BDS-3 精密单点定位在铁路勘测中的应用研究
2022-10-10 02:03王国祥郑子天潘佩芬
铁路计算机应用 2022年9期
朱 昀,冯 威,王国祥,郑子天,潘佩芬
(1.西南交通大学 地球科学与环境工程学院,成都 611756;2.中铁二院工程集团有限责任公司 测绘工程设计研究院,成都 610031;3.中国铁道科学研究院集团有限公司 电子计算技术研究所,北京 100081)
全球卫星导航系统(GNSS,Global Navigation Satellite System)具有高精度、全天候和高效率等技术特点,已成为铁路建设中的重要技术手段[1-2]。其中,基于载波相位观测值的实时动态差分定位技术(RTK,Real-Time Kinematic)及相对定位技术在铁路建设中均得到了广泛应用[3]。RTK 和相对定位技术需要多台GNSS 接收机同步工作,在一些偏远地区或地形复杂艰险的山区,其应用会受到一定限制。经过20 余年发展起来的精密单点定位(PPP,Precise Point Positioning)技术采用单台GNSS 接收机,无需架设基站,即可灵活、高效地实现全球范围内的高精度定位[4-5],该技术的出现为铁路勘测提供了一种新的选择。
北斗卫星导航系统(BDS,BeiDou Navigation Satellite System)是我国自主建设运行的全球卫星导航系统。第三代北斗卫星导航系统(BDS-3)于2020年7 月31 日正式建成开通,并向全球用户提供导航定位服务,BDS-3 由3 颗地球静止轨道(GEO)卫星、3 颗倾斜地球同步轨道(IGSO)卫星和24 颗中圆地球轨道(MEO)卫星组成[6-7],提供B1I、B3I、B1C、B2a 和B2b 共5 个频率的信号。刘生峰等人[8]对BDS-3 共4 种双频组合进行PPP 静态解算发现,不同双频组合的点位精度在分米级;陈哲正等人[9]联合BDS-2 与BDS-3 形成7 种双频组合并进行静态PPP 分析,结果表明,所有组合定位精度在厘米级。当前,BDS-3 已建成开通,系统定位性能得到了较大提升,但对采用非差非组合观测模型的BDS-3 的PPP 性能分析及其在铁路勘测场景下的应用和研究相对较少。
因此,为推动BDS-3 PPP 在铁路勘测领域的应用,本文推导了BDS-3 任意双频非差非组合PPP 函数模型,用其对BDS-3 卫星B1I、B3I、B1C 和B2a信号形成的5 种双频组合进行PPP 解算和结果分析,并基于国内某铁路控制点观测数据进行BDS-3 PPP解算,分析其在铁路勘测中应用的可行性。
1 BDS-3 双频非差非组合模型
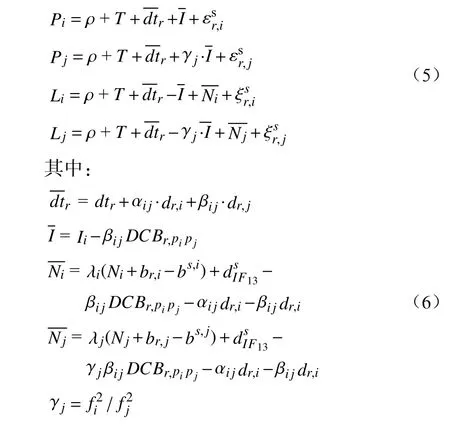
相比于传统双频消电离层PPP 模型,非差非组合模型具有估计电离层延迟参数和利于多频多系统数据处理等优势,吸引了众多学者对其研究。通常,伪距P和载波相位L初始观测方程可表示为

其中,i是信号频点;r和s分别表示接收机和卫星;Pi和Li分别是频点i的伪距和载波相位观测值;ρ是卫星与接收机之间的几何距离;T是对流层延迟;dtr和dts分别是接收机和卫星钟差;Ii是频点i的电离层延迟;λi是频点i的载波波长;Ni是频点i的载波整周模糊度;dr,i和ds,i分别是频点i的接收机和卫星端的伪距硬件延迟;br,i和bs,i分别是频点i的接收机和卫星端的相位硬件延迟;分别是频点i的伪距和载波相位观测值的未模型化误差及观测噪声之和[10]。
为方便表述,定义以下表达式

其中,fi和fj分别是频点i和j的频率;αij和βi j是频率相关的放大因子表示频点i和j的伪距硬件延迟差异(DCB,Differential Code Bias)。
目前,国际GNSS 服务中心(IGS,International GNSS Service)提供的BDS-3 精密钟差产品是以B1I和B3I 频点的消电离层组合电子相位中心为参考基准,其表达式为

在利用BDS-3 信号进行PPP 计算时,先对各频点上伪距观测值进行卫星端DCB 改正。BDS-3 的卫星DCB 产品可通过中国科学院或德国宇航中心获得。式(1)经过精密钟差和卫星DCB 改正后可整理为

其中,dr,i可同时被接收机钟差和电离层参数吸收,相位硬件延迟与模糊度具有强相关性,且通常具有极高的时间稳定性,相位延迟可被模糊度完全吸收[11]。通过参数规整可得,利用BDS-3,任意频点i和j的非差非组合函数模型为
2 BDS-3 PPP 结果分析
2.1 实验数据
本文选取了12 个的IGS 多系统监测站(简称:测站)2021 年5 月3 日—9 日共7 天的观测数据,对BDS-3 的B1I、B3I、B1C 和B2a 信号形成的B1I/B3I、B1C/B2a、B3I/B1C、B3I/B2a 和B1I/B2a 5种双频组合进行PPP 静态和仿动态解算和性能分析。BDS-3 中3 颗GEO 卫星没有播发B1C、B2a 信号,本文只使用了BDS-3 中的3 颗IGSO 卫星、24 颗MEO 卫星的观测数据。精密星历和精密钟差来自武汉大学分析中心,DCB 产品来自中国科学院,测站参考坐标来自IGS 周解文件。PPP 三维收敛时间定义为E、N、U 方向坐标偏差均小于1 dm 并至少连续保持20 个历元所需的时间。
位置精度因子(PDOP,Position Dilution of Precision)是用来衡量观测卫星空间分布的几何强度因子,卫星空间几何分布越好,PDOP 值越小。本文对所选12 个测站2021 年5 月3 日的观测数据对BDS-3 的卫星可见数和空间分布几何强度进行分析,结果如图1 所示。图1 中横轴分别列出了所选12 个测站的站名,各测站的可见卫星数平均值均不少于8 颗,PDOP 平均值在2.0 左右;各测站BDS-3 卫星可见数较多且具有良好的空间几何分布。
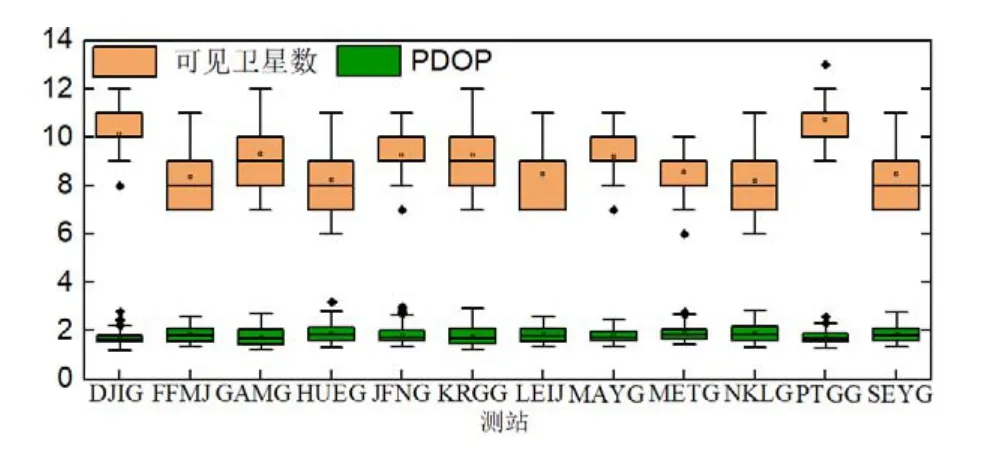
图1 12 个测站可见卫星数和PDOP 值分布
2.2 静态解算结果分析
图2 给出了5 种双频组合各测站连续7 天单天静态解算结果在E、N、U 方向的均方根误差(RMSE,Root Mean Squared Error)平均值。表1 和图3 给出了5 种双频组合下12 个测站连续7 天单天静态解算结果的RMSE 平均值。从图2 中可看出,在水平方向上,大多数测站在5 种双频组合下都能收敛到3 cm 以内;在高程方向(U 方向)上,B3I/B1C、B3I/B2a 组合的定位精度较差,其中,部分测站RMSE 大于8 cm,其余3 种组合的定位精度基本一致,均能收敛到4 cm 以内。总体来说,B1I/B3I 模式的定位精度最高,主要因为其与生成BDS-3 精密产品所用信号相同;B3I/B2a 模式的定位精度最差,主要因为B3I 与B2a 信号频率比较接近而导致的观测方程病态性问题。

表1 5 种双频组合12 个测站静态解平均RMSE 和收敛时间
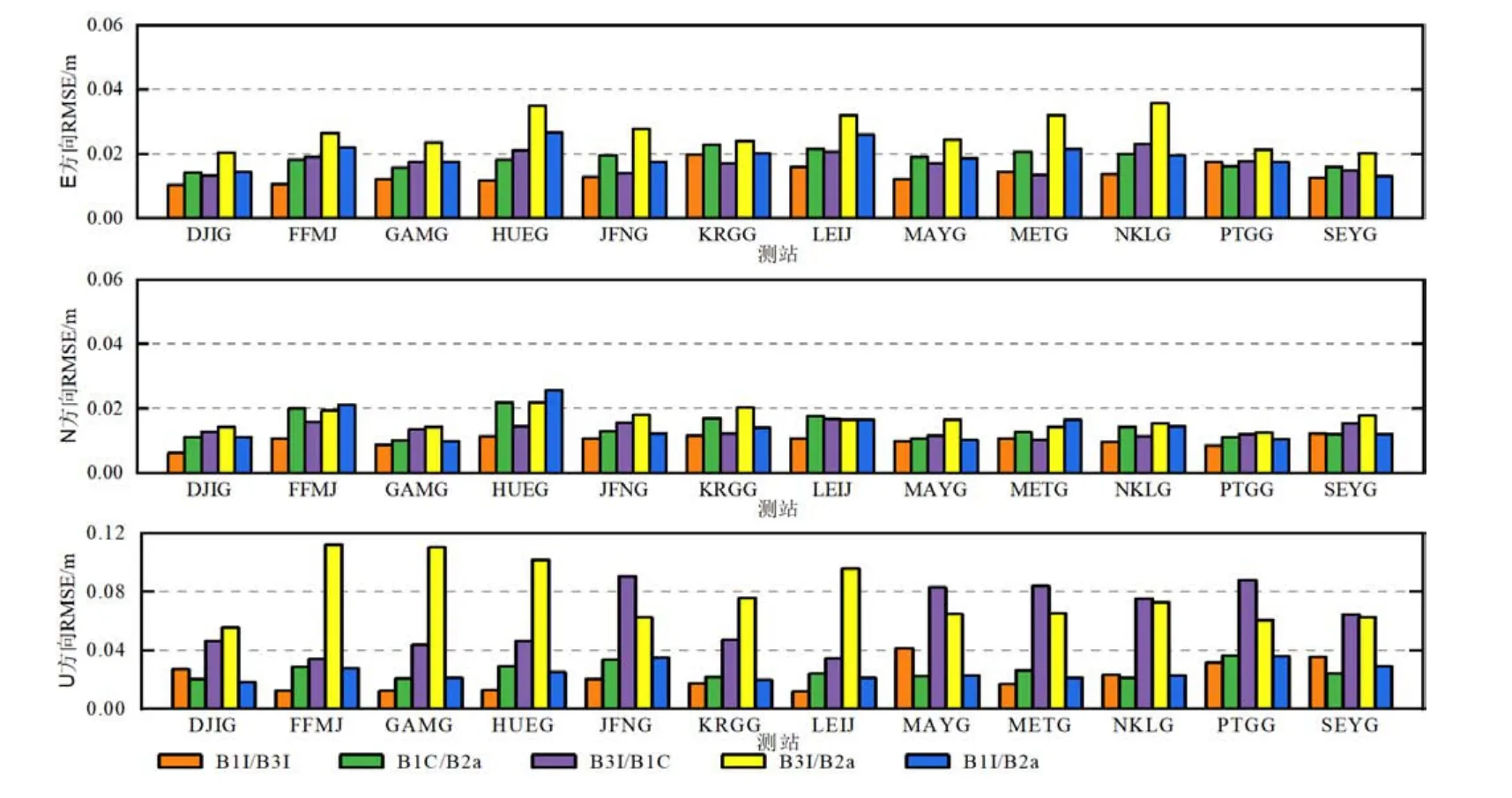
图2 5 种双频组合下12 个测站单天静态解平均RMSE
由表1 可知,在5 种双频组合中,B1I/B3I、B1C/B2a 和B1I/B2a 均能实现水平方向(E 或N 方向)优于2 cm,高程方向优于2.6 cm 的定位精度,收敛时间分别约为37 min、103 min 和87 min。B3I/B1C和B3I/B2a 的定位精度在水平方向分别约为2 cm 和3 cm,高程方向分别约为6.2 cm 和8.0 cm,收敛时间分别约为72 min 和205 min。除B1I/B3I 组合的收敛时间较短外,其余4 种组合的收敛时间均相对较长,其原因是非差非组合模型中未知参数相关性更高,更易受到误差改正的影响。我国现行规范《数字航天摄影测量-控制测量规范》对PPP 技术用于航测像控点定位时,要求PPP 定位坐标与国家D级GNSS 点或大地控制网点坐标的互差在水平方向≤0.20 m,高程方向≤ 0.22 m。BDS-3 这5 种双频组合在水平和高程方向定位精度均优于0.1m,满足规范要求,均可用于铁路航测中像控点的布设。
2.3 仿动态解算结果分析
因静态模拟动态实验中,测站静态观测数据质量更高,其解算结果可有效反映动态PPP 的最佳性能,因此,本文采用静态模拟动态的方法评定5 种双频组合动态PPP 定位性能。图3 给出了5 种双频组合下各测站连续7天动态解在E、N、U 方向的RMSE平均值。表2 给出了5 种双频组合下12 个测站连续7 天动态解的RMSE 和收敛时间平均值。从图3 可看出,除少数测站外,B1I/B3I、B1C/B2a、B3I/1C 和B1I/B2a 这4 种组合各站在水平方向的定位精度优于10 cm,高程方向优于15 cm;B3I/B2a 的定位精度最差。
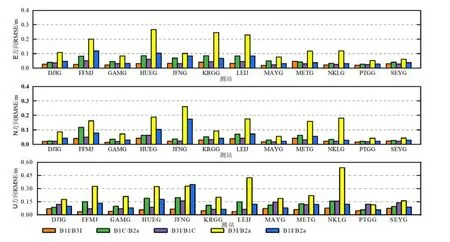
图3 5 种双频组合下12 个测站动态解平均RMSE

表2 5 种双频组合12 个测站动态解平均RMSE 和收敛时间
由表2 可知,除B3I/B2a 组合外,其余组合均能实现水平方向优于6 cm,高程方向优于15 cm 的定位精度。同静态解算结果一样,B1I/B3I 的定位性能最好,B3I/B2a 的定位性能最差,其主要原因与静态定位结果一致。在铁路勘测中采用GNGS RTK 进行地形测量时,我国现行《铁路工程测量规范》要求测量点坐标与已知点坐标在水平方向互差不大于图上0.2 mm,高程方向互差不大于1/5 基本等高距,当对规范中最大比例尺为1∶500,基本等高距为1 m的地形图进行测量时,可知其定位坐标精度要求为水平方向≤0.1 m,高程方向≤0.2 m。综上,BDS-3 PPP 动态定位精度满足规范要求,为其在铁路数字地形测量中的应用提供了可能。
2.4 铁路场景下实例分析
为进一步验证在铁路场景下BDS-3 PPP 的可用性,随机选取国内某铁路中一个控制点的GNSS 静态观测数据进行实验分析,观测时长约2 h,接收机和天线类型分别为Trimble R12 和 TRMR12 NONE。采用B1I/B3I 频率及本文推导的非差非组合模型进行PPP 解算。图4 给出了该控制点BDS-3 卫星可见数与PDOP 值。由图4 可知,其观测时段内可见卫星数约为8~12 颗,PDOP 值约为2.0,说明在真实铁路场景下,BDS-3 可见卫星数较多且具有良好的空间几何分布,可用于PPP 获取高精度位置信息。
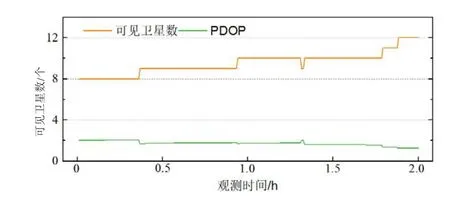
图4 控制点卫星可见数与PDOP 值
图5 给出了控制点分别在静态和仿动态模式下的定位误差序列和不同观测时长的定位精度,图5中红色虚线位置代表收敛时间。由图5 可知,该控制点静态和仿动态PPP 收敛时间分别约为27 min 和44 min,在收敛阶段,定位精度相对较差,但在收敛后,3 个方向的定位偏差序列波动较小且均优于10 cm;静态和仿动态定位在观测时长为30 min 时,各方向定位偏差均优于20 cm,观测时长超过1 h 后,各方向均能实现优于10 cm 的定位精度。综上,相比于传统相对定位技术,利用我国BDS-3 系统进行精密单点定位能实现厘米级的定位精度,且其定位精度不受测区范围限制、单机作业更具灵活性,并具有全天候的可见卫星数和空间几何分布的高可用性。可见,BDS-3 PPP 技术在铁路勘测领域具有较好的应用前景。
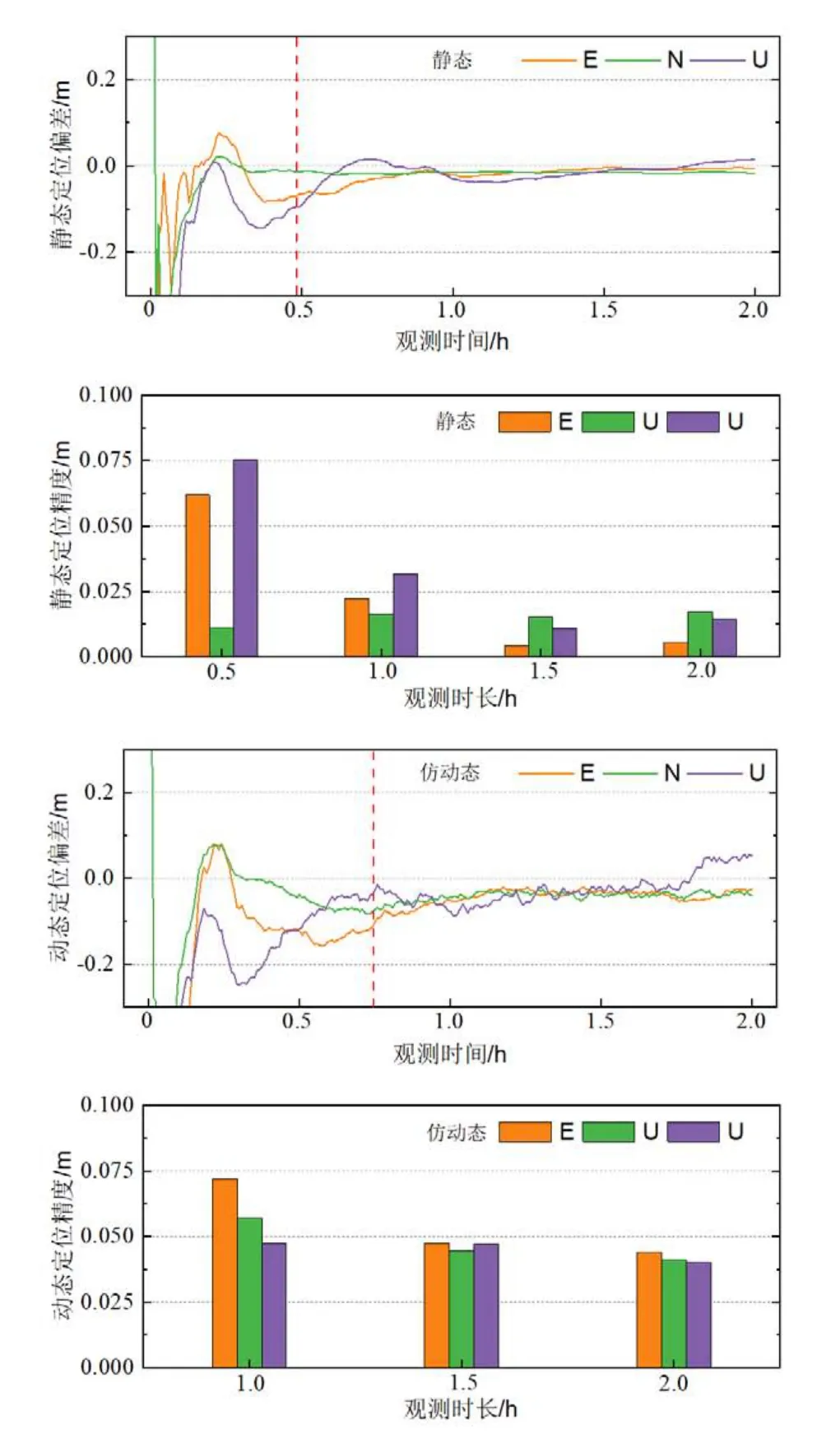
图5 控制点静态(左)和仿动态(右)定位偏差序列及不同观测时长定位精度
3 结束语
随着我国BDS-3 的建成和开通,以及全球范围内北斗可见卫星数的增加,北斗在铁路勘测中的应用也越来越广泛。本文针对BDS-3,分别从卫星可见数、PDOP 值及PPP 定位性能等方面研究了BDS-3 PPP 在铁路勘测中应用的可行性。结果表明,在观测时段内可见卫星数均相对较多且具有良好的空间几何分布,为北斗卫星高精度定位提供良好的观测条件;无论是PPP 静态还是仿动态解算,均可实现在水平和高程方向的厘米级定位精度,当其应用于铁路勘测中航测像控点的布设或数字地形图的测量时,均满足我国相关现行规范精度要求。基于BDS-3 的精密单点定位技术将为卫星导航定位系统在铁路勘测中的应用提供一种新的选择。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
测绘地理信息(2022年2期)2022-04-02
中国新通信(2020年3期)2020-07-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
演艺科技(2018年1期)2018-07-18
发明与创新·大科技(2017年9期)2017-09-14
通信产业报(2016年46期)2017-03-10
移动通信(2014年18期)2014-11-04