
气动光学效应图像自适应校正方法与仿真
2022-09-28 09:52:22谢国亚霍雅洁王广川
计算机仿真 2022年8期
何 静,谢国亚,霍雅洁,王广川
(1. 重庆移通学院数理系,重庆 401520;2. 重庆邮电大学理学院,重庆 400065)
1 引言
人类全部的活动以及太阳辐射等各种不同因素所形成的大气会随着大气中风速的变化而变化,最终形成大气湍流运动[1,2]。在实际应用的过程中,由于大气层的存在,在光线没有达到成像窗前,图像中的信息量就会发生十分明显的变化。如果湍流存在,图像会出现抖动以及模糊等问题,为后续进行图像识别和检测带来不可估量的难度。为了有效解决上述问题,国内相关专家给出了一些较好的研究成果,例如盛良睿等人[3]优先借助Matlab对相机的探测特征进行分析,对模糊的相机进行清晰化处理,最终完成气动光学效应校正。李谦等人[4]根据对神经网络输入的预处理,将图像中的低频噪声消除,同时通过双层神经网络对算法进行更新,最终完成图像校正。在上述两种方法的基础上,结合矩匹配算法,提出一种基于矩匹配算法的气动光学效应图像校正算法。经实验测试证明,所提方法不仅可以提升图像整体质量,同时还能更好地完成气动光学效应图像校正。
2 气动光学效应图像校正方法
2.1 气动光学效应图像去噪
通过矩匹配算法不仅可以有效改变气动光学效应图像进行CCD行扫描的方向以及方差取值,同时还能够对图像中的灰度值进行调整[5,6]。
所以,相关专家在已有矩匹配算法的基础上,对其进行改进,详细的操作步骤如下所示:
将窗口的平均取值以及方差进行归一化处理,借助CCD分别探测不同单元的均值以及方差,采用增益以及偏移量对不同探测单元进行校正,最终有效剔除气动光学效应图像的噪声,完成图像去噪。
窗口矩匹配算法优先将气动光学效应图像的噪声转换为传感器中不同探测单元的增益与偏移,同时对两者之间的偏差进行计算。采用式(1)求解气动光学效应图像中的增益和偏差
DNcat-i=NGi·DNraw-i+Bi
(1)
式中,DNraw-i和DNcat-i分别代表原始和经过校正处理后气动光学效应图像中第i个CCD探测单元对应的DN值;Bi代表第i个探测单元对应的偏移值;NGi代表第i个探测单元经过归一化处理的增益值。
求解式(1)的均值和方差,获取的计算式如下
Std(DNcat-i)=NGj·Std(DNraw-i)
(2)
Mean(DNcat-i)=NGj·Mean(DNraw-i)+Bj
(3)
式中,Mean和Std分别代表不同探测单元的平均值以及标准差;Mean(DNcat-i)和Std(DNcat-i)分别代表原始图像和校正后图像的平均值以及方差;Mean(DNraw-i)和Std(DNraw-i)分别代表图像经过滤波处理后获取的第i个探测单元的平均值以及方差;Bj代表第j个探测单元的均值。
将式(2)和式(3)进行联立,则能够获取以下形式的求解结果

(4)
根据小波分析的多分辨率特征,可以将气动光学效应图像划分为高低频两个不同的部分,同时对其进行分离处理。通常使用Mallat算法的离散小波变换完成图像去噪[7,8],借助不同的滤波器分别对气动光学效应图像进行滤波处理;同时还需要对图像进行二次特征提取,最终获取两个距离相同的小波系数。在上述操作的基础上,可以将多层小波分解转换为单一小波分解,重复以上操作步骤,直至图像完成分解为止。
气动光学效应图像进行重构的过程和小波分解是完全不同的,图像重构优先需要对气动光学效应图像进行上采样处理,同时将两个滤波器进行合并,然后对图像进行滤波处理,最终获取上一层对应的低频小波系数。重复以上操作过程,直至得到初始气动光学效应图像为止。
小波变换中一个十分重要的环节就是小波基的选取。通过双正交小波基,即利用一个小波函数进行分解,另外一个小波函数进行重构,这样能够有效提升图像重构精度。另外,信号能量会对应数值比较大的小波系数,噪声则反之。
采用小波软阈值函数分别对不同小波函数进行阈值处理。其中,小波系数比较小的噪声通常将其取值设定为0;反之,将比较大的数值进行收缩处理,确保气动光学效应图像中的噪声得到有效抑制。
以下给出气动光学效应图像去噪的详细操作步骤[9,10]:
1)一级小波分解后气动光学效应图像被划分为四个部分。其中高频带噪声仅仅存在于气动光学效应图像对应的小波系数以及CCD探测单元的方向系数中。为了有效滤除图像中的噪声,优先需要对以上两种系数进行一维离散小波变换处理。
2)对图像中的低频小波系数进行移动窗口矩匹配滤波操作。
3)采用改进的阈值法优先对各个探测单元中的小波系数进行去条带处理,根据软硬阈值函数的取值大小将图像中对应噪声的小波系数取值设定为0,同时进一步对传统阈值算法进行改进,详细的计算式如下
(5)
式中,φ(ω)代表小波系数;ω代表随机方向扫描行的均值。
4)当完成步骤3)的操作后,将步骤3)中得到小波系数和没有进行处理的小波系数两者进行重构,最终得到去噪后的气动光学效应图像。
2.2 基于矩匹配算法的气动光学效应图像校正
理论上而言,气动光学效应图像匹配可以划分为三种不同的形式。其中,比较常用的一种就是灰度匹配[11,12],它具有比较强的抗噪能力且计算速度较快。
设定原始气动光学效应图像f(x,y)的规模为M×N,实时图像g(x,y)的大小为(2m+1)×(2n+1),经过归一化处理后的相关系数可以表示为式(6)的形式

(6)

设定p(a,b)代表随机两幅气动光学效应图像在(a,b)位置的方差,对比实时图和基准图,获取不同位置的方差值。其中,方差取值最小的点就是实时图和基准图中的准确位置,具体计算式如下

(7)
式中,m和n分别代表测量窗口的长度和宽度。
随机两幅图像位置灰度差的绝对值之和Q(a,b)可以表示为式(8)的形式

(8)
通过区域相关归一化矩匹配算法的相关规则,优先需要对实时图以及基准图两者共同对应的共轭子图进行相关匹配计算[13,14]。
灰度分布函数ρ(x,y)的二维第(p+q)阶矩对应的黎曼积分mpq可以表示为以下形式

(9)
式中,xp和yp分别代表取值不同的原点矩阵。
如果ρ(x,y)属于分段连续有界函数,同时在xy平面的有限部分为非零值,则以上定理全部成立,同时阶矩存在唯一解;反之,则ρ(x,y)只能够由mpq确定。
中心矩upq可以表示为式(10)的形式

(10)
指数因子的矩生成函数M(u,v)可以表示以下形式
(11)
为了进一步研究不变量,需要对各个变量x和y进行线性变换,具体如下所示
(12)
式中,α、β、γ以及δ均代表气动光学效应图像矩的不变量。
以下给出基于不变矩的气动光学效应图像匹配算法详细操作步骤:
1)通过尺度和旋转不变特性的矩特征提升图像匹配速度。
2)为了避免图像匹配过程中出现匹配错误的情况,通过圆形图像进行匹配。
3)引入近似亮度因子获取原始图像f(x,y)和灰度图像f′(x,y)之间的近似数学关系,具体的计算式为
f′(x,y)=kf(x,y)
(13)
式中,k代表大于0的正实数。
4)通过金字塔进行逐层搜索,直至完成气动光学效应图像匹配。
原始矩匹配算法设定探测器在光谱响应范围内为一线性响应函数,具体的表达形式如下
X(i,j)=K(i,j)Φ(i,j)+B(i,j)
(14)
式中,Φ(i,j)代表探测源(i,j)所接收到的场景辐射通量;K(i,j)代表探测元的增益;Φ(i,j)代表探测元的偏移量;B(i,j)代表气动光学效应图像的响应输出。
当使用两点进行定标校正时,获取的模型Y(i,j)可以表示为式(15)的形式
Y(i,j)=G(i,j)X(i,j)+O(i,j)
(15)
上式中,G(i,j)代表探测元经过校正后获取的响应值;X(i,j)代表图像经过校正后的增益校正系数;O(i,j)代表图像经过校正后的偏移量校正系数。
考虑到气动光学效应图像的响应特性,可以将式(15)转换为以下的形式
Y(i,j)=G(j)X(i,j)+O(j)
(16)
通过式(16)可知,两个校正系数可以通过矩匹配方法进行推导。其中,整幅气动光学效应图像的均值G(j)和方差O(j)可以表示为以下的形式
(17)
式中,σ(r)和μ(r)分别代表气动光学效应图像的参考值以及方差;σ(j)和μ(j)代表气动光学效应图像第j列像元的均值和方差。
矩匹配以及常见的改进算法都是通过基于单帧实现的,并没有完全考虑到图像序列帧和帧之间的相关性。为此,引入矩匹配算法对气动光学效应图像进行校正[15],详细的操作步骤如图1所示。
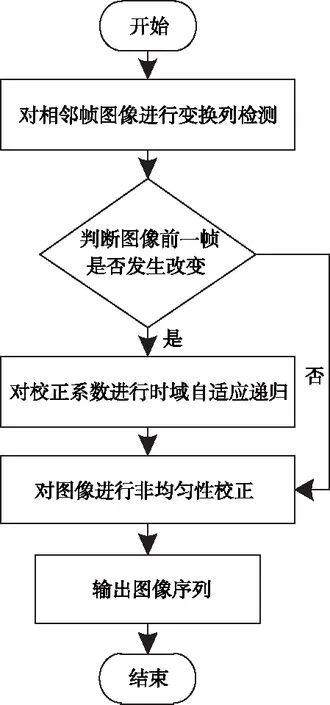
图1 基于矩匹配算法的气动光学效应图像校正流程图
在上述分析的基础上,通过相邻帧对匹配后的图像进行变换列估计,同时在设定的时间内对校正参数进行自适应更新,最终完成气动光学效应图像校正fn(i,j)

(18)
3 仿真研究
为了验证所提基于矩匹配算法的气动光学效应图像校正方法的综合有效性,将文献[3]方法和文献[4]方法作为对比方法,选取图像2作为参考图像:

图2 参考图像
获取不同噪声级别下各个方法对应模糊图像的复原结果,如图3所示:
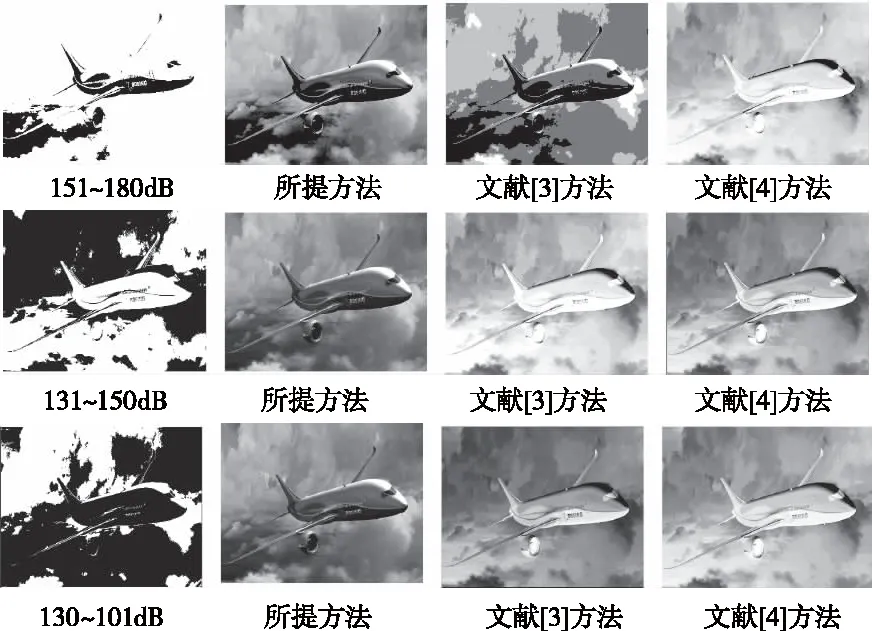
图3 不同方法的气动光学效应图像复原结果
分析图3可知,随着噪声等级的不断增加,各个方法的气动光学效应图像复原结果也发生了十分明显的变化。相比另外两种方法,所提方法能够获取更加满意的图像复原结果。
为了进一步验证所提方法的校正结果,以下对不同方法的图像复原结果进行质量评价,实验选取信噪比、振铃测度以及特征结构相似度作为测试指标。其中,信噪比的取值越大,说明图像质量越好;振铃测度取值越小,说明抑制振铃的效果越好;特征结构相似度的阈值越接近1,说明图像校正效果越好。利用图4给出不同方法的气动光学效应图像校正结果质量评价结果。
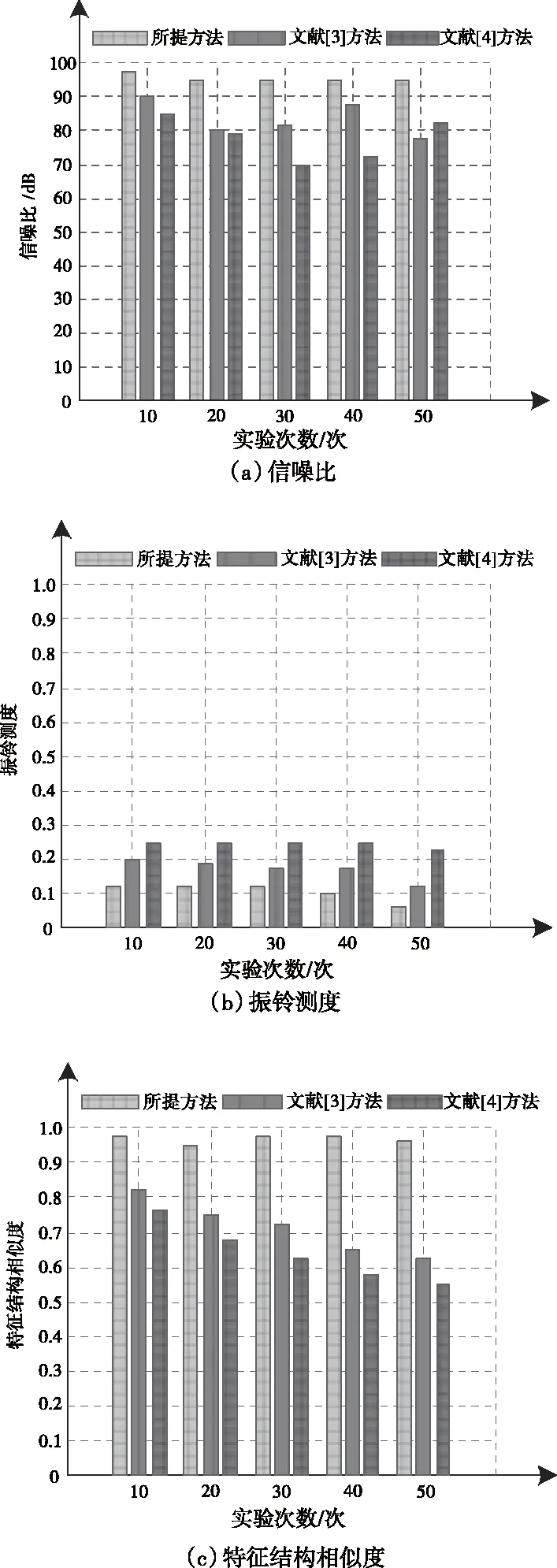
图4 不同方法的图像校正结果质量评价结果
分析图4可知,相比另外两种方法,所提方法能够获取比较高的信噪比,较低的振铃测度以及接近1.0的特征结构相似度。由此可见,所提方法能够获取高质量的气动光学效应图像结果,同时也进一步说明所提方法对气动光学效应图像进行去噪处理是切实可行的,可以有效提升图像质量,获取更加满意的图像校正结果。
4 结束语
针对现有方法存在的一系列问题,提出基于矩匹配算法的气动光学效应图像校正方法。经实验测试证明,所提方法可以有效提升图像质量,获取满意的气动光学效应图像校正结果。在所提方法的基础上,后续将对其进行进一步创新,分别对不同条件下的气动光学效应图像校正进行研究,分析不同环境因素对图像校正结果产生的影响,制定符合需求的校正方法。
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
天然气与石油(2022年4期)2022-09-21 07:05:54
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:06
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
测控技术(2018年9期)2018-11-25 07:44:24
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
航天返回与遥感(2014年1期)2014-07-31 17:55:36
