一种高精度航空磁法测量系统
2022-10-13 06:15王涛牛云飞高定州
科技资讯 2022年20期
王涛 牛云飞 高定州
(北京探创资源科技有限公司 北京 100071)
世界上矿产资源种类万千,总体而言可划分为金属矿物和非金属矿物两大类;能源矿物和非能源矿物。而磁法勘探通过研究岩矿石磁性差异来查明地质构造和矿产资源分布规律,在富含磁性矿物的金属矿床中效果尤为显著。而通过低空航空磁法勘探可以快速在地形复杂地区进行测量,保障人员安全,快速圈定找矿靶区,指导后期勘探,缩减勘探成本。目前,北京探创公司自主开发了无人机磁测系统,包含无人机采集硬件组合系统和配套的地面数据处理软补偿系统。
1 低空航磁测量系统
目前,低空航磁测量飞行系统主要有动力三角翼滑翔机载低空航磁系统、无人飞艇载超低空航磁测量系统、无人机超低空航磁测量系统这3 种。其中近年来无人机技术飞速发展,更安全稳定,效率高,逐渐占领更多市场份额。(1)多旋翼无人机磁测系统。该系统可随地形飞行,飞行高度低,可方便做大比例尺磁测,但是飞行时间短,不如固定翼效率高。(2)固定翼无人机磁测系统。该系统效率高,飞行速度快,可随地形飞行,但是对场地有要求,需起跑道,降落点不易控制。(3)近几年兴起的垂直起降固定翼无人机,同时兼容多旋翼机和固定翼机的优势,能够更安全有效地操作,在行业中异军突起[1-4]。
2 无人机航磁系统组成
目前设计为HC01 飞鲨电动垂直起降固定翼无人机搭配西安华舜磁通门传感器。无人机航磁系统的构成包括:垂直起降固定翼无人机飞行器、地面飞行控制站、导航系统、磁通门磁力仪、数据采集模块。
该系统由无人机为旋翼和固定翼组合,旋翼定点起降,安全,对场地要求不高,航线飞行时切换为固定翼,可大幅度节省电量。翼展2.2 m,加上航磁设备机长1.45 m,但是起飞起飞重量仅10 kg,可使续航时间长达2 h。飞行海拔可达4 000 m,通信距离20 km,可在高原山区有效作业。最重要的是机身采取全复合材料,无人机与磁力仪采用碳纤维杆固定,固定螺丝采用铝合金制,无磁性,仅无人机电机对航磁设备有干扰,但我们采取前置电池、后置碳纤维杆硬连接磁力仪方式,减少了无人机对磁力仪的干扰,同时无人机系统易配平衡,整体评价为干扰小、不受环境限制、安全系数高,结合自主研发的配套软补偿系统,可大大提高数据质量,做到有效勘探。
图1为无人机磁测系统实物图;图2为地面控制站操作界面。

图1 无人机磁测系统实物图
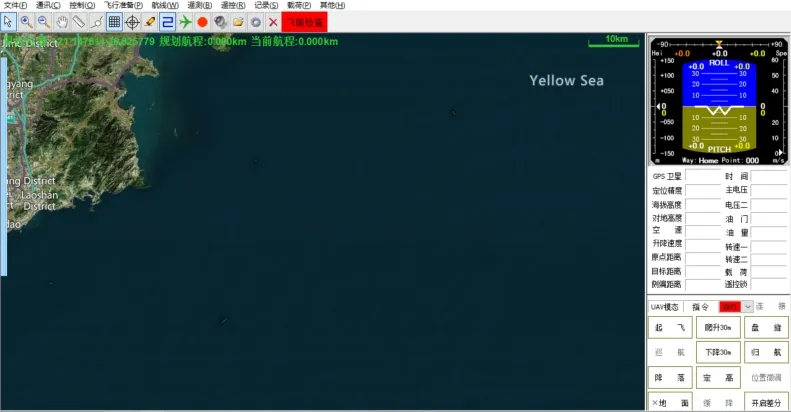
图2 地面控制站操作界面
3 磁补偿
磁补偿采用事后软补偿进行。
(1)以现在的工艺来说,一般磁通门传感器三轴正交角度误差在0.3°以内,以每个分量的磁感应强度为40 000 nT(总场69 280 nT),正交误差为0.2°为例,使用磁通门传感器测量计算的总场与真实值差值为243.72 nT,这个误差对于磁法测量来说是一个很大的误差,甚至可以说是错误。于是需要在测量时采取同一航向进行测量,以减少误差。以磁倾角45°,航向正南北为例,在偏航角为5°时在同一磁感应强度下可以产生约40 nT的差值,该误差不能满足高精度磁测的要求,因此需要一种校正的方法来减少姿态误差。
三轴磁通门传感器中误差是由于三轴非正交、数据采集卡三通道灵敏度不一致、数据采集卡零点漂移、传感器本身剩余磁场,通过真实磁场值与实际测量磁场值得关系建立修正模型[5-6]。根据理想三轴磁通门传感器在测量同一磁场强度时测得数值与测量姿态无关的特点,建立目标函数。最后,利用支持向量回归机(SVR)线性算法计算出磁传感器的各个校准参数。
假设传感器三轴分别安装在OX1、OY1和OZ1,而理想状态下传感器的三轴应为OX、OY和OZ。其中,OZ轴与OZ1轴重合,且坐标面YOZ与Y1OZ1共面,则可定义OX轴与X1OZ1面之间的夹角为α,与X1OY1面的夹角为γ,OY与OY1之间的夹角为β。实际传感器三轴OX1、OY1和OZ1与理想正交三轴OX、OY和OZ的空间转换关系如图3所示。
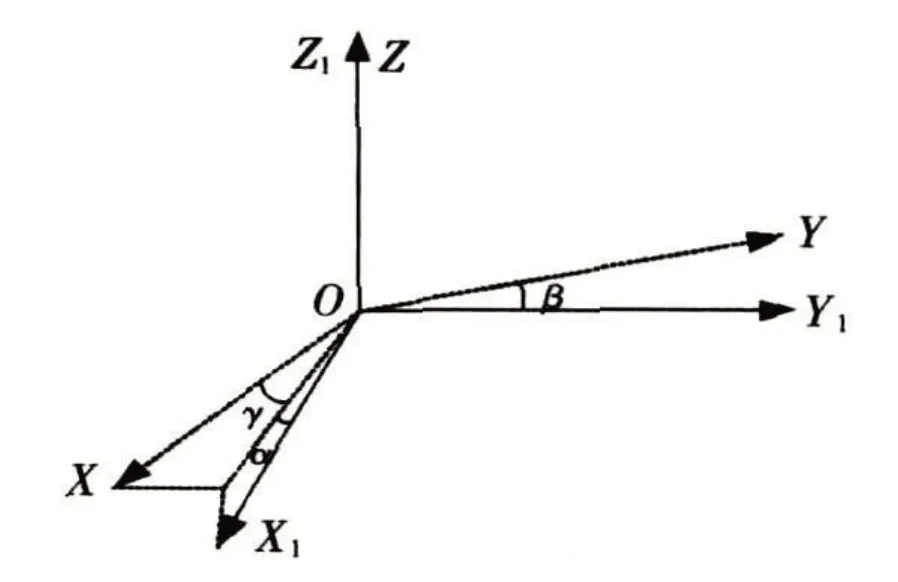
图3 传感器实际三轴与理想正交三轴关系
根据上面的关系描述可以建立以下公式。
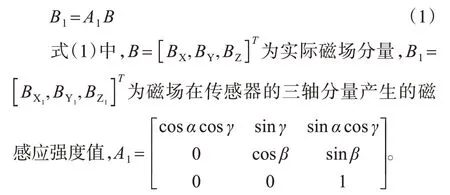
由于3 轴的灵敏度不一致,假设Z轴的灵敏度为1,设定Y轴的为KY,Z轴为KZ,有
采集卡存在零点漂移,传感器里面也存在剩余磁场,最终三轴磁通门传感器的实际输出为
由于‖B‖(总场),可以利用质子磁力仪测得较为准确的数值,因此可以使用实际测得的多组B1值采用线性支持向量回归机对式(5)进行线性回归,计算出C-1,B0,然后对每组数据进行校正。
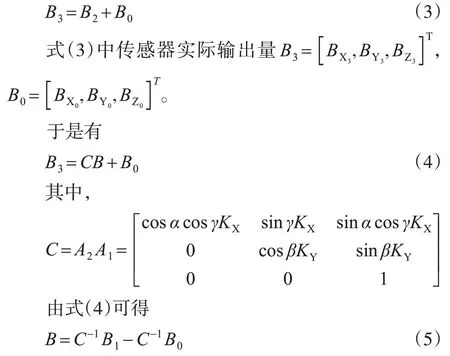
对该架无人机磁测系统的三轴磁通门传感器进行误差修正实验,在相对稳定的地磁场环境下,任意改变磁通门传感器的摆放姿态,分26 次对传感器的三轴输出B1(t)进行测试并记录结果。
利用计算好的校正参数对不同姿态下的三轴磁通门传感器输出数据B1(t)进行修正,修正后所测磁场强度‖B(t)‖较修正前变化情况如图4 所示。由图4 可知曲线的震荡弧度由339.54 nT,降到了29.87 nT。在姿态角度差不超过10°的情况下震荡值小于3 nT,能满足磁法测量要求。
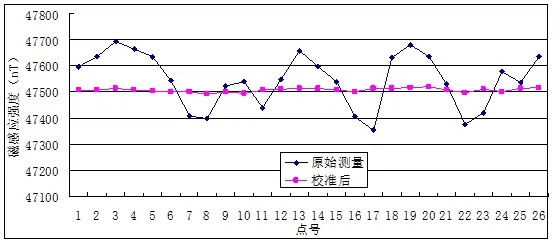
图4 姿态误差修正前后对比图
(2)在一地磁场较稳定的地方以质子磁力仪为日变站参考校准该测点地磁场,通过磁通门传感器安装在无人机航测系统上前后对比可测得飞机固定磁场的干扰参数,通过开关无人机电源前后可测得无人机磁测系统电路和电台的磁场干扰参数,统计结果如图5所示。由图5 可知,无人机对磁场的影响基本为稳定值,约为4 nT,飞机在通电的情况下电路影响也基本为稳定值,可以统计出飞机加电路的影响为8.2 nT,该干扰为稳定干扰,可以简单去除。
图5 静态干扰测量曲线
图6 为舵机在1 Hz 频率摆动情况下的干扰曲线,可以看出转向舵位于机翼部位,离传感器较远,影响在0.5 nT左右,升降舵距离传感器较近,最大干扰在3 nT左右,方向舵最大干扰在1 nT左右,由于在航线测量时飞行一般较平稳,舵机一般不参与工作,因此可以忽略舵机转动的影响,而且舵机转动时间短,也可以用滤波的方式去除舵机干扰。
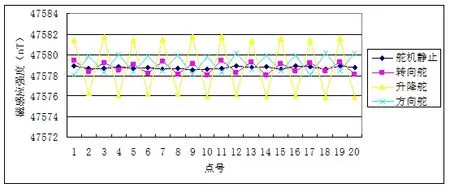
图6 舵机以1 Hz频率摆动干扰测量曲线
在一地磁场较稳定的地方以质子磁力仪为日变站参考校准该测点地磁场,将无人机固定在地面,通过调整无人机飞行电流的大小可统计出飞行电流产生的干扰,统计结果如图7 所示。由图可以看出飞行电流的影响在6~8 nT,因此可以通过线性回归的方式计算电流和干扰的关系公式,飞机飞行的电流一般在16 A左右,并且飞行记录里面有每秒的电流数据。
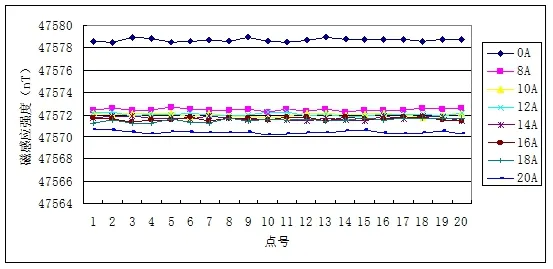
图7 飞机飞行电流干扰测量曲线
根据电磁感应定律,长度为l的导体,以速度v在磁感应强度为B的匀强磁场中做切割磁感应线运动时,在B、l、v互相垂直的情况下,导体中产生的感应电动势的大小为
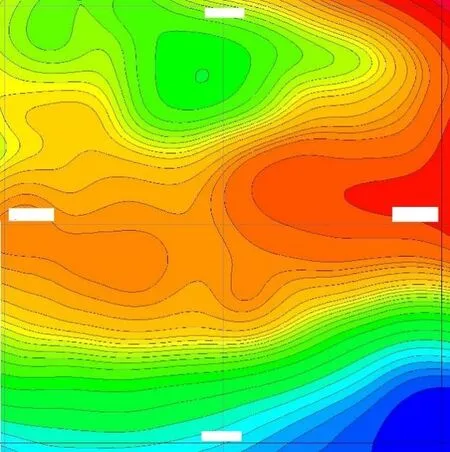
图8 航空磁法△T上延180 m平面等值线异常图

式(6)中的单位均应采用国际单位制,即V、T、m/s。
磁测系统中磁传感器到采集设备之间导线的垂直分量为0.05 m,飞机每一秒的速度飞行速度可以通过GPS 数据计算,与飞行方向垂直的磁感应强度可以通过传感器的By、Bz分量计算,采集卡的灵敏度约为:41.666 7 μT/V,因此磁感应强度误差约为Bg=×0.08×v×41.6667×10-6,Bg、By、Bz单位为T。
4 无人机航磁系统处理软件编制
(1)将存储卡保存的二进制文件解码,读出每个数据包里面的时间、姿态、位置、电流、磁通门传感器三轴的电压文件;(2)通过算法将位置文件的经纬度按照选择的坐标系投影为直角坐标;(3)读取测区边界文件删除测区外的数据点和非航线的数据点;(4)将采集到的磁通门传感器的3 个电压数据转换为磁感应强度数据;(5)读取磁通门传感器姿态校准参数,对3 个磁感应强度数据进行校准,并计算总场;(6)解析姿态文件、坐标文件,计算飞行的真实航向,计算出磁场在真实X、Y、Z轴的值,并计算出每个测点的磁倾角、磁偏角,以便后续采用变倾角化极处理;(7)读取飞机磁场干扰文件,对采集的磁感应强度数据进行各项补偿;(8)读取质子磁力仪采集的日边数据,对无人机磁测系统采集的数据进行日变校正;(9)将处理后的有效数据存盘。
5 系统使用性验证
为了验证该航测系统的实用性,在山东某金矿区域进行了地磁与航磁测量对比试验,其中地磁采用100 m×20 m 测网,航磁采用测网为100 m 间距,航速为23 m/s,随地形飞行,对地高度为180 m。
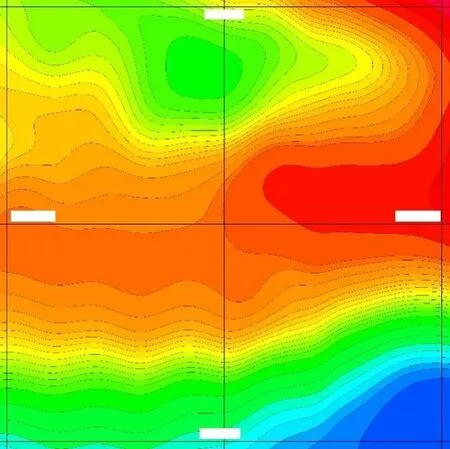
图9 地面磁法△T平面等值线异常图
飞行获得的实测数据首先进行了磁测补偿以及各种改正等[7-8]。为了对航磁与地磁数据进行对比,将地磁数据进行了向上延拓180 m,对比航磁与地磁△T平面等值线异常图,两者在位置、范围、走向、形态与异常中心等特征基本一致,对应良好,说明该无人机磁法测量系统可以用于野外的航空磁法勘探。
6 结语
经过实际测量试验,该无人机航测系统在含磁性矿物的矿床勘探中应用是有效的,可以在大面积测量中取代地面磁法测量和有人机航空磁法测量,尤其在植被覆盖区和山区,施工难度要求不高,快速圈定找矿靶区,降低勘探成本。
猜你喜欢
小学科学(2022年8期)2022-09-07
舰船科学技术(2021年12期)2021-03-29
汽车维修与保养(2021年8期)2021-02-16
时代英语·高一(2019年1期)2019-03-13
山东工业技术(2017年13期)2017-07-14
军事文摘·科学少年(2017年4期)2017-06-20
军事文摘·科学少年(2017年2期)2017-04-26
中学生数理化·高二版(2016年12期)2017-02-28
少儿科学周刊·儿童版(2016年1期)2016-03-14
少儿科学周刊·儿童版(2016年1期)2016-03-14