
面向室内养殖场的机器人自主导航技术研究进展
2022-10-21 04:39郭晓耿莫冬炎朱立学张世昂杨尘宇
农业工程 2022年7期
郭晓耿, 莫冬炎, 朱立学, 张世昂, 杨尘宇
(1. 仲恺农业工程学院机电工程学院,广东 广州 510225; 2. 仲恺农业工程学院自动化学院,广东 广州 510225)
0 引言
机器人已被公认为农业领域最具潜力的新兴技术之一[1]。农业机械自动化被认为是提高农业生产效率和质量的最有效途径,其中,应用于农业生产的机器人在提高劳动生产率、改善生产作业环境、缓解劳动力不足现状,实现农业的智能化、精准化生产模式等方面具有极大的应用前景[2]。
随着工业化进程的加快,养殖业也开始朝规模化、标准化、集约化、智能化不断迈进,机器人在实现农业的可持续发展与室内智能化养殖方面发挥着越来越显著的作用[3]。机器人是一种集成传感器、通讯交互、图像识别等技术于一体的智能装备,其中农业作业环境中机器人的定位和导航一直是人们关注的焦点,自主导航技术是机器人实现各种自主作业功能最基础也是最重要的技术[4-5]。
机器人在室内养殖场实现自主作业,可靠的导航系统是实现机器人自动化作业的基本保证。为实现自主导航,机器人需要搭载各种传感器,通过传感器感知、获取复杂的环境信息以便后续分析处理。根据环境感知技术的种类,导航技术有激光雷达导航、视觉导航、机械导航、电磁导航、超声波导航、卫星导航等分类,通过上述环境感知技术获取信息,处理后传输到机器人的行走控制器,实现自主导航与避障[6-7]。
在综述室内外机器人导航技术的基础上,本文主要分析常用视觉导航技术、激光导航技术、卫星导航技术、路标导航技术和多种传感器信息融合的导航技术在机器人导航作业时的导航精度、实时性、适应性,分析各种导航技术在农业领域应用的优缺点,结合在梅州市金绿现代农业发展有限公司室内养殖场和学校的实验室进行机器人导航技术试验结果,指出常用导航技术在室内养殖场应用过程中存在的问题,并展望室内养殖场机器人导航技术的发展前景。
1 视觉导航技术
视觉导航技术最初在美国和英国开始研究,随后得到迅速应用;我国的视觉导航技术研究始于20 世纪90年代,已引起农业研究者的广泛参与。随着计算机算力的大幅度提升,视觉导航技术得到了快速发展,为机器人提供了可靠的导航支持[8]。
视觉导航具有语义信息丰富、探测范围广、成本低等优点,主要使用计算设备来模拟人的视觉功能,从获取图像中提取相应特征,检测出导航路径线,为机器人在室内与室外作业环境中的行走提供导航路径[9]。
机器人视觉导航分为作业环境分析、图像采集与处理、提取导航路径、获取导航基准线等环节,其中,导航路径与导航线的提取最关键,决定了机器人的导航精度和速度[10]。提取出导航路径之后,导航基准线的问题才可以得到快速解决。提取导航路径方法主要分为传统图像处理方法与神经网络路径特征处理方法。
1.1 基于传统图像处理的导航路径
视觉导航通过相机感知作业环境,提取图像的特征信息,结合横向偏差或者航向偏差等做出导航决策。基于传统图像处理的导航路径提取方法首先对采集的图像进行图像滤波、灰度化处理、阈值分割,感兴趣区域的提取,最终通过查找相应的边缘点计算出导航线,如图1 所示。

图1 基于传统图像处理的导航路径提取流程Fig. 1 General process of navigation path extraction based on traditional image processing
杨洋等[11]研究了玉米行可行走动态感兴趣区域导航线实时提取的方法,在动态目标区域内采用最小二乘法获取玉米行间导航线,提取准确率为96%。
李军锋等[12]采用一种混合阈值和偏移行中线的路径识别方法划分作物行,识别准确率达98%。
宫金良等[13]提出一种基于边缘检测和区域定位的玉米根茎导航线提取方法,利用两侧边缘判断出准确的根茎特征点,采用最小二乘法拟合得到玉米大田作业导航线,该方法特征点的拟合准确率为92%。
关卓怀等[14]对获取的图像分割处理,然后水平扫描,采用多段三次B 样条曲线拟合法提取水稻待收获区域边界线,试验表明,中粳798 与临稻20 采收时的作物线识别平均距离误差分别为3.97、4.50 cm。
聂森等[15]提出一种基于HSV 色彩模型和最大类间方差法增强果园果树树行特征,最终以获得相邻两树行的中线作为导航路径的方法,能有效克服行间生草、光照阴影等。
李亮等[16]采用面积去噪、水平投影方法等特征点提取方法,根据特征点间的关系形成左右两列点簇,通过最小二乘法查找左右两条交界线和各行中心点生成临时行走的导航路径。
RADCLIFFE J 等[17]以果园的树冠和天空为基底,将树冠背景中的天空分割出来,并将分割对象的质心特征作为一个过程变量,进而引导机器人通过树冠行,该算法对树形、种植方式和传感器视野要求较高。
MA Y 等[18]在枸杞自动采收中提出了一种改进的彩色通道权值方法,将彩色图像转换为灰度图像,利用最小正外切矩形寻找轮廓,通过最小二乘法对轮廓点进行导航线拟合,计算出可变斜率ROI 来动态跟踪导航线,结果表明,当速度为1 km/h 时,最大横向偏差小于6.2 cm,平均横向偏差为2.9 cm。
CHEN J 等[19]提出的中值点Hough 变换算法能够准确提取导航路径,最大航行路径偏差小于0.5°,与传统的Hough 变换相比,导航路径拟合的平均时间为7.13 ms,在时间和精度方面都取得较好的效果。
基于传统图像处理的导航路径提取结果对比如表1所示。
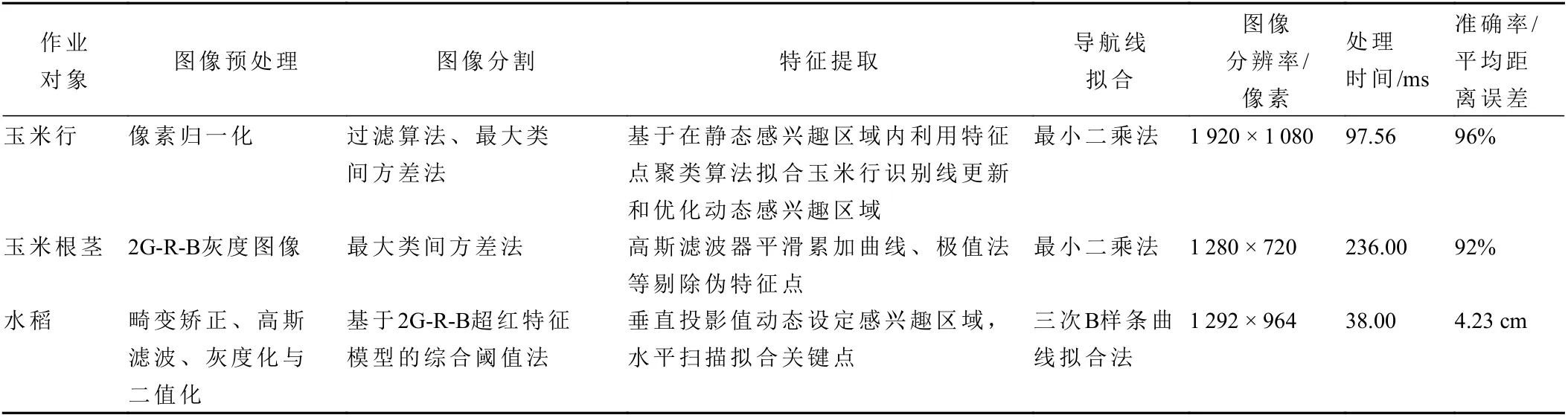
表1 基于传统图像处理的导航路径提取结果对比Tab. 1 Comparison of navigation path extraction results based on traditional image processing
参考上述文献传统图像处理方法,在梅州市金绿现代农业发展有限公司室内鸽子养殖场进行了导航路径提取与导航线拟合。利用搭载机器人的深度相机获取图像数据,采用高斯模糊图像预处理方法进行自适应阈值分割,采取扫描法剔除边缘的伪特征点,确定可行走路径的边缘点,利用最小二乘法拟合左右边缘——导航路径边界,由左右边缘点得到导航路径的导航中心点。试验结果表明,采用传统图像处理提取导航线的方法可为机器人在室内养殖场作业提供一定的导航参考。试验中导航路径提取的效果如图2 所示。
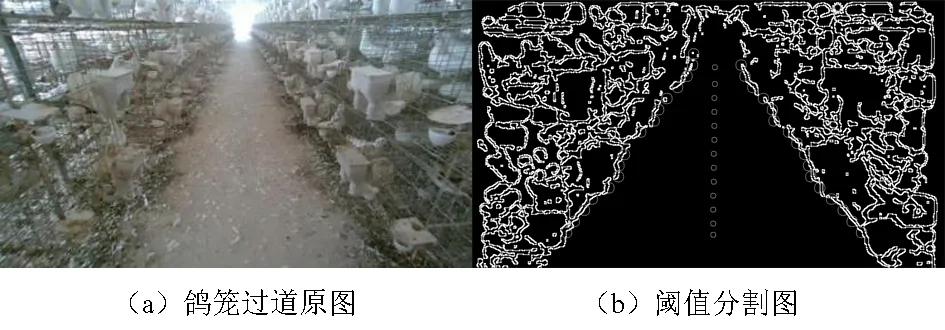
图2 传统图像处理的导航路径提取Fig. 2 Navigation path extraction of traditional image processing
在传统图像处理的导航路径过程中,大多数学者结合颜色特征分割图像中的作物或垄沟,再通过最小二乘法、三次B 样条采样、Hough 变换等提取出机器人可行走的导航线,传统图像处理方法提取导航线实时性好,可实现机器人在室内养殖场自主导航。
1.2 基于神经网络的导航路径
近年来,神经网络在农业领域的应用日益广泛,神经网络方法具有检测精度高、适应性强的特点。
韩振浩等[20]提出了一种基于U-Net 网络的果园视觉导航路径识别方法(图3),在果园道路图像分割的基础上进行基于扫描法的边缘信息提取和基于B 样条曲线拟合的导航路径识别,试验表明在果园道路宽度约为3.1 m 时,平均距离误差为4.4 cm。

图3 基于U-Net 网络果园导航路径预测结果与边缘提取Fig. 3 Prediction results and edge extraction of orchard navigation path based on U-Net network
王毅等[21]采用基于YOLOV3 卷积神经网络识别果园道路两旁果树的树干,然后利用获得的树干位置方框信息提取出树干方框对角点的坐标,进而求得树干与地面的交点,最后用公式表示出导航线,试验结果表明,平均偏差距离为3.3 cm。
杨洋等[22]研究了玉米根茎精确识别与定位方法,通过图片预处理训练网络模型,得到目标检测器并识别出根茎位置后,可以得到边界框内的定点,即路径基准点,采用三次样条插值的方法来获得两侧的玉米根茎导航基准线,最后进行最小二乘法拟合出导航路径。
马驰等[23]提出基于深度学习的目标检测框底边中点替代果树根点的导航特征目标检测方法,利用Faster R-CNN 目标检测模型能有效识别猕猴桃树干,并可获取定位基准点坐标,通过三次样条插值法提取两侧树干线,再利用最小二乘法拟合最终的行间导航中线,试验结果表明,生成的导航线实际平均横向偏差为5.2 cm。
LIN Y K 等[24]采用一种ENet 语义分割网络模型识别茶园轮廓,可为自动采茶提供实时导航方案。
朱逸航等[25]提出了一种基于U-Net 的棉花垄间道路识别的方法,在复杂作业环境中,其识别道路精度高,能为机器人在其他作业环境的导航提供参考。
吴伟斌等[26]利用MS-PSPNet 网络模型识别果、茶园道路,该方法具有较好的识别率和适应性。
饶秀勤等[27]提出了基于Fast-Unet 模型的棉花、玉米、甘蔗导航路径识别方法,利用Canny 边缘检测,从网络模型识别的导航路径中提取出导航路径中心线,试验表明,该方法适应导航的实时性要求。
表2 汇总了几种神经网络导航路径提取方法的性能。基于神经网络的导航技术处理图像具有高效性和准确性,可在复杂作业环境中实现自主导航,并且导航精度高、实时性好。这种方法需要较大的数据量,最大缺点在于环境改变后需要重新学习,这在环境信息不完整或环境经常改变情况下难以应用,其适应性较差。

表2 神经网络处理的导航路径提取方法Tab. 2 Navigation path extraction method based on neural network processing
基于图像处理和神经网络的视觉导航技术在作业环境复杂多变、非结构化室外的应用较为常见,尤其在果园中广泛应用,但在室内养殖场的应用较少,大多数采用固定轨道的饲养方式和主要应用在大型牲畜的饲养中,其应用较少的主要原因有自动化养殖的研究基础薄弱,规模化、集约化的养殖场正处于起步阶段,整机可靠性和智能化水平不高,导致室内养殖场的前期硬件投入大与效益不高,成本回收期长,并且室内养殖场容易受到养殖牲畜的粪便、毛发等废弃物影响,行走路径难以区分、导航线不易提取[28]。
2 其他导航技术
2.1 激光导航技术
激光扫描具有探测距离远、实时性高、受光照等外界环境因素影响小等优点,能以较高频率提供大量准确的距离信息。近年来,在果园环境中,利用该导航技术成功实现了周围环境感知和移动机器人的精准定位。
刘沛等[29]使用激光扫描仪实时采集果树位置信息,用最小二乘法拟合导航路径,试验中拖拉机以0.27 m/s的速度直线行走30 m,其最大横向偏差0.15 m。
倪江楠[30]利用激光测距仪实现水稻田块的路径、障碍物等信息提取,检测出边缘特征,生成导航路径。
陈军等[31]使用激光扫描仪提取果园的障碍物信息特征数据,利用二次曲线拟合法拟合数据,机器人以0.54 m/s 的速度在正弦函数曲线路径行走,行走平均横向偏差与最大横向偏差分别为0.12 和0.40 m。
薛金林等[32]提出了采用激光雷达获取树行信息的路径导航方法,机器人初始速度为0.2 m/s,在路面较好的冬青树行与在路面较差的梨树行进行导航行走时,最大横向偏差分别为17.5 和28.0 cm。
ZHANG Shuo 等[33]在二维激光和果园干扰点的先验知识的基础上,利用最小二乘法和几何线性拟合出精度更高的目标导航路径。
侯加林等[34]研究一种双激光雷达的机器人导航方法,在温室环境中以不同速度运行时,实际导航路径与目标路径的横向平均偏差小于13 cm。
以梅州市金绿现代农业发展有限公司室内鸽子养殖场和仲恺农业工程学院英东楼208 实验室作为试验场地,机器人搭载2D 激光雷达,分别在养殖场和实验室内扫描建图,采用遥控的方式重复扫描笼间道路和实验室的环境信息。试验结果表明,利用激光雷达扫描稀疏的鸽笼道路周围信息,其特征点不明显,笼间的道路特征匹配不成功,无法实现建立室内养殖场地图,结果如图4a 所示;而实验室环境以紧密结构的实验台分开的两排过道和四周为墙壁,其扫描特征点明显,可建立该实验室的地图,结果如图4b 所示。因此,激光扫描匹配技术虽然能够提供高精度、实时的位置、航向定位结果,但是遇到环境特征稀疏的情况,其定位精度便大幅度下降,容易受到外界环境的干扰。
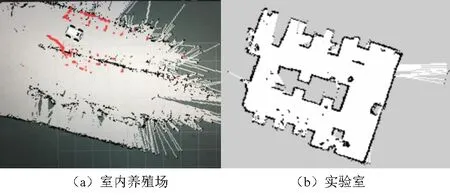
图4 鸽子室内养殖场和实验室激光雷达扫描结果Fig. 4 Lidar scanning results of pigeon indoor breeding farm and laboratory
2.2 卫星导航技术
卫星导航是机器人利用全球定位系统(global positioning system,GPS),通过其自身安装的卫星信号接收装置接收4 颗卫星发出的信号,进行伪距离测量,最终获得相应的坐标信息,将得到的坐标传输给相应的行走控制器实现机器人的基本行走功能。
罗锡文等[35]在国内较早研究了RTK-GPS(real time kinematic global positioning system)导航控制系统,以东方红X-804 型拖拉机为基础,开发出基于RTK-DGPS(real time kinematics differential global positioning system)的自动导航控制系统,在行进速度为0.8 m/s 时,直线跟踪的最大误差<0.15 m,平均跟踪误差<0.03 m。
熊斌等[36]提出一种基于北斗卫星导航系统的果园施药机自动导航控制系统,在行进速度为2 km/h 时,直线跟踪最大误差≤0.13 m,平均跟踪误差≤0.03 m。
郭成洋等[37]设计了一种基于载波相位实时动态差分北斗卫星定位系统(real time kinematic-BeiDou navigation satellite system,RTK-BDS)的自动导航控制系统,当车辆前进速度为0.5 m/s 时,最大横向误差≤0.086 m,平均误差≤0.036 m。
张智刚等[38]以RTK-DGPS 为主要导航方式和数据滤波算法,进行插秧机直线导航田间作业试验,当行进速度0.6 m/s 时,直线跟踪最大误差和平均误差分别小于0.17 和0.02 m。
卫星导航具有全方位、多层次、宽领域的应用,在大田上的农机依靠卫星导航可以达到比较高的导航精度,然而,在室内养殖大棚、茂密的果林等环境中卫星导航存在固有缺点,GPS 信号在遇到建筑物或其他障碍物阻挡时,信号强度被削弱,导致定位不准确或系统功能瘫痪。如图5 所示,在室内养殖场中没有GPS 信号,无法提供准确的坐标。

图5 养殖场GPS 信号测试Fig. 5 Farm GPS signal test
2.3 路标导航技术
郑睿等[39]通过MR 二维码实现机器人的目标识别与定位,识别时间为45~55 ms。霍亮等[40]设计了一种快速识别路标方法,其平均识别时间为9.8 ms。周伟[41]利用QR 码(quick response code)在室内环境中实现机器人的姿态校正与定位导航功能。李奎[42]利用二维码地标构建栅格化地图,实现了机器人直线行走与转弯的功能。二维码具有制作简单、存储信息丰富等特点,该技术适于构建栅格化地图,以便定位机器人,校正机器人的姿态,也可应用于地头区域,借助其他传感器技术,实现平稳的地头转弯。
3 多种导航方式信息融合的导航技术
在机器人导航研究中,多传感器融合技术是指利用多个传感器共同工作,对多种传感器数据进行处理和优化,得到更加精准稳定的导航能力。
严小意等[43]提出了一种激光雷达和惯性测量单元相融合的导航定位系统,通过激光雷达提取环境特征和构建地图,利用惯性测量单元补偿误差。
安亮等[44]采用基于惯性测量单元和GPS 构成的组合导航系统,不仅结合了GPS 的定位精度高和误差无积累的特点,还结合了惯性导航的自主性和实时性的优点,增强了可靠性,精度也得到提高。
钟银等[45]设计了基于全球导航卫星系统和惯性导航系统的智能农机组合导航系统,融合全球导航卫星系统数据,并进行卡尔曼滤波,该组合导航系统优于单独GNSS 系统产生的定位定向结果。
王勇等[46]提出了一种超宽带与陀螺仪组合的导航定位技术,在温室环境中进行机器人的行走试验表明,直线行走距离偏差<6 cm。
多种传感器获取外界环境信息,并进行数据信息相互融合,可消除信息间的冗余度,克服单一信息的不完整性,使得农业机器人导航能够更加的准确与科学。未来在农业机器人导航中,多种导航方式信息融合将发挥重要的作用。
4 结束语
阐述了视觉导航技术、激光导航技术、卫星导航技术、路标导航技术、组合导航技术在各自场景的应用情况,并以梅州市金绿现代农业发展有限公司的室内养殖场为试验平台,初步探索视觉导航、激光雷达导航、卫星导航在室内养殖场的应用。
基于传统图像处理的导航路径提取方法的实时性好,精度较好,可以适应机器人在规整化室内养殖场导航的需求。基于神经网络的导航路径提取方法在各种复杂情况下运用时,需要多次采集数据、制作数据集等工作,工作量大,但在环境条件变化不明显的室内养殖场适应性较好。单一的激光导航技术的导航精度普遍较低,在室内养殖场的笼间稀疏、扫描特征不明显的情况下,不能形成导航路径。卫星导航技术适用于信号较好的开阔环境,在室内养殖场中难以得到有效的应用。路标导航可以储存大量的信息,在室内养殖场可利用其建立全局地图,辅助室内养殖场机器人实现定位与转弯的功能。
在室内养殖场,机器人将得到广泛应用,基于多种传感器信息融合的导航技术将为机器人实现精准、快速的作业提供导航保障。
猜你喜欢
农业工程学报(2022年7期)2022-07-09
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
农民致富之友(2020年28期)2020-10-20
食品与生活(2018年7期)2018-09-19
人民周刊(2017年16期)2017-09-25
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
