北斗导航定位系统(BDS)下地壳运动监测精度分析
2022-10-03 12:08:46刘洋洋邵银星
地震地磁观测与研究 2022年3期
刘洋洋 李 瑜 邵银星 祝 杰
(中国北京 100045 中国地震台网中心)
0 引言
20 世纪80 年代以来,以美国全球定位系统(GPS)为代表的卫星导航系统迅速发展,随着定位精度的大幅度提升,卫星导航系统被广泛应用于地球动力学相关领域,为监测区域性、全球性的地壳运动提供了精确的量化数值指标。目前GPS 监测板块运动和地壳形变的精度为:水平方向1—2 mm/a,垂向2—4 mm/a。我国自主研发的北斗导航定位系统(BDS)历经3 个阶段:北斗一代为实验验证系统,共布置4 颗卫星,具备区域定位能力;二代共布置20 颗卫星,2012 年组网,具备亚太地区定位能力;三代共布置35 颗卫星,2020 年底完成组网,具备全球定位能力。本研究利用北斗二代数据进行解算。北斗二代系统精密单点定位(Precise Point Positioning,PPP)精度为水平向8 mm、垂向20 mm。及时开展BDS 在监测板块运动、地壳形变领域的研究非常有必要,而借鉴GPS 的研究成果,能更好的比对BDS 的监测精度,同时进一步推动BDS 在防震减灾工作中的应用。
国内外学者在BDS 系统定轨、定位等方面做了大量研究探索,如:施闯等(2012)利用PANDA 软件,解算“北斗卫星观测试验网”数据,表明BDS 的PPP 精度达到cm 级;Li等(2014)开展了BDS、GPS 融合定位研究,发现在系统融合情况下,能够减少BDS-PPP收敛时间,且定位精度达到cm 级;朱永兴等(2015)等研究了北斗系统静态、动态PPP 精度;Geng 等(2016)的研究显示,BDS、GPS 融合定位在获取地表强震运动速度能力方面较单独的GPS 动态定位有所提升;张彩红等(2015)对Bernese 进行二次开发并解算北斗数据,表明BDS-PPP 和GPS-PPP 精度存在cm 级差异;王广兴等(2016)利用陆态网络站分析了北斗卫星观测值的相关特性;王阅兵等(2018)分析了BDS-PPP 在地壳运动监测中的应用,验证了BDS 用于监测形变量较大区域性地壳运动的可行性;李良发等(2020)、王坦等(2021)利用GAMIT 解算了部分陆态网络北斗站点,结果显示BDS 静态相对定位在水平方向上满足亚cm 级监测需求,垂向满足cm 级监测需求;任静等(2020,2021)为未来适时开展BDS 在地震预警及烈度研究领域的应用提供了借鉴。
以上研究进展多集中在BDS 定位、定轨精度分析,缺少对BDS 定位及地壳运动应用的系统的定量研究,以及综合不同指标对BDS 与GPS 精度差异的定量考量,指标包括三维坐标解、时间序列及速度场,且BDS 在地壳监测领域的应用成果相对较少,现有成果待完善。故以川滇地区为研究区,以中国大陆构造环境监测网络(陆态网络)北斗站(北斗二代信号)记录数据进行区域地壳运动监测研究,分析评估BDS、GPS 精度差异,分析BDS 在地震地壳运动监测中的精度,并与GPS 监测地壳运动精度对比。
1 数据选取与解算设置
以川滇地区为研究区域利用陆态网络2018—2019 年的观测数据,对GPS、BDS 数据进行单独处理,并分别平差得到位置解、时间序列、速度场模型等结果,分析BDS 精度及与GPS 的差异。测站包括陆态网络站点(SCDF、SCGU、SCGZ、SCJU、SCYY、YNHZ、YNLC、YNMJ、YNRL、YNSD、YNSM、YNXP、YNYA、YNYL、YNYS、YNZD)及中国大陆周边IGS、MGEX 站(USUD、ULAB、URUM、TSKB、STK2、TSK2、SUWN、SHAO、POL2、MIZU、HKSL、JOG2、KARR、TWTF、JFNG、WUH2、LHAZ、HYDE、GMSD、CCJ2、CHAN、BADG、AIRA)。
利用GAMIT 10.71 版本,处理陆态网站基准站的BDS 和GPS 观测数据,其中,解算采用相同模型及参数,参数设置见表1。

表1 解算参数设置Table 1 Parameter settings of solution
2 结果对比
2.1 测站坐标解
对BDS、GPS 数据分别进行解算,选择同一坐标系,合并全球H 文件(H 文件是全球共享GNSS 站点的平差文件,文中选取区域性站点,将全球H 文件在平差过程中加入,得到站点在全球坐标系下的坐标结果)平差,得到各测站在BDS、GPS 数据解算方案下的三维坐标结果及精度。提取2 种方案的单方向均方根值(Root Mean Square,RMS),结果见表2。RMS 值越小,代表数据精度越高。
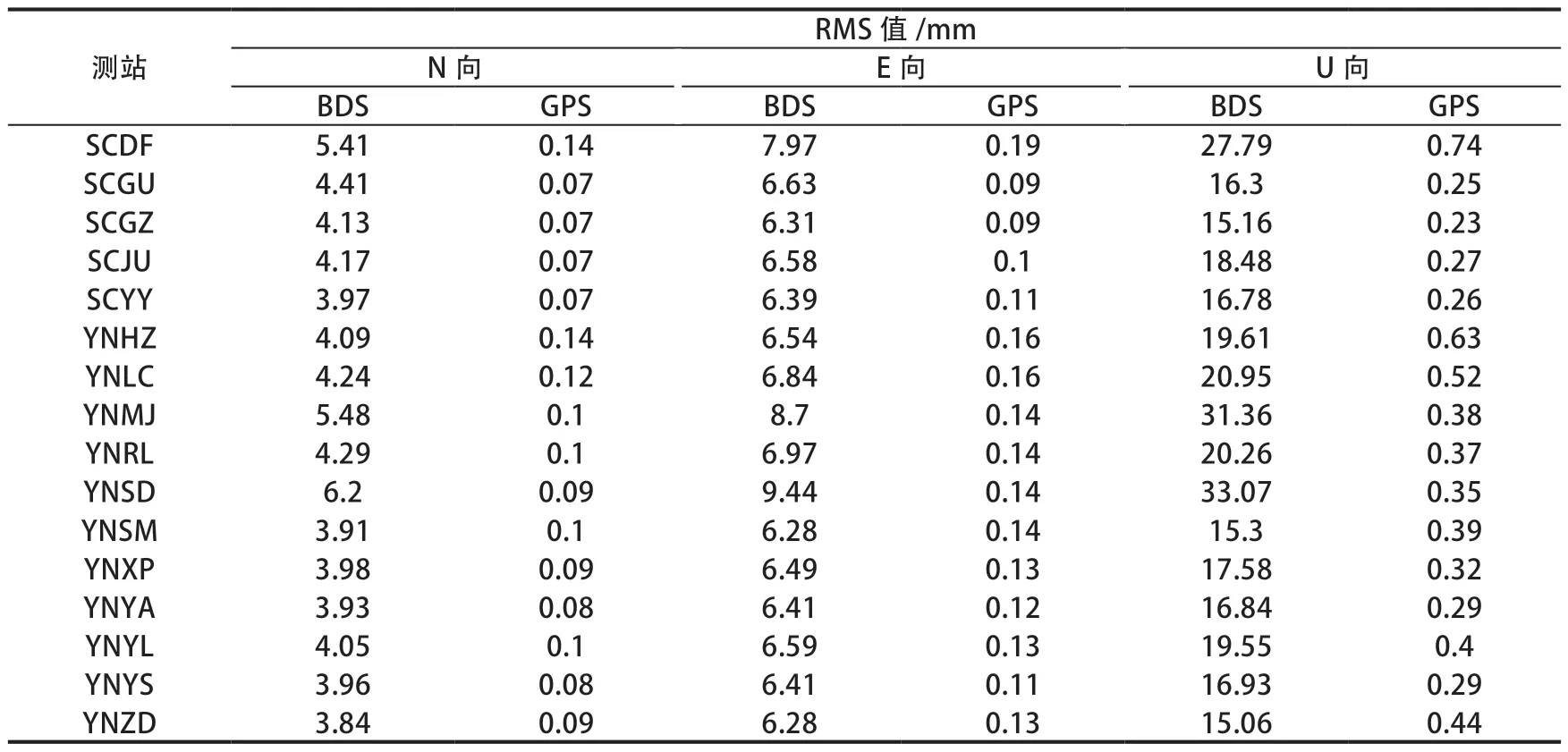
表2 坐标RMS 值对比Table 2 Coordinate RMS value comparison
由表2 可见,2 种系统解算结果相差较为明显,GPS 解算结果的水平向(N 向、E 向)和垂向(U 向)精度均在mm 级,而BDS 解算结果精度则分别在mm 级、cm 级。在BDS、GPS 系统下,全部测站N 向精度均值分别为4.38 mm、0.1 mm,E 向精度均值分别为6.9 mm、0.2 mm,U 向精度均值分别为20 mm、0.4 mm,U 向精度相差最为明显。就定位精度而言,GPS 优于BDS,但BDS 系统下解算的各测站位置精度相差不明显,间接说明BDS 解算结果的稳定性。在静态测量中,BDS 二代系统也可以满足水平方向mm 级定位的精度要求。
2.2 时间序列
对2018—2019 年的解算结果进行时间序列分析,其中站点位置来源于同一坐标系。以云南施甸站(YNSD)为例,基于BDS、GPS 数据(未经滤波的原始数据)解算的时间序列见图1。
由图1 可见,2 系统均具有大趋势变化下不同程度的跳跃,BDS 结果更分散,趋势一致性较弱。虽然BDS 解算结果在个别时间存在较大变化(已在时间序列中剔除),但总体精度尚佳。以加权均方根误差(weighted root mean square,WRMS)为例,该站点GPS 结果的N、E、U 向WRMS 值分别为3.7 mm、9.2 mm、16.9 mm,BDS 结果的N、E、U 向WRMS 值分别为5.5 mm、8.3 mm、22.2 mm,二者水平向差异较小,垂向差异也在mm 级。简言之,BDS 系统可用于对精度要求不甚高的区域进行监测。
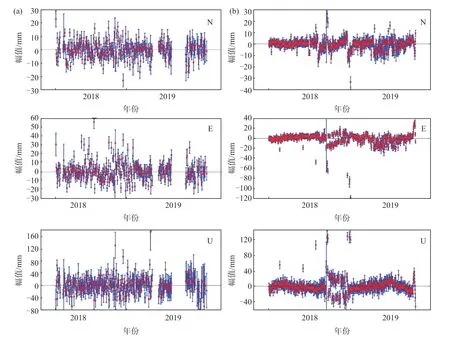
图1 BDS(a)、GPS(b)数据解算的云南施甸站(YNSD)时间序列Fig.1 Time series of YNSD calculated by BDS (a) and GPS (b) data
2.3 速度场模型
通过时间序列文件,得到所选站点在BDS、GPS下ITRF2014框架的速度场结果,见图2。
由图2 可见,BDS、GPS 速度场反映了同一运动趋势,但运动方位和速度值有所不同。图2 中各站点所绘直线代表年运动速度值,BDS 数据解算的水平向速度与GPS数据解算结果差值在1—10 mm 内,其中,E 向差值均值为10 mm,N 向差值均值为3 mm,U 向差值均值为16 mm。同时,BDS 反映的运动方位与GPS 存在差异,GPS 结果较BDS 南偏西约18°。
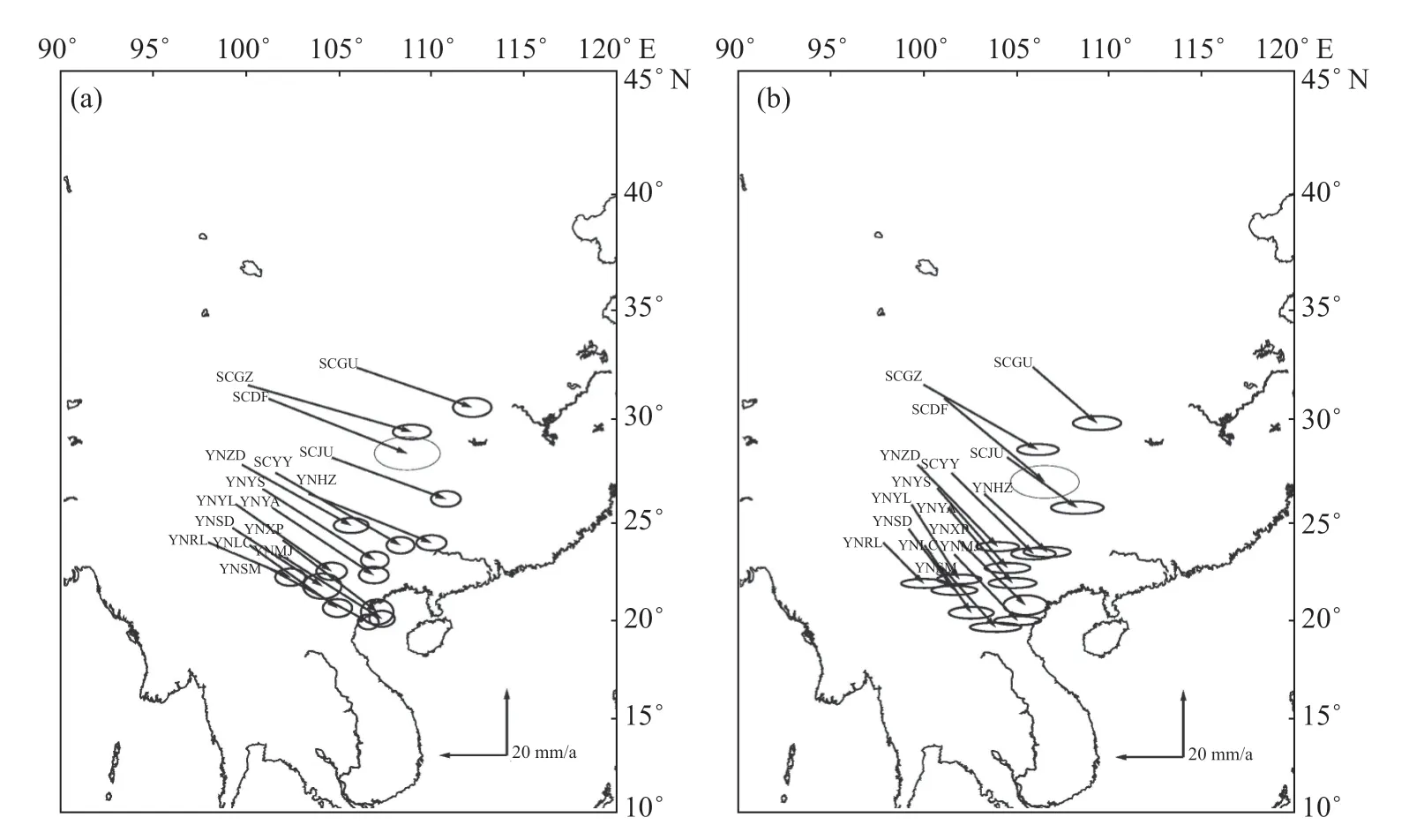
图2 BDS(a)、GPS(b)解算速度场模型Fig.2 Velocity field model of BDS (a)、GPS (b)
3 结论
利用GAMIT 软件,对2018—2019 年川滇地区陆态网络基准站记录的BDS 和GPS数据进行处理,通过分析三维坐标解、时间序列和速度场结果,对2 套系统下地壳运动监测精度进行定量对比。结果表明:在所选站点范围内,BDS 数据的解算精度与GPS 相比略有不足,GPS 水平向和垂向精度均在mm 级,而BDS 则分别在mm 级、cm 级,且BDS和GPS 水平速度场结果相差1—10 mm,垂向相差16 mm。总体来看,北斗二代系统仍满足高精度定位解算的要求,可用于监测形变量较大的区域地壳运动。
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
当代陕西(2019年18期)2019-10-17 01:48:50
电子制作(2019年14期)2019-08-20 05:43:42
国际呼吸杂志(2019年1期)2019-01-28 09:37:02
电子制作(2018年11期)2018-08-04 03:25:38
中国自行车(2017年1期)2017-04-16 02:53:52
故事会(2016年21期)2016-11-10 21:15:15
太空探索(2016年3期)2016-07-12 09:58:47
测绘科学与工程(2016年5期)2016-04-17 06:51:15