基于任务空间的2P3RR并联机构尺度综合
2022-10-14 06:05韩旭炤张小粉杨新刚向玉春
机械与电子 2022年9期
韩旭炤,张小粉,杨新刚,向玉春,刘 雯
(1.咸阳职业技术学院机电学院,陕西 咸阳 712000;2.西安理工大学机械与精密仪器工程学院,陕西 西安 710048)
0 引言
并联机构具有刚度大、承载能力强、运动惯性小和精度高等优点,在机器人及机床研究中引起了广泛的重视[1-2],特别是自20世纪90年代美国第1次将并联运动机构成功运用于机床以来,并联运动机床得到了大力发展[3],因此,针对并联机构的研究和开发成为科技界的热点课题。特别是在混联运动平台的开发方面少自由度并联机构的广泛使用,使得串并联结构的优势互补,为机床及机器人的大力发展提供了广阔的前景。
在混联运动平台的开发中,对其并联机构部分进行深入研究更有利于指导结构的设计和获得良好的综合性能,而针对并联机构的运动学解析问题是其机构分析和机构设计的基础,在少自由度并联机构的运动学解析及运动性能分析方面已有大量的研究和积累。谢哲东等[4]对一种新型的3-PSP微型并联机构进行了运动学及工作空间分析,并进行了相关仿真;彭红梅等[5]以空间三平移并联机构作为研究对象,建立运动学方程模型,分析了其奇异性、操作空间和灵巧度等性能指标;王红等[6]结合机构的灵巧性分析,对一种新型的 3-PUU 并联机器人进行了尺度综合,为该机构的构型设计提供了理论依据;谢俊等[7]提出一种PRR+2-PRRU型两平移一转动并联机构,运用解析法进行位置分析,并通过MATLAB验证位置求解的正确性;谢志江等[8]提出了一种新型六自由度并联机构,分析了该机构输入与输出之间的速度映射关系,建立了雅可比矩阵,以工作空间和全域灵巧度为性能评价指标,完成了机构尺度设计;卢帅龙等[9]提出了一种可折叠3-R(US and SPU)并联机构并采用遗传算法对其相关设计参数进行了参数优化。
本文基于一种五坐标混联工作台的开发,对其所采用的2P3RR并联机构部分进行了相关研究。该并联机构为两自由度平面运动并联机构,可在其动平台上串接回转轴,实现主轴头部件的三轴运动。本文给出了2P3RR并联机构运动学位置正解、逆解,推导出了该机构的速度雅可比矩阵,并分析了该机构的工作空间,基于雅可比矩阵的工作空间全域灵巧性能指标完成了该并联机构主要结构参数的确定,以方便指导其设计,对混联运动平台的开发具有一定的参考价值。
1 并联机构
如图1所示为本文讨论的并联机构。AiBi(i=1,2)为相互平行的直线移动导轨组件,在该机构中为驱动部件,C1(C2)C3为该并联机构的动平台。滑块Bi(i=1,2)在导轨AiBi(i=1,2)上滑动,使得AiBi(i=1,2)的长度发生改变从而驱动整个并联机构产生运动。B2B3垂直于A2B2且在滑块B2处固联,B1C1杆、B2C2杆和C2C3杆在C1(C2)处通过复合回转铰链联接,B2C2杆和B3C3杆的长度相等,C2C3杆和B2B3杆的长度相等,从而B2C2杆、C2C3杆、B3C3杆和B2B3杆构成平行四边形,该并联机构中采用了平行四边形机构,从而保证了动平台C1(C2)C3在并联机构发生运动的过程中姿态保持不变,该机构动平台的姿态在当前状态总是垂直于2条直线移动组件。
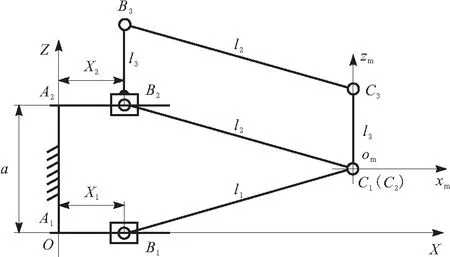
图1 机构原理
2 位置关系求解
如图1所示,∑O为该并联机构的定平台坐标系,坐标原点O选在导轨A1B1上,X坐标轴与导轨A1B1的中轴线重合,坐标轴正向如图1所示,Z坐标轴由A1指向A2;∑om为该并联机构的动平台坐标系,由于该并联机构动平台的姿态保持不变,从而将坐标原点om设置在复合回转铰链的回转中心处,xm、zm坐标方向和定平台坐标方向一致。
设∑om的坐标原点om在∑O中的坐标表示为(x,0,z),则该机构的位置逆解为:
(1)
(2)
根据几何关系,该并联机构的动平台在驱动滑块的右侧,从而式(1)和式(2)中取“-”号。
令l1=l2=b,则该机构的位置正解表达式为:
(3)
(4)
式(3)和式(4)中,取“+”号,a为2导轨之间的距离。
由于本文在尺度综合部分,需要用到该机构的雅可比矩阵,对式(1)和式(2)两边分别求导,整理后,得到该并联机构的雅可比矩阵为
J(q)=
(5)
3 并联机构尺度综合
3.1 工作空间分析
通过位置关系求解可以看出,该机构的位置正、逆解具有显式的表达式,可以采用解析的方法进行求解,从而可以采用扫描的方法获得该机构的工作空间,由于该机构各结构参数待定,因此,这里采用图解的方法进行说明。
以动平台上的C1(C2)点为参考点进行分析,动平台上的其他各点可以通过坐标变换的方式获得。容易看出C1(C2)点是以(X1,0,0)、(X2,0,a)为圆心以l1、l2为半径的2个圆的交点,在如图2所示位置处,滑块Bi(i=1,2)为初始位置,此时C1(C2)点位于工作空间的最左端。
若滑块Bi(i=1,2)在导轨AiBi(i=1,2)上移动,即Xi(i=1,2)在区间[Ximin,Ximax]上变化时,C1(C2)点的集合是以(X1,0,0)、(X2,0,a)为圆心以l1、l2为半径的2个圆分别沿X方向滚动形成的包络面的交集,如图2阴影部分所示。在工程应用中,有效工作空间通常取2导轨之间的区域。

图2 工作空间分析
3.2 基于任务空间的结构参数确定
任务空间是机构工作空间的子空间,这里讨论在满足任务空间的前提下确定并联机构的结构参数从而使并联机构紧凑灵活。一般情况下,驱动元件的行程、并联机构的杆长以及导轨之间的距离等是影响并联机构工作空间的主要因素,下面基于任务空间确定这些结构参数。
如图3所示,若要求该并联机构的任务空间为w×h的矩形区域,结合工程实际需要,设定该矩形区域分布在上、下导轨之间且相对于导轨呈对称分布,为了便于说明,约定2并联杆BiCi(i=1,2)的杆长相等。设动平台参考点C1(C2)到达任务空间的左边界上界P1点时,滑块B2在初始位置处(即和A2点重合,此时X2=0),而滑块B1沿导轨滑动了d1;当动平台参考点C1(C2)沿任务空间的上边界运动到点P2时,滑块B2沿导轨滑动了d2,此时滑块B1沿导轨滑动了d1+d2;根据结构的对称性,当动平台参考点C1(C2)沿任务空间的左边界由P1点运动到P4点时,滑块B1在初始位置处,而滑块B2沿导轨滑动了d1;当动平台参考点C1(C2)沿任务空间的下边界由P4点运动到P3点时,滑块B1沿导轨滑动了d2,而滑块B2沿导轨滑动了d1+d2。通过以上分析可以看出,为了便于紧凑设计,导轨的行程为d1+d2就能满足任务空间的实现,而d2实际上就是任务空间在X方向上的尺寸w。

图3 任务空间分析
设l1=l2=b,任务空间上边界到上导轨的距离为d,若任务空间的左边界在直线X=x1上,则任务空间各端点的坐标为:P1(x1,0,h+d) ;P2(x1+w,0,h+d) ;P3(x1,0,d) ;P4(x1+w,0,d)。 此时容易求得
(6)
由式(1)可求得
(7)
于是
(8)
L为导轨的行程。
从而,杆长至少要满足如下的关系:
b≥h+d
(9)
若b=h+d,当并联机构参考点到达P1点时,杆件B1C1和导轨方向垂直,此时并联机构处于奇异状态,因此,式(9)中只取“>”。从而在确定并联机构任务空间的左边界直线X=x1时,x1应满足如下的关系式:
(10)
在工程实践中,若要求α=β,于是
(11)
(12)
从而有:
(13)
(14)
d1=bcosβ-bsinα=h
(15)
从而可求得导轨的行程以及2导轨之间的距离为:
L=d1+d2=h+w
(16)
(17)

3.3 任务空间灵巧性分析
在并联机构的设计和开发中,通常采用并联机构的速度雅可比矩阵进行相关灵巧性分析和计算,该机构的雅可比矩阵如式(5)所示。基于雅可比矩阵可构造的并联机构的灵巧性评价指标有[10]:条件数、最小奇异值以及可操作性等。实践表明,采用雅可比矩阵的条件数作为灵巧性度量指标比较合理,雅可比矩阵的条件数可定义为
(18)
‖·‖为矩阵任意范数。条件数与奇异值的关系为
(19)
σmax、σmin分别为雅可比矩阵J(q)的最大、最小奇异值。容易看出,k(J)的取值范围为 1≤k(J)≤∞。当k(J)=1时,矩阵的各奇异值相等,并联机构的形位各向同性。为了使机构趋于各向同性,应使雅可比矩阵的条件数越小越好。
由于雅可比矩阵的元素与机构所处形位有很大关系,因而采用雅可比矩阵描述的是机构的局部特性,不能反映并联机构在整个任务空间的情况。采用文献[11]提出的评价指标对该并联机构进行灵巧性分析,即
(20)
w为并联机构的整个任务空间;η为基于整个任务空间的条件数分布而得到的全域性能指标。
4 应用实例
结合作者团队当前正在开发的一种五坐标混联工作台,其并联机构部分采用本文讨论的2P3RR并联机构,要求动平台在工作平面内的工作范围为500 mm×500 mm,任务空间边界到导轨的距离为600 mm,如图4所示,由前文推导,得到:
b≥h+d=1 100 mm
考虑结构的紧凑性和恰边界条件,动平台参考点C1(C2)到达任务空间的左边界上界P1点时,左导轨上的滑块B2在初始位置处,其他各边界点处滑块的位置关系如图4虚线所示,图4中单位为mm。根据工程中的实际应用情况,只需要沿着导轨的高度方向调整滑块的初始位置即可。
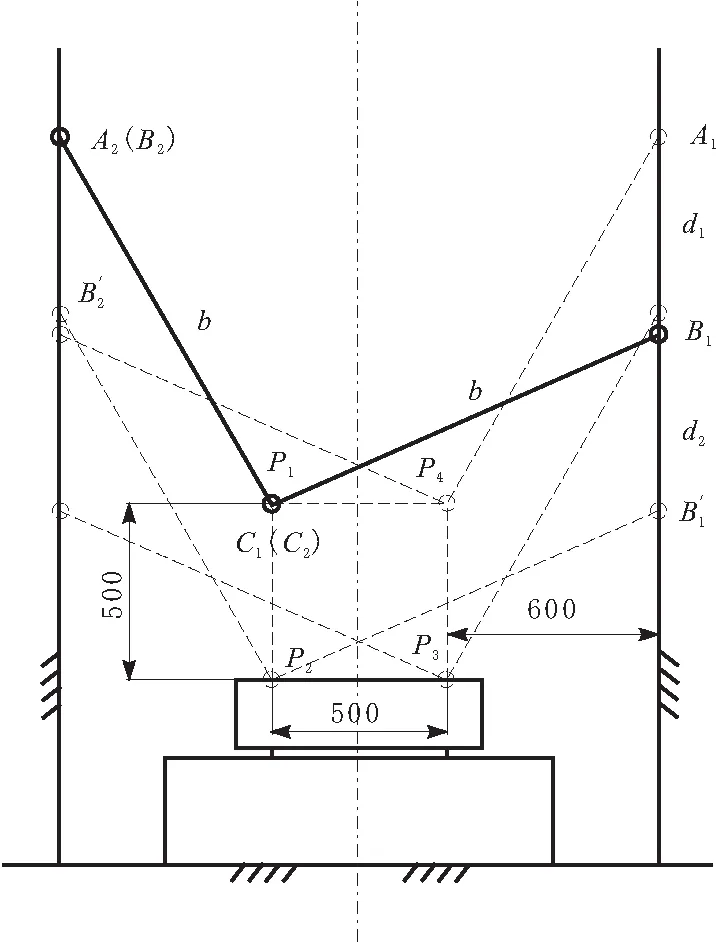
图4 应用实例结构参数确定
由前文的推导可以看出,当杆件长度b确定以后,x1也能确定,因此,该并联机构主要的结构参数为杆件长度b。为了便于说明杆件长度b对机构灵巧性的影响,从而确定其长度值,让杆件长度b在区间[1 150 mm,1 450 mm]上变化,对机构的整个工作空间求雅可比矩阵条件数的倒数的全域均值η,其随杆长的变化曲线如图5所示。可以看出,当杆件长度b取1 300 mm时,其全域灵巧性指标η较为理想。此时,可求得该机构的导轨行程L=960 mm。采用扫描法获得该并联机构的工作空间如图6所示,其中,方框线即为该五坐标混联工作台并联机构部分的任务空间区域。在此任务空间中并联机构动平台参考点在各点处的雅可比矩阵条件数的倒数分布如图7所示,可以看出,任务空间中各点处的灵巧度值分布在区间[0.60,0.85]之间,且此时该机构的雅可比矩阵条件数的倒数的全域均值η为0.68,说明当前选定的结构参数比较理想,能够满足设计中关于机构灵巧度的要求。
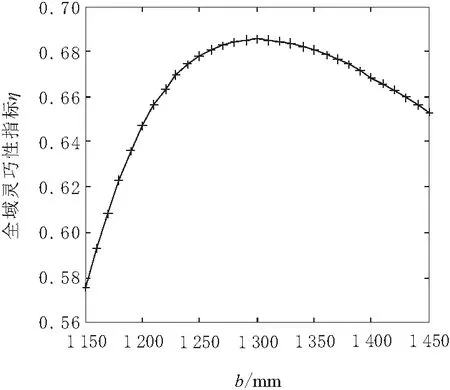
图5 机构灵巧性全域评价指标随b的变化曲线

图6 并联机构工作空间扫描

图7 任务空间内各点处的灵巧度值
5 结束语
本文基于五坐标混联工作台,对其并联机构部分进行了相关研究,得到如下结论:
a.在混联运动平台的开发中,其并联机构部分采用少自由度并联机构既能发挥并联机构的优势,又能获得良好的综合性能。本文结合作者团队当前正在开发的一种五坐标混联工作台的并联机构部分进行了相关研究,探讨了主要结构参数之间的相互关系,并进行了设计计算,为混联运动平台的开发奠定了理论基础。
b.采用恰边界条件,结合基于雅可比矩阵的并联机构工作空间全域灵巧性能指标进行并联机构主要结构参数确定,能更好地反映并联机构在整个工作空间上的工作性能,且编程简单,易于处理,能够容易获得综合性能理想的主要结构参数值,更能方便地指导并联机构的设计,对混联运动平台的开发具有一定的参考价值。
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生理科应试(2021年10期)2021-12-07
轻兵器(2019年8期)2019-08-30
电机与控制学报(2018年9期)2018-05-14
求学·理科版(2017年10期)2017-12-19
中学生数理化·高三版(2016年12期)2017-03-02
婚姻与家庭·性情读本(2017年1期)2017-02-16
中学生数理化·高一版(2008年4期)2008-11-15