
基于ZigBee无线网络的机场助航灯在线监测系统设计
2022-09-28 14:49彭卫东苏子钦尹向东温力伟李静菲
电子设计工程 2022年18期
彭卫东,苏子钦,尹向东,温力伟,李静菲
(1.中国民用航空飞行学院机场与基建处,四川广汉 618307;2.中国民用航空飞行学院航空工程学院,四川广汉 618307;3.中国民用航空飞行学院遂宁分院,四川遂宁 629001)
机场助航灯光系统对保障机场和飞机的安全运行有着重要的意义,在机场范围内分布广泛,日益增长的航空器运行需求和机场规模的扩大使灯光系统巡视工作量也变得越来越繁重。国外机场在规划建设时会预先设置布线管道,用来铺设光纤,从而实现对灯光信息的实时监控[1]。但是许多国内的机场在建设初期并未预留布线管道,如果重新布线会严重影响机场的运行,并且光纤通信系统自身及其后期维护的成本都比较高。无线监测节点具有体积小、安装方式灵活、可以适应不同调光器和调光回路、监测单元可靠性更高的优点,既可以避开电力载波受带宽限制传输速度较慢[2]、高频通信无法穿越隔离变压器[3]等现有技术存在的难点和缺陷,又可以省去光纤通信铺设管线所带来的问题。
1 机场助航灯光系统的特点
1.1 布局特点
《国际民用航空公约》(ICAO ANNEX14)[4]中对机场跑道的助航灯布局有明确的规范要求,不考虑中间镶嵌其他种类助航灯的情况下,同类型助航灯之间的间距最大是60 m。4 级机场跑道建议宽度为45 m 以上,最高的4F 级机场跑道含道肩的建议总宽为75 m,助航灯之间的最大间距不会超过60 m。对于助航灯在线监测系统来说只需考虑距离因素,并且当一个节点出现故障后,其后面的节点需要能够做到绕过该节点与上位机进行通信,因此,理论上各节点之间只需要满足120 m 距离的有效通信即可完成基本的监测任务。
1.2 性能特点
助航灯的性能参数有明确的规范和要求,灯具种类分为立式与嵌入式,其中嵌入式灯具嵌入在跑道或滑行道、停止道、机坪地面之中,要求能够承受飞机碾压,无法设置外置天线,而灯具金属壳体、较厚的混凝土层对无线电信号具有很强的屏蔽作用,因此只能将天线设置在外部,且不能对助航灯的功能和飞机运行造成干扰。该文主要研究在立式灯具上进行实时监测的问题。
灯光的亮度设定取决于其与背景的对比程度[4]。由于助航灯使用电流源驱动,对于助航灯主要监测的性能指标是亮度,且助航灯系统对可靠性要求较高,可以采取外置光强传感器读取光强信息,终端设备利用无线传感网络将信息发送至上位机的方式来实现远程无线监测。
2 数据传输无线通信技术
2.1 ZigBee基本特点
现有的几种短距离无线通信方式有Wi-Fi、Bluetooth、ZigBee、NFC、UWB 超宽带、Z-Wave 等[5],这几种通信方式都是现有的物联网技术中常用的通信方式,具体性能对比情况如表1 所示[6]。
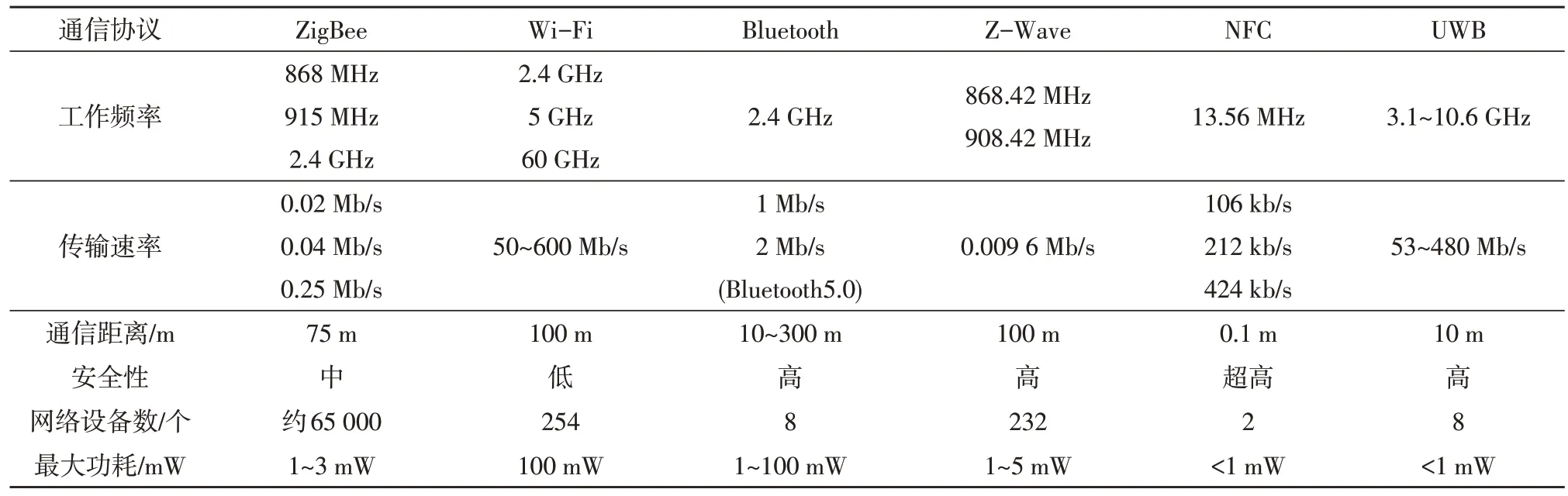
表1 几种短距离通信方式性能数据比较
此外,还有IrDA 和RFID 两种通信方式[7],IrDA的有效距离为1~2 m,且必须在透明可见范围内,即不能有遮挡[8];RFID 只能实现单向的点对点通信[9]。NFC的作用距离太近[10],UWB的适用距离也比较近[11],Wi-Fi 系统安全性较低,且容易受雷电等外界因素干扰[12],无法满足机场助航灯光在线监测系统对可靠性的要求,因此这几种通信方式都不适用。
ZigBee 又名紫蜂协议,具备自动规避故障路径、传输可靠性强、网络节点数多、功耗低、成本低、传输安全性高、开源代码丰富等优点[13]。目前,市场上销售的ZigBee 设备标准通信距离为100 m,而增加功放(通常为CC2591 型)后可以达到1 500 m 以上[14],因此相对于其他短距离通信技术其更适用于对可靠性要求较高,且节点数量多、分布广的机场助航灯光在线监测系统。
2.2 ZigBee对航空通信的干扰分析
航空无线电通信系统所使用的频段有高频(HF)、甚高频(VHF)、特高频(UHF),其中,高频的频率范围是2~29.999 MHz,甚高频是118.000~136.975 MHz,特高频是329.15~335 MHz;此外其他的航空无线电系统还包括GPS系统(工作频率在L1:l 575.42±10 MHz(民用)和L2:1 227.6±10 MHz(军用))和气象雷达(工作频率在X 波段,即5.2~19 GHz,并且在地面时一般不开机)[15]。因此,航空无线电系统并不会对通常工作在2.4 GHz ISM 频段的ZigBee 通信系统构成干扰,同时ZigBee 通信系统因为工作频段的特点和非常低的发射功率,也不会干扰机场和飞机的无线电系统[16]。
3 程序设计
3.1 技术原理
对于助航灯性能的监测指标主要是其光强是否处于标准范围,如果光强偏离了标准范围就可以视为故障。光强的具体检测方法是将光强传感器放置在助航灯的灯光照射范围内,和助航灯保持固定的距离,选择放置的位置时需要尽量减少对飞行员观察的影响,如安装在靠近草坪一侧。这种方式可以做到对助航灯光系统进行非侵入式的改装,既可保证助航灯的可靠性和工作性能又能快速方便地完成安装部署。整个机场的监测节点和协调器组成一个ZigBee 网络,采用网状拓扑结构,并且当一个节点发生故障无法传递信息时,其他节点也能够自动规避故障节点。
3.2 ZigBee模块硬件程序设计
根据技术原理设计出了ZigBee 硬件的程序,使ZigBee设备可以通过传感器测量助航灯的光强、调光机房的光档等信息,并通过无线通信网络将信息传送至监控室的计算机。ZigBee通信协议将模块按设备类型分为协调器、路由器和终端三种[13],而根据该文所描述的机场助航灯监测系统需要实现的任务功能可将模块分为以下三种,以分别制定相应的程序方案:
1)协调器
协调器设置在监控室附近,只用于接收所有终端、路由器发送的数据,并将接收到的数据通过串口传输至计算机,不执行任何监测任务。串口波特率设置为115 200 Baud/s。
2)光强监测器
系统配备了GY-30 型光强传感器,用来监测助航灯的光强情况。光强监测器包含了终端和路由器两种类型的设备,终端只负责监测光强,并定时读取光强传感器的数据后将光强数据“打包”往协调器或路由器发送,发送间隔为0.5 s;路由器则在终端功能的基础上还要额外负责转发其他终端或路由器发送的数据包。数据包的格式如表2 所示,未填满部分均使用“�”字符填充。由于ZigBee 设备数量有限,因此在实验中C15、C17、D11、D12 助航灯从ZigBee光强监测器读取光强数据,其余助航灯使用模拟数据。例如C15 号灯的实时光强为273 lx,则其光强监测器发送的数据包为“C15273”。

表2 光强监测器数据包格式
3)光档监测器
光档监测器设置在调光机房,通过感应调光开关的位置并周期性地发送当前光档信息来实现对光档的实时监测,设备类型为终端,发送的数据包格式为光档监测器标志符(1 位大写英文字母,实验中设置为字母“Z”)+光档(1 位数字,包括0、1、2、3、4、5,其中0 表示关闭)。例如当前助航灯为3 档,则光档监测器会周期性地向协调器发送数据“Z3”。
3.3 监测系统界面设计
助航灯监测系统的上位机界面使用Qt 设计,通过机场轮廓和相应位置助航灯的灯光控件来反映机场所有助航灯的状态。其中,机场轮廓图是用画图软件对某机场的卫星图进行描边得到的,助航灯分布则是根据机场助航灯分布特点虚构设计的,设置了跑道入口灯、跑道边灯、滑行道边灯、跑道末端灯、高光强下滑灯等种类的助航灯共259 盏。模拟数据内容如表3 所示,使用模拟数据的助航灯在收到模拟数据后会自动记录其收到信息的系统时间,而在检测到串口超时后则会将收到信息的系统时间设为0,直到串口连接恢复重新收到模拟数据。助航灯处于超时状态时光强值设为-1,点击区块查看详细数据时该灯光强值会自动显示为“-”以表示没有数据。上位机程序流程图如图1 所示。
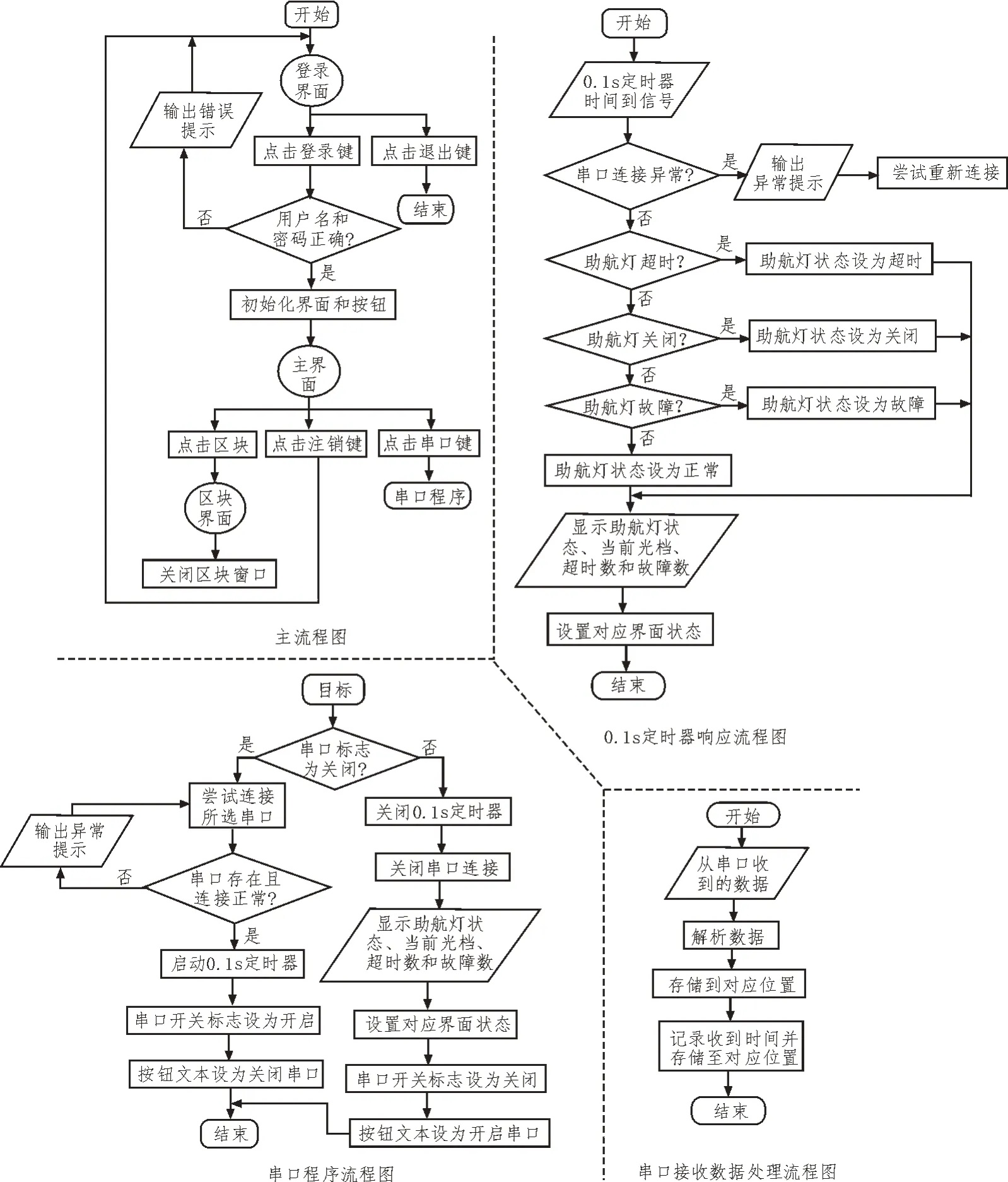
图1 程序流程图
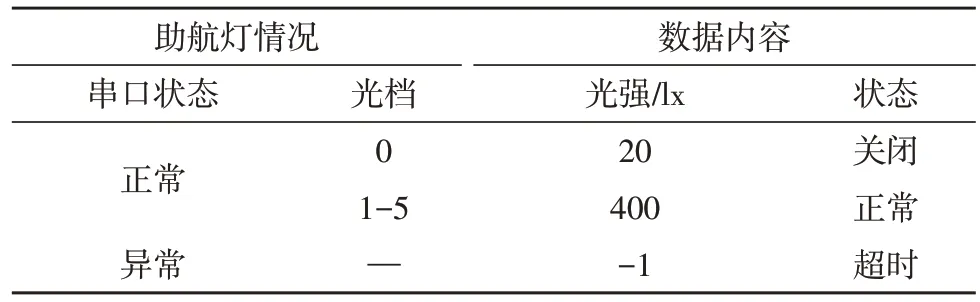
表3 模拟数据内容
程序界面如图2所示,单击区块可以通过弹出的列表窗口来查看区域内所有助航灯的编号、种类、光强值、状态等详细信息,区块颜色变化的逻辑规则如表4 所示。
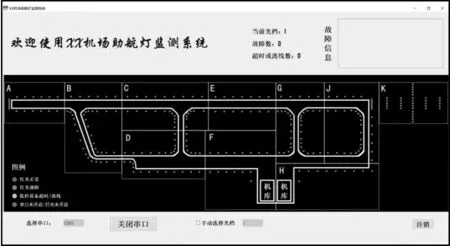
图2 程序界面图
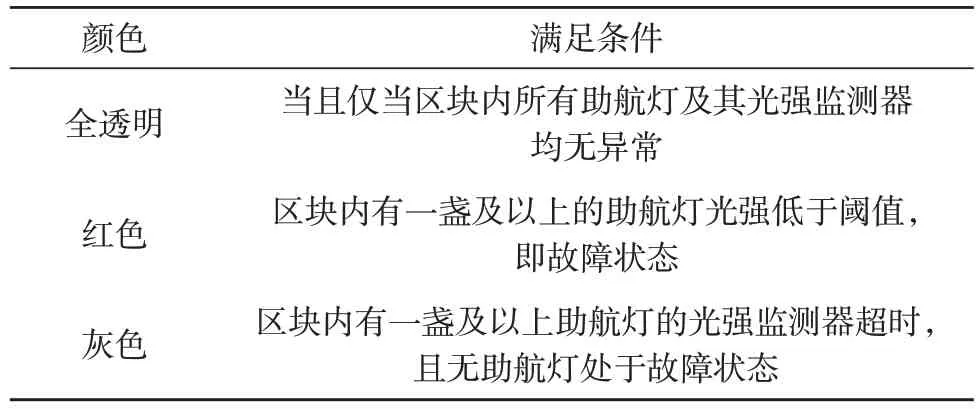
表4 区块颜色变化逻辑规则
程序的其他功能有:
1)统计助航灯的故障数和超时数
程序每刷新一次都会统计助航灯的故障或超时总数并显示在程序上方对应的位置,如果助航灯处于关闭状态则不显示故障数,超时数照常显示,如果串口关闭则均不显示。所有统计到的故障信息将会以列表形式按区块号和数字编号递增的顺序显示在程序右上方的故障信息表中,包括故障助航灯的名称、种类和状态,如果在下一次刷新时恢复正常则会被移出列表。
2)密码与安全保护
在打开程序后首先会弹出一个带有用户名和密码输入框的登录界面,需正确输入用户名和密码后方可登录并跳转到主界面,该部分流程如图1 所示。点击主界面右下方的注销按钮则可退回到登录界面。
3)搜索可用串口、串口掉线警告以及掉线重连
在开启串口前程序会对可用串口进行扫描并显示在下拉选择框中,然后在下拉选择框中点击目标串口完成选择,同时记录下当前选择的串口名,开启串口后则锁定该下拉选择框,并始终保持其显示当前串口名,以实现开启串口后锁定串口选择功能,关闭串口后恢复串口选择功能。如果检测到串口掉线,则每次刷新时都会尝试重新连接先前的串口直到成功。在串口掉线后程序下方会出现一行红字“串口已断开,请检查连接”以提醒用户,并产生超时的模拟数据,如果串口重连成功,则红字消失。
4)手动选择光档
正常情况下,光档是根据光档监测器传递的光档信息自动设置的,手动选择光档的复选框默认为未选择,下拉选择框为锁定状态,如果光档监测器超时(10 s 未收到信息)且串口没有出现掉线,则会在界面下方显示“光档传感暂不可用,请切换至手动”来提醒用户,此时用户需要勾选手动设置光档来解锁下拉选择框,然后在下拉选择框中选择当前的光档来手动设置当前光档。在手动选择光档时,程序将不再处理光档监测器发送的信息,当前光档只取决于手动选择的结果。取消勾选手动选择光档的复选框则恢复为自动根据光档监测器发送的信息设置光档,同时锁定选择光档的下拉选择框。如果在光档监测器超时的同时出现了串口掉线,则优先显示串口掉线时的红字内容。
4 通信测试
通信测试用于验证ZigBee 设备通信的有效性和质量,以判定ZigBee 系统是否适用于助航灯的监测。测试将在夜间根据助航灯的分布特点在相应位置布置灯光、ZigBee 光强监测器、光档传感器和协调器来模拟监测过程,测试选择在与机场真实环境相似的户外环境中进行,节点分布如图3 所示。
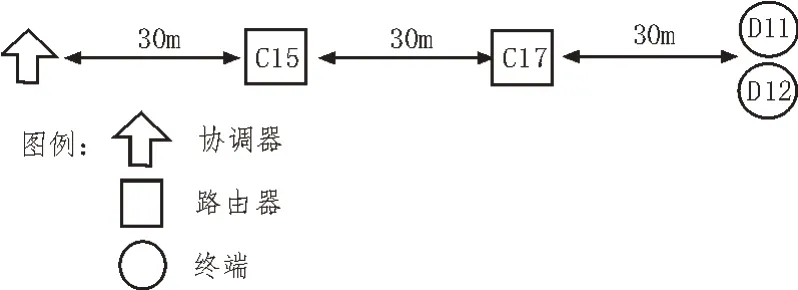
图3 节点分布图
测试中光档调至1 档,光档传感器在协调器附近,首先调整灯光的位置使光强读数稳定在正常值(50 lx)以上,然后调低C17 号灯的亮度来模拟助航灯故障,断开D11 号灯的光强监测器电源来模拟光强监测器故障或超时,测试结果的截图如图4 所示。
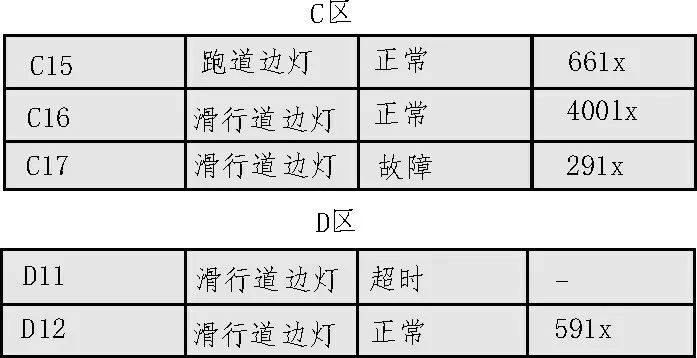
图4 通信测试结果截图
从测试结果可以看出ZigBee 设备可以在户外环境完成对助航灯光强的监测。同时,配备功放来提升发射功率后,能扩大节点的通信范围,从而提升通信质量和系统网络自动规避故障节点的能力。因此,用于机场助航灯监测的ZigBee 设备需配备功放以提升监测网络的健壮性和可靠性。
5 结束语
机场助航灯在线监测系统强调不停航施工,并且安装设备后不能导致助航灯系统的可靠性下降,还需要尽量考虑降低成本和安装所需时间;而ZigBee 因为其自身的性能优点,以及可以搭载包括GY-30 型在内的多种型号数字光强传感器,相比其他短距离通信技术更适合用于机场助航灯在线监测系统。根据监测机制,文中描述了相关硬件设备的技术原理和编程思路,以及上位机程序的界面设计方案、编程思路、判定规则和各种逻辑规则等,在完成编程后,模拟助航灯的不同状态进行联调测试,最后仿照助航灯的分布特点在接近真实机场的环境中进行通信测试。测试结果证明了该文所描述的基于ZigBee 的机场助航灯在线监测系统能够有效完成对机场所有助航灯的实时监测。
猜你喜欢
气象水文海洋仪器(2021年3期)2021-10-15
心声歌刊(2021年4期)2021-10-13
小哥白尼(神奇星球)(2020年6期)2021-01-18
现代计算机(2020年3期)2020-03-05
科技创新与应用(2020年2期)2020-02-14
科学与技术(2019年8期)2019-04-10
三联生活周刊(2017年32期)2017-08-11
数码世界(2017年5期)2017-06-06
IT时代周刊(2015年9期)2015-11-11
军事交通学院学报(2014年11期)2014-12-25
