相敏电子式交流感应电机力矩测控技术研究
2022-09-26 08:05:00罗德虎冉启武郑丁阳
机电信息 2022年18期
罗德虎 冉启武 郑丁阳
(陕西理工大学电气工程学院,陕西汉中 723001)
0 引言
诸多电动设备如电动执行器、电动工具等,需要对输出的推、拉力或转动力矩进行控制。传统方案采取弹簧形变、力敏传感器等实现力矩测控。机械式力矩控制的精度一般为10%~25%,虽然成本低,但受弹簧材料材质、套件加工精度、装配等因素影响较大,且长期稳定性差,不能用作精确检测。采用应变片力敏传感器检测负载力矩实现力矩控制的精度比机械式力矩控制的精度高,为8%~10%,但力敏传感器的输出信号较微弱,检测电路易受干扰,不适用于在电磁场强度高、振动大的环境中工作的设备。而采用检测电机的输出力矩实现对电动设备的力矩控制,精度可达5%~8%,检测电机的力矩在减速传动机构出现故障时,仍能正常检测到电机的输出力矩变化,优于以上两种力矩控制技术。
原有的电机力矩检测技术用电流、电压互感器采集电机的电流、电压信号,经过放大产生与电机电流、电压幅值成正比的信号,用整形电路得到电压、电流上升过零时的脉冲信号,用电压脉冲上升沿启动定时器计数,电流脉冲上升沿停止计数。将电压、电流的幅值信号经过A/D转换送进单片机,然后用单片机计算出电机的实时力矩值。这种技术的电路较复杂,元器件数量多,因此稳定性与可靠性相对较差。对于一些结构紧凑的设备,如精巧型的电动执行器,电子舱体积有限,根本装不下这些电子元件。
为了克服以上缺点,本文提出了相敏电子式力矩检测技术,该技术的电路结构简单,成本低,稳定性与可靠性也远高于现有技术。下文首先介绍该技术的原理,其次进行各个信号检测电路和力矩控制电路的设计,最后展示了三相电机的信号采样示意图。理论研究表明,所提方法可以方便准确地检测电动机力矩,精度也满足实际应用场景要求。
1 相敏电子式力矩检测技术
由于电动设备输出力矩源于电机的电磁力矩,且完全成正比,因此检测和控制电机的输出力矩,即可实现对电动设备的输出力矩控制。交流感应式电机的输出力矩公式计算如下:

式中:U为工作电压;I为电机电流;cos φ为电机的功率因数;η为电机效率。
由此可见,交流电机的输出力矩与电机用电的有功功率UIcos φ成正比,即T∝UIcos φ。检测电机的有功功率变化,即可得到电机的输出力矩变化。
1.1 原理部分
本文所提技术以相敏模拟乘法运算电路对电机的电压U、电流I按相位差φ作乘法运算,即可得到与电机输出力矩成正比的电压信号V(力矩电压信号)。通过给电动设备加载额定的负载力矩T,检测到额定力矩对应的电机力矩信号(V),依此即可得到不同负载力矩对应的电机力矩电压信号V=f(u,i,φ)。根据这一函数,即可实现对负载力矩的控制。相敏电子式交流电机输出力矩检测电路利用模拟运算放大器实现UIcos φ,得到与负载力矩相对应的力矩电压V。
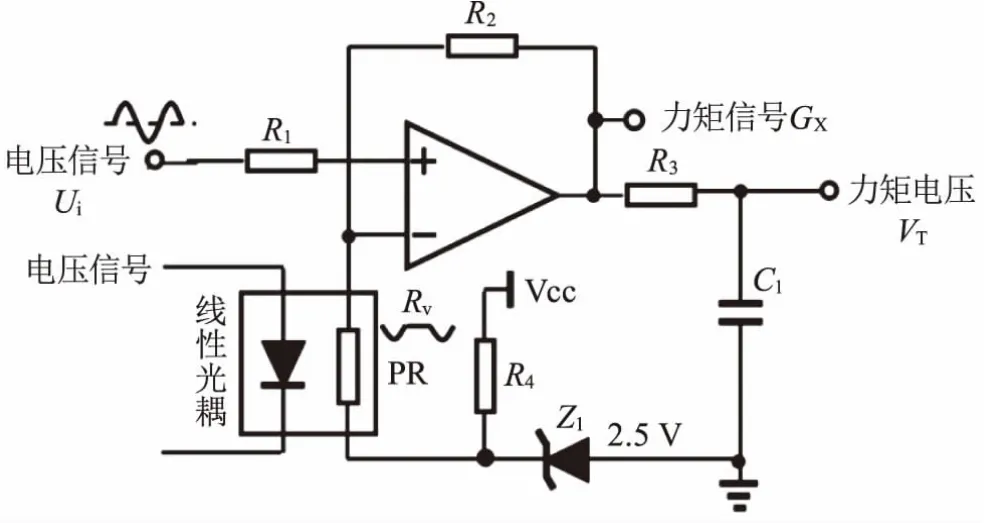
图1为相敏乘法运算电路示意图。放大器的同相端输入信号U是通过霍尔芯片将电机电流转换而来,U是与电机电流大小成正比,相位、频率完全相同的电压信号,反向端为受电源电压控制的线性光敏电阻R。R与R构成了放大器的负反馈回路,确定放大倍数。Z的稳定电压2.5 V串接在反向端R与地之间,当U电压低于2.5 V时,放大器输入的差模电压小于等于0 V,放大器输出为0。
1.2 信号检测处理部分
1.2.1 电压信号U
图2为电流检测电路示意图。电机电流流经一环形磁芯的电感线圈LT,在环形闭合磁路中插入线性霍尔芯片HR。霍尔检测用的电感为环形闭合磁路,信号强度大,抗干扰能力强。霍尔输出信号为2.5~5 V,远大于应变力敏传感器的毫伏级输出。交流电流产生的交变磁场,使霍尔芯片的输出信号U最大变化为0~5 V。

图3为霍尔输出的与电机电流幅频特性完全相似的电压U波形图。电流等于0时,U为2.5 V。U的幅度与电流大小成正比,相位、频率完全相同。

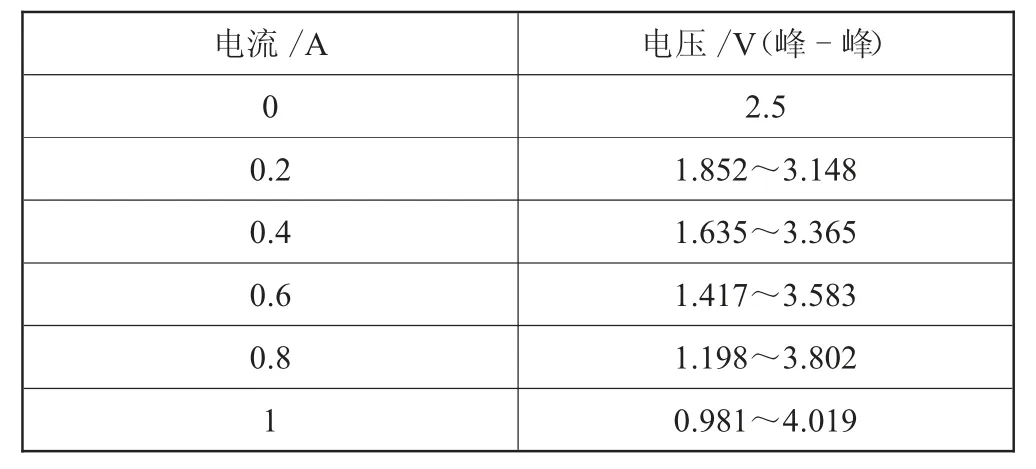
表1为电压信号U与电机电流(以最大1 A为例)对应的实测值。
1.2.2 电阻信号R
为了将电机的电流与电压信号按照相位差通过运算放大器实现乘法运算,这里需要将电机的电源电压变化转换成电阻变化。电阻的大小与电压成反比,频率、相位与电压的正半周相同。
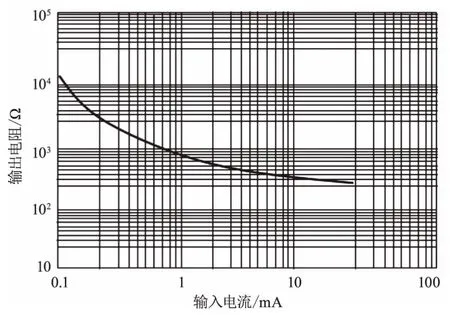
图4中电源经电阻R限流,正半周流经二极管D,驱动线性光耦PR中的发光二极管,电压的高低变化引起发光二极管的亮度变化,光敏电阻的阻值随之变化。电源电压越高,发光二极管的亮度越大,而光敏电阻的阻值越小。光敏电阻不受外部电磁场干扰,稳定性高。
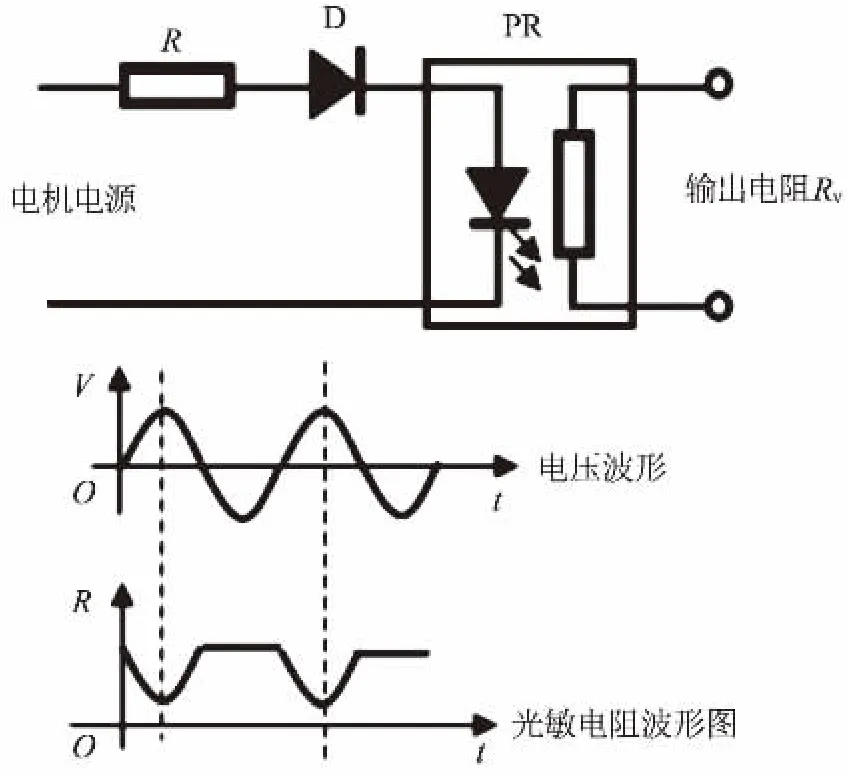
从图5光敏电阻与输入电流变化的曲线图可以看出,输入电流增加,输出电阻下降。例如电源电压为AC220 V,限流电阻R选1.1 MΩ,流经光敏电阻发光二极管的电流约为0.2 mA,这时光敏电阻对应的阻值约为2.5 kΩ。当电源电压以正弦规律变化,光敏电阻阻值以反向的正弦规律变化。
1.2.3 放大倍数
从图1可见电阻R和光敏电阻R一起构成负反馈回路,确定放大器的放大倍数K,K=1+R/R。由于R的阻值随电源电压变化,电压升高,R减小,K增大,因此放大倍数K的变化趋势就与电压变化相同,即频率、相位相同,幅度成正比。
1.2.4 相敏乘法运算
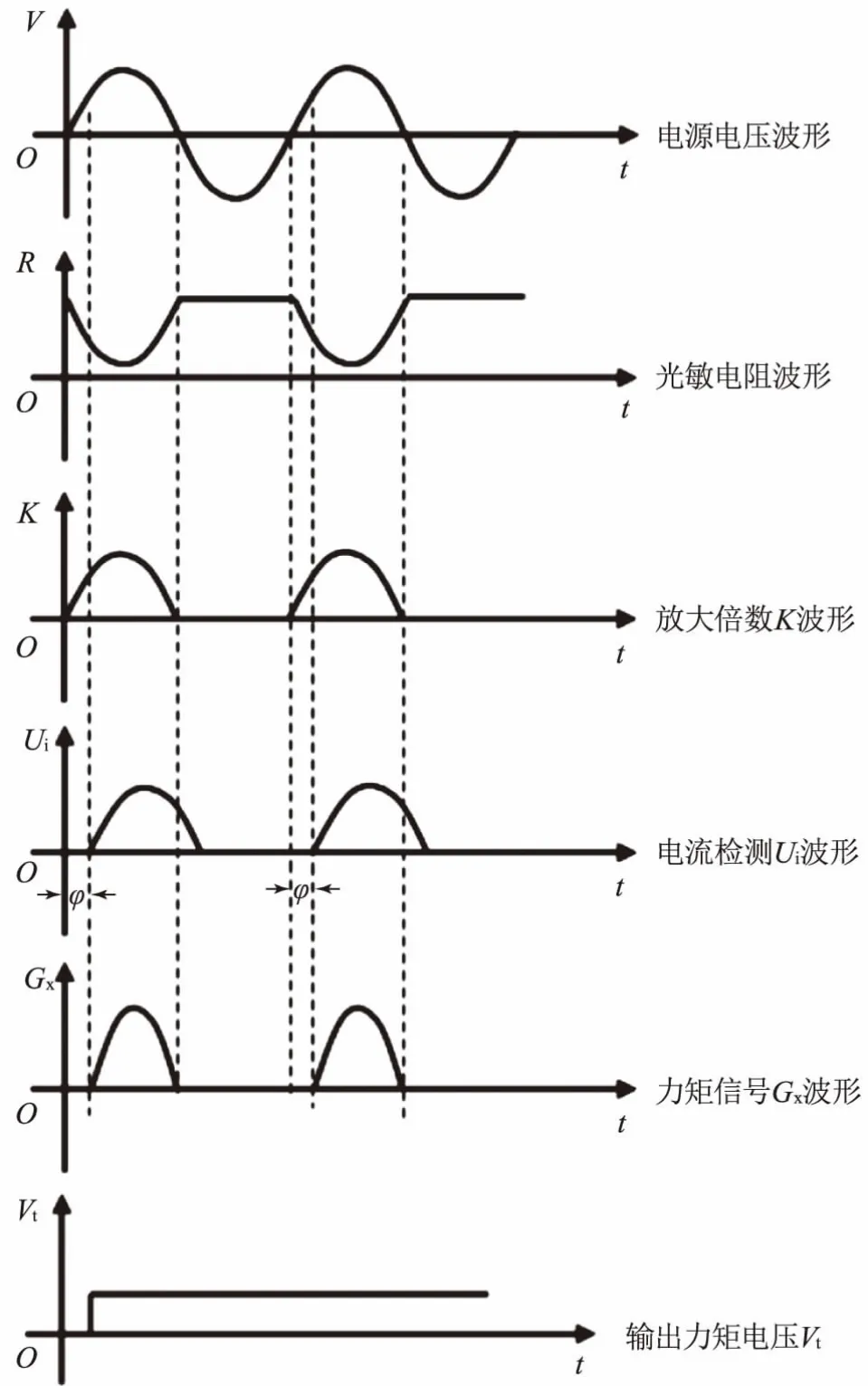
在图1所示的相敏模拟乘法运算放大器中,同相端输入的是电压信号U,电压信号为转换成电阻的R,用以确定放大倍数K。放大器的输出信号G=UK,也就是G=电流×电压。从图6可以看出,放大倍数K与电压的正半周同频率、同相位。电机是感性负载,所以电流滞后于电压相位差φ。φ的大小与电机特性和负载大小有关,负载越小φ越大,反之负载越大φ越小。所以,电机的力矩计算不是简单的电流与电压代数乘,必须要考虑相位差φ的关系。从电压、电流的正半周波形看,只有两者都不为零时才能产生力矩。相敏放大器正好实现了这一功能。当电压信号(放大倍数K)过零为正半周时,电流信号(同向输入)由于滞后φ,所以在此期间放大器没有输出。当电压信号180°到零时(放大倍数为1),尽管电流信号因滞后仍大于零,但放大器已无放大作用。由此可见,相敏模拟乘法运算电路能很好地实现电机输出力矩的计算。G经过RC滤波后的直流电压V,即为与电机输出力矩成正比的力矩信号。
2 力矩控制
相敏电子式力矩检测电路能将电机的负载力矩转换成相应的电压信号V。给电动设备加载额定的负载力矩运行,力矩检测电路可检测到额定的力矩电压V;让电动设备空载运行,可得到空载时的电机输出力矩电压V。V=V-V即设备从空载到满载的力矩电压变化范围。根据设备运行时检测到的实时力矩电压V,即可计算出设备的实时负载力矩。这样就可由用户根据设备的使用工况,选择需要的力矩控制值。
如果仅需要实现简单的力矩控制,也可以将力矩电压V与给定电压V通过电压比较器比较,如图7所示,当V大于V时,比较器的输出电压跳变为低电平。可用比较器的输出信号驱动继电器关断电机,发出报警。

3 三相电机的电压、电流采样
如图8所示,三相电机的电流信号采样和单相电机一样,串在任意一相中。电阻R、R、R阻值都相同,一端分别接三相电源的一相,另一端接在一起形成中性点o。
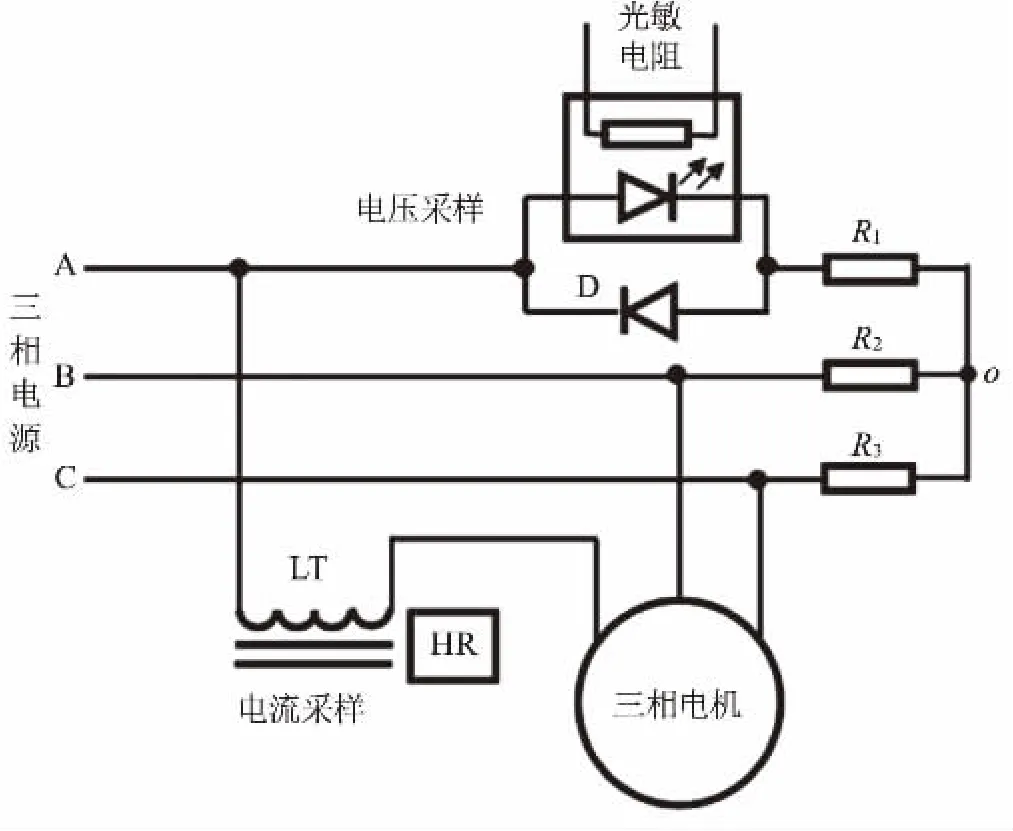
流过发光管电流即为相电压U除以电阻R,光敏电阻阻值跟随相电压变化。电流采样元件LT串接在A相接线中,完成对A相电流的检测。必须保证电流和电压信号的采样为三相电源的同一相。
4 结语
相敏电子式力矩控制技术以相敏式模拟运算放大器为核心,采用线性霍尔芯片检测电流,采用线性光耦将电压转换成电阻信号,以光敏电阻控制放大器的放大倍数,实现了电压、电流的相敏乘法运算,很好地完成了电机输出力矩的检测。该电路结构简单,所用元器件少,稳定性好、可靠性高。霍尔检测用的电感为环形闭合磁路,信号强度大,抗干扰能力强。霍尔输出信号为2.5~5 V,远大于应变力敏传感器的毫伏级输出。光敏电阻不受外部电磁场干扰,稳定性高。该技术可用于单相、三相电机,对不同功率的电机,只需改变霍尔检测电感线圈的线径和匝数。与其他几种电动设备力矩控制技术比较,相敏电子式力矩控制技术的可靠性、稳定性和准确性都有明显的优势。
猜你喜欢
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14 05:53:08
铁道通信信号(2019年5期)2019-10-10 05:02:48
童话王国·文学大师班(2017年6期)2017-07-10 05:54:07
山西青年(2017年8期)2017-01-31 02:45:46
铁道通信信号(2016年7期)2016-06-06 02:21:04
电气化铁道(2016年2期)2016-05-17 03:42:36
太空探索(2015年6期)2015-07-12 12:48:42
物理实验(2014年8期)2014-09-12 00:35:56
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:50
世界科学(2013年6期)2013-03-11 18:09:39