多传感器数据下基于MFDFA-BP的离心泵空化致振故障分析
2022-09-23 01:34:02罗远兴高刚刚曹寒问
振动与冲击 2022年17期
梁 兴,罗远兴,邓 飞,高刚刚,曹寒问
(南昌工程学院 江西省精密驱动与控制重点实验室,南昌 330099)
离心泵是工农业生产中应用较广泛的机械设备,故障等诱发的运行不稳定性不仅会降低泵的效率,严重时甚至导致事故发生。因此,泵的故障诊断向来是研究人员关注的热点问题之一。泵故障诊断常分为三个步骤[1]:先是故障信号的采集;其次是对信号进行特征提取;最后再进行故障识别。其中,选择合理的信号分析方法尤为重要。目前,基于频谱分析的信号特征提取方法应用最为广泛,但该方法常存在3类问题,一是由于离心泵信号本身的非线性非平稳性特点,导致同一信号下不同时段的频谱分析结果存在一定差异;二是频谱分析法常需对信号进行滤波,可能存在有效信号的丢失;三是FFT、小波分析等频谱分析方法本身存在一定缺陷或受适应性限制,导致特征提取结果常存在一定误差[2-4]。为此,本文拟采用多重分形去趋势波动分析法[5](MFDFA)进行特征提取。该方法能够从局部和整体上描述信号的不规则性和自相似性,定量反映不同状态下信号的分形特征[6-7],在信号分析中应用越来越多。譬如,李兆飞等[8]采用MFDFA法提取振动信号的多重分形谱特征参数并结合支持向量机实现了滚动轴承故障诊断。裴峻峰等[9]采用MFDFA法对声信号进行处理,并利用多重分形谱特征参数实现了故障诊断。
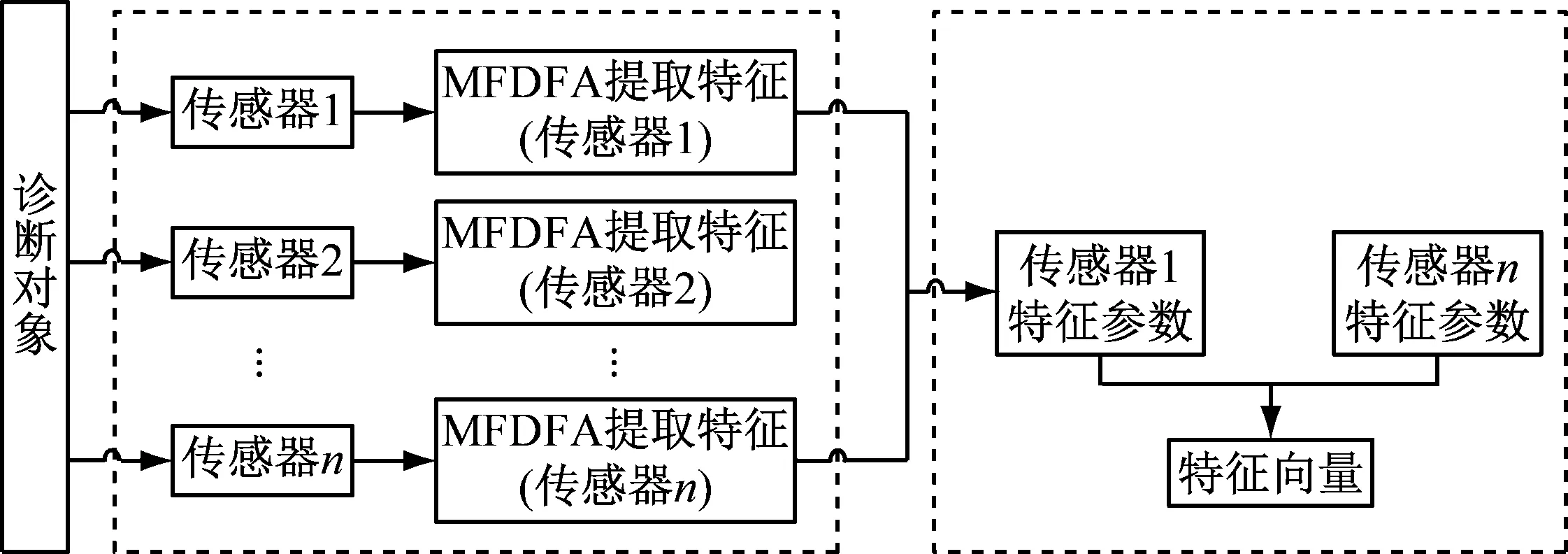
此外,在旋转机械故障诊断中,大多采用单传感器所测信号进行分析。由于离心泵自身的结构复杂性,运行环境又常存在偶然因素,单一信号往往难以保证所获信息的精准性和完整性[10],也未能综合考虑设备整体状态。因此,本文针对空化致振等故障信号,提出了多传感器数据下融合MFDFA法和BP神经网络的诊断方法,即利用MFDFA法分别提取泵振动等实测信号的多重分形谱特征参数Δf、α0、Δα、αmin及αmax,并将各特征参数组成新的特征向量,输入到BP神经网络实现了多传感器离心泵故障诊断,同时对比单传感器故障诊断效果以证明该方法的优越性。
1 MFDFA算法与BP神经网络
1.1 MFDFA算法
MFDFA算法是一种典型的多重分析算法,假设非线性非平稳信号为x(k),k=1,2,3…,N;通过计算信号x(k)的累积离差,可建立新的信号Y(i)
(1)

进而,将Y(i)划分为等长的子区间,每个子区间的长度为s(k+2≤s≤N/4),共有m=N/s个子区间(N为Y(i)的数据长度),为保证m是整数,再从Y(i)的反方向再划分一次,即得2m个子区间。
然后采用最小二乘法拟合第v个子区间数据获得yv(i),为消除第v个子区间的局部趋势,计算第v个子区间数据与yv(i)的均方误差,即当v=1,2…m时,均方误差为
(2)
当v=m+1,m+2…2m时,均方误差为

yv(i)}2
(3)
在式(2)、(3)的基础上,对2m个区间,求均方误差的平均值,可得q阶波动函数
(4)
若信号存在自相似特征,则波动函数Fq(s)与s成幂律关系
Fq(s)∝sh(q)
(5)
式中,h(q)为广义Hurst指数,表征最小二乘法拟合Fq(s)与尺度s的斜率。h(q)随q值的变化而变化,则x(k)具有多重分形特征,否则为单分形特征。
根据Kanterhardt等的研究,广义Hurst指数h(q)与质量指数τ(q)的关系为
τ(q)=qh(q)-1
(6)
利用Legendre变换,可以得到信号的奇异指数α和多重分形谱f(α)
(7)
f(α)=q[α-h(q)]+1
(8)
由奇异指数α和多重分形谱函数f(α)可以得到精准描述多重分形信号动力学行为的重要参数[12],最常用的是α0、Δα、Δf、αmin及αmax。极值点α0表达信号的不规则性,α0越大,信号的不规则程度越高,波动越剧烈;分形谱宽度Δα=αmax-αmin越大,信号的多重分形特征越明显[13],左端点αmin对应波动最大时的奇异指数,右端点αmax对应波动最小时的奇异指数。多重分形谱左、右端点差值Δf=f(αmax)-f(αmin)反映了信号波动剧烈峰值与波动平稳峰值所占比例,比例越大,信号波动性越大。本文通过计算获取Δf、α0、Δα、αmin及αmax作为信号的特征向量。
1.2 BP神经网络
BP神经网络具备处理非线性问题和分类识别的能力,其基本思想是输入训练样本,通过反向传播来不断调整网络的权值和阈值,使网络输出层的误差平方和最小,从而使输出逼近目标[14-16]。一般而言,BP神经网络由输入层x(r个节点)、输出层y(n个节点)和隐含层等3部分组成,其中隐含层的节点数p可根据经验公式P=2×r+1所得。隐含层取S型激活函数,输出层取线性函数[17],训练样本X=(x1,x2…,xn)经过输入层后向前传播,进入隐含层节点经过S型激活函数处理后,会再次向下传播进入到输出层经过函数运算处理得到网络的实际输出Y=(y1,y2,…,yn)。
2 试验装置及多传感器特征数据
离心泵振动测量试验装置如图1所示。离心泵转速为2 900 r/min,流量为11.2 m3/h。该试验装置在泵壳和电机外壳分别安装1个型号为xz860A-20振动传感器,在离心泵轴和电机主轴之间安装了1个型号为TH4803A扭矩传感器和1个XZ11型转速传感器,在泵轴+X、+Y方向各安装了1个摆度传感器,在离心泵的前后进口各安装了1个压力传感器,在管道中部安装了1个流量传感器。
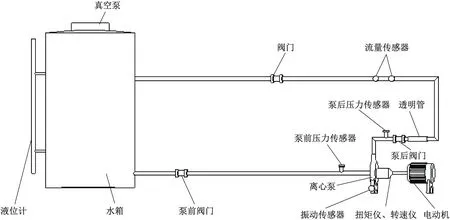
图1 离心泵试验装置Fig.1 Centrifugal pump testing device
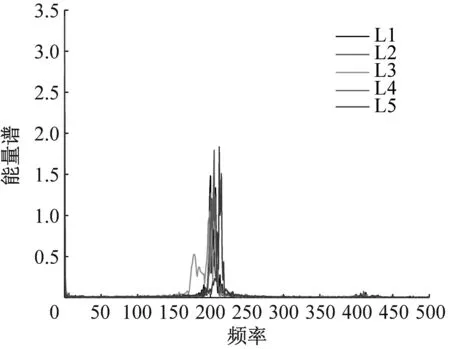
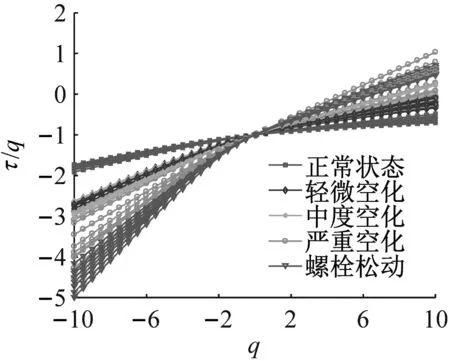
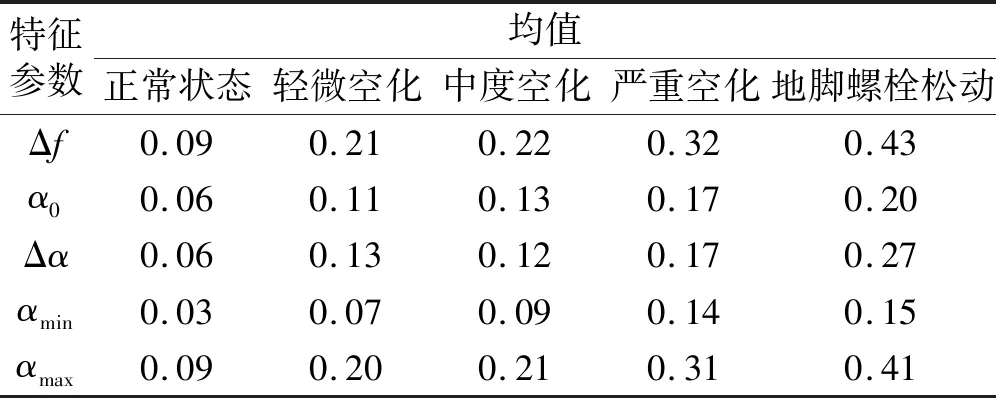
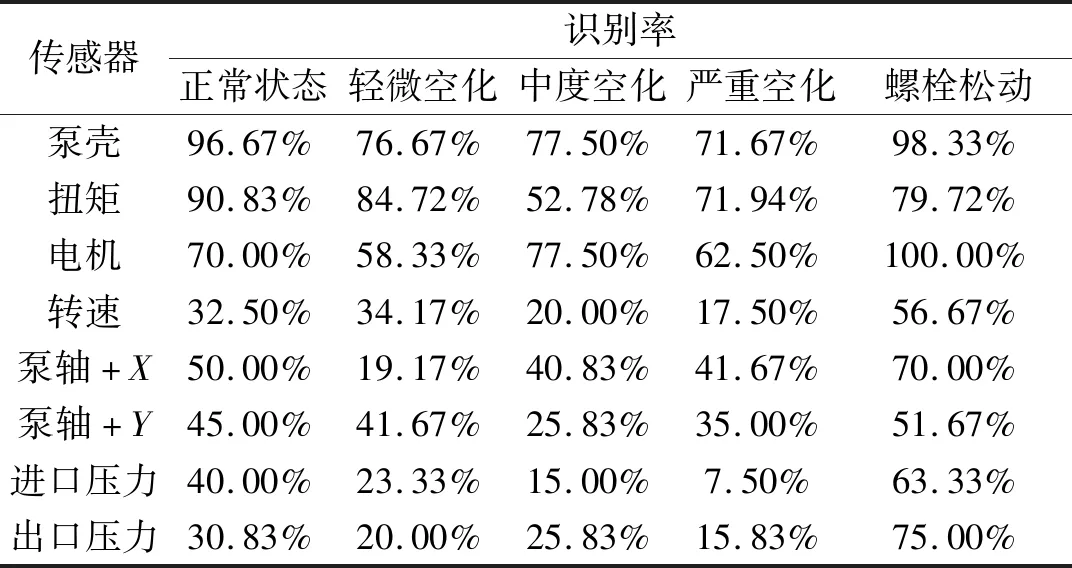
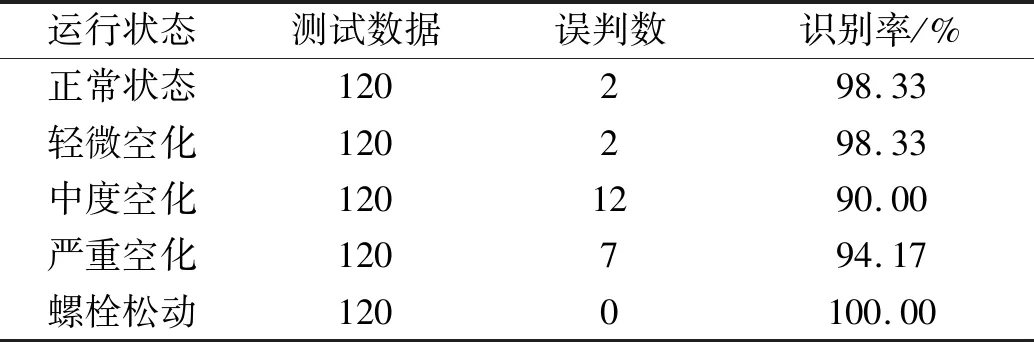
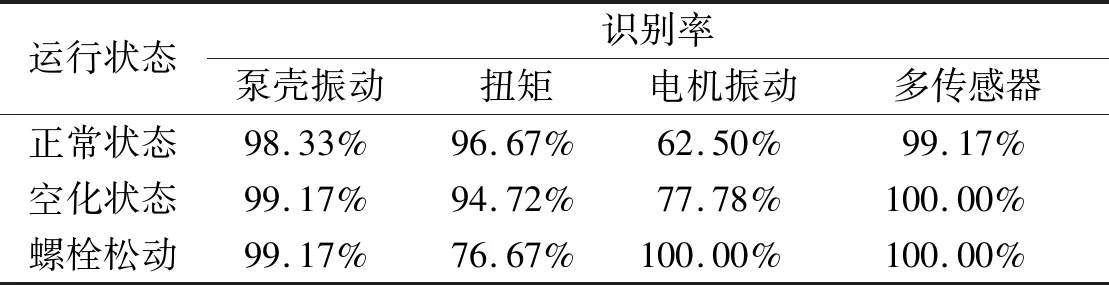
为突出空化故障的独特性及本文方法对离心泵不同故障诊断的适用性,本次试验通过PXI-4472B型动态信号采集仪获取离心泵正常运行状态、轻微空化、中度空化、严重空化、地脚螺栓松动等5种工况进行故障诊断。每种工况测量离心泵振动信号、扭矩信号、电机振动信号等8类信号。地脚螺栓松动故障通过松动水泵及电机底座中间的螺栓,而不同程度的空化故障通过调整真空泵抽气调节泵的进口压力,从而模拟不同进口压力下的空化现象。离心泵是否发生空化以及发生空化的程度可通过离心泵的汽蚀余量NPSH(net positive suction head,NPSH)来定义,通过测量离心泵进、出口的压力和流量,通过公式[18]计算出水泵的有效汽蚀余量NPSHa和必须汽蚀余量NPSHr,发生空化时NPSHa 图2 离心泵空化性能曲线Fig.2 Cavitation performance curve of centrifugal pump 表1 试验工况列表Tab.1 List of test conditions 为避免每类信号丢失自身的分形特征,将各类信号进行MFDFA处理,分别提取出Δf、α0、Δα、αmin及αmax等特征参数,然后将其按序拼接构成特征向量使各个传感器蕴藏的信息均融合在特征向量中,其拼接方法如图3所示。 图3 多传感器信号特征参数拼接方法 以泵壳振动信号为例,分别截取不同时段下中度空化的5组数据,利用FFT进行频谱分析如图4(a)所示;截取不同时段下轻微空化与中度空化各2组数据,并作频谱分析如图4(b)所示。显然,对同一工况,不同时段信号的频谱虽有一定重叠,也仍存在较大的偏移现象;轻微空化的频谱明显与中度空化混叠在一起,区分度极差,不利于准确判断其特征。 (a) 中度空化不同时段频谱分析 (a) q阶质量指数关系图 为此,仍以泵壳振动信号为例,将正常数据和4种故障数据各取10段进行MFDFA处理,其中每段的数据长度均为1 024,子区间s取值为4~256,步长为8,q取值为-10~10,步长为0.5。MFDFA分析结果如图5所示。 从图5可知,5种工况下泵壳振动信号的质量指数τ(q)与q之间存在明显的转折点,其中h(q)是一条随q增大而减小的曲线,f(α)是一条随奇异指数α变化的单峰函数,这均凸显了离心泵实测信号的多重分形特性。另外,5种工况下泵壳振动信号的h(q)和f(α)都存在明显差异,具有不同的形状和位置,故障区分度较显著。但极个别信号仍存在混叠,需采用多传感器信号进行故障诊断。 利用MFDFA法对每种工况分别提取10段泵振动信号,计算相应多重分形谱特征参数Δf、α0、Δα、αmin以及αmax,并将其均值结果列于表2。由表2可知,离心泵故障信号的特征参数均值都远大于正常状态值,其中,地脚螺栓松动故障信号的特征参数均值最大;空化状态下,随着空化程度的增大,其均值逐步增加。以Δf为例,正常工况下其值仅0.09,地脚螺栓松动时其值可达0.43,空化时则由0.21逐步变为0.32。纵向对比,5种参数中,α0和αmin对空化严重程度较敏感,其他3种参数对正常、空化与地脚螺栓松动故障等类型的区分较好。 表2 离心泵振动信号特征参数统计数据Tab.2 Statistical data of characteristic parameters of centrifugal pump vibration signal 离心泵发生故障时,各传感器所测数据对故障反映能力并不一致。为选择合适的测量信号以简化并实现多传感器离心泵故障诊断,将每个传感器实测数据均进行BP神经网络故障识别。即选取5种工况下离心泵8类传感器实测的数据各240组,通过MFDFA法提取每类传感器信号的5个特征参数构成一个特征向量,随机选取其中120个特征向量作为BP神经网络的训练数据,剩余120个作为待诊断数据。由于故障特征向量由5个特征参数构成,试验有5种不同工况,则BP神经网络输入层和输出层的节点数均取为5,隐含层节点数根据经验公式取为11,因此BP网络结构为5×11×5。为避免诊断结果的偶然性,取10次诊断结果的平均值,各组传感器所得结果如表3所示。 表3 单传感器特征向量与BP神经网络结合的离心泵状态识别率Tab.3 State recognition rate of centrifugal pump based on single sensor feature vector and BP neural network 由表3可知,对不同传感器所测信号进行BP神经网络故障识别,其识别率具有较大差异,其中泵壳振动信号、扭矩信号以及电机振动信号能够对离心泵正常状态和不同故障状态进行一定分类,但诊断准确率并不理想。其中,扭矩信号对中度空化识别准确率仅52.78%。而其余传感器所测信号的诊断效果更差,特别是水压力信号由于距离水泵进出口有一定距离,其对空化的敏感度也不高,最低诊断率仅7.50%。显然,上述单一信号故障诊断准确率较低,不能满足工程实际需求。 根据3.2节分析结果,选择泵壳振动信号、扭矩信号及电机振动信号等3类传感器数据进行多传感器离心泵故障诊断。利用图2所示拼接方法,将3类信号所获得的5个特征参数综合构成一个新的特征向量,网络结构选取为15×31×5。同样选取每种工况120个新特征向量作为BP神经网络的训练数据,另外120个作为待诊断数据。故障分类结果如图6所示,诊断结果如表4所示。 图6 BP神经网络故障分类情况Fig.6 BP neural network fault classification situation 表4 多传感器特征向量与BP神经网络结合的离心泵状态识别率Tab.4 State recognition rate of centrifugal pump based on multi-sensor feature vector and BP neural network 由图6和表4可知,基于多传感器数据的故障诊断方法能够实现离心泵运行状态的准确诊断。相较于单传感器中的最高识别率,多传感器故障诊断对离心泵正常状态、轻微空化、中度空化以及严重空化的识别率分别提高了1.66%、13.61%、12.50%以及22.23%。而离心泵处于地脚螺栓松动故障时,虽然单传感器信号诊断识别率较高,但仅有电机振动信号识别率能和多传感器识别率一样达到100%。值得注意的是,若不对空化程度进行细分,由图6可看出,轻微空化、中度空化以及严重空化出现误诊断时仅在于相互之间的混淆,空化未被误诊断为正常或地脚螺栓松动工况,空化信号识别准确率可达100%,表5给出仅考虑离心泵正常状态、空化状态以及地脚螺栓松动状态3种工况的单传感器和多传感器的离心泵故障诊断结果。 表5 空化程度未细分时单传感器与多传感器的离心泵故障诊断率 由表5可知,单传感器对3种工况的最高识别率分别达到98.33%、99.17%以及99.17%,而多传感器对正常状态和螺栓松动状态的识别率分别为99.17%和100%,对空化状态的识别率与图6分析一致可达100%。显然,对比表3、表4以及表5的识别率可知,若不对空化程度进行细分时,能够提高离心泵正常状态、空化状态以及螺栓松动3种工况的状态识别率,而对空化程度进行细分时,由于不同空化程度对泵的危害不同,相应的处理方法也有差异,会造成各工况的状态识别率产生一定的误差,而由表4可知多传感器诊断模型对空化细节识别具有较强的应用价值。 本文提出多传感器数据下MFDFA与BP神经网络相结合的离心泵故障诊断方法,并用试验证实了方法的有效性,获得了以下结论: (1) 证明了离心泵故障信号具有多重分形特性,对空化等故障而言,泵壳振动、电机振动及扭矩等信号更能反映故障信息。 (2) MFDFA提取的多重分形谱特征参数Δf、α0、Δα、αmin及αmax能够直接分析原始信号,并准确获取泵的运行信息。其中,Δf、Δα和αmax对正常、空化及地脚螺栓松动等不同类型故障识别更好,而α0和αmin则对空化程度的识别更准确。 (3) 该方法避免了单传感器隐含信息单一、诊断准确率较差等缺陷,有效提升了诊断准确性,其中空化程度未细分时,其最低诊断准确率为99.17%,而空化程度进行细分时,对故障识别的准确率提高了13%以上,可作为一种稳定的故障诊断模型,为故障诊断研究提供了一种新的思路。

3 实例分析
3.1 信号特征提取分析
3.2 单传感器数据故障诊断
3.3 多传感器数据故障诊断

4 结 论
猜你喜欢
钢铁钒钛(2023年5期)2023-11-17 08:48:34
水泵技术(2021年5期)2021-12-31 05:26:48
水泵技术(2021年5期)2021-12-31 05:26:40
中国特种设备安全(2021年5期)2021-11-06 05:09:00
防爆电机(2021年5期)2021-11-04 08:16:34
水泵技术(2021年3期)2021-08-14 02:09:18
装备制造技术(2021年4期)2021-08-05 07:39:54
制造技术与机床(2017年11期)2017-12-18 06:46:39
厦门理工学院学报(2016年1期)2016-12-01 04:50:53
水利科技与经济(2016年7期)2016-04-25 13:03:00