基于Sentinel-2时序影像的水稻种植信息提取
2022-09-29 08:11汪荃陈军军
湖北农业科学 2022年16期
汪荃,陈军军
(1.中南勘察基础工程有限公司,武汉 430081;2.湖北正纽地理信息有限公司,湖北 黄石 435006)
近年来,中国水稻种植面积逐年减少,因此需要利用遥感技术实时精确获取水稻空间分布及种植面积信息为各级政府指导水稻生产、平衡区域供需提供参考。目前,多数遥感传感器具有高光谱、高分辨率、长时间观测等特点,能够在遥感监测农作物生长信息方面发挥很大的作用,从而大大提升农业生产效率[1-5]。农作物生长信息大多均由中分辨率遥感卫星SPOT、Landsat等遥感监测,苗翠翠等[6]利用MODIS遥感影像对江苏省水稻种植面积进行监测分析,Chen等[7]利用MODIS时间序列影像对湄公河三角洲上游的水稻种植强度进行监测。而Sentinel-2卫星影像数据虽然较少使用在农作物遥感监测上,但是其分辨率高、覆盖范围广,适用于对农作物进行监测。
因此,本研究采用Sentinel-2卫星影像数据作为数据源,采用基于像素分类的最大似然法、支持向量机法对研究区水稻信息进行提取,3种植被指数NDVI、NDGI、RVI及其组合并结合多时间序列影像数据提取研究区水稻种植信息,并采用混淆矩阵对分类结果进行精度评价和结果分析,旨在得到适合于此研究区的最优提取方案。
1 研究区及遥感数据
1.1 研究区概况
研究区域为芜湖市芜湖县南部面积为118.8 km2的水稻种植区,其位于长江下游,东经117°40′—118°44′、北纬30°19′—31°34′,属亚热带湿润季风气候,雨量充沛,光照充足。年平均气温在15~16℃,年均日照时长约2 000 h,年降雨量约为1 200 mm,该区域主要种植水稻、玉米、高粱、小麦、豆类等粮食作物[8]。
1.2 Sentinel-2遥感数据
欧州航天局发射的Sentinel-2卫星,是一枚具有多光谱成像仪的遥感卫星。Sentinel-2卫星在光学数据方面的性能十分优异,Sentinel-2遥感数据在红边范围拥有3个波段和10、20、60 m 3种分辨率。研究表明,Sentinel-2卫星遥感数据可以在农作物信息提取和农作物分类研究等方面发挥较大的作用,而在农作物产量监测中,其经济实用性和性能优异性会有更优的体现[9-13]。
本研究按芜湖县水稻种植收获周期的时间序列(表1)(早稻一般3月上中旬播种,7月下旬收获;晚稻6月上中旬播种,10月下旬收获)[14]获取3月至10月共8个月的覆盖芜湖县地区的16景坐标系统为WGS84,投影方式为UTM的Sentinel-2 Level-1C产品图像。对获取的研究区影像进行目视解译,将目视解译的结果中3/4作为解译标志,1/4用作精度验证,在目视解译结果中,按照样本在研究区域均匀分布的原则选取20个样方,并用转换分离度与Jeffries-Matusita距离对样方进行可分离性判断,当结果处于0到2之间时,值越大代表可分离性越好。如表2所示,两种指数的检验结果均大于1.85,选取样本可分离性很好,可用于水稻分离提取研究。

表1 芜湖县水稻物候期
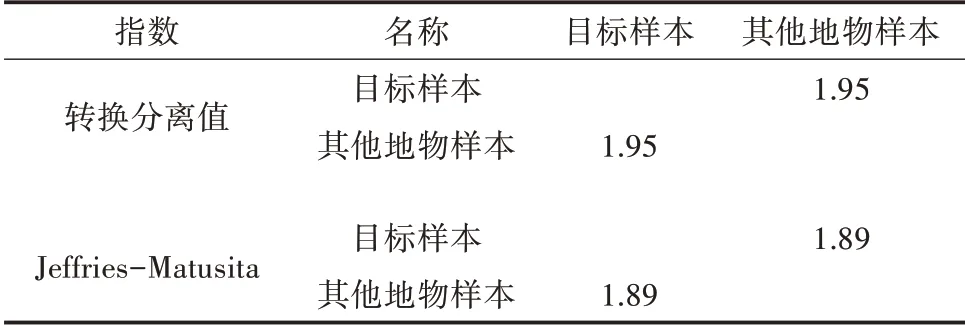
表2 训练样本的可分离性检验结果
2 研究方法
2.1 基于像素方法的水稻信息提取方法
采用最大似然法和支持向量机法分别对2019年单一时相研究区Sentinel-2遥感图像进行水稻分布信息提取。在分类完成后用聚类方法对2种分类方法所得到的结果进行处理,以提高分类精度。最后对分类结果的Kappa系数、总体度等分类结果进行比较,得出较适合于水稻信息提取的监督分类方法。
支持向量机分类法作为一种基于像素的分类方法,其理论基础是统计学。使用非线性函数将输入的空间特征数据由低维变换至高维,然后在高维的特征空间上再次利用数学统计方法得到数据的最佳线性分类面,从而实现分类结果的精度最大化,解决了低维空间数据不易被分类的难点。该分类方法是以一定数量的样本作为依据建立模型,使建立的模型既有很高的分类精度又有可以识别的样本类别广度,以获得最佳的分类效果。如图2所示,分类超平面wTx+b=0不仅可以把所有样本分开,而且还和最近的样本点(支持向量)保持一定的函数距离,该分类超平面比感知机的分类超平面表现更优,该超平面只有1个[15]。采用支持向量机法结合单时相影像对样方进行水稻信息提取,结果见图3。

图2 支持向量机模型
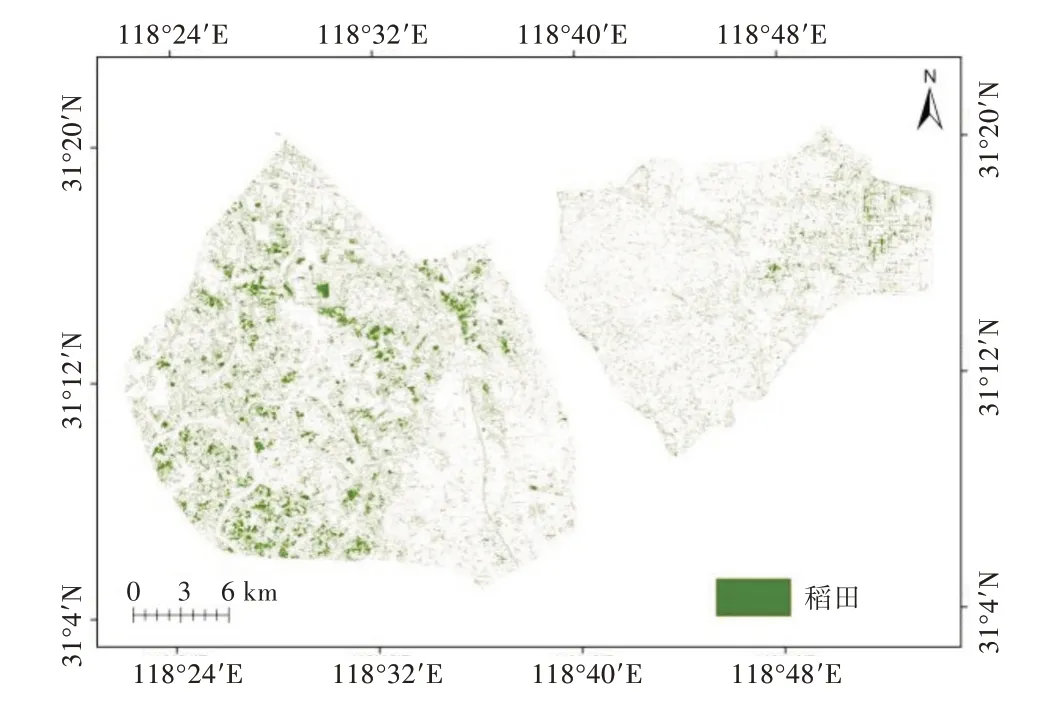
图3 基于单时相的支持向量机法水稻信息提取
最大似然分类法是一种基于像素的分类方法。它的分类器是一种鲁棒性、稳定性表现突出的分类器。如图4所示,它是使遥感影像各个波段数据形成正态分布从而来构造出判别分类函数,其基本思想是根据所选取的训练样本将样本中的所有像元以点集的方式在二维或者三维空间中表现出来,然后再将点集当中的所有像元数据在每个维度空间上以数轴正态分布的形式进行表达,最终每一个点集上的每一个维度的像元数据都以为正态分布的形式存在;但是每个以多维正态分布形式存在的点集都存在各种差异,例如空间大小、空间位置、集约程度等。而最大似然法根据这种差异通过贝叶斯公式计算得出每一个像元数据归依到各个类别中的概率大小,构造一个概率分布模型,再将像元数据分类到概率最大的类别中,以此完成分类[16]。采用最大似然法结合单时相影像对样方进行水稻信息提取,结果见图5。
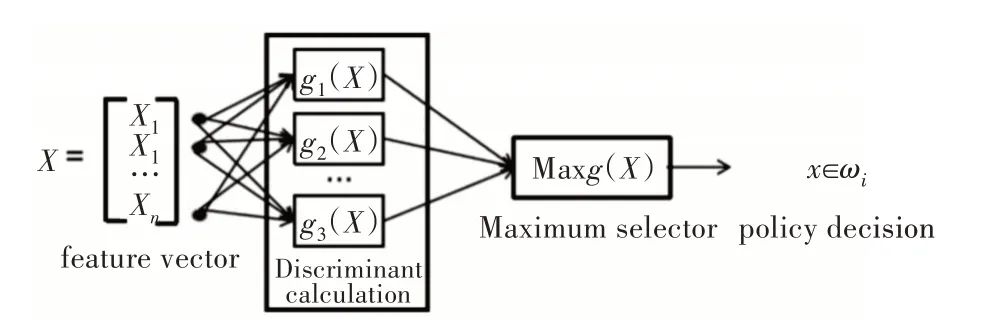
图4 最大似然法模型

图5 基于单时相的最大似然法水稻信息提取
2.2 基于多时相影像的分类方法
采用最大似然法结合目视解译并利用多时相影像(6月11日和9月9日的Sentine-2遥感影像)将训练样本分为水域、绿地、耕地及建筑用地,如图6所示,再根据相关农作知识提取研究区水稻面积。由于6月11日时晚稻还未插秧,部分水稻用地在遥感图像上显示为水域,结合6月11日和9月19日时序影像分析,6月11日遥感影像分类为水域,同时9月19日分类为绿地的样本最终分类为水稻用地;6月11日遥感影像分类为水域,同时9月19日分类为水域的样本最终分类为非水稻用地(鱼塘、水渠等);6月11日遥感影像分类为绿地,同时9月19日分类为水域的样本最终分类为水稻用地。为增加非水稻用地水域与水稻用地水域的对比效果,特选取研究区2的水域(经实地观察多为鱼塘)与研究区1的水域(多为水稻用地)作对比分类试验。
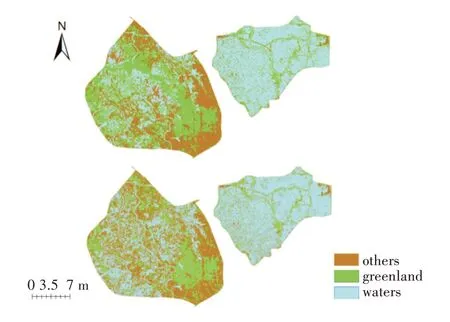
图6 2019年6月11日(上)至9月19日(下)研究区土地类型变化
2.3 基于植被指数的水稻信息提取
NDVI值又称归一化植被指数,该植被指数的特征是具有周期变化性,本研究选取研究区的归一化植被指数变化序列,利用该研究区的多时相遥感影像数据处理,然后利用水稻的周期演变同其他作物的周期演变之间差异作为区分指标将水稻信息进行提取,公式如下所示:

式中,IR是红外波段像素值,R是红光波段像素值。
利用NDVI对选取好的样方进行提取处理,提取出水稻、玉米、小麦在其发育过程中NDVI值,然后绘制3种农作物的月平均值随月份变化而变化的折线图。如图7所示,3月至6月小麦的NDVI值递增曲线斜率最大,而水稻次之,玉米的斜率最小;同时小麦的斜率转折点出现在6月,水稻的斜率转折点出现在7月,玉米的斜率转折点出现在8月,通过转折点出现的时间将3者区分。
NDVI对于照明与观测非常敏感,在水稻生长过程的前期,会过高估算水稻所占百分比;在水稻生长过程的后期,会过低估算水稻所占百分比。
为了提高提取水稻分布信息的精度,本研究使用RVI和NDGI辅助NDVI进行组合对水稻分布信息进行提取。
RVI又称比值植被指数,对于含叶绿素较多的农作物的变化十分灵敏,可用作绿色植被提取分类的参考指数,其公式如下所示:

式中,R是红色带反射率数据,NIR是近红外带反射率数据。
NDGI又称归一化差异绿度指数,可以用于检验各种农作物的不同时期的生长状态,其公式如下所示:

式中,G是绿色带反射率数据。
通过对选取好的样方遥感数据进行处理,得到在水稻的随时间序列变化过程中RVI与NDVI3月到10月的每半个月份的平均值,将该值用来代表水稻在各个月份的植被指数值,获得植被指数在3月到10月间变化指数大小。该指数变化折线图如图8所示。
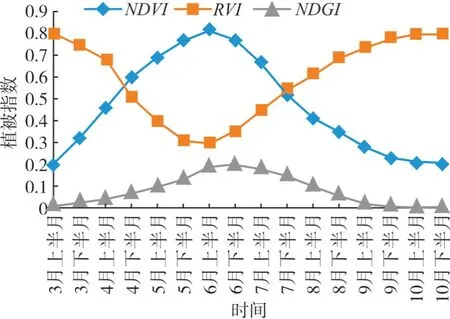
图8 水稻的3种植被指数时序变化
由图8可以看出,在3月到10月水稻生长周期内,6月时水稻NDVI和NDGI的斜率转折点都由正转负,数值变化特征结合决策树分类可以提升水稻的分布信息提取精度。水稻RVI值的曲线斜率出现在6月,6月之前为负,之后为正。如果NDVI和NDGI曲线斜率转折点出现在6月,6月之前曲线斜率为正,6月之后曲线斜率为负,且NDVI的曲线斜率绝对值大于NDGI的曲线斜率;并且RVI的曲线斜率转折点也出现在6月,且6月之前为负,之后为正。将3种指数特征的作物作为水稻进行提取,具体分类流程如图9所示。通过对水稻的植被指数曲线斜率变化分析,得出符合要求的作物大多分布在研究区的西部,符合实地调研结果。

图9 基于3种植被指数时序影像的分类流程
2.4 精度评价指标的建立
在运用不同的分类方法进行分类后,需要对基于分类方法建立分类模型的分类结果进行比较,评价出分类结果较好的方法,从而研究出高精度提取水稻种植信息的分类模型。本研究采用基于像素的混淆矩阵进行分类精度评价,该方法是目前普遍使用的分类精度检验方法。混淆矩阵在图像精度评价中,主要用于对分类结果和实际值进行比较分析,在一个混淆矩阵里面把分类结果的精度显示出来[17,18]。在混淆矩阵中,Kappa系数与总体分类精度可以对分类结果的整体分类效果进行评价,而生产者精度与用户精度可以对单个类别的分类结果进行评价。总体分类精度表示的是在所选的所有样本最终分类结果中分类无误的类别总数与所选的全部样点总数的比值,反映最终分类结果的总体精确度。Kappa系数表示的是最终提取地物的类别与实际类别的相互匹配准确度,最后结果值在0到1之间,当最终数值大于0.8时表明结果与实际一致性较高[19]。
3 结果与分析
3.1 基于像素的分类方法的结果
基于单时相遥感影像的情况下支持向量机法和最大似然法对水稻种植区域提取的精度如表3所示。由表3可知,最大似然法分类结果的总体分类精度达到89.73%,其Kappa系数达到0.797。分类总精度比支持向量机法的分类总精度83.67%,增加6.06个百分点,Kappa系数比支持向量机法的Kappa系数0.640增加0.157,采用最大似然法提取水稻精度更高。

表3 基于像素方法的水稻面积提取精度
对研究区进行基于像素的2种不同分类方法的水稻面积提取,得出以下结论:①最大似然法和支持向量机法结合单时相影像提取水稻的结果总体精度都低于90.00%,其主要原因是芜湖市属亚热带湿润季风气候,7—9月研究区降雨量较大,影响遥感影像质量进而影响了提取精度;②通过实地考察得知,6月上旬和9月上旬,研究区域早稻和晚稻都分布陆续开始被收割,研究区南部的水稻种植区域中有大面积的旱地掺杂其中,所以导致最终的分类提取结果多为分离度较高的水稻种植地块,使得水稻提取的精度有所降低;③对中低纬度双季稻地区进行水稻面积提取时,由于该研究区域旱地与水稻交错在一起,水稻种植区域分散度较高[20]。而最大似然法比起支持向量机法可以识别单独像元,更适合提取破碎地块信息[21],在该研究区,最大似然法分类效果优于支持向量机法。
3.2 基于分析多时相影像数据的分类方法的结果
利用最大似然法分别结合单时相影像数据和多时相影像数据对研究区的水稻面积信息进行提取,2种分类方法下各自分类的相关精度如表4所示。由表4可知,多时相分类结果的总体分类精度达到91.23%,Kappa系数达到0.817。分类总精度比单时相分类的总体分类精度89.73%,增加1.50个百分点,Kappa系数比单时相分类的Kappa系数0.796,增加0.021,基于多时相影像的分类方法提取水稻精度更佳。

表4 基于多时相影像的水稻面积提取精度
基于多时相影像数据的分类提取方法总体分类精度为91.23%,Kappa系数为0.817,均高于基于单时相影像数据的分类提取方法,是因为基于多时相影像数据的分类方法所处理的影像数量更多且具有时间序列特性、地物情况具有复杂性(变化和未变化的地物相互混杂)、数据异质性更强(成像条件不同所带来的数据差异)。对地物和相关现象进行长期跟踪观测从而更加精确地识别研究区土地利用类型的状态变化,进而降低单一时相影像数据导致分类提取时的错分误差和漏分误差,提高分类提取水稻的精度。
3.3 基于植被指数的分类方法的结果
将根据影像计算出6类植被指数及其组合作为分类指标,结合多时相影像分别采用2类分类方法对研究区水稻信息进行提取,得出每种植被指数在2类分类方法下各自的分类精度,如图10、图11所示。

图1 研究区区位

图10 6种植被指数及其组合在2种分类方法下的总精度

图11 6种植被指数及其组合在2种分类方法下的Kappa系数
NDVI、RVI2个植被指数在2个分类方法中总精度和Kappa系数最高的都是采用最大似然法,分类的总体精度都超过90.0%,其中分类精度最高的为NDVI,分类总精度达到94.0%,Kappa系数为0.870。NDGI分类的总精度和Kappa系数在采用支持向量机分类方法时最高,分类的总精度为91.9%,Kappa系数是0.852。在采用单一植被指数作为分类特征时,最大似然法在以NDVI、RVI2个植被指数为分类指标时比使用支持向量机法有较好的分类效果,而支持向量机法在以NDGI为分类指标时比使用最大似然法的分类精度更高。NDVI分类的总精度为最高,分类效果较好的是采用RVI进行分类。而NDGI整体分类精度较差,无法较有效地分类出水稻。
另外对NDVI、RVI、NDGI3种植被指数的不同组合形式进行精度评价得到以下结果:3种植被指数组合都是采用最大似然法时总体分类精度和Kappa系数更高;当NDVI和RVI或NDGI任意一种植被指数进行组合时,总体分类精度都会随之提升,其中NDVI和RVI的组合要优于NDVI和NDGI的组合;当3种植被指数组合使用时,总体分类精度和Kappa系数都达到最高。
该组合方式结合NDVI明显的时间规律性,RVI对绿色植被的敏感度和NDGI对不同植被活力的检验等植被指数特性,利用植被指数值随时间变化的曲线斜率和值域提高水稻信息提取的精度[22,23]。如图12所示为利用NDVI、RVI、NDGI并结合最大似然法对水稻进行提取的结果。芜湖县农作物种植区的水稻分布分散度较高,在农作物种植区的西部有大量水稻种植,而种植区东北部主要为鱼塘,南部为旱田,为芜湖县谷业和渔业分布区。
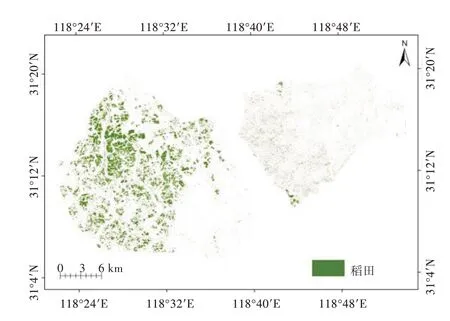
图12 研究区水稻种植区域分布
4 结论
本研究对芜湖市芜湖县南部面积约为118.8 km2的水稻种植区水稻信息进行提取。使用Sentinel-2卫星为数据源,利用基于像素分类的最大似然法、支持向量机法和3种植被指数NDVI、NDGI、RVI及其组合并结合多时间序列影像数据提取研究区水稻种植信息,然后采用混淆矩阵对分类结果进行精度评价,得到适合于此研究区的最优提取方案。①在对中低纬度双季稻地区进行水稻面积提取时,基于像素的分类方法当中,最大似然法优于支持向量机法。②在对水稻信息进行提取时,利用多时相影像数据通过对地物和相关现象进行长期跟踪观测从而更加精确识别研究区土地利用类型的状态变化,进而降低单一时相影像数据导致的分类提取时的错分误差和漏分误差,提高分类提取水稻的精度。③在相同情况下,NDVI较RVI,DGI更适合于进行水稻信息提取。同时,不同植被指数相结合使用时,精度更优。
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
农业机械学报(2019年6期)2019-06-27
水土保持研究(2018年5期)2018-10-12
电子制作(2018年11期)2018-08-04
中国农业信息(2018年2期)2018-07-28
高中生学习·高三版(2016年9期)2016-05-14
测绘科学与工程(2016年5期)2016-04-17
新高考·高二数学(2015年11期)2015-12-23
西藏科技(2015年1期)2015-09-26