基于物流电子标签防冲突的物联网通信算法
2022-09-29 00:56:12徐友刚郭徐栋沈晓峰
自动化技术与应用 2022年9期
徐友刚,郭徐栋,沈晓峰,周 青
(国网上海市电力公司青浦供电公司,上海 201799)
1 引言
电子标签也叫数据载体、应答器或射频标签,其应用能力强弱取决于是否可继续进行无线数据信息的改写。由于时序信号的非可变性,传输数据的传递与交换关系也能得到有效保障[1-2]。随着物流信息输入量的增大,整个物联网环境中会出现明显的电子标签混乱现象,从而造成数据信息的错传与误传行为。
传统RFID型物联网通信算法借助读写器设备,分析已存储数据信息的传输目的地,再利用matlab软件,实现对物联网信道通信环境的合理维护。然而此方法并不能完全保障物联网通信环境的稳定性,易使数据信息的混乱传输情况得到凸显。
为避免上述情况的发生,提出基于物流电子标签防冲突的物联网通信算法,在振幅键控、频移键控两项系数参量的支持下,构建合理的物联网拓扑结构,再通过网络通信地址分配的方式,实现对路由传输协议的连接与应用。
2 物流电子标签防冲突技术
物流电子标签防冲突技术分析包含电子标签编码定义、振幅键控确定、频移键控确定三个处理步骤,具体研究方法如下。
2.1 电子标签编码
物流电子标签的防冲突编码以数字基带信号作为处理基础,由于此类信号很难在物联网信道中直接进行传递,若所累积的标签信息量过大,易导致物理网基带低频传输水平的下降。因此,为避免物流电子标签混乱传输行为的出现,应对所有电子标签信息进行编码处理,再以此为基础,对物联网数据通信环境进行合理维护[5]。
NRZ节点作为物流电子标签的头编码位置,由“0”、“1”两种编码形式共同组成,其中“0”代表物联网通信数据的低电平传输形式,“1”代表物联网通信数据的高电平传输形式。单极性归零节点、差分二相节点、脉冲节点同作为物流电子标签的中部编码位置。对物流电子标签进行编码处理,可在物联网环境中维持通信数据信息间的稳定传输关系,避免电子标签传输冲突。详细的物流电子标签编码原理如表1所示。

表1 物流电子标签编码原理
2.2 振幅键控
在物联网环境中,振幅键控以振幅调制的方式,对物流电子标签信息进行传输。若待调制的物流电子标签信息属于二进制信号形式,则可称为二进制型振幅键控制度,即2ASK[6]。
设r1代表物流电子标签的最小极值传输条件,rn代表物流电子标签的最大极值传输条件,n代表物联网信息在单位时间内的载波传输次数值,则通信数据的振幅键控结果表示为:

其中,a1代表第一个物流电子标签特征值,an代表第n个物流电子标签特征值,代表物流电子标签传输系数,W代表标签信息的防冲突应用指标,代表物流电子标签信息的传输系数,I代表物联网环境中的物流电子标签信息传输均值量。
以物流电子标签的传输条件为限制,通过二进制振幅键控将电子标签信息传输量控制在一定的范围内,避免超限导致电子标签传输冲突。
2.3 频移键控
在物联网环境中,频移键控可以频移调制的方式,对物流电子标签信息进行传输,也叫FSK 控制。若待调制的物流电子标签信息属于二进制信号形式,则可称为二进制型频移键控,即2FSK[7]。
假设当物流电子标签的实际存储数量达到最大数值水平后,频移键控制度的作用能力也会随之进入极值应用状态,则可设e'代表与物联网通信主机匹配的物流电子标签传输权限值,u代表标签信息的特征定义项,可将通信数据的频移键控结果表示为:上式中,y代表单位时间内的物流电子标签信息通信均值量,q代表标签信息的防冲突传输系数值,E代表特征通信条件。

随着待传输数据信息总量的增大,网络主机所负载的信息调试作用能力也会逐渐增强。利用二进制频移键控控制电子标签传输的载波频率变化,避免频率不稳导致电子标签传输冲突。
3 物联网通信算法
3.1 物联网拓扑结构
网络基站位于物联网拓扑结构的传输网络层次之中,可在物联网体系的作用下,建立上级数据服务器与下级信号解调器之间的应用连接关系,从而使网络基站中输出的物流电子标签能够快速传输至相关用户主机之中。数据交换机作为中间过渡元件,能够在记录电子用户对于物流电子标签消耗需求的同时,对数据服务器中已记录的通信数据进行打散处理,再借助中心网关,将这些信息文件反馈给下级传感设备。传感网络体系的构成相对简单,仅包含一个信号解调器、一个网桥交换机及多个下级终端传感设备,能够改变已存储物流电子标签的传输形式,从而避免数据信息冲突行为的出现。
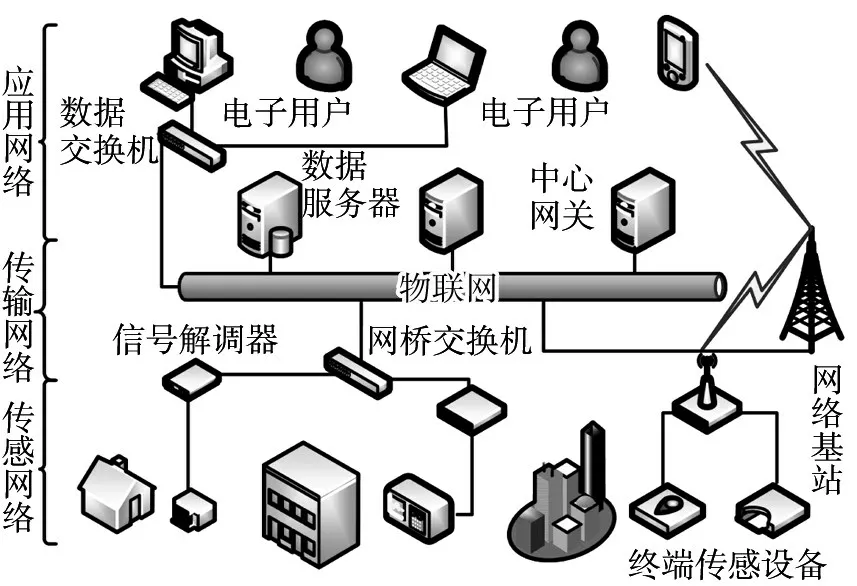
图1 物联网拓扑结构示意图
3.2 网络通信地址分配
在物联网拓扑环境中,物流电子标签通信地址分配方案的执行完全遵循分步式处理原则,即在稳定的物联网传输环境中,物流电子标签通信地址的分配享有较高的自主性等级条件,一个协调器元件可将通信地址分配的权力直接交付给下级网络路由器设备,协调器主机只能为一个路由器设备分配一个独立的地址段信息,而下级路由器则可利用该地址信息参量值为相关子设备元件继续分配地址段信息[8]。物联网通信路由器的最大连接个数及网络实际深度值都会对通信地址分配结果造成影响,且物联网的通信深度也可直接概括为数据包从一个终端设备到另一个终端设备所需经历的最小节点数量值。这些应用参数的定义必须发生在物联网组建行为之前,否则将会对物流电子标签的地址分配结果造成影响。设C1代表物流电子标签的原通信地址参量,C2代表物流电子标签的实际通信地址参量,可将网络通信地址的分配结果表示为:

其中,β代表物联网环境中的物流电子标签传输特征值,代表通信节点定义权限量代表标签节点所能承担的通信数据均值。
3.3 路由传输协议
路由传输协议是物联网环境中,负责辅助物流电子标签传输行为的应用文件,通常可在通信数据参量的支持下,建立源地址与目的地址间的传输对应关系。一个完整的路由传输协议连接项需要同时包含域名、长度(字节)等多项应用描述信息。其中,域名定义了物流电子标签在物联网环境中的实际传输能力,而长度(字节)则对物流电子标签所占传输位置进行了说明。为避免物流电子标签冲突行为的产生,在每一个通信数据帧的传输过程中,物联网主机都会根据传输参量的目的地址值来定义下一个通信行为的传输步长值,从而实现信息应用参量的多极化传输与应用。详细的路由传输协议连接原理如表2所示。

表2 路由传输协议连接原理
至此,实现各项应用关系条件的建立与应用,在确保物流电子标签不出现冲突行为的情况下,完成新型物联网通信算法的设计。
4 实用能力测试
为验证基于物流电子标签防冲突物联网通信算法的实际应用价值,设计如下对比实验。以图2所示物流货物作为实验对象,为所有货物匹配电子标签信息,使用16位随机数作为物流电子标签的识别码,使所有电子标签都具有唯一性,并将这些数据参量录入物理网主机之中,其中实验组主机搭载基于物流电子标签防冲突物联网通信算法,对照组主机搭载RFID型物联网通信算法。实验环境为:Windows 7 64位,Intel酷睿M3-7Y30,1.00GHz,内存:4GB。

图2 实验环境
STR(Self-Tuning Regutator)技术是自校正调节技术,能够对控制参数性能进行在线评估。利用此技术描述物联网主机对于物流电子标签攻击行为的抵御能力,一般情况下,STR指标数值越大,物联网主机对于物流电子标签攻击行为的抵御能力也就越强,反之则越弱。下表记录了实验组、对照组STR指标数值的具体变化情况。
分析表3 可知,随着实验时间的延长,实验组STR 指标保持先上升、再稳定、最后小幅波动的数值变化趋势,整个实验过程中的最大数值结果达到了83.19%。因未对电子标签传输的载波频率进行控制,导致稳定性较差,对照组STR指标则始终保持上升与下降交替出现的数值变化趋势,整个实验过程中的最大数值结果仅能达到52.15%,与实验组最大值相比,下降了31.04%。综上可知,应用基于物流电子标签防冲突物联网通信算法后,STR指标出现了明显增大的数值变化趋势,能够促进物联网主机对于物流电子标签攻击行为抵御能力的不断增强。

表3 STR指标数值对比表
波特率能够反应通信数据信息的传输错误率水平,一般情况下,波特率数值越大,通信数据信息的传输错误率水平也就越低,反之则越高。表4 记录了实验组、对照组波特率数值的具体变化情况。
分析表4可知,随着实验时间的延长,实验组波特率指标始终保持不断上升的数值变化趋势,整个实验过程中的最大数值结果达到了75.07B。对照组波特率指标则在一段时间的数值稳定状态后,开始呈现持续下降的数值变化趋势,整个实验过程中的最大数值结果仅能达到44.21B,与实验组最大值相比,下降了30.86B。综上可知,应用基于物流电子标签防冲突物联网通信算法后,波特率指标数值也确实出现了明显上升的变化趋势,能够较好抑制通信数据信息错误传输行为的产生。

表4 波特率指标数值对比表
5 结束语
新型物联网通信算法针对物流电子标签混乱传输的问题进,提出整改意见,在联合电子标签编码原理的同时,计算振幅键控与频移键控的实际数值结果,从而使路由传输协议得到妥善的连接与应用。在网络通信地址分配制度的作用下,STR指标、波特率指标均出现了大幅提升变化趋势,不仅使得因物流电子标签混乱而造成的数据信息错误传输问题得到有效解决,也建立了更加可靠的物联网通信环境。
猜你喜欢
环球时报(2022-04-16)2022-04-16 14:38:15
井冈教育(2020年6期)2020-12-14 03:04:32
智能制造(2020年5期)2020-07-03 06:24:00
电子测试(2018年7期)2018-05-16 06:27:18
中国交通信息化(2017年8期)2017-06-06 07:16:42
电子测试(2017年23期)2017-04-04 05:06:44
中国交通信息化(2015年11期)2015-06-06 06:51:37
中国交通信息化(2014年8期)2014-06-05 03:24:04
浙江人大(2014年6期)2014-03-20 16:20:40
中国火炬(2012年3期)2012-07-25 10:34:06