基于螺距约束和HPSOGA算法的六自由度焊接机器人路径规划
2022-10-09 00:58:52掌俊玮张礼华蒋雨洋李家富李晨洁
江苏科技大学学报(自然科学版) 2022年4期
掌俊玮,张礼华,蒋雨洋,李家富,李晨洁
(江苏科技大学 机械工程学院 镇江 212100)
在焊接作业中,大多焊接接头以不规则的分布呈现,而机器人对焊点次序的选择,将会影响其焊接效率[1].传统的路径规划方法往往依赖于人工规划,很难保证最优解,容易导致耗时长、生产率降低等一些问题[2].智能算法能够提供一种有效的方法避免人工规划,进而获取最优解.遗传算法(GA)和粒子群算法(PSO)是这类智能算法中的典型代表[3-6].遗传算法是一种并行的、随机的全局搜索优化方法,选用继承、突变和交叉等生物学技术,模拟生物进化机制的迭代过程,具备较强的适应性和较为优异的计算性能等优点.粒子群算法由于简单、容易实现,且参数较少,在实数编码问题上具有良好的性能[4].将遗传算法和粒子群算法进行恰当的混合,不仅可以提高粒子群的算法的粒子多样性,还可以保留变异操作,优化遗传算法的全局搜索能力.文献[7]在粒子群算法中下一代粒子的生成中引入遗传算法提高粒子多样性,设计了HPSOGA算法解决机器人的逆运动学求解问题,具有较好的性能.文献[8]在解决机器的调度优化问题时,通过聚类将GA算法和PSO算法结合,当GA算法被先执行时,能够有效提高HPSOGA算法的全局搜索能力. 在文献[9]中,将HPSOGA算法用于解决焊接机器人的路径规划问题,并表明HPSOGA算法具有较强的搜索能力和实用性.受文献[10]启发,在翅片管与汇集箱的焊点路径规划问题中,引入螺距约束进行描述多个翅片管焊点间的关系,并设计了带有螺距约束的HPSOGA算法,搜索机械臂的焊接最短路径.
1 机械臂动力学分析
在翅片管和汇集箱的焊接问题中,根据对焊接工艺的分析,选用六自由度机械臂.如图1,将六自由度机械臂放入D-H坐标系,进行动力学分析,得到六自由度机械臂的D-H参数,如表1:αi-1、ai-1、θi-1分别为连杆的扭角、长度、转角,di-1为关节距离.
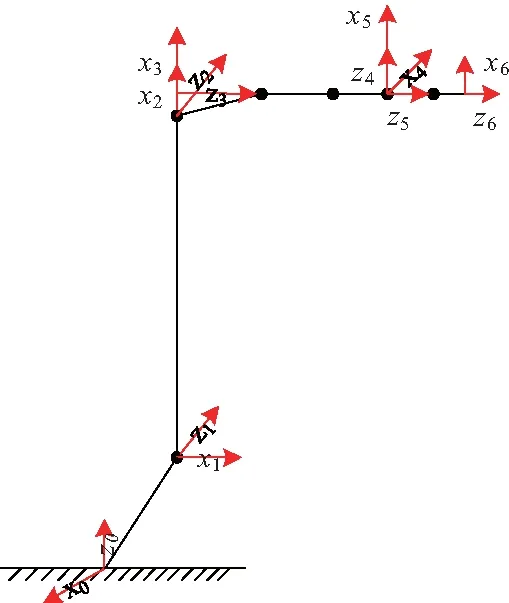
图1 机械臂D-H坐标系
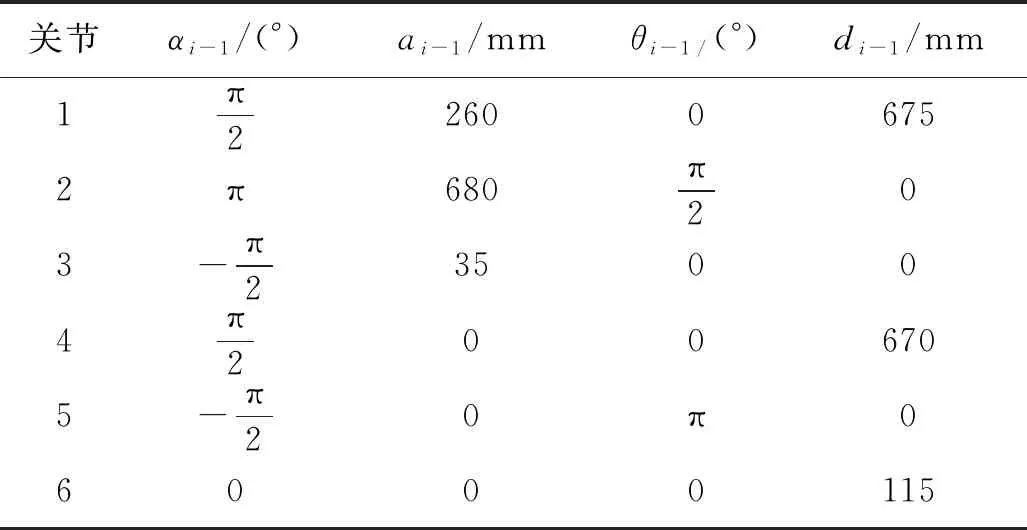
表1 焊接机械臂的D-H参数
设机械臂节点i的坐标系{i}变换到机械臂节点i-1坐标系{i-1}的矩阵记为i-1Ti,则节点i到节点i-1的变换矩阵可以描述为:
i-1Ti=R(xi-1,αi-1)T(xi-1,ai-1)R(zi-1,θi)T(zi,di)=
(1)
式中:R(xi-1,αi-1)为绕xi-1转动αi-1角的矩阵;T(xi-1,ai)为沿着xi-1移动ai-1的矩阵;R(zi,θi)为绕着zi转动θi角的矩阵;T(zi-1,di)为沿着xi-1移动ai-1的矩阵.
设机械臂末端位姿的变换矩阵为0T6,可以描述为:
0T6=0T1·1T2·2T3·3T4·4T5·5T6=
(2)
其中,
将设计的焊接机械臂的D-H参数带入式(2),根据正运动学矩阵变换关系,机械臂位于空间中某一种位姿时,可以计算每个关节的角度值,进而可以确认出位姿矩阵0T6的具体参数,求解机械臂末端位姿.
2 基于HPSOGA算法的路径规划
2.1 问题描述
螺距是指两螺旋线上对应点间的距离.在焊接工件时,第i根翅片管与汇集箱的焊接轨迹i以及第i+1根翅片管与汇集箱的焊接轨迹受螺距约束,如图2.

图2 工件焊接时轨迹间的螺距
(3)

(4)
式中:c=cos(angle),s=sin(angle),angle为矢量(x,y,z)的正向看去逆时针旋转得到的角度,且矢量(x,y,z)必须是单位化且经过原点.

(5)
式中:r为机械臂的半径;n为焊点P的法向量在机械臂平面上的投影矢量,且是单位向量.
考虑第i根翅片管与汇集箱的焊接任务P={Pi},则第i根翅片管与汇集箱的焊接轨迹i以及第i+1根翅片管与汇集箱的焊接路径可以描述为:
(6)
则机械臂的路径规划的目的时,搜索最短的焊接头序列,使得机械臂在起始焊点到目标焊点的总路径最小.当焊接路径为Path时,机械臂的焊接距离f(Path)可以描述为:
(7)
2.2 基于HPSOGA算法的焊接路径规划
在传统的PSO算法中,粒子状态在t时刻的更新过程可以描述为:
(8)
式中:ω为惯性权重;C1和C2为学习因子;r1和r2为0~1间均匀分布的随机数;i为粒子索引.
随着时间的增长,每个粒子会不断的更新局部最优解pbest和全局最优解gbest,逐渐会收敛到pbest或gbest.当pbest和gbest陷入局部最优解后,则粒子最终也将陷入局部最优解,很难获得真正的全局最优解.基于此,同时采用GA算法来搜索全局最优解gbestGA,当PSO算法陷入局部最优解时,将GA算法获取的gbestGA,作为全局最优解更新粒子状态,因此HPSOGA算法中的粒子状态更新过程可以设计为:
(9)
式中:GA(k)为第t时刻迭代时的采用GA算法获取的全局最优解;r1、r2、r3服从均匀分布[0,1].
在实际中,工程问题往往是离散的.为了解决翅片管与汇集箱的焊接路径规划问题,借鉴文献[11],引入交换算子和交换序列,将HPSOGA算法中的粒子的更新过程式(9)进行离散化,可得:
(10)
(11)

(12)
式中:D为粒子群的长度.
3 仿真实验
仿真采用六自由度机械臂焊接翅片管与汇集箱,如图3,在matlab导入solidwork模型进行仿真,假设机械臂在初始位置的关节角度q0=[π/2,-π/2,0,0,0,0],则机械臂的末端位姿0T6根据运动学求解可得:

图3 六自由度机械臂初始位置
为了便于对比,分别采用PSO算法、GA算法、HPSOGA算法求解翅片管与汇集箱的最优焊接路径,其初始参数设置:
PSO算法的粒子数目为2 000个迭代次数设为1 000次,GA算法的种群数目为2 000个,迭代次数为1 000代,在HPSOGA算法中,PSO的迭代次数为40,GA的迭代次数为200.同时,GA算法和HPSOGA算法中的交叉概率取0.93,
变异概率取0.06,PSO算法和HPSOGA算法的学习因子取C1=1.496 2、C1=0.582 5,分别运行3种算法20次,对实验结果进行加权平均处理.图4为3种算法的收敛速度曲线,可以看出HPSOGA的收敛速度最快,当达到值时,获取最优解;PSO算法的收敛速度要微快于GA算法.
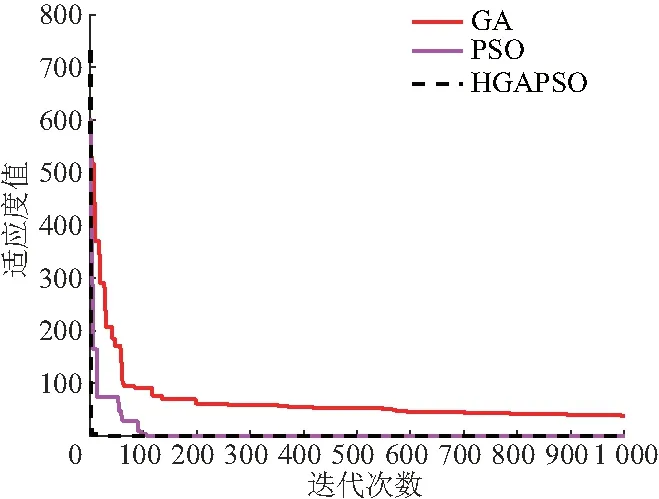
图4 3种算法的收敛速度
图5为HPSOGA算法获得的较好焊接路径.

图5 HPSOGA路径规划结果
4 结论
(1) 对六自由度机械臂进行动力学分析,建立六自由度机械臂的动力学模型,并求解其D-H参数.
(2) 在解决带有螺距约束的焊接问题中,将遗传算法和粒子群算法进行恰当的混合,提高粒子群算法的粒子多样性,通过变异操作优化遗传算法的全局搜索能力,并运用交换算子和交换序列对粒子状态的更新过程进行离散化.
(3) 在matlab中导入solidworks模型,搭建算法仿真平台,分别采用PSO算法、GA算法、HPSOGA算法进行路径搜索,经过多次实验表明,在本文所设计的算法下,机械臂能够获得较为平滑的焊接轨迹,且焊点路径最短,进而验证了该算法的有效性和正确性.
猜你喜欢
内江科技(2022年3期)2022-03-30 10:24:50
制冷(2019年2期)2019-12-09 08:10:36
机械工程师(2018年7期)2018-07-30 09:05:26
制冷技术(2016年3期)2016-12-01 06:53:19
工业设计(2016年5期)2016-05-04 04:00:48
焊接(2016年2期)2016-02-27 13:01:14
中国卫生标准管理(2015年4期)2016-01-14 05:43:52
天津城建大学学报(2015年5期)2015-12-09 01:26:56
华东理工大学学报(自然科学版)(2015年4期)2015-12-01 04:00:42
制冷学报(2014年1期)2014-03-01 03:06:35