
基于STM32的三激光位移传感器的在机测头设计
2022-10-15 13:17刘新波杨永青黎浪
现代信息科技 2022年14期
刘新波,杨永青,黎浪
(邵阳学院 多电源地区电网运行与控制湖南省重点实验室,湖南 邵阳 422000)
0 引 言
现代装备制造中,大部分精密运动同规则内外曲面的配合紧密相关,而规则内曲面的加工难度尤为突出,可以说,规则内曲面的测量和加工一直以来都是高端装备制造领域最突出的矛盾之一。
基于激光三角法制成的点激光传感器具有体积小、使用方便的特点,自身精度也能达到甚至突破微米级,是一种便于集成和应用的测量工具。合肥工业大学高隽教授研制一种旋转对称式激光三角传感器,能克服扫描时出现的表面阶跃、不连续纹理,同时还能够缓解激光出射方向上的颤动对测量结果的影响,而其局限性是未能消减整个被测面上的运动误差。目前在大多数研究中,并没有考虑激光测头对扫描运动误差的影响或者是考虑甚少,因而限制了激光位移传感器的推广使用。
为解决上述问题,设计一种基于STM32 的三激光位移传感器在机测头,该测头能够实现对孔类零件的在机测量,消减机床等装置自身运动精度对测量结果的影响。该测头系统以STM32F103 微处理器作为采集系统的主控芯片,应用模数转换模块和数据发送模块将采集到的数据发送至上位机,结合三个激光传感器采集的数据进行数据处理,获取内圆直径、圆柱度等几何参数。
1 总体系统设计
1.1 总体方案设计
该测头系统主要由数据采集部件、模数转换模块、STM32控制模块和数据发送模块组成。数据采集部件由三个激光位移传感器组成,负责采集接收到的数据。模数转换模块用于将模拟信号转换为数字信号。STM32 控制模块作为下位机模块负责对整个过程的控制。数据发送模块用于将数据发送给上位机。
如图1所示,数据采集部件的三个激光位移传感器分别将采集到的数据输入到模数转换模块,模数转换模块将模拟信号转换为数字信号,STM32 控制模块通过GPIO 引脚与数据采集部件、模数转换模块、数据发送模块相连接,实现对整个系统的控制,将采集到的数据传输到上位机中。

图1 系统总体框图
1.2 结构设计
测头整体结构如图2所示,该测头包括机架组件、锂电池、单片机控制板、蓝牙模块以及三个激光束测量及调校组件。机架组件主要包括带轴顶盖、上固定架、中调节架、下固定架、中心柱、底部安装盘和顶盖固定螺钉组,其中带轴顶盖可与其他旋转设备连接;第一激光束测量及调校组件、第二激光束测量及调校组件、第三激光束测量及调校组件三者的结构完全相同,分别可实现第一激光束、第二激光束和第三激光束的位姿调节和固定。锂电池负责为传感器、单片机、蓝牙模块等器件供电,下位机系统负责实时采集三组测量数据并进行预处理,通过蓝牙模块将结果发送至PC 端。

图2 整体结构图
2 硬件设计
2.1 传感器选型
为了控制本测头的结构尺寸,选择了Panasonic HGC1030 激光位移传感器,如图3所示,这款激光位移传感器的主要特点是体积小,外形尺寸仅为8×18×37 mm,即便是测头上集成3 个传感器,也能满足多种内尺寸结构的测量要求。该传感器使用高精度CMOS 为感光单元,内部使用一套独特结构和电路,绝对精度可达10 μm。同时,模拟输出是其唯一输出方式,按照通用标椎设置,即模拟电流模式:4 mA~20 mA 输出,模拟电压模式:0 V~5 V 输出,用户按需选择输出模式。采用三台测量精度为10 μm的HG-C1030 传感器进行测头集成,并在结构、电路和软件算法上进行合理优化,如取三者的均方根,理论上可使测头的测量精度更高,这也是本测头研制的基本出发点。

图3 HG-C1030 激光位移传感器
2.2 信号调理电路设计
STM32F103 自带3 个12 位可配置的AD 输入模块,可满足三传感器的应用需求。其输入的电压范围为0~3.3 V。由于选用的HG-C1030 型激光位移传感器,只支持模拟电流4 mA~20 mA 输出,模拟电压0 V~5 V 输出。直接采用传感器的模拟电压输出模式将超出STM32的输入电压范围,故无论传感器采用何种输出模式,均需进行调理。为了提高调理的准确性,本文传感器采用模拟电流输出模式,选用电流转电压调理方式,将转换后的模拟电压输入A/D 采样模块。
根据需要,本文采用的模块应满足可以将输入的模拟电流4 mA~20 mA转换为0~3.3 V。整个电路设计如图4所示,可将该模块分为四个部分:电流检测放大部分、II 级差分放大电路、量程调节电路和防止电源反接部分。
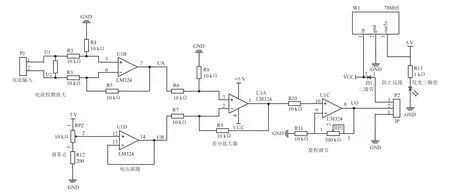
图4 信号调理电路
电流检测放大部分就是U1B 部分,电流从R1 的上端流入,下端流出。不难看出这是一个级差分放大电路,也就是一个减法运算电路,输出电压如式(1)所示:

即是电阻R1 两端的电压差,假如流过该电阻的电流为20 mA,那么产生的电压为20×100=2 000 mA,尚未达到A/D 模块的电压测量范围,所以为了高效利用A/D 模块的量程,需要将电压信号进一步放大,图中U1A 组成是减法电路,其输出电压等于-。U1D 组成一个跟随器,当电流信号为4 mA 时,为400 mV,若使U1A 的输出为0 V,就需要=,若要调节U1D跟随器的正相输入端,调节电位器RP2 改变分压即可,这样就有效解决了当输入电流为4 mA 时输出电压为0 的问题。接下来我们要添加的是放大电路,将U1A 的输出信号进行放大。在这里U1A 的作用即是最终放大,那么在使用时,将输入电流设置为U1A时,调节RP1 电位器,即调节电压放大倍数,直至输出电压为3.3 V。
2.3 AD 扩展模块设计
由于STM32F103 的AD 输入模块最多配置12 位[],其采样精度较低,直接选用将会影响测头的工作精度,所以仅在测头样机调试时选用,而正式应用时需要进行AD 扩展模块设计。AD 扩展模块选择Analog Device 公司的AD7192芯片作为核心芯片,在此基础上进行电路设计。AD7192 是内置一个低噪声、八通道、24 位Σ-Δ 型模数转换器,该测头系统采用三个传感器,即需要三个通道同时采集数据,三个传感器采集到的模拟信号经过信号调理电路之后,通过三个通道连接模数转换模块进行A/D 转换。AD7192 与STM32F103ZET6 系统通过SPI 协议进行通信,硬件接线如图5所示。
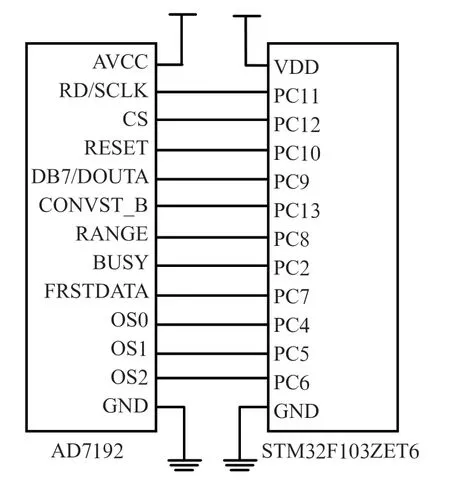
图5 AD7192 和STM32F103ZET6 连接图
2.4 电源电路设计
电源模块主要负责为数据采集模块、模数转换模块、无线传输模块等部分提供电源,其中数据采集模块三个传感器的工作电压为12 V,模数转换模块的工作电压为5 V,无线传输模块的工作电压为3.3 V,因此,电源模块同时提供12 V、5 V、3.3 V 电源。本测头系统采用12 V 直流电源输入,应用DC-DC 模块将12 V 转换为5 V,采用MP2482产生5 V 电压,电路如图6(a)所示,然后通过LDO 模块将5 V 转换为3.3 V,采用CJA117B 产生3.3 V 电压,电路如图6(b)所示。

图6 电源电路图
2.5 数据发送模块选择
数据发送模块用于将模数转换过来的数据发送至上位机。该系统采用无线传输的方式(采用成套的蓝牙传输模块)将采集到的数据发送出去。该测头系统选用的具体型号为HC-05,内置2.4 GHz 天线,工作电压为3.3 V,通过AT 指令进行控制,具有低功耗、高性能、低成本、体积小等优点。
3 软件设计
3.1 采集系统软件设计
如图7所示,STM32 数据采集程序流程可简述为:
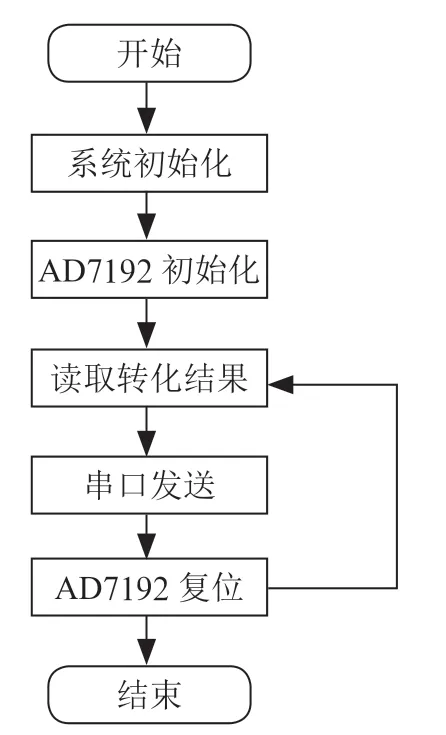
图7 STM32 数据采集流程图
程序开始运行后,首先进行系统初始化,将系统时钟设置为72 MHz;通过FCMS 端口将AD7192 连接到STM32,对AD7192 进行初始化;然后对所有的串口进行初始化,将发送模块与SATM32 相连接,设置波特率等信息;对定时器进行初始化,将定时器的时间设置为0.01 s,读取AD7192的模数转化结果。
3.2 卡尔曼滤波
3.2.1 原理介绍
在测量的过程中,三个传感器的测量数据都会受到噪声的干扰,且由于测量环境相同,外界噪声基本相似。若要尽量减少和评定这类误差,对数据进行滤波就显得尤为重要。
卡尔曼滤波是一种软件滤波方法,通过状态方程进行预测,公式为:

其中,、、分别为系统的状态变量、控制变量、输入噪声;、、分别为状态转移矩阵、控制矩阵、噪声控制矩阵。
系统的观测方程为:

其中,为传感器观测到的变量,为观测噪声,为观测矩阵。
3.2.2 仿真实验
为了验证卡尔曼滤波算法的效果,利用MATLAB 进行仿真分析,将传感器得到的数据经过AD 转换后导入MATLAB,经卡尔曼滤波模型预处理,加入相对误差和均方根误差进行置信度和精准度的检验。
如图8所示,传感器仿真数据经过卡尔曼滤波(通过卡尔曼滤波模型进行),加入相对误差和均方根误差,进行测量值和滤波值的误差对比。可以看出,经卡尔曼滤波进行数据处理后,所得到的仿真数据相比滤波前测量值误差明显减小,相对精度提高了1 倍左右,这说明数据精度得到了明显提高。
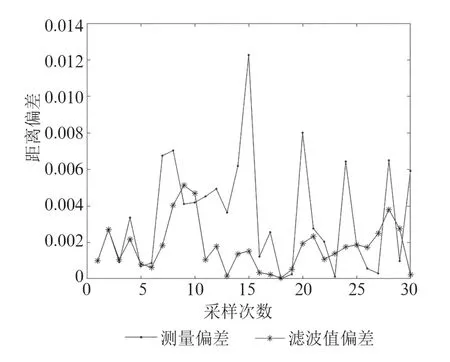
图8 滤波前后误差对比图
如图9所示为传感器对静止的标准量块进行位置测量,经过卡尔曼滤波后,对无干扰的理论值、直接测量值、实际值以及滤波值进行比较。通过对比分析得出,经卡尔曼滤波后的值与实际值更为接近,波动范围从18 μm 提高到6 μm,这说明滤波效果明显提高了精度。
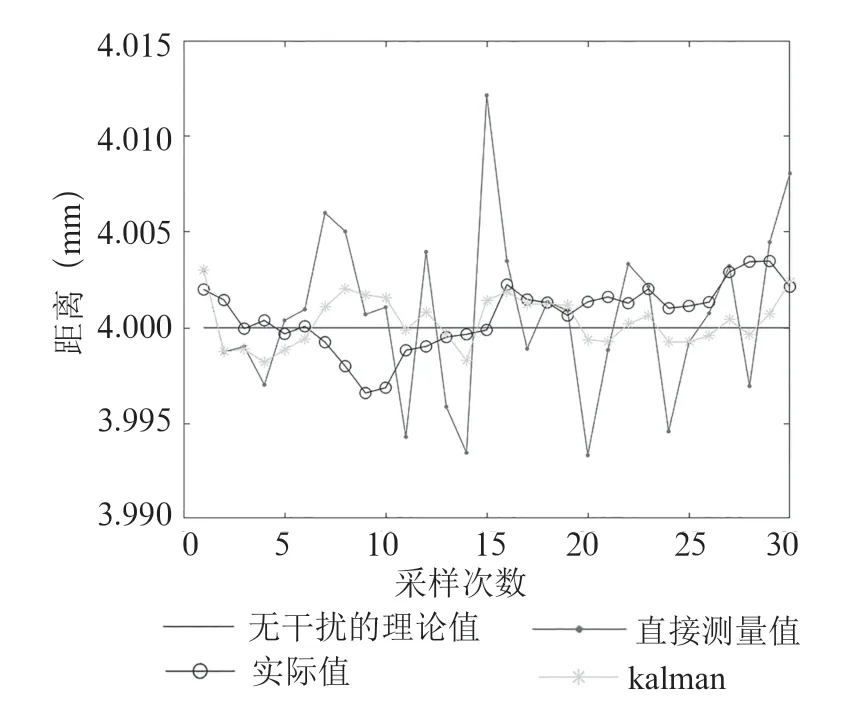
图9 卡尔曼滤波仿真结果
4 结 论
本文介绍了一种三激光位移传感器在机测头的系统设计与实验,设计了以STM32F103 系统为核心的控制电路,同时以三个高精度点激光位移传感器为基础,实现多通道同步采集,实时传输,并将采集到的数据进行滤波处理,从而提高精度。实验结果表明,该测头系统具有一定的可靠性和实用性。
猜你喜欢
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
新课程·中旬(2017年7期)2017-08-13
电脑知识与技术(2016年27期)2016-12-15
软件导刊(2016年9期)2016-11-07
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
科技视界(2016年14期)2016-06-08
中学生数理化·高二版(2016年5期)2016-05-14
中学生数理化·高二版(2016年5期)2016-05-14
儿童故事画报·智力大王(2016年3期)2016-05-05
