农业机械设备的自动转向装置集成系统设计研究
2022-10-20 15:00:06郑志良
南方农机 2022年20期
郑志良
(莆田市荔城区拱辰街道办事处,福建 莆田 351100)
电控转向一般在农机车辆方向盘或转向柱安装电机,该方法成本低,对车辆本身改动不大,控制扭矩小,但对安装精度要求高,操作过程中可能常出现滑移现象[1]。轮式农业机械自动转向系统控制是在农业机械自动化设备的基础上进行改善的,可见自动转向与自动化的关系密切,为进一步增强农业生产效益,满足现代化农业发展需求,笔者设计了一款结构简单、操作性强、精度高且便捷的自动转向控制系统。
1 机械设计制造中自动化技术优势
1.1 控制生产成本
传统农机设计过程的设计粗放,主要依靠工作人员理念完成,一旦出现设计不合理、理念错误现象,就会导致机械成本提高,而自动化技术的应用可控制成本。通过虚拟化、智能技术、自动化、集成应用等多种方式减少对人力的依赖,可应用更为科学的理念优化设计过程,确定机械设计制造参数,在生产中自动监测与控制,使各项资源得到最大利用[2]。
1.2 提升生产效率与质量
农业发展离不开机械制造,引入智能、自动的机械是农业发展的保障,因此设计过程中应控制机械质量,在农业机械设计制造过程中,需要确定机械参数,减少工作人员失误等问题。而自动化技术通过数控、自动化、虚拟等技术,会优化设计制造流程与工艺,提高农业机械设计质量,因而有助于我国农业现代化发展与生产力水平的提升。
1.3 优化机械设计制造
农机设计一旦出现问题,不仅影响农业生产发展,还存在安全隐患,自动化技术可促进机械优化,对设计制造过程展开检测、搜集并掌握设计制造相关数据信息,通过分析发现问题并对缺陷及不足进行优化,使农机设备得到保障。
2 推进农业机械自动化意义
2.1 实施自动化选择
推进农业机械自动化,要根据农业目前生产技术水平、条件、实际情况进行设计及生产,科学提升农业作业精准度及工作效率,在尽量节约成本的基础上增强机械设备安全性,对不同类型自动化模式进行公平、公正评价,按照一定顺序选择自动化模式,使农业机械自动化呈现阶梯式进程。
2.2 开发控制系统
农业机械自动化生产,需要以高效率、高精度为主要目标,在控制成本的前提下,尽量节约农业资料,实现安全生产,提升农产品的整体品质,以便满足人们对农产品的消费需求。若在推进机械自动化过程中一味地追求高度自动化与顶端科学技术,则研制出的技术成果可能无法达到农业生产需要,不符合农业实际情况,而技术越高的自动化设备价格越昂贵,不符合农机生产控制成本的理念。
3 农业机械自动转向控制系统的结构及性能特点
3.1 系统结构
轮式农业机械自动转向控制系统是我国一直应用的系统,具有良好的工作效益,实现了农产品的增值与质量的提升。该系统包括方向盘、执行系统、主控设备等部分,虽然每个部位作用不同,但结合在一起具有系统作用,主要控制车辆转向,保障车辆正常运作。自动转向将转向意图转化成数字贯穿于控制系统中,通过执行命令完成转向,满足驾驶员操作意图,保障了农业机械自动转向,如图1所示。其中,主控制器需要对信号进行采集、分析,判断设备运行情况,向方向盘、转向电机等部位发出指令,控制电机在安全、理想的情况下进行转向响应,减少驾驶员的机械转向,为驾驶员助力,减轻其驾驶负担。同时可对驾驶员操作指令进行识别,判断转向是否合理,一旦驾驶员有错误转向意图,系统可自动屏蔽,保证机械及驾驶员安全。
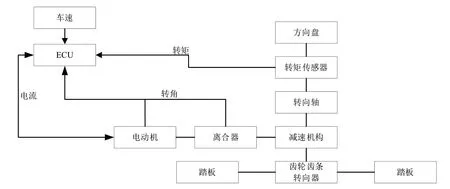
图1 农业机械自动转向控制系统结构
3.2 性能特点
自动转向系统拥有自动防故障能力,包括监控及实施算法,可根据不同故障形式、等级进行处理,保证机械正常行驶[3],其主要性能特点如下:1)自动防故障功能包括故障自动监测与自动处理,拥有自身的处理逻辑,提高了机械安全性。2)电源系统承担着控制器、两个执行马达及其他车用电器任务,负担较为繁重,若加入地动转向控制系统,需增大电源。3)自动转向控制系统由液压部分及控制单元部分组成,液压包括改装油路、电控阀,控制单元部分由MCU及周围电路、基于ARM9的嵌入式系统传感器、上位机组成,输入、输出的控制量为上机作用,通过角度传感反馈确定车轮位置。
4 农业机械设备的自动转向控制方法
4.1 PID校正环节选择
PID是一种线性控制,操作简单,广泛应用于自动转向中,该控制器由比例、积分、微分三个环节组成。其中比例环节反映系统信号可能出现的偏差,一旦出现偏差比例环节可对控制器进行控制,降低偏差[4];积分环节控制系统的强弱,对自控系统稳定性低、震荡等现象进行改善,加快系统循行速度,减少调节时间;微分环节控制系统运行,消除系统运行过程中的误差,增加系统稳定性,提高安全性。
4.2 PD控制原理
以插秧机为例,插秧机在工作中需要不断变化速度,同时速度应在规定范围内,如:转弯时需降低速度、曲线行驶时需随路径变化不断变化速度、直线行驶时保证匀速,且插秧过程中,工作速度需要通过转向能力决定。因此在插秧机工作中,需要适当的控制器根据速度变化趋势进行控制,计算工作与实际的目标偏差,以此作为自适应PD控制器输入,通过对速度进行在线整合,实现对系统参数的获取,输出转向轮数据偏角。因实际偏角与期望偏角有一定差距,可作为操纵控制器输入,通过操作控制器控制转向,使其执行一定动作,实现转角,进而达到控制效果[5]。
5 自动转向集成装置控制器设计
5.1 电控系统整体设计
自动转向集成电控系统由核心处理器、电路模块等部分组成,核心处理器为飞思卡尔MC9S12系列单片机,外部电路根据农机自动转向功能分为最小系统电力、电源电路、数字量传感器采集电路等模块。其中MC9S12对主要数据进行运算,对相应内置外设进行通信及电机控制,为单片机提供正常工作基本条件,电源电路为整个系统提供不同的电压,保证系统正常工作[6]。采集车轮转向传感器的电压信号应用模拟量传感器;车轮转速传感器应用数字量传感器;电机控制电路根据单片机发出的PWM控制电机转向,CAN对上下位机数据进行交换;在保护系统中,应用保护电路预防电路板过热、过流,提升控制系统可靠度。整体设计如图2所示。
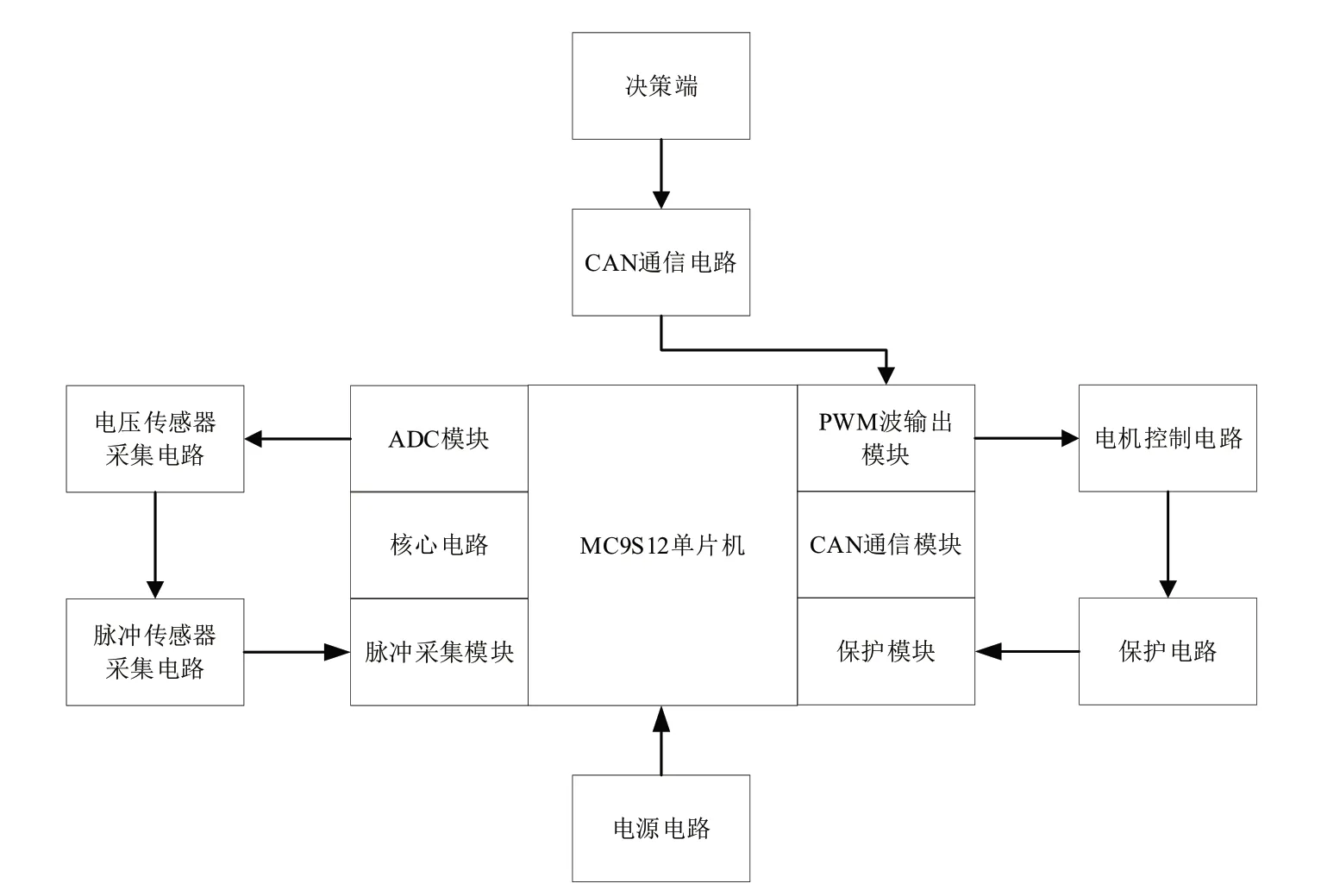
图2 自动转向集成装置电控系统整体设计架构
5.2 电源设计
传统农机发动机不发动,液压系统不工作,自动转向系统若在此时提供电源,会损坏电机与控制器[7]。为预防发动机未启动状况下自动转向系统操作失误,可通过设计点火开关信号触发控制器电源开启电路,设备熄火时点火开关无信号[8];点火开关输入时电压输入后端传给单片机,转向电机开始工作,提高了系统可靠性。
5.3 电机控制系统设计
通过单片机输出PWM和高低电平对控制端进行控制,完成对电机位置及速度的控制[9]。为防止电机低速工作时因堵转造成电流过大而烧坏电机,可通过电流检测电路进行实时监测。在下桥臂串联一个0.05 R的采样电阻,反馈到单片机进行分析检测,当检测值超出电流阈值,自动退出驾驶模式,避免因电流过大而烧坏电路与电机。
6 实验验证
对自动转向集成装置进行验证,将其装在一台高地隙喷雾机上,安装过程中,因该装置体积较小,具有一定便捷性,分析在不同的目标、车轮角度、速度时该设备的应用效果[10]。首先发动喷药机,保证转向液压系统正常工作,为自动转向装置供电,启动系统,通过电脑下发指令,令控制器测试角度及目标,初始角度为-20°,转向20°,观察效果。结果显示当上位机发送一个目标角度时,转向装置可控制车轮进行平稳、可靠转向,有较好的执行效果。其次测试速度,在角度一致情况下,测试低、中、高三种转向角速度方式下控制系统的控制效果,结果显示喷雾机可达到平稳、可靠的效果,且速度合理科学,具有一定准确性。
7 结语
综上所述,在自动转向控制系统的设计过程中,需要自动化、集成、智能等多种技术进行结合,提高设计效率,优化设计与制造工艺流程。在控制成本、保证安全的基础上提升农业机械工作效率,有助于农业发展,提升自动化技术水平。
猜你喜欢
电子制作(2019年13期)2020-01-14 03:15:28
四川农业与农机(2019年4期)2019-08-29 06:06:06
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
工业设计(2016年7期)2016-05-04 04:02:20
工业设计(2016年4期)2016-05-04 04:00:25
电子设计工程(2015年15期)2015-02-27 12:07:30
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15