
基于光栅投影的隧道裂缝检测算法仿真研究
2022-10-15 13:17宿景芳周格马丽芳
现代信息科技 2022年14期
宿景芳,周格,马丽芳
(河北科技大学,河北 石家庄 050018)
0 引 言
随着我国公路、铁路隧道的大量建设,未来在隧道检测和维护上所需的工作量将会很大。目前应用于隧道环境安全检测的方法主要有雷达检测法和图像处理检测法。在雷达检测技术中,杂波和噪音的存在降低了目标回波信号处理的效率,且高频电磁波在介质中产生的高衰减性会使探地雷达在检测深度较大的裂缝时出现偏差;在应用图像处理检测法时,往往由于环境对比度低、光照不均匀、噪声污染严重等问题而导致最终的检测准确性较差。光栅投影三维测量技术是一种主动非接触式三维测量技术,融合了光电子学、图形图像处理、计算机控制、机器视觉等技术,是应用于工业生产控制与检测领域的新兴技术,具有广泛的应用前景。李华伟等搭建了基于相位测量轮廓术的光栅投影三维测量系统,实现了对叶片三维轮廓的精准测量。肖龙飞等将基于相位测量轮廓术的光栅条纹投影技术应用于钢轨表面的三维轮廓测量,并采用一种概率统计的方法来减少相位展开的误差。常轶民等采用双投影的相移检测法实现钢板孔洞厚度和三维轮廓的测量。虞梓豪等提出基于多频外差法的单目视觉的结构光重建,实现体积较小、形貌复杂物体的高精度重建。于国辉等通过基于四步相移法的相位测量技术与基于洪水填充法的相位解包裹技术重建了人体指纹的三维样貌信息。
综上,本文尝试将光栅投影三维测量技术应用于对采集的隧道裂缝进行三维重建,以此弥补传统图像检测算法准确性差且不能检测裂缝深度信息的缺憾。为了使重建的连续相位分布能有更好的效果,本文结合运用四步相移法和多频外差法进行条纹投射和相位展开,并对整个过程进行了仿真实验,实验结果表明,基于相移原理的光栅投影三维检测算法可成功实现对裂缝信息的三维检测。
1 光栅投影三维重建原理
基于光栅投影的三维重建主要是通过相位测量轮廓术来实现,相位测量轮廓术又称为相移法,其基本原理是由计算机产生正弦投影条纹,经数字投影仪投射到物体表面,正弦条纹经物体表面高度调制会产生变形,在变形处可采集到相位信息。用CCD 相机将变形条纹拍摄下来,再利用计算机进行相位场提取、相位恢复,得到绝对相位值,最后再经系统标定、坐标变换可得物体表面的三维数据。


其中,(,)为背景光强,(,)为物体表面不均匀反射率即调制因子,∅(,)为隐含物体高度信息的相位主值函数,Δ∅为相对于相位主值的相移量。四步相移法是将一组包含4 种不同初始相位的光栅条纹图案投影到目标表面上,并在每个像素处计算相移。经典四步相移算法的四个条纹图案位置光强可以描述为:

通过以上4 个公式可求出相位函数:

由于相位函数是由反正切函数求得的,因此它的取值属于包裹相位,即只有相对相位信息而没有绝对相位信息,不能根据这个函数来还原物体表面的场高度,需要对其进行包裹展开,加入周期信息,还原绝对相位。相位展开方法主要有结构光编码法、枝切法和多频外差法。还原绝对相位之后就可以进行相位解调,从而还原物体表面的高度信息了。物体相位-高度映射的系统原理如图1所示。
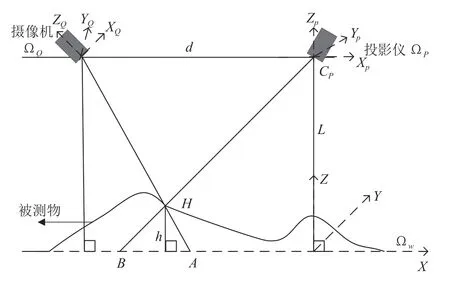
图1 光学测量原理
其中,C为光栅投影系统的出瞳中心,P为摄像机的入瞳中心。投影仪的光心C和摄相机的光心P所在直线与参考平面保持平行,为投影仪与摄像机连接到参考平面的距离,为投影仪与摄像机之间的距离,为被测物的高度,相位和频率的关系可由下式表示:


继而由上式可推出:
根据上述高度与相位转换函数即可得到物体表面各位置的高度值。
2 系统设计
本文提出的基于光栅投影的裂缝检测技术采用四步相移法和多频外差法来模拟对隧道裂缝的结构光投射和三维重建过程。四步相移法是目前公认比较成熟的条纹相位采集法。多频外差法由于其精度高、速度快,是一种应用前景较好的相位解包裹方法,其原理是将多个不同频率正弦光栅的相位做差,将小周期的相位主值转化为大周期的相位差,从而使相位差信号覆盖整个视场。本系统采用三频外差方法,使得最终相位差信号的周期大于整幅图像,从而使图像中各个像素在这个周期内具有唯一相位,最终完成相位解包。
本方法的基本设计步骤为:(1)首先由计算机通过软件生成四步相移的光栅条纹图像,将投影仪与计算机连接;(2)运用张正友棋盘格法进行投影仪和相机的标定;(3)使用计算机软件产生三种频率,每种频率包含四种初始相位的光栅条纹并通过投影仪将其依次投射到被测含有裂缝的物体上;(4)用摄像机获取变形后的被测物体表面条纹图像,并将图像传送到计算机;(5)使用MATLAB 软件通过四步相移法求解出包裹相位值;(6)利用多频外差法将包裹相位展开;(7)通过相位和高度转换函数还原裂缝表面高度信息并进行三维重建,具体过程图如图2所示。

图2 三维裂缝识别方案过程图
本系统采用多频外差法进行相位的包裹展开,得到绝对相位。
3 实验与仿真
采用结构光四步相移法与多频外差法模拟对物体表面裂缝的三维重建,此过程可分为两个部分:实验部分与仿真部分。实验部分所需的测量系统由计算机、投影仪、摄相机、标定板等组成。采用分辨率为1 024(H)×768(V)的投影仪,所选用摄像机的分辨率为1 920(H)×1 200(V),焦距为16 mm,光圈设置为16,相机曝光时间设置为30 ms 左右。
3.1 系统标定
选择合适的角度(30 度左右)固定好相机和投影仪,标定过程中保证二者相对静止;将打印好的标定板(棋盘格/圆形阵列)贴到较为平整的白板上;投影仪关闭,相机拍摄打印的标定板图片;投影仪打开,将标定图案投射到白板上,相机拍摄投射到白板上的标定板图片;改变系统相对白板的位姿,重复步骤S3、S4,拍摄大于15 组的数据;使用所拍摄的打印标定板图片进行相机标定,获取相机内外参数并保存每个标定板上的图案位置信息。
搭建的系统硬件平台示意图如图3所示,相机和投影仪的视场要重合,投影仪投射出去的光束要全部覆盖在被测物上,之后固定好相机和投影仪的位置,以防止标定后两者的位置关系发生变化。

图3 实验系统示意图
3.2 光栅条纹投射及图像采集
本实验投射三组不同频率(1/73 Hz、1/64 Hz、1/56 Hz)的正弦条纹光栅信号,每组光栅信号包含4 个不同的相位,分别为0°、90°、180°、270°,共12 张图片,图4为频率为1/56 Hz 的变形光栅条纹。
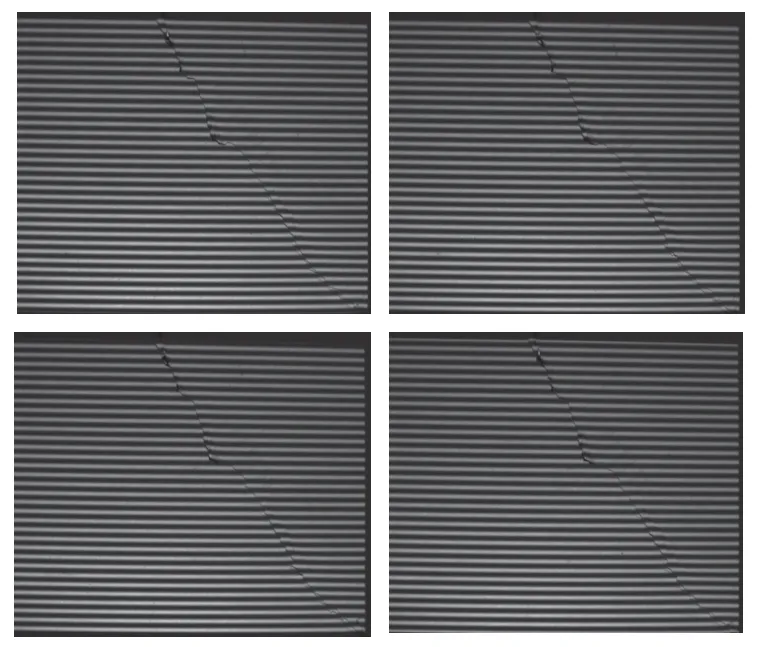
图4 频率为1/56 Hz 的调制条纹图
3.3 图像解包裹
实验过程中采用四步相移法得到的包裹相位图以及运用枝切法和多频外差法进行相位展开后得到的解包裹相位图如图5所示。

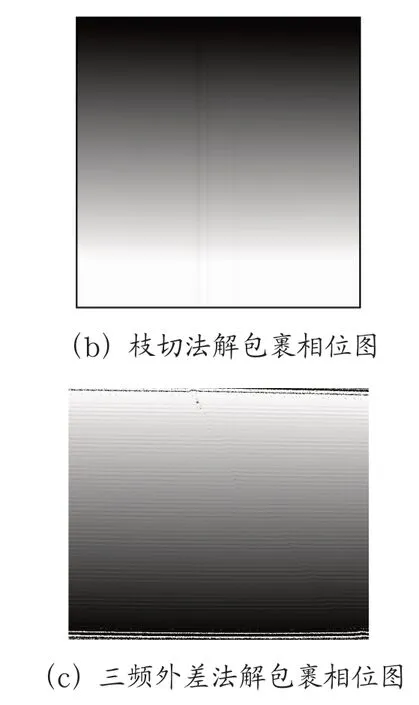
图5 包裹与解包裹相位图
由以上实验效果图可以看出包裹相位的相位不连续,不能反应连续的物体位置信息,枝切法由于受噪声的影响,解包裹效果不够理想,精度不高,而多频外差法的物体细节还原效果好,抗干扰能力强,精度高。
3.4 三维重建
对于采集到的不同角度不同位姿的多组图像高度信息,采用基于特征点的拼接和基于ICP 的全局优化算法进行三维重建,原图及三维重建后的效果图分别如图6、图7所示。

图6 原图

图7 三维重建图
4 结 论
本文采用基于相位测量轮廓术的光栅投影三维重建技术模拟了对隧道裂缝的检测,通过搭建实验环境与结合使用仿真软件,实现了四步相移法与多频外差法相结合的物体表面裂缝的检测识别。实验结果表明,该方法的一系列步骤能够实现对裂缝信息的准确检测和还原,为真实隧道环境下基于光栅投影的裂缝检测技术提供了切实可行的理论参考依据。
猜你喜欢
现代电子技术(2022年9期)2022-05-12
科技视界(2020年8期)2020-05-18
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
新课程·中旬(2017年7期)2017-08-13
科技资讯(2016年25期)2016-12-27
科学与财富(2016年29期)2016-12-27
中国文化遗产(2016年5期)2016-12-14
