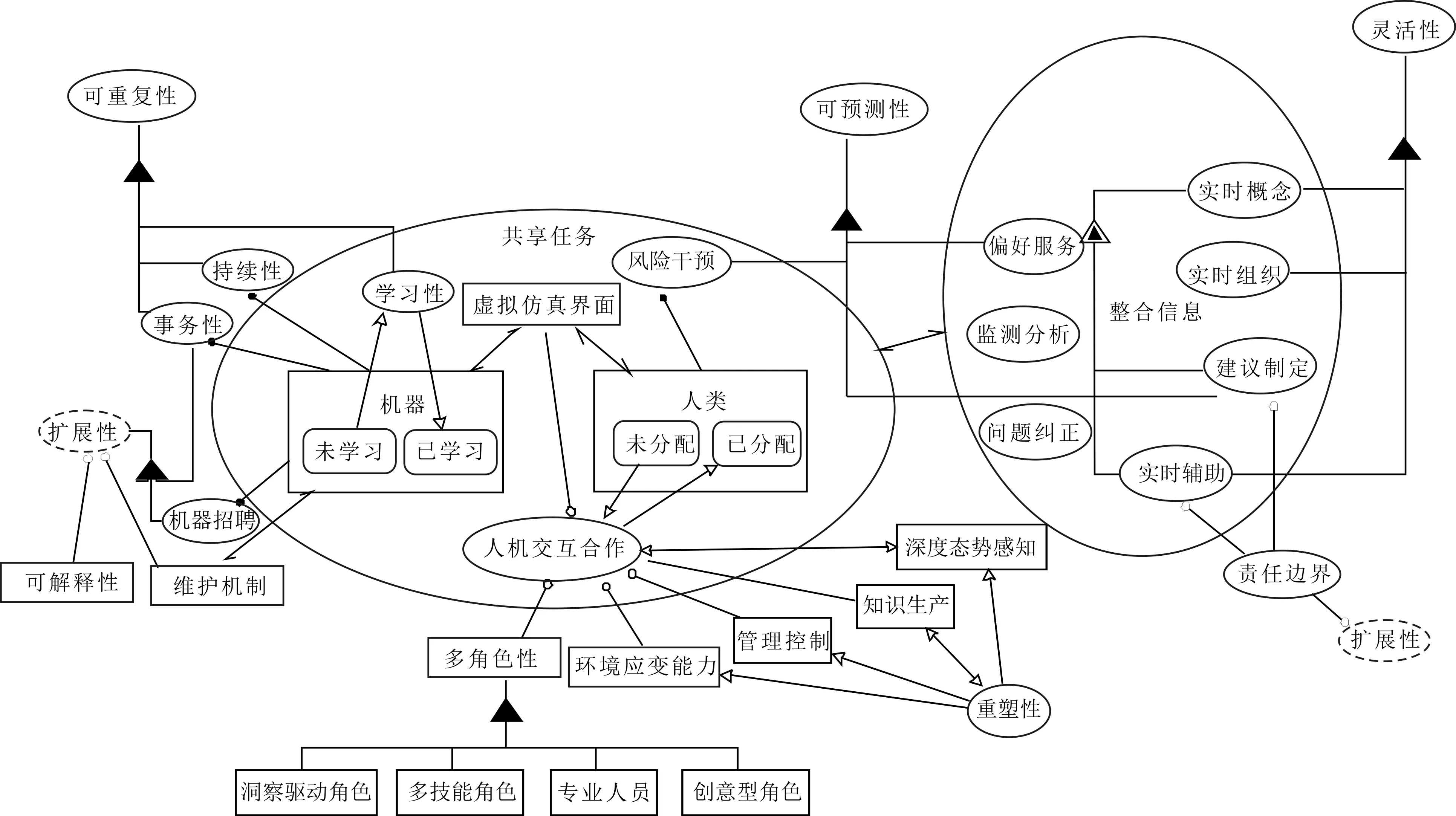
图3 人机协作运行功能标准模型Fig.3 Model of man-machine cooperative operation function standard
5 结语
5.1 研究结论
本研究首先通过扎根研究对获取的访谈和文献资料进行分析,发现智能制造下的人机协作运行功能标准大体包括7个方面,分别是灵活性、及时性、可预测性、可重复性、扩展性、重塑性和多角色性。其次,基于人机协作运行功能标准的内容结构,即分别以单向辅助和双向合作为核心,基于灵活性、及时性、可预测性等7个核心维度,形成24个题项的人机协作运行功能标准初始测量量表,经过预调研和正式调研,对量表进行修正和验证,剔除及时性维度,最终开发形成包括6个核心维度21个题项在内的正式量表,可为后续相关研究提供可靠的测量工具。最后,依据得到的人机协作运行功能标准概念模型,提出基于对象过程方法论的人机协作标准建模方法,该方法可以将静态和动态模型统一起来,根据几个副范畴之间的基本组成逻辑,提出可进行动态推演的整体概念模型,提供一种实现人机协作标准“设计—推演—优化”全过程的可行思路。
5.2 理论贡献
当前学界对人机协作标准的研究主要集中在人机任务规划技术的发展和人工智能技术的单方面改进,而对于按照何种标准进行人机协作则关注较少,更缺乏对二者协同进行管理创新的探索。智能制造的人机关系是一个动态变化过程,随着政策和技术的改变,其管理理论也会发生变化。首先,本研究基于国家智能制造政策和企业智能化转型需求,探索新要求下的智能制造人机协作运行功能标准,不仅弥补了现有人机协作管理理论的不足,还结合定性与定量分析,更加全面地发掘人机关系中的隐含内容,拓展人机协作理论的新视角。其次,本文突破了以静态为主的框架模型范式,将人机协作之间的范畴关系可视化,依照概念之间的语义关系在对象过程方法中进行合理表达,从而更好地把握维度与细分范畴之间的逻辑关系,从系统性、整体性方面丰富智能制造人机系统理论。利用该方法探索智能制造个性化的新管理模式,为人机协作管理理论提供新颖的思考方向和研究工具。
5.3 实践启示
通过对智能制造人机协作工作标准内容的探究,对于人机协作关系重构后的企业人力资源管理具有以下启示:首先,管理者要关注管理模式升级,从而对经营系统有更高层面、更透彻的理解,并针对岗位要求提升相应管理技能,具备超越计算机的整体把握能力和大局思维,储备高水平的计算机技能与相关知识。其次,员工需要了解计算机系统的程序化决定步骤,要具备监控与调度计算机功能的先进技术能力,以现场操作管理人员的身份参与到由人工智能实现的作业流程中。最后,企业评估任务并预留计算机和算法程序尚未渗透领域覆盖的任务或岗位,设置专门标准,招聘符合条件的相应人员。
此外,本文研究结果还对未来人机协作标准建模具有重要借鉴意义,其模型也可应用到实际的制造企业管理案例中,为智能制造下的人机研究提供新思路,未来也可以采用其它研究方法进一步验证该模型。
猜你喜欢
青少年科技博览(中学版)(2022年6期)2022-08-31 09:04:00
四川轻化工大学学报(自然科学版)(2021年1期)2021-06-09 06:12:12
南都周刊(2021年3期)2021-04-22 16:43:49
汉字汉语研究(2020年2期)2020-08-13 07:52:48
电子制作(2019年22期)2020-01-14 03:16:24
作文成功之路·小学版(2019年8期)2019-09-18 01:12:04
疯狂英语·新读写(2018年3期)2018-11-29 22:37:11
读者(2017年14期)2017-06-27 12:27:06
海外星云(2016年7期)2016-12-01 04:17:50
太空探索(2016年5期)2016-07-12 15:17:58