基于Abaqus的半弧式伸缩油茶果收集装置关键部件有限元分析
2022-09-30 02:21:18薛晨阳曲振兴汤晶宇纪亚旭向文博徐克生
林业机械与木工设备 2022年9期
薛晨阳, 曲振兴,2,3, 王 东,2,3, 汤晶宇,2,3, 纪亚旭, 向文博, 徐克生,2,3*
(1.国家林业和草原局哈尔滨林业机械研究所,黑龙江 哈尔滨 150086;2.国家林业和草原局林业机电工程实验室,黑龙江 哈尔滨 150086;3.国家林业和草原局林业装备工程技术研究中心,黑龙江 哈尔滨 150086;4.哈尔滨市宾县农村公路事业发展中心,黑龙江宾县150400)
油茶作为我国重要的木本油料作物,近些年随着市场对茶油需求量的增大,油茶种植面积迅速增长,传统人力采收的油茶果收集方式效率低、劳动强度大、成本高,严重制约着油茶产业的发展。本文提出一种柔性半弧式伸缩油茶果收集装置,半弧式伸缩结构作为收集装置的核心,通过独特的弧式伸缩方式,以缩短垂直空间来实现紧凑收集装备目的,使收集装备在油茶复杂立地条件下可以流畅的完成收集工作。半弧式伸缩油茶果收集装置采用两组齿轮—弧形齿条机构实现收集装置的同步伸缩。齿轮—弧形齿条结构作为半弧式伸缩油茶收集装置中的关键部件,在工作中承受着静载荷与动载荷[1],校核半弧式结构强度以符合实际工作要求,是保证收集装置工作连续性的基本前提。对齿轮副接触的强度、刚度等静态特征参数的分析,已经有许多学者做了不同的研究,徐方舟等[2]通过ADAMS对齿轮齿条刚柔耦合啮合分析;周旭辉等[3]通过ADAMS软件对小齿轮齿轮齿条动力学仿真分析;在进行有限元分析时不同网格密度会导致不同误差出现,符双学等[4]论述了减小因网格密度不同导致数据误差的必要性。在对接触问题进行有限元分析时,通过SolidWorks三维建模并将三维模型导入到Abaqus中进行有限元分析,通过对得到的应力应变云图进行分析验证半弧式结构的合理性[5-8]。
1 半弧式伸缩油茶果收集装置结构设计
以安徽巢湖的油茶[9]为例,通过与巢湖联合农业有限公司合作以随机采样的方式对实验田进行油茶林参数测定。得到油茶树平均冠层直径1.8 m,单树油茶果平均产量10 kg,树行间距3 m,株间距3 m。弧形齿条模数6,分度圆直径4 080 mm,弧度(1/4)π,小齿轮模数为6,分度圆直径108 mm,齿轮与弧形齿条的传动比为37,啮合率为1.2,两弧形工作导轨间距0.85 m,收集装置工作面2.2×2.2 m2。
半弧式伸缩结构作为油茶果收集装置的核心部件,包括传动轴(5)、两组齿轮与弧形齿条结构(1、6)、大链轮(7)、限位轮结构(3、4、8、9)、机架(2),齿轮。限位轮3、限位轮8与齿轮6组成一组杠杆机构,使弧形导轨在静止状态与工作状态时始终处于设定的工作位置。
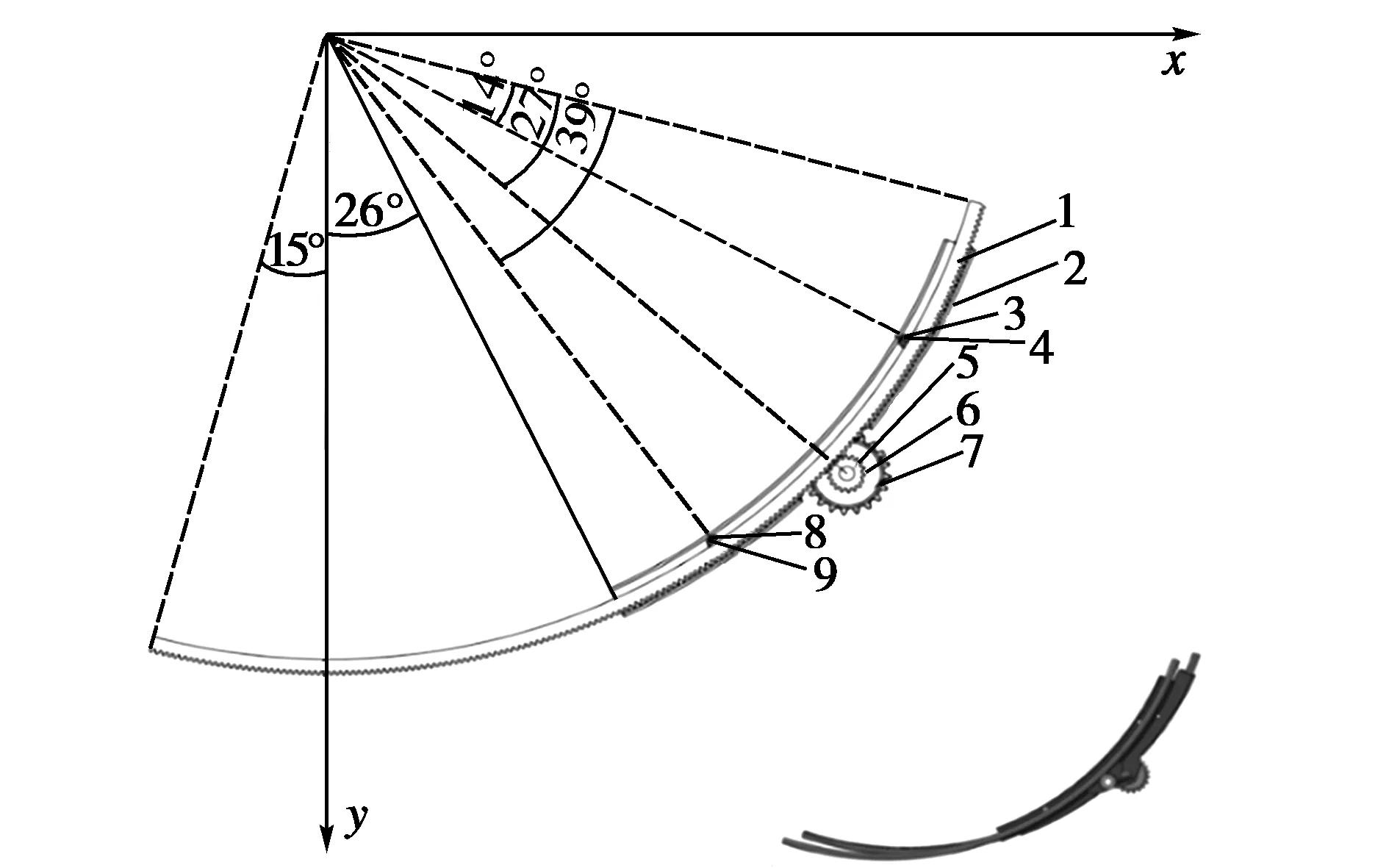
图1 工作位置状态图1.弧形齿条;2.机架;3.限位轮2;4.限位轮轴2;5.齿轮轴;6.齿轮;7.链轮;8.限位轮1;9.限位轮轴1
初始状态时以收集装置弧形导轨的圆心为坐标原点建立坐标系,如图2机架下部与竖直位置的夹角为26°,限位轮2与齿轮的夹角为13°,限位轮1与齿轮的夹角为12°,限位轮1与机架的夹角为10°,工作状态弧形导轨完全伸出,弧形导轨与机架下部的夹角为41°。限位装置(如图3所示)通过限位轮限制弧形导轨在限位面内的跳动,并通过限位轮与齿轮形成的杠杆机构,限制弧形导轨在竖直方向上的跳动,使弧形导轨始终保持在设计要求的跳动范围内。传动轴(如图4所示)上安装有链轮与齿轮,动力通过链轮由电机输送到传动轴上带动两侧的齿轮同时工作,保证两侧的弧形导轨工作时同步伸缩。
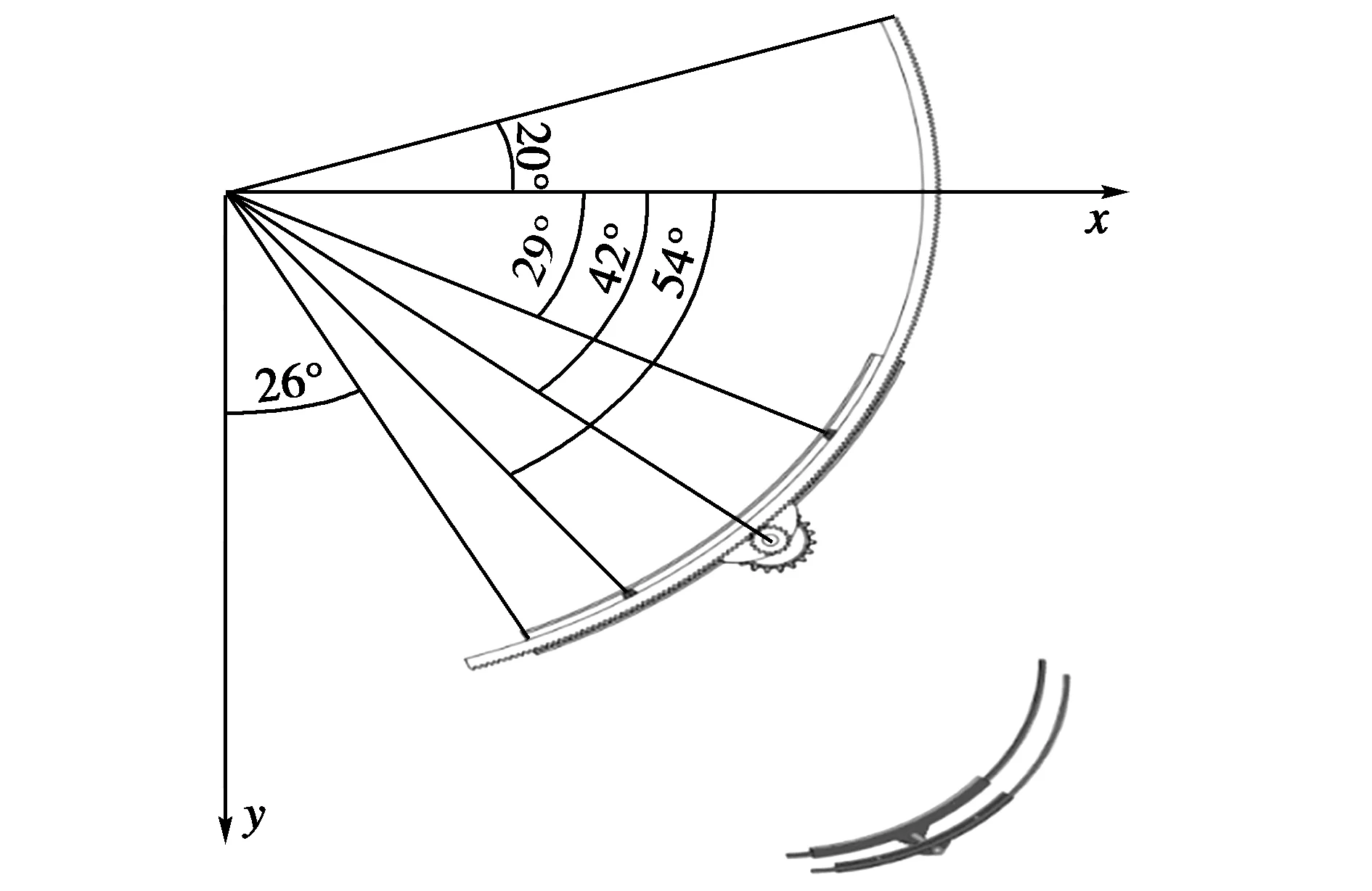
图2 初始位置状态图
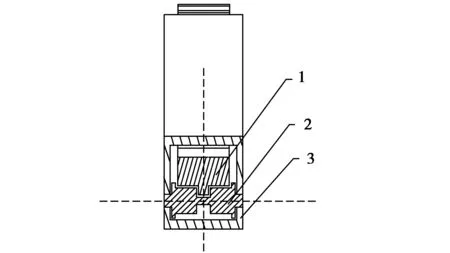
图3 限位装置截面图1.弧形导轨;2.限位轮;3.机架

图4 传动轴
2 半弧式伸缩油茶果弧形收集装置关键部件仿真
在验证半弧式伸缩结构的强度时,主要验证半弧式结构在初始状态与工作状态的强度[10]。初始状态时弧形导轨处于最上方的初始位置(如图5所示),受到三个外力与一个内力,包括两个限位轮对弧形导轨的力,齿轮给弧形导轨的力以及自身所受的重力。在工作状态下,弧形导轨位于滑轨最下方(如图6所示),受到限位轮对弧形导轨的力、齿轮对弧形导轨的力、被采集油茶果对导轨的作用力以及弧形导轨自身的重力。

图5 初始位置状态图
图6 工作位置状态图
2.1 半弧式油茶果收集装置受力分析
半弧式伸缩油茶果收集装置创新性地将半弧式结构引入到收集装置的设计中,通过齿轮与弧形齿条的组合实现半弧式齿条的伸缩。由于需要对弧形齿条进行限位,因此,弧形齿条的受力主要集中在限位轮与弧形齿条的接触位置,以及齿轮与弧形齿条的接触位置。
2.1.1 半弧式油茶果收集装置初始状态受力分析
在进行弧形齿条设计时,考虑到弧形齿条的强度以及锻造问题,因此选择铸钢并在齿面周围镀铬[11],材料密度为7 800 kg/m3,弧形导轨重量为45 kg,质心的重力为G=441 N。初始状态下,弧形导轨位于装置最上方(如图7所示),受到限位轮1对弧形导轨的力F1,齿轮机构对弧形导轨在静止状态下的合力F2,弧形齿条在几何重心的重力G。根据初始状态的受力图,考虑到实际的安装误差与稳定性[12],建立弧形导轨受力坐标系。
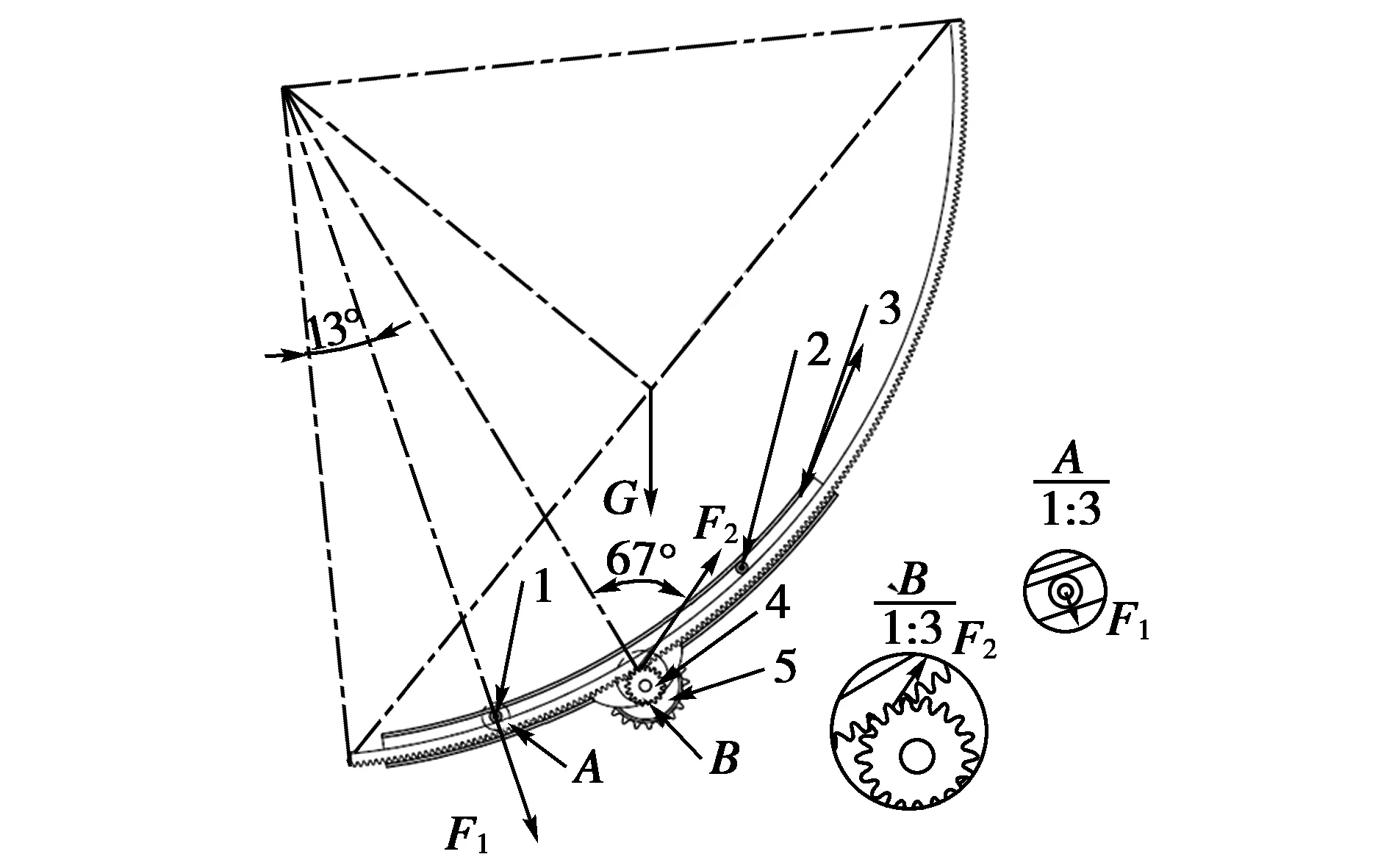
图7 静止状态下受力分析图1.限位轮1;2.限位轮2;3.机架;4.主动齿轮;5.从动链轮
限位轮1、限位轮2与齿轮4组成一组杠杆结构,在初始工作位置时,外力只受到重力G的作用,以齿轮为杠杆支撑点,限位轮2对弧形导轨没有力的作用,导轨只受到限位轮1对导轨的支持力F1以及齿轮4对弧形导轨垂直于啮合面的支持力F2。
由正余弦定理:
a2=b2+c2-2bccosA
(1)
(2)
解得,F1=320.41 N,F2=177.47 N。
2.1.2 半弧式油茶果收集装置工作状态受力分析
工作时弧形导轨沿机架伸出(如图8所示),限位轮1、限位轮2与齿轮组成一组杠杆结构,由于受到外力F1与重力G的作用,限位轮1对弧形导轨没有力的作用,弧形齿条只受到限位轮2对弧形导轨的支持力F3以及齿轮对弧形导轨的力F2。
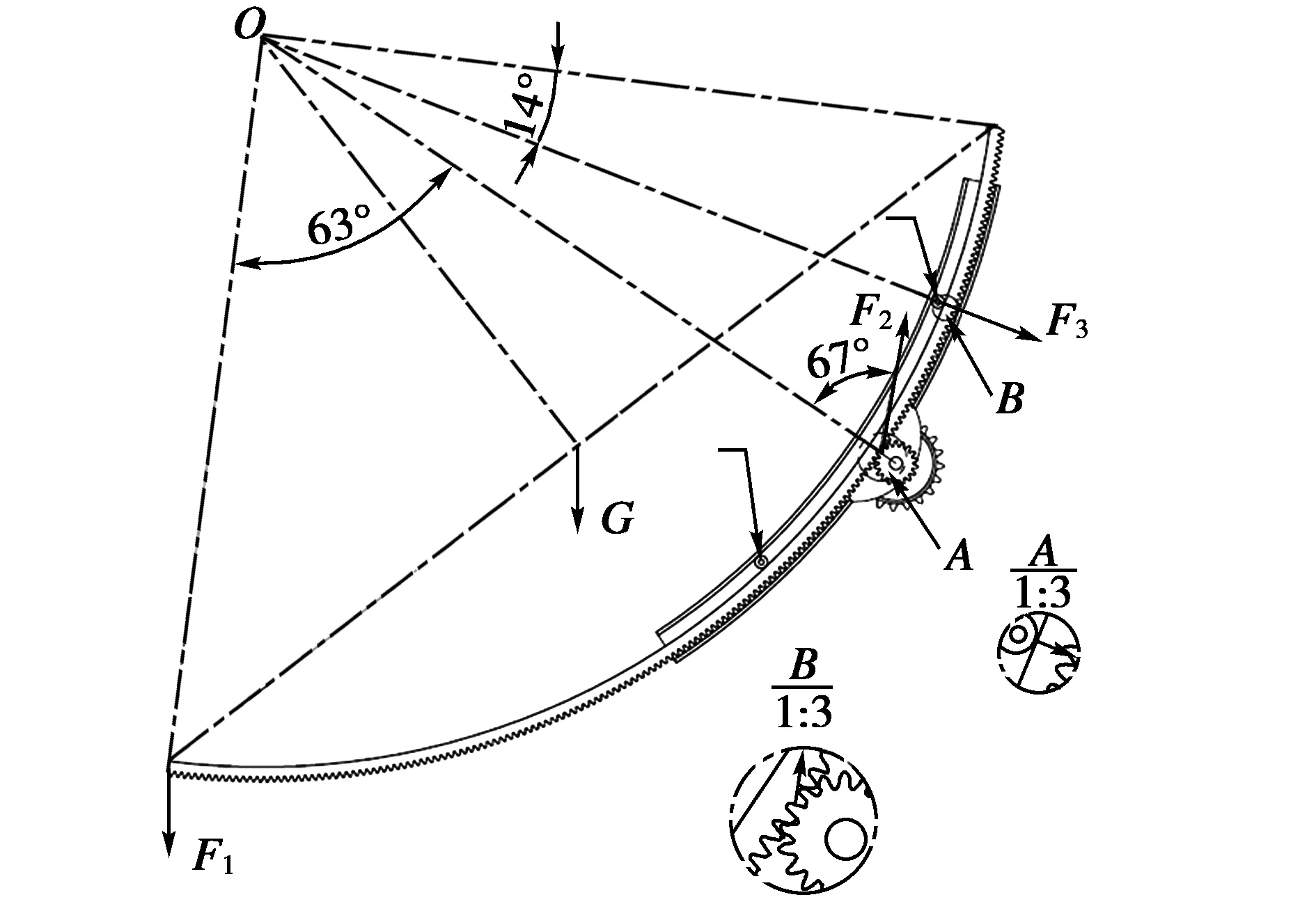
图8 伸出状态受力图1.限位轮1;2.限位轮2
选定的油茶试验田平均单树产量10 kg,F1=10 g=98 N,弧形导轨质心重量G=441 N。通过建立受力模型,其中F=G+F1=539 N,通过正余弦定理(公式(1)、(2))解得:F2=510.96 N,F3=104.43 N。
2.2 半弧形油茶果收集装置有限元分析
在对弧形导轨工作过程分析时,主要是对齿轮—弧形齿条与限位轮—弧形齿条的接触问题分析。其中齿轮齿条为面接触并伴有线接触[13],是一种非线性的接触问题,在齿轮齿条接触的过程中接触应力的变化可能会造成齿轮齿条镀铬层脱落造成表面或深层的破裂;其二是限位轮对弧形齿条的接触,接触主要为线接触。
2.2.1 半弧式油茶果收集装置初始位置有限元分析
由于Abaqus在计算非线性问题时具有良好的收敛性[14],故选择Abaqus软件对弧形伸缩油茶果收集装置进行分析,建立齿轮—齿条啮合模型与限位轮—齿条接触模型,通过建立正确的有限元模型,划分正确的网格密度,设置合理的载荷与相互作用关系,得到弧形齿条在不同载荷情况下的应力应变的变化。
(1)材料赋予 弧形导轨:密度7 800 kg/m3,杨氏模量E=210 GPa,泊松比μ=0.28。
(2)网格划分 近似全局尺寸20,网格类型C3D8R。
(3)载荷 限位轮对弧形导轨的力F1,接触类型为线接触,弧形导轨上划分dxdy的接触单元,将线接触上的集中力转换为在接触单元上的压强。齿轮对弧形导轨的力为F2,接触类型为面接触,方向始终垂直于啮合面。
(4)应力应变云图。
(5)结果分析 限位轮与弧形齿条接触位置由于受到F1的作用产生应变,应变大小为1.2×10-2mm,齿轮与齿条的接触位置受到F2的作用产生应变,应变为7.4×10-3mm。弧形齿条受力位置应变符合设计的应变变化范围,产生的应变不会影响正常工作的连续性。
2.2.2 半弧式油茶果收集装置工作位置有限元分析
弧形导轨通过铰接与收集帆布连接在一起,收集作业时油茶果的重量被集中施加在弧形导轨端部。弧形导轨一端悬空另一端被机架固定形成悬臂梁结构,在弧形导轨端部会产生较大的应变。因此在工作状态下,弧形导轨受到限位轮2的支持力F3,齿轮对弧形导轨的驱动力F2以及在端部受到的拉力F1。通过已知的外部载荷在Abaqus中建立仿真模型,网格类型为C3D8R,通过在端部加载极限载荷F1,对模型加载载荷与边界条件,经过Abaqus软件计算得到载入载荷后的应力应变图。
由应变变化图可知,在加载最大载荷的情况下弧形导轨产生的最大应变为13.14 mm,应力最大为16.19 MPa。
工作平面上弧形导轨最大应变处的变化率:
弧形导轨在工作面上应变变化率v=1.2%,在工作状态受到极限载荷的情况下,应变的变化对整体设备运行的流畅性影响符合设计要求。
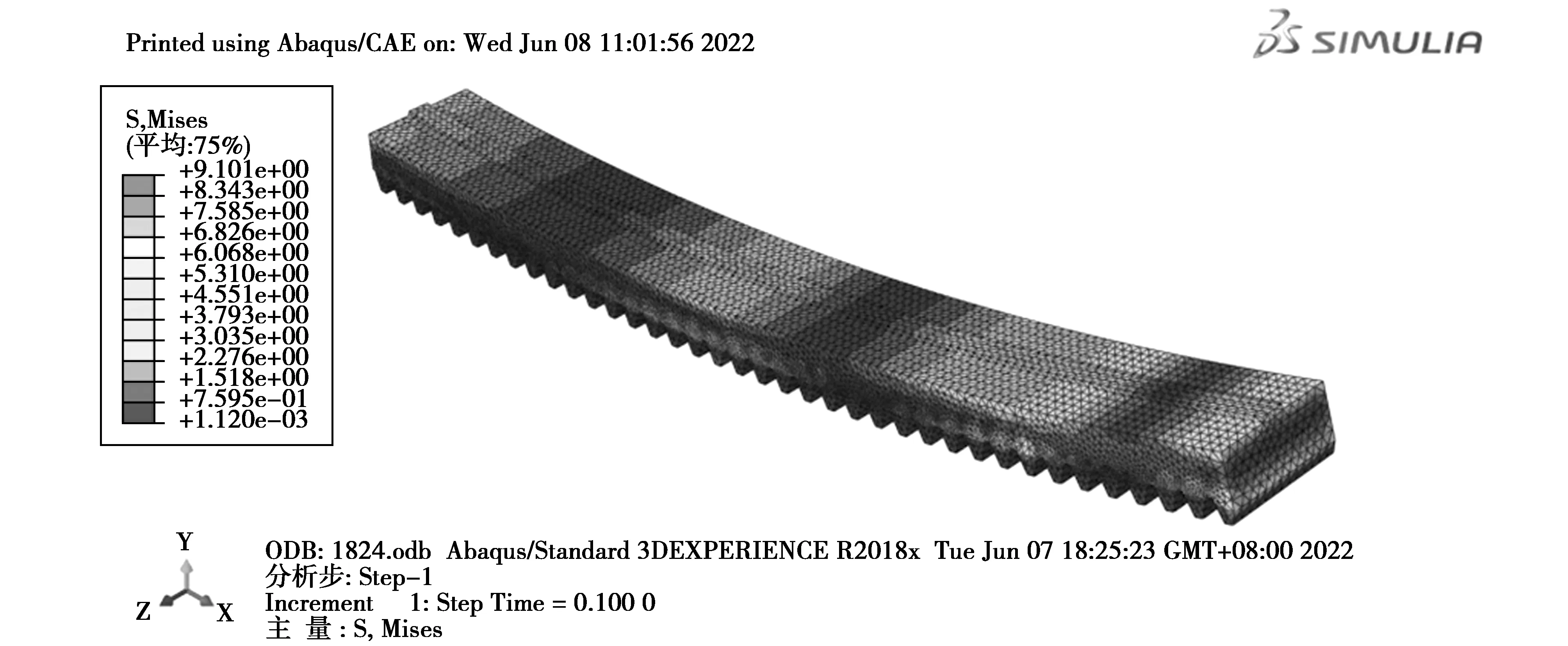
图9 弧形齿条应力图
图10 弧形齿条应变图
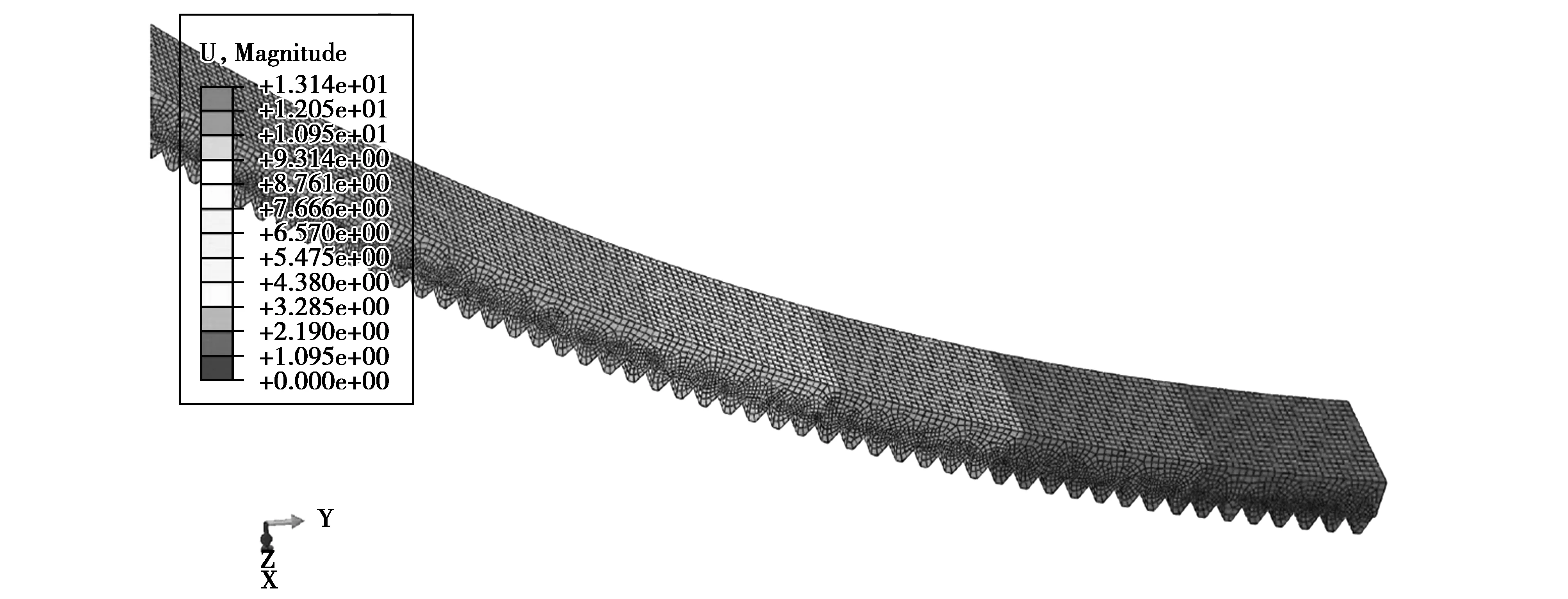
图11 弧形导轨端部应变图
图12 弧形导轨-限位轮接触位置应力图
3 结论
在进行半弧式伸缩油茶果收集装备设计时,半弧式伸缩结构作为油茶果收集装置的核心部件,其中包括限位导轮-弧形齿条结构与齿轮-弧形齿条结构两个主要结构单元。通过Abaqus软件建模得出弧形收集装置在初始时刻与工作时刻在被施加最大载荷工况下弧形齿条结构的应力应变图。本文验证了弧形伸缩油茶果收集装置的合理性,并通过建立仿真模型得到关键结构单元在施加工作载荷情况下的应力应变的变化,为半弧形伸缩油茶果收集装置的设计提供了技术支撑。
猜你喜欢
橡塑技术与装备(2023年2期)2023-02-10 02:36:20
中国特种设备安全(2022年6期)2022-09-20 02:53:48
科学大众(2021年8期)2021-07-20 07:38:52
好孩子画报(2020年10期)2020-11-02 02:52:37
哈尔滨轴承(2020年4期)2020-03-17 08:13:40
水运工程(2020年2期)2020-02-26 06:28:38
物流技术与应用(2019年6期)2019-07-16 08:14:52
猪业科学(2018年4期)2018-05-19 02:04:36
水利科技与经济(2016年7期)2016-04-25 13:03:04
重型机械(2016年1期)2016-03-01 03:42:07