基于解耦算法的三容水箱液位控制仿真研究
2022-10-11 10:15王宇欣常广晖刘树勇
现代电子技术 2022年19期
王宇欣,常广晖,吴 越,陈 诚,刘树勇
(海军工程大学 动力工程学院,湖北 武汉 430033)
0 引 言
工业中MIMO多回路系统耦合现象十分常见,例如舰船航行时舵机的旋转弹俯仰和偏航通道之间存在着耦合现象,生物培养装置中系统温度、pH值、CO存在着强耦合性。系统的这些耦合性质不利于控制装置对于各个变量的调控,对于生产应用和实验研究造成很大的干扰。三容水箱具有非线性时延系统,具有较大的惯性、时延较长、变化关系非线性,是研究多回路耦合控制的典型对象,很多工业过程控制的对象都可以抽象简化成三容水箱模型,具有液位、流量等参数测量、观察方便的特点。解耦算法对于MIMO系统可以实现将一个多变量系统转化为多个相互不关联、不耦合的子系统,有利于采用PID对多个液位进行单独控制。
在现代军用工业生产中,舰艇的各种装备的使用和维护保养都需要对液位进行精确的控制,以便达到最好的使用效果。文献[1]通过Matlab/Stateflow采用PID控制策略进行水箱的建模,利用Matlab GUI设计三容水箱液位实时监控系统,但是在建模过程中将阀门视为恒流阀,忽略了阀门的滞回特性,严重影响了水箱模拟仿真的精确性。文献[2]对于三容水箱系统通过简单PID、串级PID算法以及模糊控制对三容水箱系统进行液位控制,三种方法应对不同系统都需要对控制器进行多次调参,算法应用的广泛性不好。文献[3]通过解耦算法首先对水箱进行输入量的解耦,之后采用ControlLogix控制系统对双容水箱进行液位控制,但是控制系统过于复杂,相较于PID控制,需要调节的参数过于繁多,在应用过程中不利于使用和维护。因此本文通过考虑阀门的滞回特性对三容水箱系统进行精确建模,设计可以适应多种工况的解耦算法,并在此基础上对水箱液位进行传统而简洁的PID控制,实现好的液位控制效果。
1 三容水箱工作原理
DTS200三容水箱的示意图如图1所示,水泵P和水泵P分别向水箱T和T注水,水箱T与水箱T的流动性由阀V控制,T与水箱T的流动性由V控制,每个水箱都有各自的泄流阀用于模拟水箱使用时产生的泄流误差,水箱T、T、T的泄流阀分别为V、V、V。
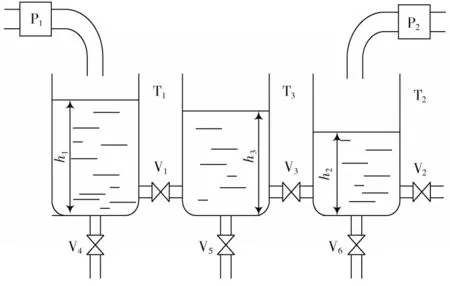
图1 DTS200三容水箱原理图
三容水箱系统液位控制的目标是水箱T和水箱T的液位,假定阀门V、V、V全部打开,V、V、V全部关闭,通过控制水泵P和P来调节T、T的液位高度。水箱T的液位受到水泵P和水箱T和T之间的流量的影响,水箱T的液位受到水泵P和水箱T和T之间的流量的影响,中间的水箱T同时受到水箱T和T液位的影响,因此T、T两水箱的液位、都相互有影响,产生了耦合,对于液位控制造成了不利的因素。
2 三容水箱模型搭建
2.1 三容水箱机理分析
根据质量守恒原理,水箱液位的变化可以由以下公式表示:
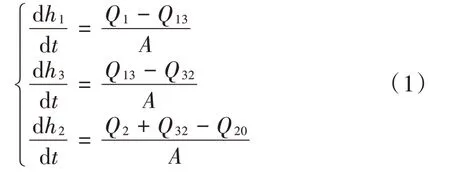
式中:、表示水泵P、P的供水量,单位为m/s;Q表示水箱T、T、T之间的流量,单位为m/s;表示水箱的横截面积,三个水箱相同;规定水箱的最大液位是600 mm。
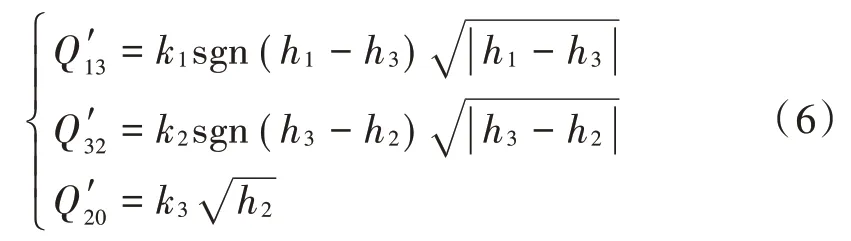
根据托里切利规则:

可以得到:
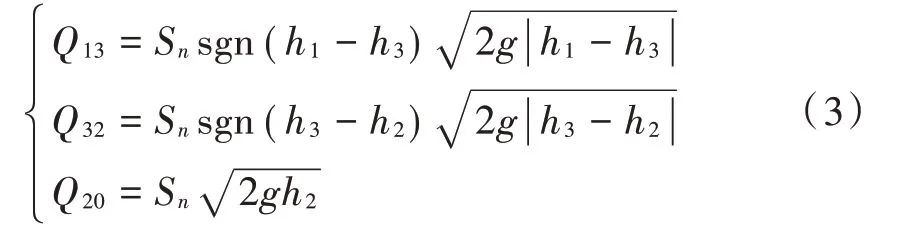
式中:h为液位高度,单位为mm;S为阀门的流通面积,单位是m,由阀门开度决定。

式中S为阀门最大的流通面积。
定义阀门流量系数:

则式(3)可以进一步表示为:
定义=[,,]为系统状态变量,=[,]为系统输出量,=[,]为控制量,则三容水箱数学模型可表示为:


2.2 阀门特性模型
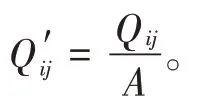
三容水箱系统通过连通阀控制水箱之间水位的流量,通过流出阀来模拟水箱的泄露状态。工业用的电磁阀流量系数通常与开度不是一一对应的,往往具有滞回和非线性特性。图2表示的是V的位置与阀门流量系数的实测关系曲线。
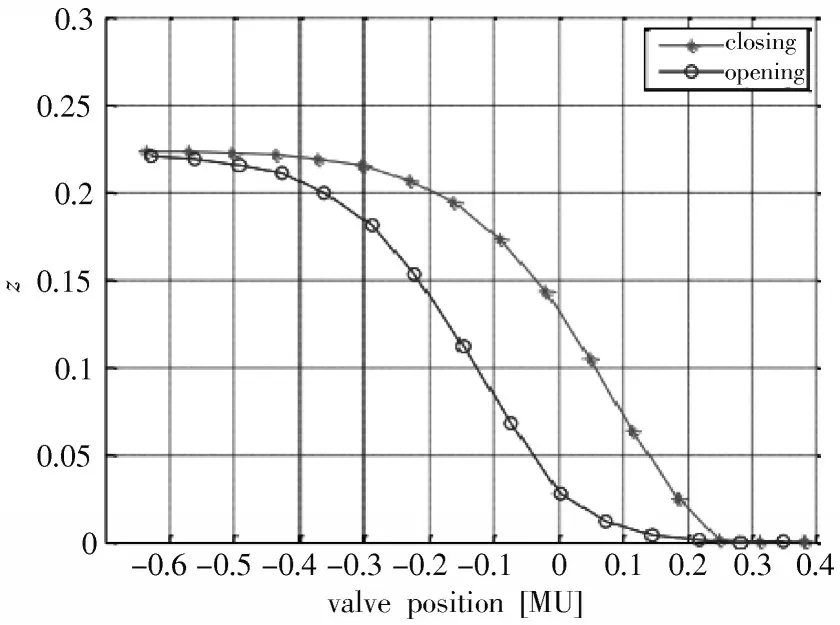
图2 阀门V2位置与k的关系曲线
本次研究为了仿真的精确将阀的滞回特性考虑在内,对流量参数进行分析。对于图2的曲线,如下的公式具有较好的拟合性:

其中:

阀门模块的输入为阀门开度[0,1(]0代表全关,1代表全开),输出为阀门流量系数,其模型如图3所示。

图3 阀门子模块模型
2.3 水箱特性建模
为了防止水箱中的水在使用过程中产生溢出,需要限制水泵的开关,当水箱内的液位高度超过某个限制的时候需要强制关闭,当低于限制水位的时候水泵可以正常使用,模块中的水泵使能液位为0~600 mm。对于水泵的开关应该有从0到最大值6 mm/s的限制。因此使用Simulink搭建水箱内的模型,如图4所示。
图4 水箱子模块模型
2.4 三容水箱总体模型
水箱系统按照图1进行布局,三个水箱连接各自的流出阀和连通阀,按照上述建立的模块进行连接得到三容水箱系统的整体布局如图5所示。

图5 三容水箱总体模型
3 解耦算法及PID控制器的设计
3.1 解耦算法
三容水箱系统是双输入双输出系统,水箱T与水箱T通过水箱T相连,一定会出现相互耦合,两个输入对两个输入都有干扰,需要通过解耦装置将一个相互耦合的双输出双输出转化为两个单输入单输出系统。
为了实现T、T液位的解耦控制,解耦控制采用如图6所示的状态反馈策略。
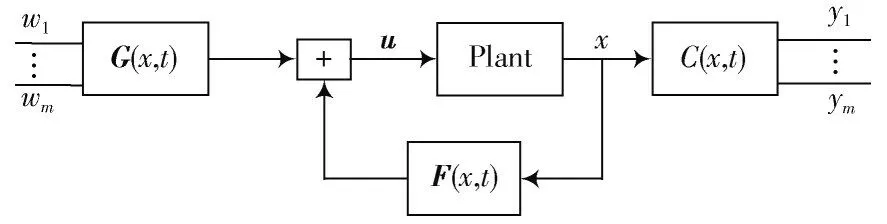
图6 三容水箱解耦控制原理框图
由分析可知水箱的数学模型为:




显然,三容水箱系统输入的维数和输出的维数相等,可以进行解耦。引入如下形式的状态反馈:

式中:(,)是二维列向量;(,)是非奇异矩阵;()是和原输入矩阵相同维度的新的输入向量。通过计算合适的(,)、(,)来实现第个输入w只影响第个输出y。
其中,(,)表达式为:

式中:

(,)表达式为:

式中:=diag{,}。
通过计算得:

对于方程组的参数和都取值为0.03,与取值相同,与取值相同。
通过Simulink建立的解耦控制器如图7所示。
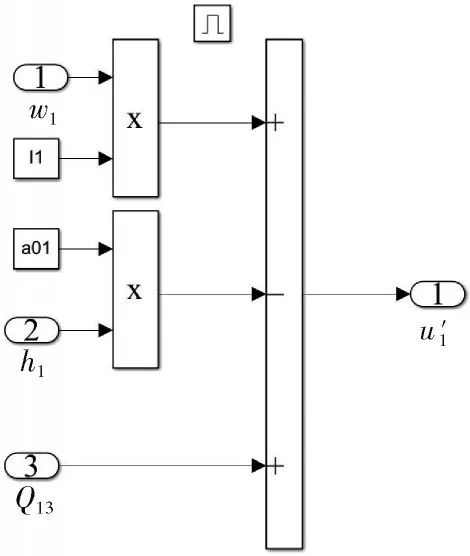
图7 解耦器内部结构
图7中添加使能端口,可以自由控制解耦器的开关,以便于更加直观地观察解耦前后,PID对于水位控制的效果。各个模块连接方式如图8所示。
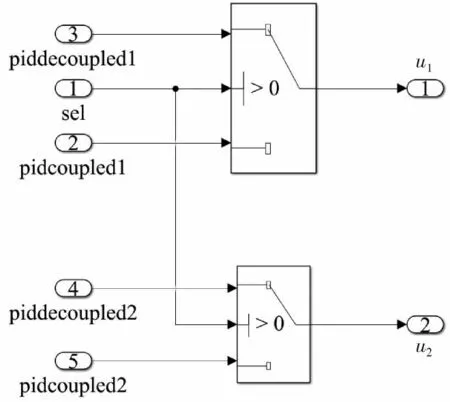
图8 解耦器频道选取模块结构
对于解耦器频道选取模块可以按照如下方式连接,使得三容水箱输入模块在解耦器启动和关闭两种状态分别连接、和′、′。
3.2 PID控制器
PID控制器是依靠偏差的比例(Proportional),积分(Integral)和微分(Differential)进行控制,PID控制器通过改变比例系数、积分系数和微分系数进行调节控制器的参数。经过多次调试,确定各系数为=2.2,=0.8,=0,以此进行PID控制模块的设置。将已经设置好的模块进行组合可以得到基于解耦算法的三容水箱液位控制系统,如图9所示。
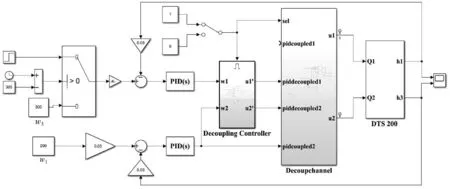
图9 基于解耦算法的三容水箱系统
4 模型测试结果分析
仿真阶段,利用Matlab/Simulink环境及机理模型进行测试。设置的目标液位分别为和,对于,前300 s的液位为300 mm,之后的目标液位为340 mm;的值恒定为200 mm。如图10所示。
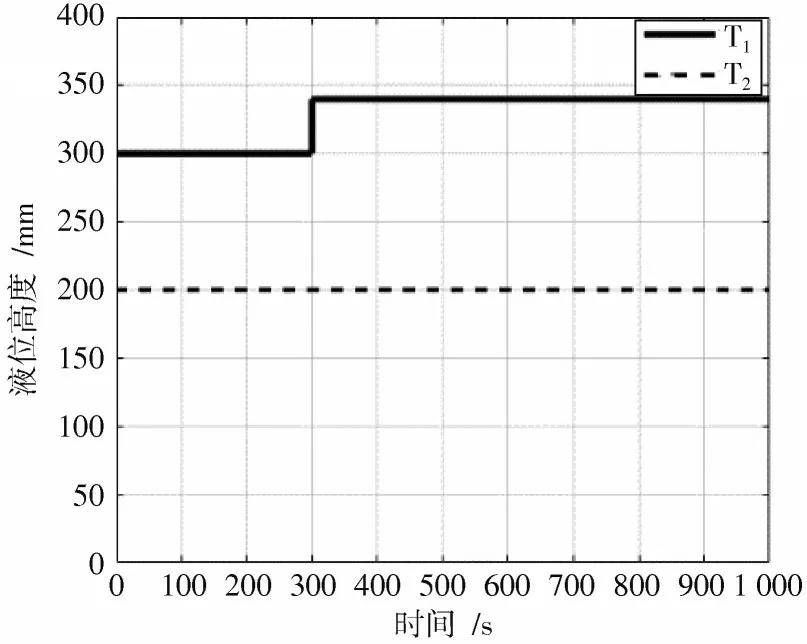
图10 水箱T1和T2的目标液位
阀门的参数、开启/关闭的pos、值如表1所示。
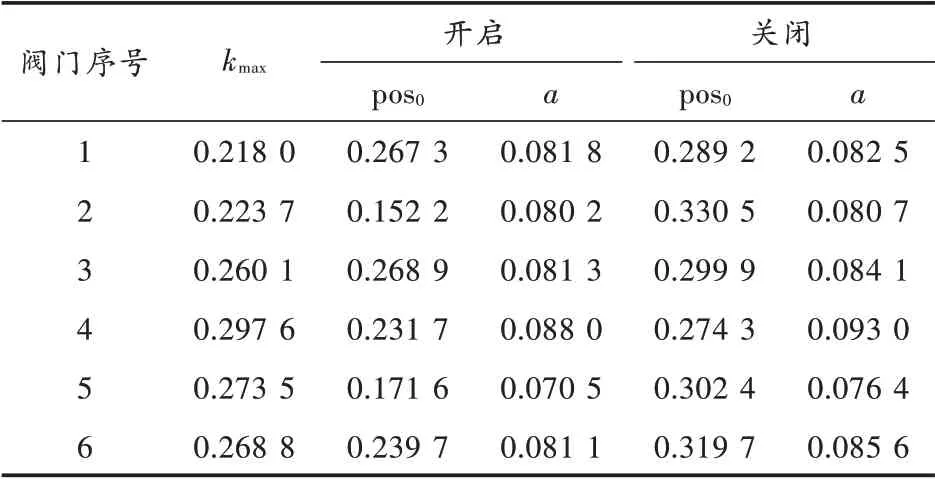
表1 阀门开关状态的参数
位置用Matlab单位[MU]表示,阀门的全开全闭状态和阀门开关信号状态如表2所示。
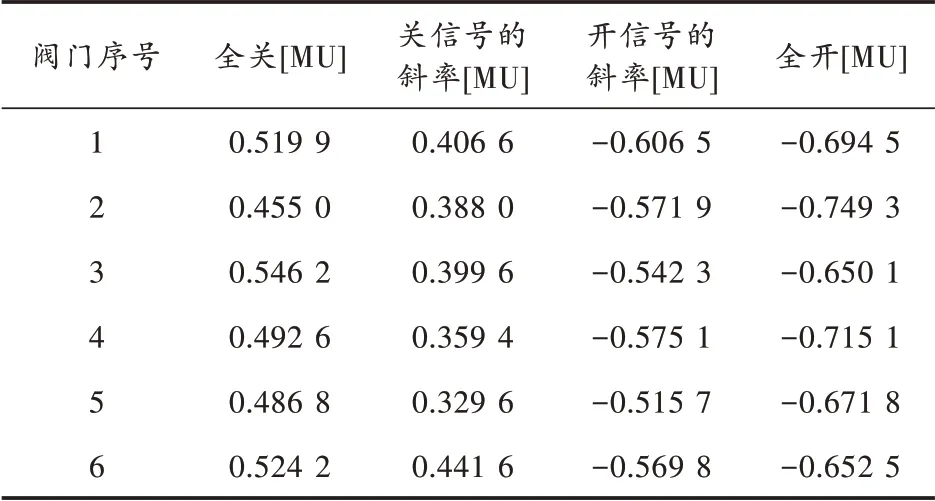
表2 阀门关键状态的位置
当关闭解耦器时由于单个输出量受到了两个输入量的影响,导致输出量达到目标输出量时会产生波动,达到稳定的时间也会变长,仿真结果如图11所示。
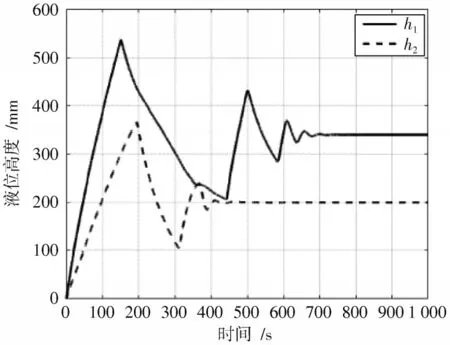
图11 没有解耦的PID控制
当打开解耦器时,单个的输出量只受到单个输入量的影响,各输入量、输出量之间不会产生耦合,达到目标输出量的过程平稳,不会产生较大的波动,准确性高,仿真结果如图12所示。
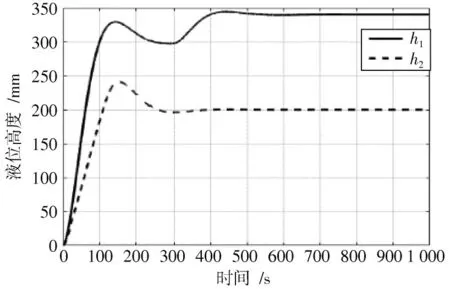
图12 经过解耦的PID控制
因此设计出的解耦器能够实现解耦控制,基于解耦算法的三容水箱控制系统能够很好地完成快速、准确、稳定地达到目标液位的目的。
5 结 语
本文对于DTS200三容水箱进行了数学建模,采用了非线性的解耦算法对水箱输入量水泵流速和输出量液位高度进行解耦,实现了对三容水箱系统液位的精确控制,实验结果说明了本文所设计的解耦器对三容水箱的非线性耦合系统能够有效控制,非线性解耦算法可以推广应用到更多耦合系统中去。
猜你喜欢
流程工业(2022年3期)2022-06-23
煤气与热力(2021年3期)2021-06-09
测控技术(2018年9期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
电子制作(2017年19期)2017-02-02
工业设计(2016年11期)2016-04-16
小雪花·成长指南(2015年10期)2015-10-23
汽车维护与修理(2015年2期)2015-02-28
机电信息(2015年3期)2015-02-27
中学科技(2014年11期)2014-12-25