林业机器人研究现状与展望
2022-09-30 02:21谭见君范润宇
林业机械与木工设备 2022年9期
谭见君, 范润宇
(湖南科技职业学院,湖南 长沙 410004)
1 林业与林业机器人
十八大以来,习近平总书记提出了以“坚持人与自然和谐共生,协同推进人民富裕、国家强盛、中国美丽”为核心内容的生态文明思想[1],而林业在生态文明建设中处于核心地位。要保护我们的绿水青山就要加强林业生态保护及修复,提高国土绿化与森林质量。
我国林业产业资源丰富,2021年森林面积覆盖率达到了23.04%,蓄积量达到了175.6亿m3[2],林业总产值超过8万亿元,并形成了三个产值超万亿元的支柱产业,分别是森林旅游、经济林和木材加工。对外贸易额达到1 600亿美元,带动了2 000多万贫困人口脱贫增收,林产品生产、贸易已位居世界第一。图1是我国2021年与2020年林木机械进出口对比[3],其中营林机械、园林机械、人造板机械和木工机械主要出口亚洲、欧洲和北美洲。
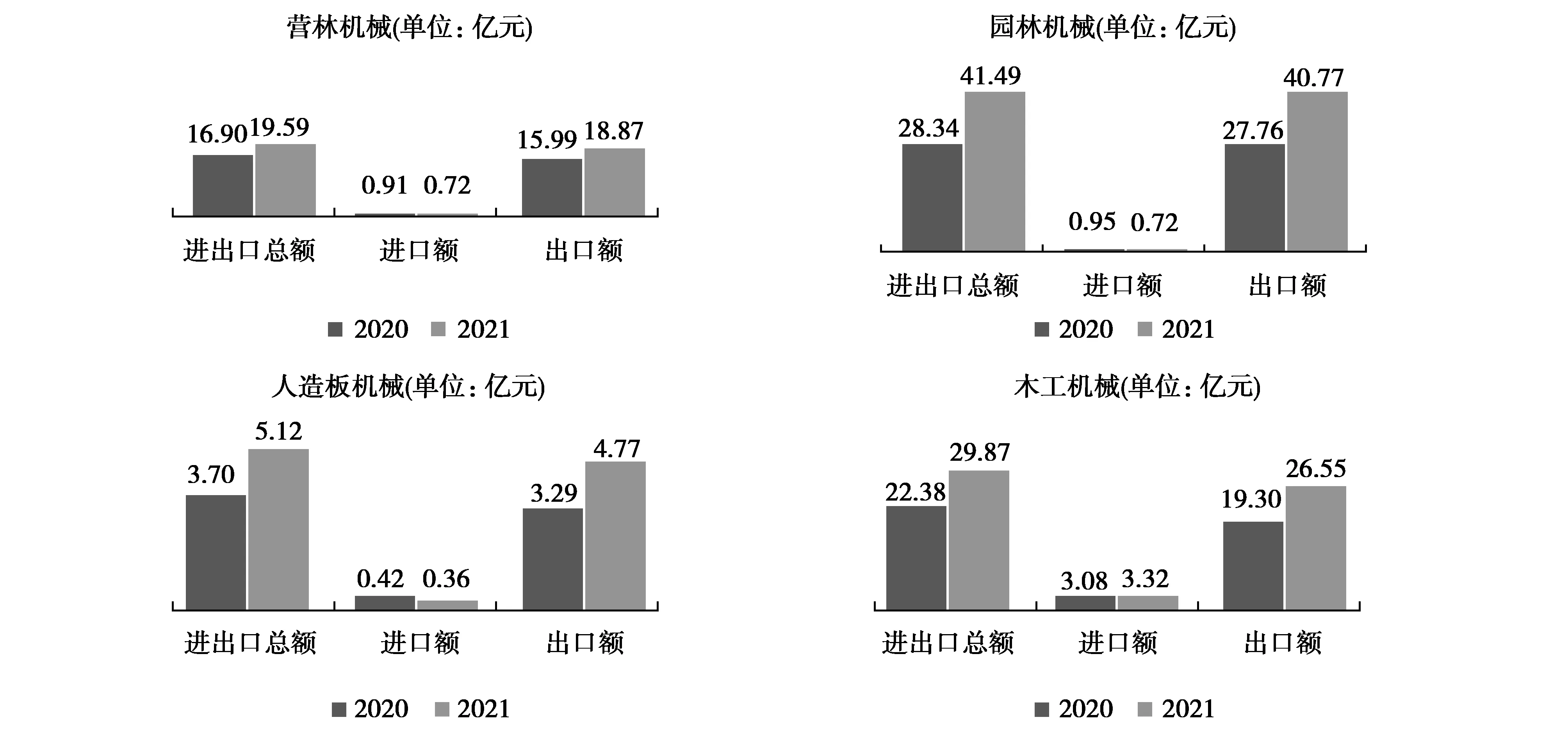
图1 我国2021年与2020年林木机械进出口对比图
随着生态文明建设的深入和技术进步,林业生产和经营方式将迎来重大变革,如劳动力减少,导致林业从业人员减少;在劳动强度、工作环境和生产安全等方面林业与其他产业均存在较大的差异,这个差异严重阻碍了产业的发展。在当前情况下,要确保林业的高速发展,提升林业装备技术就显得尤为重要。在支撑林业生态和产业体系建设两方面,林业装备均具有重要作用。林业装备不仅对我国林业的规模化经营水平具有较大的提升作用,而且能够极大地解放生产力,保障生产安全,提高生产效率,促进林业产业结构转型升级。21世纪,自动化和人工智能技术快速发展,林业装备的机器人化逐渐成为现实。林业机器人[4]是自动化或半自动化设备,是一种特种作业机器人。该机器人具有柔性、可感知外界信息、能重复编程的特点,是有机结合了电子信息、机械原理、计算机控制、人工智能等前沿学科的有机综合体,以林业为服务对象,能通过程序控制来执行林业生产和经营的各种任务。我国的林业机器人现阶段的研发集中在森林消防、林业采收、苗木嫁接、防风固沙、农药喷洒等方面,聚焦于有效解决人力资源、生产安全、生产效率等方面的问题。林业机器人已成为促进林业现代化,加快产业升级与大变革的重要驱动力。
2 林业机器人研究现状
目前林业机器人的研究已取得初步成果,根据应用场景的不同可将林业机器人分为生态林业机器人、林业产业机器人和特种林业机器人三类。
(1)生态林业机器人[5-7]:主要用于生态林业修复工作,如播种、造林、抚育、防护、采伐等工作。
(2)林业产业机器人[8-11]:主要用于大型林场的产业加工作业,如木材搬运、加工及林副产品开发等。
(3)特种林业机器人[12-15]:可满足林业工程方面特定功能需求,如林业装备制造辅助机器人、巡检机器人、野外作业机器人和攀爬机器人。
2.1 生态林业机器人研究现状
林业生态建设作为美丽中国的重要工作之一,国内一些学者已经对林业机器人展开了系列研究。徐海燕[16]等针对森林作业的应用领域,分别从培养培育和采摘运输两方面对目前应用良好的林业机器人进行了详细论述,并将林业机器人分为了嫁接机器人、采运机器人、林用清理机器人、种苗机器人、整枝机器人和消防机器人六大类,提出目前的林业机器人在多机械手协调作业、新机器人、多足移动机构和多传感器信息融合等方面研究不足,以及森林作业机器人的关键技术与发展方向在未来应集中在这些方面。
在生态林业机器人的结构与智能控制研究方面,丁云鹏[17]等以IRB140关节型机器人为研究对象,为该型机器人搭建了一个控制系统实验平台,以满足生产的实际需求为目标,设计出了能够准确、稳定的控制各关节运动,并能精准完成不同运动路径下夹取搬运任务的关节型机器人。霍凤财[18]等经过研究在2018年将移动机器人的路径分为了全局规划和局部规划两方面,分别对全局规划的快速随机搜索树算法、遗传算法和和蜂群算法三种算法进行了详细阐述,并对局部规划的模糊算法、人工势场法和A*算法三种算法做了详细说明,提出移动机器人的路径规划需要考虑当前复杂且多维的环境,进一步进行优化,可考虑混合算法。该研究结果可大幅度提升林场的苗木种植及修剪机器人的性能。
在生态林业机器人的精准识别研究方面,王成军[19]等研发了一种针对林区病虫防治应用的机器人,该机器人通过超声感应装置对树木进行检测,通过检测结果实现定向施药,精准防治病虫害的功能,该研究大幅度提高了农药的利用效率。
日本九州工业大学的Nobuo[20]研发了一种可以在广泛穿越森林的同时清除杂草的机器人系统,该机器人由“自主移动系统”和“幼苗检测系统”组成,如图2所示。该机器人系统平台为一辆全地形车辆,其中制动系统、油门和转向由电机进行控制,除草通过安装在前轮之间的多刀片机构完成。为了使机器人能够对杂草与树木进行识别,结合深度传感器数据和 CCD 相机(安装在深度传感器旁边)获取的 RGB 图像来识别外部环境,图3为CCD相机识别结果与实际地形对比。试验结果表明该机器人可以通过避开前方障碍物自主行动,并且还可以判断前方物体是否为幼苗植物或杂草,有效避开幼苗。

图2 NOBUO除草机器人样机
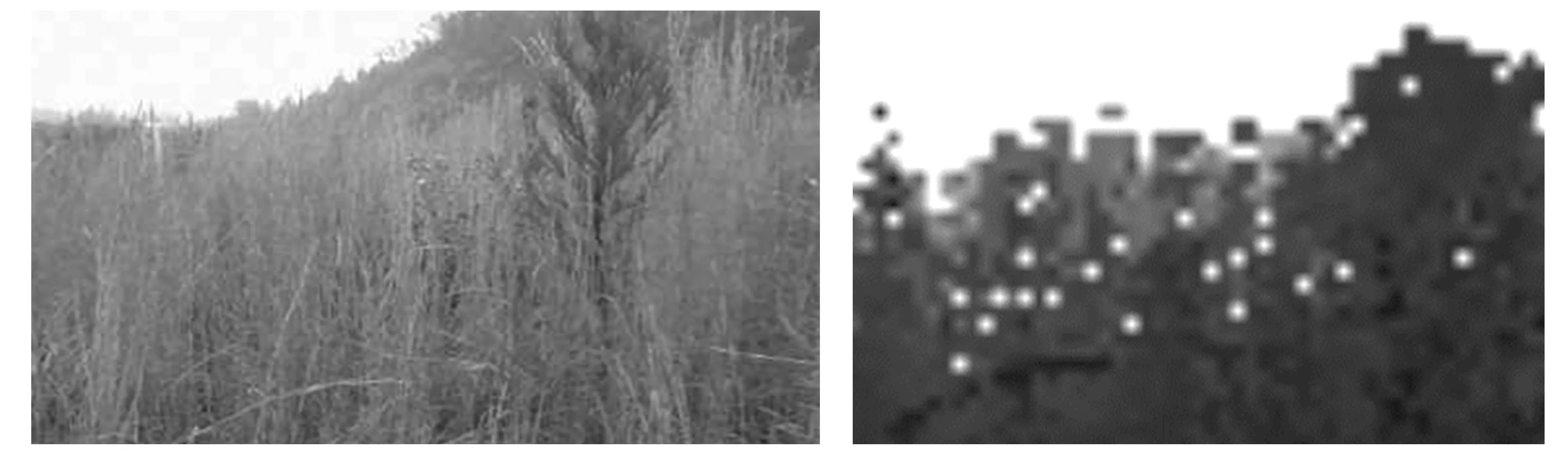
图3 除草机器人CCD识别结果
2.2 林业产业机器人研究现状
随着智能控制技术的发展,机器人在林业产业的开发上逐步得到应用推广。1996年东北林业大学研制出第一台采摘针叶树果实的采摘机器人[21],如图4所示。圆锥采摘机器人由行走机构、机械手、液压驱动系统和控制系统组成。其中6自由度机械手由转盘、立柱、下臂、上臂、采摘爪和锥壳等组成。在采摘时,机器人停驻在离树3~5 m处并挂起液压泵,将采摘爪围绕树枝闭合并向后移动,这样针叶树果实可以被顺利梳理下来。在控制系统的控制下,采摘爪向上或向下移动以瞄准另一个分支,并重复上述拾取动作。该机器人主要性能参数为:采摘高度3~14 m,最大采摘半径6.8 m,采摘爪最大采摘力2 500 N,最大爬坡坡度17°。实际测试结果表明,该采摘机器人每天可以采摘约700~1 000 kg的落叶松球果,效率是工人爬树采摘的30~35倍左右。此外,通过机器人采摘球果,母树几乎没有损坏,不影响来年球果的产量。

图4 针叶树锥采摘机器人
2002年东北林业大学研制出一款新型的树桩挖掘机器人,如图5所示。该机器人在SWDY60液压挖掘机的基础上增加视觉功能改装而成,采用全液压系统驱动,并通过计算机进行控制。圆柱形旋转切割装置取代了挖掘机的铲斗,通过两个旋转切割液压马达经齿轮机构传动,对树桩的侧根进行切割。工作过程中机械手可以选择自动或手动模式。选择手动模式时,只需操作控制手柄使机械手移动,使旋切单元垂直对准树桩。然后启动旋切液压马达,使机械臂下降旋转切割树桩。将树桩侧根全部切断后,关闭旋切液压马达,驱动四个爪夹住树桩,以便由升降机械手将其拉出。最后,启动旋转液压马达将树桩送到目的地或运输树桩的车辆,松开四个夹爪以释放树桩。该机器人的主要性能参数为:作业半径范围为4~8 m,最大爬坡坡度15°,最大铲除树桩直径550 mm,地面留洞直径仅700 mm。

图5 树桩挖掘机器人
2.3 特种林业机器人研究现状
对于特种功能需求的林业机器人研究,主要集中在运动与智能识别方面,目前大多数林业机械都使用轮式运动机构。通过主动控制,如果斜坡不太陡,机器人可以在森林地形中进行移动。为了在不平坦的地形中平稳运动,国内外学者在该领域进行了大量的研究和开发。
1995 年,Plustech Oy[22]发布了步行式森林机器人的原型,如图6所示。后来Plustech公司独立开发了步行林业机器人,如图7所示,该机器人采用一个六足液压遥控步行平台,大幅提升了运动能力。研究结果为实现林业机器人的某些特殊功能,如攀爬作业等提供了平台基础。

图6 PLUSTECH步行机器人原型
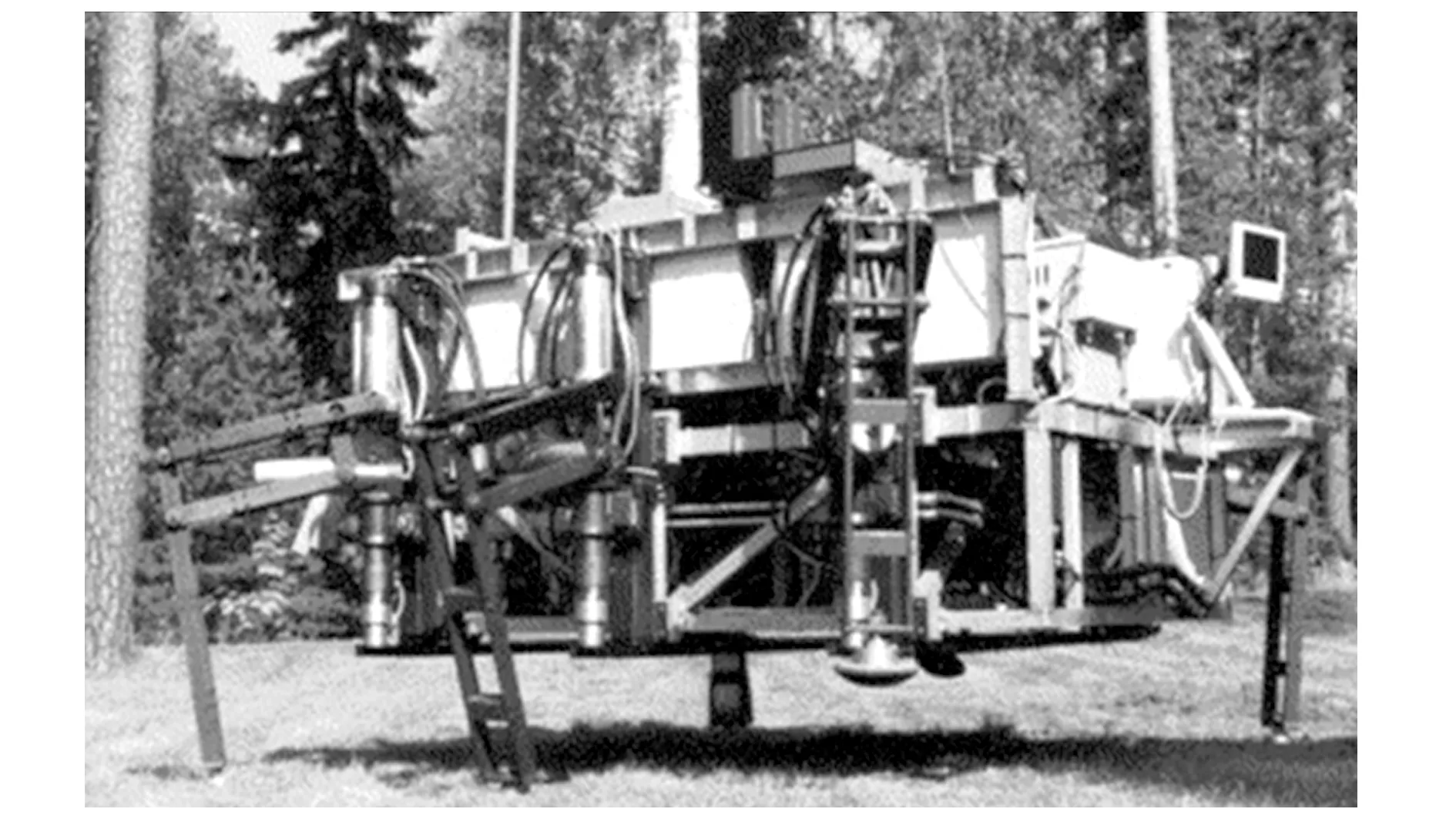
图7 六足液压遥控平台
在智能识别方面,来自瑞典于默奥大学的Simon[23]等进行了虚拟环境辅助远程操作机器人系统的人机交互研究,并在试验室进行了样机开发,构建了相关的概念场景,如图8所示。该研究结果为林业机器人的后续发展提供了广泛参考。
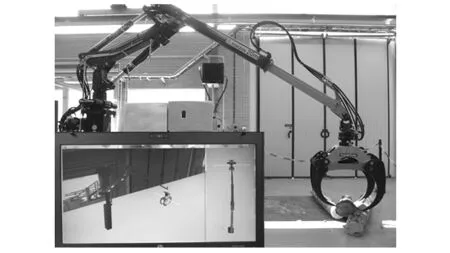
图8 林业机器人在虚拟环境中实时可视化
特种林业机器人随着探测技术的发展,可以进一步利用装配的外部传感器来感知周边环境,创建工作地图,进行路径规划,选择行进方式,依靠激光雷达、超声波雷达、红外摄像头、光学变焦摄像头,用于声音识别的常规麦克风,温湿度传感器等模块,通过采集和处理图像、声音、风向、风速、温度、湿度、颜色、气味、长度等信息,融合信息协同实现环境监测和数据采集,从而使功能不断扩展和完善。
3 林业机器人研究展望
当前林业机器人在林业产业以及生态建设方面取得了一定的进展,但相对机器人技术在工业领域的普及使用还存在一定差距,笔者认为配合天然林保护工程,振兴我国林业,保护环境,建设美丽中国,可从以下三个方面对林业机器人开展进一步研究。
3.1 轻型步行林业机器人的研究发展
由于中大型轮式林业机器人在作业过程中都不可避免地会对大型林区造成次生伤害,如工作过程中对幼苗及一些珍稀物种的碾轧。因此,开发满足特定需求的特种轻型步行式林业机器人能有效弥补当前大型轮式林业机器人的不足,这将成为林业机器人研究发展的重要领域之一。
3.2 模块化经济型林业机器人的设计发展
由于林业产业具有公益性,林业机器人的经济成本是一个不可忽略的问题。设计通用的林业机器人本体,在此基础上根据作业需要增加不同功能模块,采用1+X的林业机器人方案能有效降低成本,实现林业机器人的多功能化应用,这将成为林业机器人的应用与推广增长极。
3.3 构建远程操作的林业机器人系统
有效利用先进网络通讯技术,结合无人机、高速摄像及图像识别技术,建立“地、空一体化”的三维林区监控系统,实现对林业机器人远程精准控制。这样不仅可以提升工作效率,而且可以改善林区工作人员工作环境,避免安全事故。无人化远程作业机器人将成为林业机器人技术未来的发展方向。
猜你喜欢
林业勘查设计(2022年2期)2022-03-21
林业勘查设计(2022年2期)2022-03-21
红蜻蜓(2019年2期)2019-07-31
学生导报·东方少年(2019年13期)2019-06-19
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
恋爱婚姻家庭·养生版(2014年11期)2014-10-28
小说月刊(2012年3期)2012-05-08
新西部(2009年12期)2009-01-20