
基于3D SLAM 算法的输电线路激光雷达移动测量系统设计
2022-09-28 14:50欧发斌张国永朱开放
电子设计工程 2022年18期
欧发斌,韦 涛,杨 钦,张国永,朱开放
(1.广西电网有限责任公司,广西南宁 530000;2.广西电网有限责任公司崇左供电局,广西崇左 532200)
为保证输电线路的稳定运行,需要对工程质量进行有效的监督和验收[1]。以往的输电线路测量普遍采用人工测量方法,工作量大、检测工序繁琐,且耗时长,经济成本较高,无法满足当今大规模智能化电网建设发展的需求[2]。基于此,文献[3]依据潮流计算原理测量输电线路零序阻抗参数,对所有存在互感耦合的输电线路进行测量。然而,如果受到外界因素干扰,将会影响测量结果。文献[4]采用微分环非接触式测量方法,通过传感器的自积分能够准确反映被测电流波形,然而外界电流干扰会造成测量结果不精准。
针对上述问题,提出了基于3D SLAM 算法的输电线路激光雷达移动测量系统。该系统通过对输电线路的探测和定位,结合3D SLAM 算法获得点云数据,并以此作为系统测量的标准。该系统可以自动测量地面目标至线路的距离,快速发现隐患,实现对线路的智能化管理。
1 系统硬件结构设计
基于3D SLAM 算法的输电线路激光雷达移动测量系统硬件结构如图1 所示。
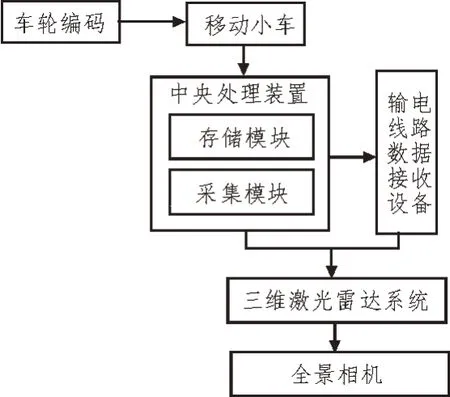
图1 硬件结构示意图
由图1 可知,该系统采用便携式结构移动小车测量故障点的方式,设置了中央处理装置的采集模块和存储模块,分别负责输电线路数据的采集和存储。数字化接收设备接收检测结果,并结合全景相机,将接收到的输电线路数据输入三维激光雷达系统进行数据分析,依次降低各设备的安装位置,确保各设备之间的工作互不干扰[5-7]。
1.1 中央处理装置
1.1.1 数据采集模块
整个系统以AD7502 芯片为核心,以DSP 为输电线路数据采集模块[8-9],该DSP 数据采集模块可以将数据总线与地址总线并行,提高数据吞吐率,满足实时性要求[10-11]。
1.1.2 数据存储模块
数据存储模块会通过主机扫描检测器采集数据,通过主机实现数据的存储[12]。数据存储模块如图2 所示。
[48] Sean P. Henseler, “Why We Need South China Sea Freedom of Navigation Patrols”, The Diplomat, October 6, 2015, https://thediplomat.com/2015/10/why-we-need-south-china-sea-freedom-of-navigation-patrols/.
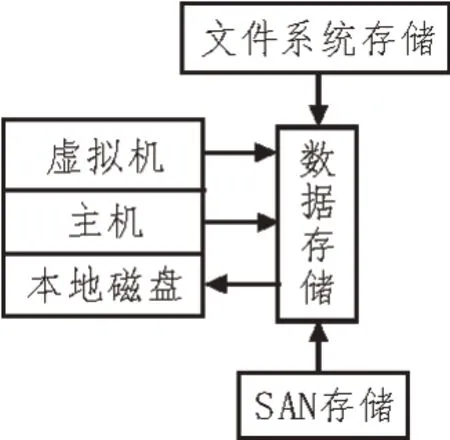
图2 数据存储模块
以统一的方式封装存储器资源,数据存储后可与主机相关联,从而为虚拟机创建多个虚拟磁盘[13]。
1.2 测量装置安装
采集小车的安装支架上设有固定装置,包括上下平面结构和设置在上下平面结构之间的斜面结构[14]。单机采用斜面式,多机采用低面式,处理单元与单机雷达多线式相连接。平板及支架与采集车尾部平面倾斜度为45°,其夹角为扫描角,安装方便。坡道结构还配有惯性测量装置(IMU),用来连接处理器 模块与CPU 电 气[15]。
1.3 全景相机
基于3D SLAM 算法的输电线路激光雷达移动测量系统还包括支撑全景相机的竖杆和支撑摄像机的竖杆,竖杆一端连接支架固定,另一端电源连接全景相机中央处理器的处理模块,竖杆高度大于安装座高度,以保证拍摄到输电线路全貌。
1.4 三维激光雷达系统
三维激光雷达系统由航天器、GPS、激光扫描仪等组成,其结构如图3 所示。
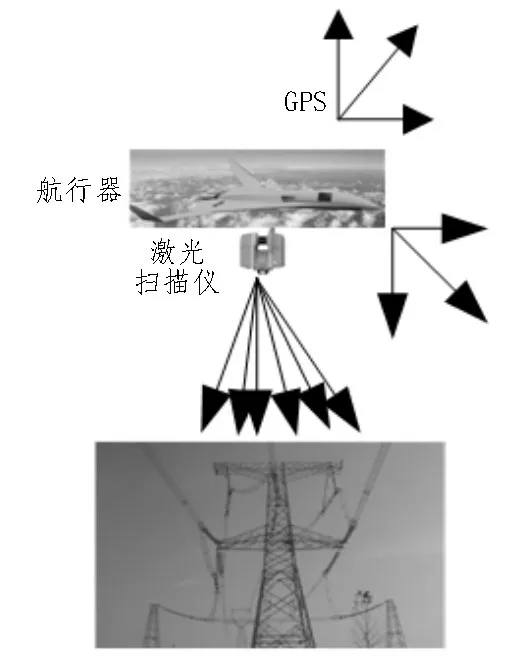
图3 三维激光雷达系统结构示意图
由图3 可知,航行器的固定机翼与直升机构成一个飞行平台,惯导系统通过动态差分全球定位系统接收机提供飞行器的瞬时三维坐标,并能够对飞行器的瞬时姿态参数进行测量,形成系统的定位和惯导测量系统。用激光扫描仪测得测量中心到地面采样点的距离,该系统分为三个主要部分:控制、记录和同步[16]。采用激光回波点的三维坐标,可建立高精度的模拟数字高程模型,实现地物地形的测量。
利用激光扫描仪从不同角度向输电线路发射多线激光雷达光束,与扫描面形成倾斜的斜面。若激光扫描仪发射的多线激光雷达光束越多,则扫描平面上的倾角将在不同的光束方向上产生一定的倾斜,此时得到的点云数据越多,成像越清晰。以系统标定为基础,采用多线激光雷达获取道路两侧及以上交通标志高度,采用单线激光雷达站点云数据获取高精度输电线路故障数据,大大提高了输电线路故障数据采集质量。
2 系统软件设计
输电线路激光雷达移动测量步骤为:
步骤一:在测量传输线运动时,设置激光雷达与载体刚性相连。
步骤二:将激光雷达线与传输线之间的距离设为先验高度,并设定阈值。
步骤三:采用3D SLAM 算法获取点云数据。
实时3D 激光SLAM 算法流程如图4 所示。
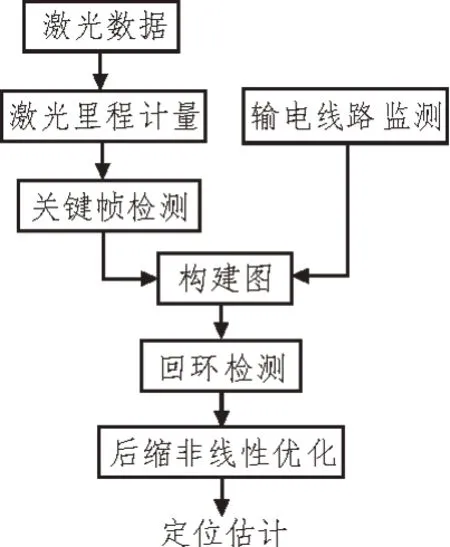
图4 实时3D激光SLAM算法流程
从图4 中可以看出,关键帧检测负责把SLAM 过程表示成位姿图,通过后缩非线性优化利用非线性最小二乘法对位姿图进行优化。
1)位姿图表示
以激光雷达为固定中心,极坐标系周围分布着原始数据,如图5 所示。
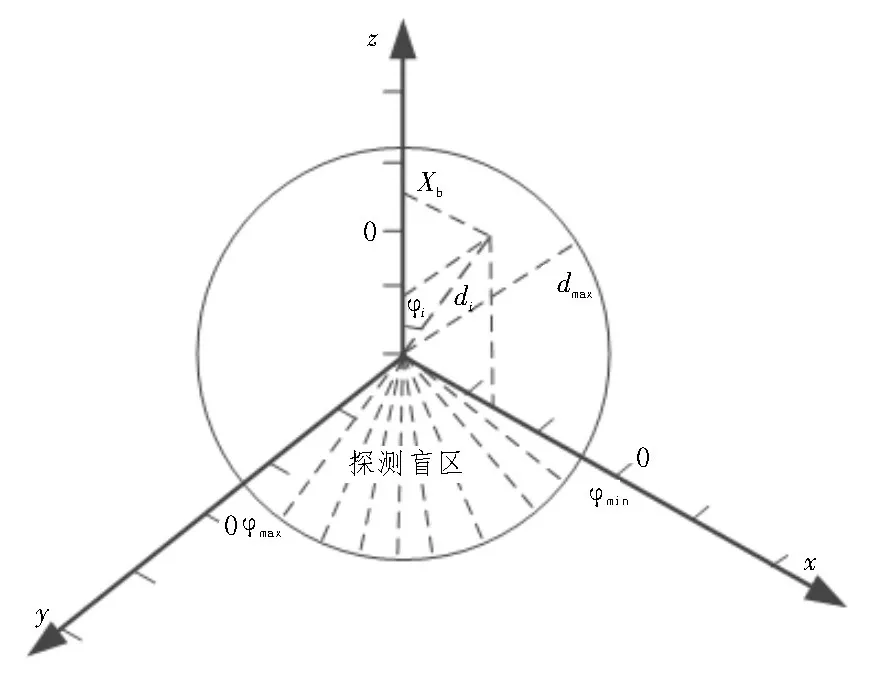
图5 输电线路三维激光雷达测量示意图
由图5 可知,假定载波坐标与激光雷达坐标重合,各坐标数据以(di,φi),i∈[0,n-1]符号表示,以逆时针方向增大,n表示激光束数、量角范围和最大量距。在第一个激光器中,一个符号表示它被测量的距离,另一个符号表示它相对载体坐标的旋转角度。
2)非线性最小二乘法优化求解
以图形为基础的SLAM 过程一般可用非线性最小二乘法表示,如式(1)所示:

式(1)中,ei表示函数。Ωi表示误差函数约束,x则表示若干信息量矩阵。采用非线性最小二乘法和泰勒展开法对误差函数进行了线性化处理。
步骤四:利用SLAM 算法对各点的最近邻点进行搜索,获取最优搜索结果。如果特征值的搜索结果接近,那么点就在球面上。如果搜索到的特征值差别很大,则说明这个点在平面上。当一个特征值的搜索结果与其余特征值有很大差异时,表明该特征值是故障点,以此获取输电线路故障点的准确位置,实现输电线路测量。
3 实验分析
由于强风、暴雨等自然因素的影响或人为破坏,造成传输线故障。施工验收过程中发现,大多数情况下造成电力中断的原因都是在输电线路通道外的树木被自然灾害或人为损坏等落到通道上造成的。在此背景下,对基于3D SLAM 算法的输电线路激光雷达移动测量系统设计合理性进行实验验证分析。
3.1 实验数据设置
在某输电线路上突然出现故障,经人工维修排查到故障情况如图6 所示。

图6 某条输电线路故障情况分析
由图6 可知,该线路上出现两个故障点,采用所提激光雷达移动测量系统,以激光雷达为固定中心,确定故障点的坐标如图7 所示。
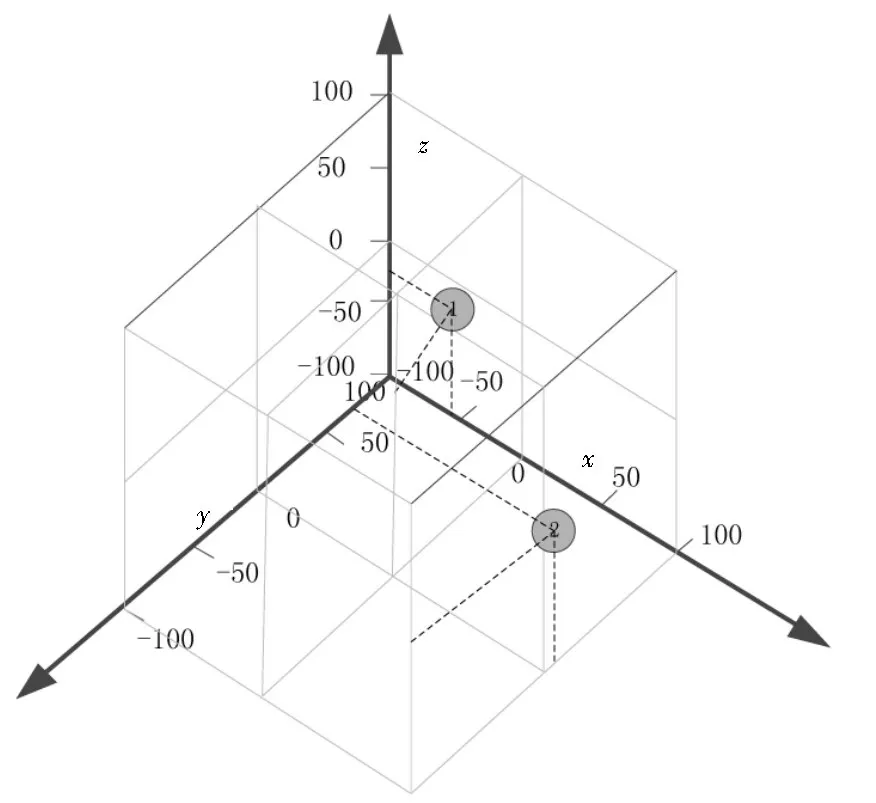
图7 激光雷达移动测量系统故障点坐标
如图7 所示,故障点1 坐标为(-60,100,-30),故障点2 坐标为(100,-80,0)。
3.2 实验结果与分析
分别使用传统输电线路零序阻抗参数测量方法、微分环非接触式测量方法和所研究的3D SLAM算法测量方法对输电线路故障点坐标进行测量,结果如图8 所示。
由图8 可知,使用输电线路零序阻抗参数测量方法故障点1 坐标为(-50,100,-80),故障点2 坐标为(60,50,-75);使用基于微分环输电线路非接触式测量方法故障点1 坐标为(20,100,0),故障点2 坐标为(100,-75,0);使用基于3D SLAM 算法测量系统故障点1 坐标为(-60,100,-30),故障点2 坐标为(100,-80,0),实现结果证明了所设计系统的测量结果精准。
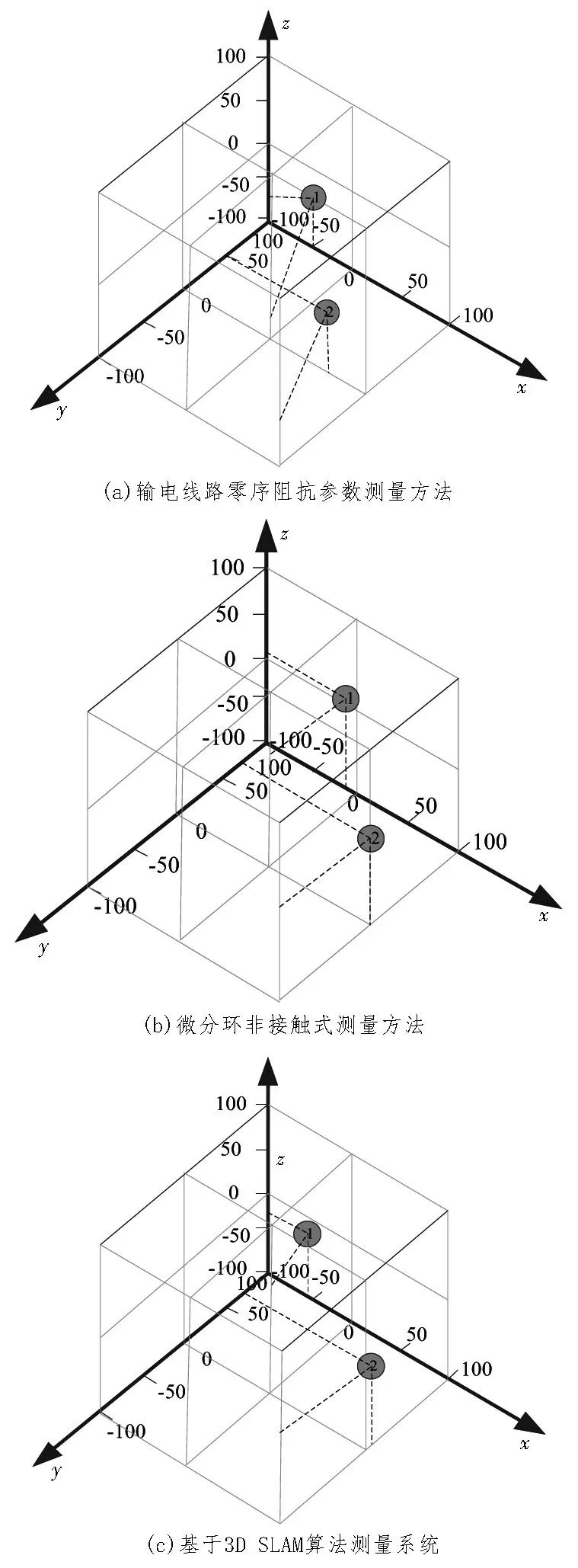
图8 3种方式测量结果分析
4 结束语
采用3D SLAM 算法设计输电线路激光雷达移动测量系统,采取以激光雷达固定中心为中心的极坐标系的方法,能够快速获得传输线区域的三维地形数据。实验结果表明,该测量系统能够准确定位输电线路故障坐标点,提升输电线路的检修精度。该方法不仅在输电线路的验收中发挥了重要的作用,同时还可应用到数字化电网输电线路中,进一步丰富所提方法的应用多样性。
猜你喜欢
汽车观察(2021年8期)2021-09-01
空间科学学报(2020年6期)2020-07-21
燃气涡轮试验与研究(2020年2期)2020-06-20
建材发展导向(2019年5期)2019-09-09
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
电子制作(2018年10期)2018-08-04
电子制作(2018年12期)2018-08-01
山东工业技术(2016年15期)2016-12-01
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
