基于量子粒子群算法的火电厂热控系统自动控制研究
2022-09-29 00:56:18杨阳李滨
自动化技术与应用 2022年9期
杨阳,李滨
(广东惠州平海发电厂有限公司,广东 惠州 516363)
1 引言
工业化技术飞速发展背景下,人工智能、自动化以及数字化技术不断更新,火电厂作为重要的发电主体,越来越重视新技术使用。现阶段火电厂将经济、环保以及技术创新作为发展目标,利用更完善的系统和仪器设备,实现对电厂自身的多目标负荷优化[1]。为了降低控制成本,提高控制精度,陈勇[2]等人设计了PID 控制系统,通过构建具有平滑控制效果的方案,解决温度控制过程中数据不够精确的问题。Moleda M[3]等人利用大数据整合对火电厂系统进行自动传感控制,以优化生产过程。董胡适[4]等人将量子遗传算法与神经网络联合使用,通过提取电厂锅炉燃烧特性构建燃烧模型,利用量子遗传算法约束锅炉风门开度和燃烧器摆角,从而进一步强化热控系统的控制效果。
有关此类的控制方法很多,但存在调节时间较长的问题。本文针对该问题引入量子粒子群算法。该算法根据不同的振动信号,构建经验模态分解模型,利用模态函数描述特征向量,实现对设备运行信号的精准捕捉,为热控系统自动控制方法提出新的研究目标。
2 基于量子粒子群算法的火电厂热控系统
2.1 构建火电厂分布式热控多目标模型
火电厂热控系统管理设备数量不一,且设备类型多样、数目庞大。为了优化热控系统控制性能,构建分布式热控多目标模型[5]。预设火电厂热控安全约束条件,其中等式约束利用牛顿类潮流计算方法,计算分布式热控目标的配电潮流,该方法的约束公式为:

其中:X1、X2、X3分别表示设备的有功功率、接入电源有功功率、负荷有功功率;Y1、Y2、Y3与上述描述对象一致,但均表示无功功率;Uj表示不同方向的节点电压;θij表示相角差。利用不等式描述节点电压限制值、支路电流、有功功率限制值以及有功总量的上限。上述参数的限制条件为:


其中:f1、f2、f3表示对应参数的越限惩罚因子;α1、α2、α3表示最大极限[6]。结合目标函数的基本公式,获得分布式热控多目标模型:

其中:h表示设备运行综合情况;ω表示权重系,取值范围[0,1];Cmaxγ表示分布式设备运行状态;Rγ表示第γ条支路的电阻;ζ表示负荷功率因数;βi表示设备有功损耗;Li表示容量。通过上述模型,实现对火电厂中分布式热控目标的描述,为热控系统的实时监控,提供有效辅助工具。
2.2 量子粒子群算法分配无线电频谱
量子粒子群算法设置两用户两信道,将两个随机种群的大小设置为M,粒子维度设置为Z,可用该参数描述信道数,即Z=2,表示两信道中的功率分配情况。算法初始化处理种群规模以及粒子位置,已知发射功率固定,那么所有粒子的总维度也固定,则算法通过下列公式获得A用户的信道容量:

其中:RA表示A用户的信道容量;S11、S12、S21、S22表示不同位置的发射功率;k2表示接收机的干扰增益。根据上述结果更新用户A的个体和全局最优位置,再更新用户B的粒子位置[7]。同理计算B用户的信道容量:

其中:RB表示用户B的信道容量;k1表示发射机的干扰增益。更新用户B的个体和全局最优位置,然后再更新粒子位置。综合上述公式,计算适应度函数:

根据上述结果得到函数最优值,判断是否满足停止条件。当满足停止条件时,算法结束;当不满足条件时,则重新计算RA并更新各个步骤,直至算法结束,完成两用户两信道的无线电频谱分配。该算法剔除了交叉、更新、变异等操作,整体运算速度得到改善,有更好的寻优能力。初始化种群粒子初始位置,设置用户序号为i,此时i=1,则用户i的信道容量为:

其中:Ri表示用户的信道容量;Sij、Sbj表示用户i和随机用户b在j位置的发射功率;kbi表示随机用户的干扰增益。更新用户i的个体和全局最优位置、更新用户i的粒子位置,当i≠m时增加1,更新上述公式的计算结果;当i=m时,计算适应度函数:

算法根据不同的粒子位置,更新上述公式的计算结果,获得其中的最优值。当结果满足停止条件时,算法实现无线电频谱分配工作;当不满足条件时,则重新设置用户序号,按照上述两组公式重新运行,直至得到最优结果。通过设置两用户两信道、多用户多信道的信道容量,实现对火电厂无线电频谱的分配工作。
2.3 判定极值点同峰实现自动控制
热控系统在多目标模型和无线电频谱分配的工作支持下,搜索判定极值点同峰,实现对火电厂设备的自动控制。热控系统在量子粒子群算法的帮助下,调整数据搜索程序,按照模式搜索法搜索极值点同峰。当满足全局搜索时,展开局部搜索,根据获得的极值点重新建立数据库,保留全局极值点后重新比较当前搜索代数,当该值超过预设值时输出结果,否则进入下一循环。若不满足全局搜索要求,则重新建立全局搜索方案,直至满足目标要求后,按照满足全局搜索条件时的步骤,完成整个极值点同峰的搜索工作[8]。通过下列公式计算每一线段内存在的同峰算子:

其中:Oi与Oi+1为线段中的随机相邻两个节点。当g(i)的值存在正负变化时,说明节点之间存在峰值,两个节点为不同顶点。如果g(i)的值不存在正负变化,那么说明两个节点在同一峰值处。根据上述公式热控系统获得峰值节点,通过比较存在的极值点是否同峰,判定存在异常的设备位置,至此完成基于量子粒子群算法,优化火电厂热控系统自动控制方法。
3 测试与分析
3.1 算法测试
为了检验提出的自动控制方法,能够强化火电厂热控系统的控制效果。设计对比测试实验,比较不同算法对自动控制效果的影响程度。将基于量子粒子群算法作为实验组,将当前比较流行的,基于量子遗传算法作为对照组,通过设置不同的用户信道分配无线电频谱,比较不同算法的性能。按照量子粒子群算法内容分配无线电频谱,而量子遗传算法面对两用户两信道时,将用户编码假设为染色体,随机产生的2组染色体集合中均包含N个对象,用二进制的长度D描述染色体,例如:0010111011:0101110000为染色体编码。编码前10 个数字,代表用户i在A信道上的发射功率,剩余10 个数字代表用户i在B信道上的发射功率,分别用SiA、SiB表示。量子遗传算法初始化量子染色体,同样计算RA和RB的值,计算公式与量子遗传算法一致。然后利用用户A的染色体,执行量子全干扰交叉操作,并根据RA和RB的最优值,利用相应的染色体更新用户A的染色体,然后执行量子变异操作。重复上述操作步骤,直至更新适应度值R获得最优值。当满足停止条件时结束算法;当不满足条件时重新计算SiA和SiB,直至获得最优解。
量子粒子群算法和量子遗传算法的分配方式完全不同,分别按照各自的运行流程,分配无线电频谱。所以建立仿真测试环境,比较用户两信道条件下、多用户多信道条件下,两种算法的性能。设置种群大小为80,染色体的编码长度为20,干扰因子k=0.33、带内噪声功率q=0.0015。两种方法分别利用各自的算法分配无线电频谱,图1为不同用户和信道条件下,算法的性能测试结果。
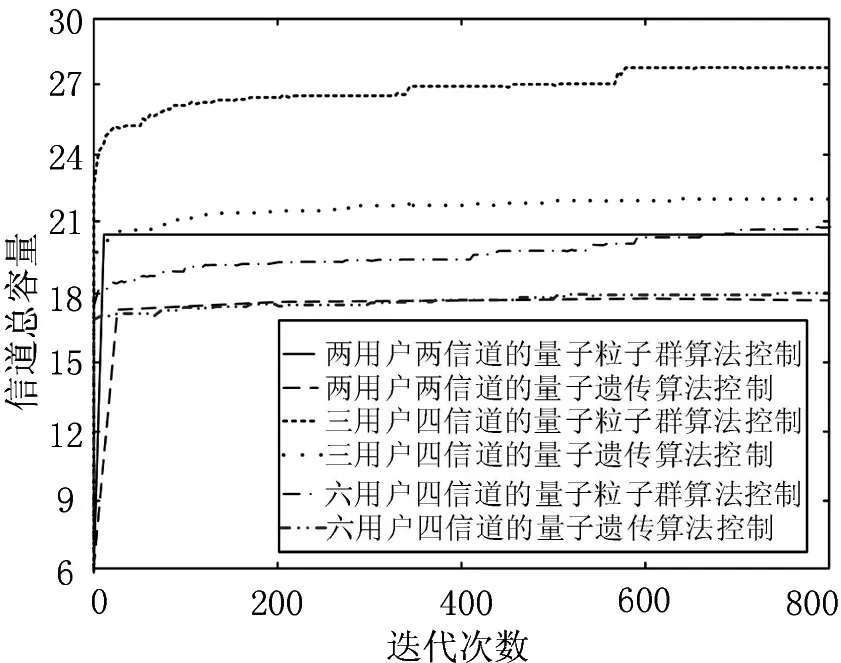
图1 不同用户和信道数量下的算法性能
根据下图显示的测试结果可知,三组测试结果中,在收敛速度上,面对两用户两信道的测试条件时,两组算法的收敛速度近似,均有较好的效果;当用户数和信道数增加时,两种算法的收敛速度随之下降,但量子粒子群算法的收敛速度高于量子遗传算法。在用户和信道搜索能力上,量子粒子群算法的搜索能力高于量子遗传算法。综合上述测试结果可知,量子粒子群算法有更好的收敛与搜索性能。
3.2 温度控制效果分析
良好的算法性能能够合理分配无线电频谱,在此基础上的火电厂热控系统,能够强化自身对设备的温度控制效果。为了验证提出的观点真实可信,利用仿真环境模拟火电厂设备运行,两种方法分别应用于同一热控系统,分别按照图2所示,连接各自应用系统的Simulink模块。
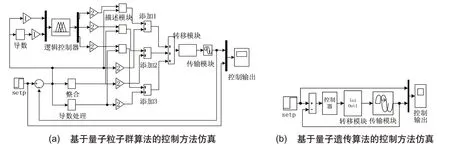
图2 热控系统Simulink模块连接示意图
结合仿真实验的特点和要求,文中方法定义设备温度为被控对象,利用下列公式等效处理该对象:

其中:Wps表示速度函数;W1、W2表示不同区域的传递函数;WH表示变送器的传递函数;WT表示调节器。利用等效处理热控系统的副回路和系统编辑器,生成输入变量和输出变量的隶属度函数值编辑界面,按照量子粒子群算法的流程,分配无线电频谱,根据输出特性曲线完成图3(a)模块连接。基于量子遗传算法的控制方法,根据热控系统的数学模型,设置W1、W2、WH以及WT的副回路调节电路,根据量子粒子群算法的无线电频谱分配结果,获得出特性曲线,完成图3(b)模块连接。两组方法应用下,热控系统在各自的自动化技术下,控制火电厂设备的温度和蒸汽设备的热量输出。为了保证测试结果具有一定说明性,仿真两种不同的测试环境,其中环境A 为理想环境,不存在扰动信号的影响;在第1300s 处添加扰动信号,构建仿真环境B。图3 为两种环境下,不同方法对热控系统自动控制功能的影响效果。

图3 温度控制效果
从上述仿真图(a)中显示可知,文中方法的控制超调量和稳态误差,分别在6.67%和2.9℃左右,且调节时间被控制在500~600s之间。而基于量子遗传算法的热控系统,控制超调量和稳态误差分别在8.3%和4.2℃左右,面对同样的测试条件时,将调节时间控制在800~900s之间。当面对图(b)的实验环境时,尽管扰动信号给自动控制带来较大困难,但文中方法最终将调节时间,还是控制在500~600s之间,而基于量子遗传算法的热控系统,在面对1300s处的干扰信号时,将控制时间扩大到1000s以上,说明面对干扰环境时,量子遗传算法的搜索效果,相对弱于量子粒子群算法。
4 结束语
此次研究结合量子遗传算法在控制方法中存在的问题,将量子粒子算法应用到自动控制方法中,通过调整电频谱的分配方式,实现在不同用户和通道中的火电厂设备温度控制。综合此次提出的方法,发现新方法的计算较为复杂,使用过程中需要注意计算误差,防止系统控制出现误差。今后可以对量子粒子群算法改进,进一步优化算法的搜索与收敛性能,提供系统搜索能力的同时,简化部分计算步骤,降低计算误差。
猜你喜欢
装备制造技术(2021年4期)2021-08-05 07:39:12
家庭影院技术(2021年3期)2021-05-21 02:15:00
铁道通信信号(2020年5期)2020-09-21 09:21:34
电子测试(2018年6期)2018-05-09 07:31:47
能源(2017年10期)2017-12-20 05:54:15
山东工业技术(2016年15期)2016-12-01 05:31:28
铁道通信信号(2016年12期)2016-06-01 12:11:58
铁道通信信号(2016年10期)2016-06-01 12:10:51
海峡科技与产业(2016年3期)2016-05-17 04:32:11
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:24