
RTK辅助的城市免像控无人机倾斜摄影建模分析
2022-10-11 12:25饶维冬张林杰马云龙
北京测绘 2022年9期
饶维冬 张林杰 黄 筱 冯 刚 马云龙 左 强 熊 豪
(中国电建集团贵阳勘测设计研究院有限公司, 贵州 贵阳 550081)
0 引言
智慧城市、数字城市、实景三维中国[1-3]等概念的提出和普及对测绘成果的真实、立体、时序化反映都提出了更高的要求,同时也促进了地理信息技术的不断更新。摄影测量中的倾斜摄影测量技术应运而生,倾斜摄影测量具有高度的真实性与立体性已广泛应用到了多个领域中[4]。
无人机倾斜摄影是由无人机搭载一个或多个(通常两个或五个)数码相机摄影系统来获取多角度的地面影像,通过后续内业的数据检查、空三加密等数据处理步骤完成最终实景三维模型的建立[5]。以往的倾斜摄影数据处理受限于影像定位定姿系统(position and orientation system,POS)的精度,在空三加密时需要在测区具有一定数量、分布均匀的像控点,对于城市、荒山等测区将大大增加航测工作量和延长生产周期[6]。而现有无人机已集成了全球导航卫星系统(global navigation satellite system,GNSS)和惯性测量单元(inertial measurement unit,IMU),GNSS提供位置信息,IMU则提供姿态信息,二者能够形成一个良好的互补。且GNSS系统已发展成多模多频,不仅增加了可视卫星数量,还极大地优化了卫星的空间结构,提高了定位的准确性和可用性[7-8],因此探索免像控的无人机倾斜摄影建模对于摄影测量未来的发展具有一定意义。国内对免像控的摄影测量已作了比较多的研究,如文献[9]提出了利用无人机免像控快速构建高精度数字地表模型(digital surface model,DSM);文献[10]总结了针对河湖环境布设控制点困难问题,验证了基于无人机免像控技术在河湖遥感监测中的可行性;文献[11-12]总结了适用于大比例尺、带状地形图测量的免像控无人机航摄,但针对城市免像控无人机倾斜摄影建模相关的分析较少。因此从满足成果精度要求的前提出发,以节约项目成本和兼顾作业效率为原则,探索城市免像控的无人机倾斜摄影建模的适用性具有一定的现实意义。
1 倾斜摄影测量与免像控航测技术
1.1 倾斜摄影测量
摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体的几何、属性等可靠信息的工艺、科学与技术[13]。其中倾斜摄影测量多在同一飞行平台搭载多台传感器(通常为五镜头)进行数据采集,可同时获取垂直与倾斜多角度地面影像。镜头朝向垂直于地面拍摄的影像通常称为正射影像,而镜头朝向与地面呈一定角度(大于5°)拍摄的影像常称为倾斜影像。相较于传统单一的正射影像,倾斜摄影测量能够得到地面物体更为精细的信息,如清晰的建筑物侧面纹理信息。正射、倾斜影像示意图如图1所示。

图1 正射、倾斜影像示意图
1.2 免像控航测技术
多角度采集到的地面影像配合控制点、影像POS进行空三加密测量即可将影像坐标转换到指定的空间坐标系下,此时影像上的每个像素点都有了统一坐标系下的三维坐标。由共线方程可知,地面控制点实际是为了求解方程中的未知数a1、a2、a3、b1、b2、b3、c1、c2、c3,从而将各像素点转换到指定空间坐标系下。
(1)
式中,(x,y)表示像点的像平面坐标;f为像片主距;(X,Y,Z)表示物方点的物方空间坐标;(XS,YS,ZS)为摄站点的物方空间坐标;a1、a2、a3、b1、b2、b3、c1、c2、c3为三个外方位角元素得到的矩阵[14]。
在免像控摄影测量中影像曝光时刻的三维位置与姿态即外方位元素由POS提供,POS精度的提高既提高外方位元素的精度,又提高了像点坐标的精度,即可有效地进行免像控的摄影测量[15]。
2 倾斜摄影数据采集与处理
2.1 飞马D2000倾斜摄影测量系统
使用的无人机为飞马D2000搭载DOP3000五镜头倾斜模块,无人机及摄影模块见图2。

图2 飞马D2000与DOP3000五镜头倾斜模块
2.2 测区概况与航线规划
测区位于贵州省贵阳市,地处云贵高原。测区呈矩形,面积约1.2 km2,高差约200 m,包括河流、道路、桥、住宅等地物类型。
在进行外业航飞数据采集之前首先需进行规划航线,本次飞行设计地面分辨率(ground sampling distance,GSD)为1.5 cm,为使最低点的分辨率也满足要求,无人机采用了仿地变高飞行。航线规划航向重叠率80%,旁向重叠率65%。测区总面积约1.2 km2,本次实际航飞面积约1.5 km2,飞行1个架次,飞行时间约30 min,共获取4 992张影像,航片影像清晰、色彩均匀,满足本次项目的使用要求。
2.3 数据处理
数据处理采用ContextCapture软件,该软件是一款可由照片或点云自动生成三维实景模型的软件,具有兼容性强、自动化程度高的优点,已广泛应用于三维实景建模。在软件中的数据处理主要包括影像数据、POS数据导入,区域网联合平差,空三加密,多视影像匹配等步骤,处理完成后可得到免像控的倾斜模型。
外业数据采集与处理的详细步骤如图3所示。
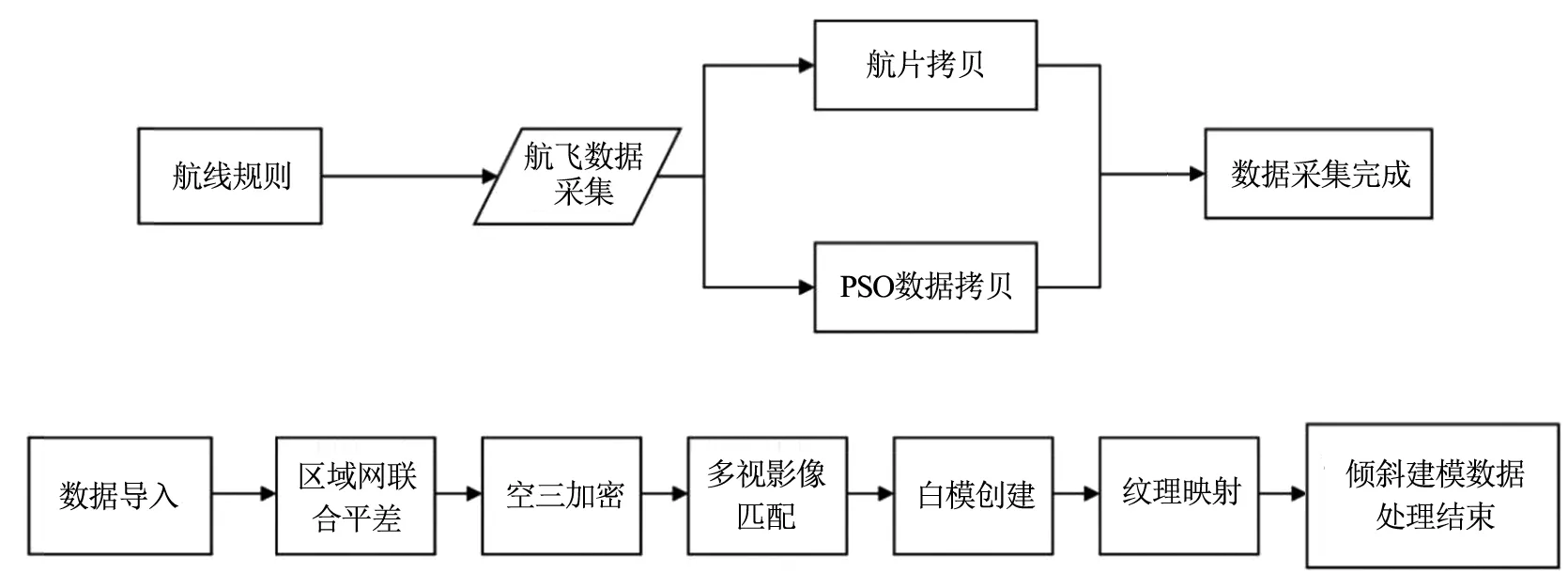
图3 数据采集与处理流程图
倾斜摄影模型相较于传统正射影像拥有了更为详细与丰富的侧面纹理信息,本次建模完成后模型色彩均匀、清晰,测区倾斜模型见图4。

图4 建模完成的测区倾斜摄影模型
3 免像控建模与精度分析
为验证基于实时动态载波相位差分技术(real time kinematic,RTK)实时得到的影像POS应用于倾斜摄影建模的精度,数据采集完成后在测区采集了40个点,如房角、公路地标线等特征检查点。
将检查点导入在ContextCapture软件已建好的模型中,将特征检查点的坐标与模型中实际位置的坐标进行比对可得出免像控倾斜摄影建模的精度,各特征检查点的误差详见表1。
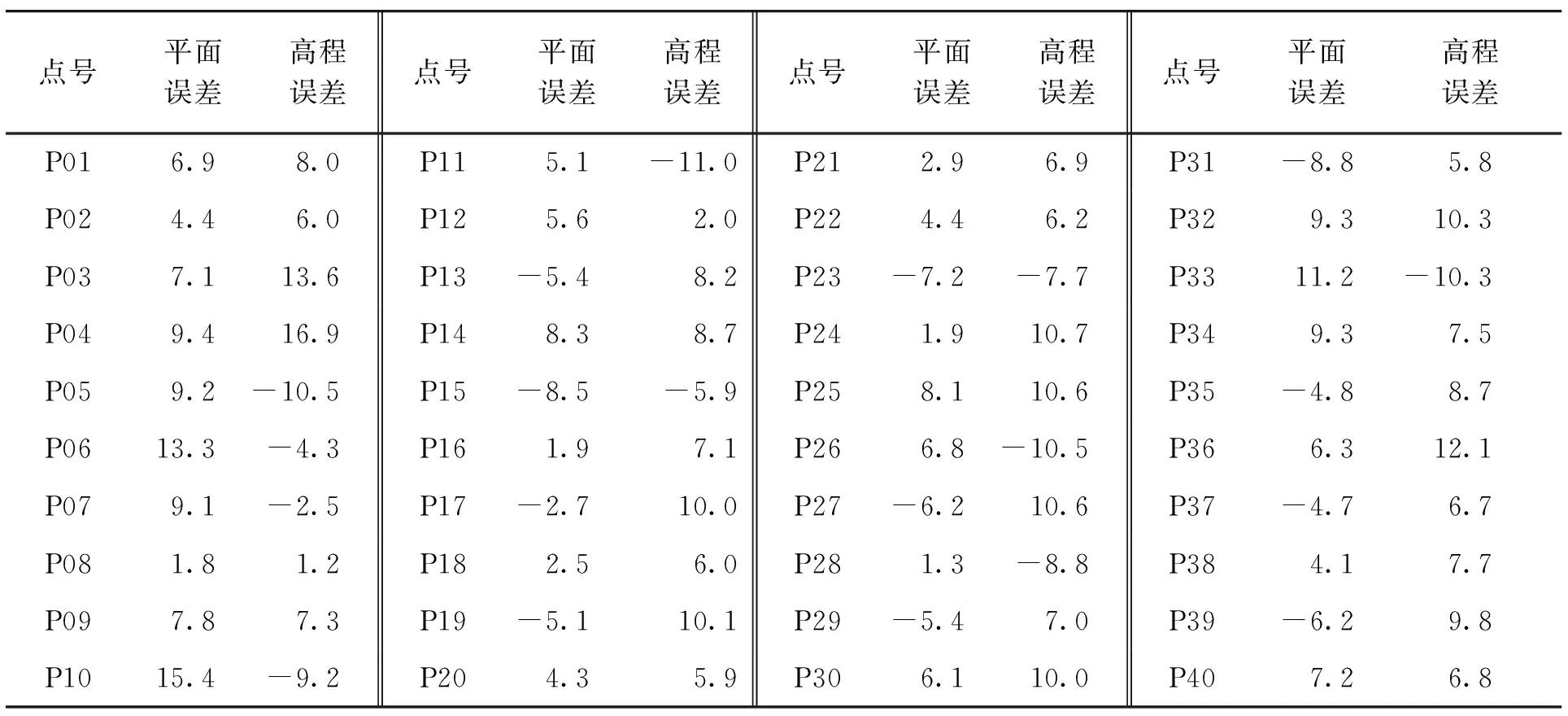
表1 免像控倾斜摄影建模精度表 单位:cm
由表1可得,平面中误差为7.1 cm,高程中误差为8.7 cm,满足了《城市测量规范》(CJJ/T 8—2011)中对于1∶500大比例尺地形图的精度要求[16]:平面中误差不大于图上0.5 mm(即不大于0.25 m),高程中误差不大于0.15 m。表明RTK辅助的城市免像控倾斜摄影建模模型既能够满足1∶500大比例尺的成图应用需求,也能够提供具有丰富纹理信息的三维模型。
4 结束语
通过在测区内的特征检查点,论证了RTK辅助的无人机免像控航摄技术用于城市倾斜摄影建模的可行性,且相较于需提前布设地面控制点的传统无人机航摄技术,免像控航摄技术减少了工作量,简化了对于复杂地形、城市等难以进入、遮挡严重地区的测量工作。倾斜摄影建模也将为高效议政和决策提供数据基础,促进城市发展、治理、运行效能整体提升,助力城市数字化转型。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
机械工业标准化与质量(2022年8期)2022-10-09
计算机系统应用(2022年4期)2022-05-10
科技创新与品牌(2022年4期)2022-05-08
电脑知识与技术(2018年18期)2018-11-01
西部资源(2018年1期)2018-11-01
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
建筑建材装饰(2017年6期)2017-07-04
建筑工程技术与设计(2015年12期)2015-10-21
职业·中旬(2009年12期)2009-06-01
