基于Kubernetes的RISC-V异构集群云任务调度系统①
2022-09-20 04:10蒋筱斌熊轶翔侯朋朋武延军
计算机系统应用 2022年9期
蒋筱斌, 熊轶翔, 张 珩, 侯朋朋, 武延军, 赵 琛
1(中国科学院 软件研究所, 北京 100190)
2(中国科学院大学, 北京 100049)
1 引言
大数据时代主体表现为数据的整体体量、发展速度和种类都呈现井喷式增长, 随着计算任务所需要处理的数据规模急剧增加, 计算模式从单机多处理器的并行计算发展到多机的分布式计算, 网格计算和云计算. 如今, 云计算以其最少的资源支持最大的用户体量和提供弹性化服务的优势成为最为热门的技术之一[1].云计算是基于TCP/IP通信协议的将多种计算机技术高度集成的产物, 提供对高性能处理器单元、大容量的分布式内存、高速网络等硬件资源的统一化服务抽象和虚拟系统架构平台[2]. 云计算的核心是虚拟化技术, 将硬件资源抽象成一个巨大的资源池, 对资源进行统一的管理和调度、按需分配, 实现动态的、可弹性伸缩性的、安全的云服务.
作为一种轻量级的虚拟化技术, Docker具有高速、轻量、扩展性强、快速交付等特点[3]. 与传统虚拟化技术不同, 传统虚拟化技术需要虚拟出硬件并在硬件上运行一套完整的操作系统; 而Docker类似于一个应用进程直接运行在宿主机的内核系统上, Docker容器本身没有硬件虚拟和内核系统, 通过Linux Cgroups机制确定允许容器消耗的资源(如CPU、内存和网络)限制[4,5]. Docker容器通过Docker Image镜像进行创建, 容器中包含了应用程序及其所需的整个工具链,并通过类似于Linux Namespace机制进行空间隔离, 以保证多个应用程序之间隔离运行, 因此多个容器可以复用宿主机的硬件和内核系统, 极大的简化了容器的创建、维护和迁移.
容器通过容器编排工具部署到集群的节点上, 目前较为流行的容器编排工具有Docker Swarm、Mesos、Kubernetes等. 考虑到Kubernetes是目前应用最为广泛的开源容器编排工具之一, 本文选择以Kubernetes[6]为基础开展RISC-V开源指令集架构的适配和云任务调度器优化研究工作. Kubernetes是一个可移植的、可扩展的开源平台, 用于管理容器化的工作负载和服务.Kubernetes工作过程由Master节点内部的kubecontroller-manager组件对集群中Node (节点)、Pod、Namespace (命名空间)等对象资源进行统计和管理, 并将待调度的Pod交由kube-scheduler进行调度, 最终实现Pod与工作节点之间的绑定. 本文主要聚焦Kubernetes的任务调度器开展性能优化和功能扩展方案研究.
RISC-V是2010年美国加州大学伯克利分校研发并推出的RISC (精简指令集)第5代架构. 因为其开源性、简洁性、模块性和可扩展性, 吸引了无数产业界和工业界的研究人员的关注. 近几年里国内外涌现了许多突破性的成果, 如阿里巴巴平头哥研发的基于RISC-V的高性能处理器“玄铁-910”[7], 中国科学院计算技术研究所在RISC-V中国峰会上发布的开源高性能RISC-V 处理器核“香山”[8], 佐治亚理工大学在ACM微体系结构国际会议上开源基于RISC-V的GPU实现Vortex GPU[9]等. 随着云计算、边缘计算等领域的不断发展, 带动了大量碎片化的IoT芯片需求, 这些微体系结构且具有特定功能的IoT芯片与RISC-V开源性、简洁性、模块性和可扩展性的特点完美契合.随着RISC-V指令集架构的芯片设备日益增多, 亟需将RISC-V架构计算节点加入基于容器的云服务环境,充分地融合这类RISC-V架构设备算力, 以提供合理高效的资源分配和计算任务协作, 这类需求已成为目前分布式容器编排平台的一大技术难点和挑战. 与ARM/X86架构不同, RISC-V指令集并不是用一套统一的架构来满足各种不同的需求, 它采用模块化的方式进行组织, 用以提供根据用户计算需求的可扩展性指令集; 其中, 每一个模块都使用一个英文来表示, 共包括4个基础指令集和6个已获批的扩展指令集. 除此之外, RISC-V还有多个正在不断完善的扩展指令集.如最为广泛应用的V (向量)扩展[10], 比传统的单指令多数据(SIMD)指令更具优势, 解决了SIMD指令集冗余和上层软件适配的问题. H (Hypervisor)扩展[11]支持监控程序, 提高了在单机上虚拟化部署多个操作系统的效率, 为搭载RISC-V芯片的虚拟化优化提供了可能.
目前的容器编排工具都不具备调度RISC-V指令集架构需求的任务, 尤其是RISC-V提供了用户自定义的扩展指令集的加入, 更是增加了调度的难度. 以最新版本Kubernetes为例, 将容器部署到具有异构节点的集群中将会导致容器镜像的拉取失败或是应用程序的运行失败. 标签式的调度方案可以解决粗粒度的架构选择, 但是无法实现RISC-V多种扩展指令集ISA匹配. 以V (Vector)扩展指令集为例, 与当前ARM/X86架构不同, RISC-V的V扩展指令提供了向量化计算,能够为向量计算和标量计算提供单指令多数据(SIMD)运算单元, 且不限于特定的向量长度, 能够为矩阵运算、机器学习、多媒体分析等提供指令集加速. 然而,当前的Kubernetes无法根据计算任务的特征来匹配具有该指令集特征的计算单元, 即无法做到节点内的指令集感知来调度至具备V扩展指令集的RISC-V计算节点, 因此将会导致Kubernates中集群的RISC-V计算资源浪费.
为解决上述问题, 本文提出了一种基于Kubernetes异构ISA指令集感知的集群调度系统, 它主要由指令集感知(ISAMatch)模型来处理任务在异构ISA指令集架构节点中的调度. 具体地, 本文所设计的Kubernetes集群调度系统通过对集群内的计算节点的所有指令集提供探测核实, 并根据指令集亲和性和任务优先级来自动识别任务所需指令集架构和节点架构的亲和程度,进而找到集群中匹配程度最高的节点. 本文整体系统设计基于开源项目Volcano调度器进行实现, ISAMatch模型与Volcano调度器的其余插件完全兼容, 可由集群管理员动态选择是否开启ISAMatch模型. 在ISAMatch模型的支持下, Volcano调度器可以很准确的将任务部署到对应架构的节点上, 并提高了调度性能和集群资源利用率.
本文的主要贡献总结如下:
(1) 调研Kubernetes的多种同构和异构资源调度策略和多种ISA指令集架构特点.
(2) 提出ISAMatch模型, 它能够准确的找到匹配任务ISA的节点列表并选择最佳匹配节点.
(3) 基于Volcano调度器实现了一个具有ISA感知能力的分布式异构云平台调度系统.
(4) 通过详细实验验证, 本文对所实现的云计算调度平台可以显著地避免任务在异构节点中的部署失败,相对比默认调度器正确率62% (调度RISC-V基础指令集任务)、41% (调度RISC-V扩展指令集任务)、67% (调度RISC-V扩展指令集任务且有“RISC-V”节点匹配标签), 在不考虑资源限制的条件下, ISAMatch模型可以达到100%的任务调度正确率, 以此达到提高了集群资源利用率的效果.
2 相关工作及挑战
2.1 同构资源调度机制研究现状
同构资源的资源调度策略更注重资源调度的结果评估, 如资源利用率和集群负载均衡等. 目前, 云计算在同构资源调度领域的研究都集中在两个方向上.
(1)根据各种调度算法及算法改进对资源进行合理调度; 同时, 还要对云平台的实时状态进行评估, 判断部分任务是否需要重新调度. 例如, Ge等人[12]将系统工作负载、任务队列和预测的执行时间作为输入,调度器运用遗传算法生成最优调度方案; Zuo等人[13]提出了一种改进的蚁群算法解决最优调度问题, 使用任务完成时间和预算作为约束函数来评估成本以防止蚁群算法陷入局部最优解困境, 最终对调度方案提供反馈.
(2)根据服务器负载的周期性, 通常采用机器学习算法, 对集群收集到的时序和历史负载信息进行分析,寻找合适的调度方案. 何龙等人[14]通过记录各个Pod对资源的使用情况, 在后续的调度过程中, 通过历史数据对调度的打分策略提供指导; Berral等人[15]采用机器学习算法, 对过往系统运行状态进行分析, 通过模型预测得出的功耗、CPU负载和SLA时间调整调度决策.
2.2 异构资源调度机制研究现状
随着数据中心的计算节点技术架构和用户服务需求的不断变革, 为用户特定任务提供特定计算单元的异构资源系统已逐渐成为当前的主流计算模式, 例如GPU (graphic processing unit)服务器用于深度学习训练、NPU (neural processing unit)节点用于神经网络推测以及DPU (data processing unit)用于数据资源的存储和计算服务. 面向这类融合XPU算力资源的资源调度策略更注重异构资源本身的算力特殊性. 近年的系统领域和计算机体系结构领域的研究成果大量集中在GPU、FPGA等异构计算单元的芯片设备上.
AntMan[16]是阿里巴巴提出的一款具有动态缩放机制的集群异构资源调度器, 旨在解决在生产环境中GPU集群资源利用率低下的问题. AntMan从动态显存管理和动态计算管理两个维度进行设计. 动态内存管理为了适应深度学习作业中不断变化的内存需求,将部分显存内容转移到CPU内存中计算, 以实现高优先级任务的优先计算. 动态计算管理采用穿插运行模式, 高优先级任务运行时, GpuOpManager组件实时监控任务在GPU上运行的时间和空闲间隙, 低优先级任务穿插间隙执行.
GaiaGPU[17]是腾讯公司设计的一款细粒度异构资源调度系统. 一改传统异构设备的完整调度(1 GPU),将异构设备进一步细粒度化的切分调度(0.x GPU). 在细粒度调度的基础上, 充分考虑多异构设备通信延迟,构建GPU集群拓扑结构, 针对申请小于1 GPU、申请等于1 GPU和申请大于1 GPU三种状态分别讨论, 实现GPU资源的最大利用率和通信的最小延迟.
KubeHICE[18]是Yang等人提出的一款基于ARM/X86的异构ISA指令集架构的边缘计算资源调度平台. KubeHICE通过请求的YAML文件中镜像的名称以及镜像详细信息包括镜像编号、架构等是否带有架构相关信息来选择合适的ISA指令集设备. 在ISA指令集架构感知的基础上, KubeHICE还讨论不同ISA指令集架构芯片的算力, 根据单核算力重新定义资源数量以实现集群计算资源的负载均衡. 然而, KubeHICE策略未考虑到同名异构的镜像调度, 同时, 指令集只针对了通用指令集, 未充分考虑到多种扩展指令集.
除了对具体异构设备资源调度的研究, 还有在异构环境下单任务切分的资源调度研究. Boran等人[19]通过将任务进行细粒度分割, 针对任务在不同阶段的运行特性, 对任务迁移至不同的异构设备中运行, 实现任务的最佳运行效率.
2.3 RISC-V概述
RISC-V作为RISC (精简指令集)第5代架构, 于2012年由Berkeley团队[20]提出, 旨在解决当前ISA指令集架构的过于庞杂、商业化闭源、灵活性缺失等一系列技术问题. 与ARM/X86等主流指令集架构相比,RISC-V指令集架构作为新兴指令集架构具有精简化、模块化、开源化[21]3大突出特点.
(1) RISC-V遵循“大道至简”的设计哲学[22]. 主流指令集架构在不断发展中为了可以向后兼容, 在原有的指令集中添加新的指令, 使得指令集文档过于冗余.据统计, X86指令集文档约5 000多页, 而同样基于RISC架构的ARM指令集文档也拥有2 700多页. RISC-V摒弃了向后兼容的历史包袱, 采用“基本指令集+扩展指令集”的模式, 基础的基本指令集仅40余条, RISC-V指令集手册也只有200多页[21].
(2) RISC-V采用模块化的指令集设计模式, 采用“基本指令集+扩展指令集”的设计思想, 不仅精简了指令集数量, 还可以自由定制所需的指令集. RISC-V架构的处理器设计人员可以根据需要选择是否需要添加这些扩展指令, 尤其适用于具有特定功能的物联网芯片, 降低了芯片的开发周期和成本.
(3) RISC-V遵守开放开源原则, 与ARM和X86收取高额的专利费相比, 允许芯片开发人员根据自身需求自由修改开源代码, 并可直接用于商业活动, 降低了RISC-V的开发成本和门槛.
2.4 挑战
图1展示了Kubernetes在异构ISA指令集架构环境下的任务创建时调度过程, 开发者将带有应用程序和开发环境的镜像打包上传至镜像仓库中, 通过编写YAML文件生成Pod等待集群调度, controller整合Pod信息通过调度算法与具体工作节点进行绑定, 由绑定节点的kubelet从镜像仓库中拉取对应架构的镜像生成执行Pod, 通常镜像仓库针对某一基础镜像都有多种架构选择, kubelet会选择与节点自身架构相同的架构进行拉取. 然而, 在调度过程中, 现有的调度器无法判断应用程序所需ISA指令集架构, 因此存在镜像拉取失败或者运行环境错误的调度失败的可能性.
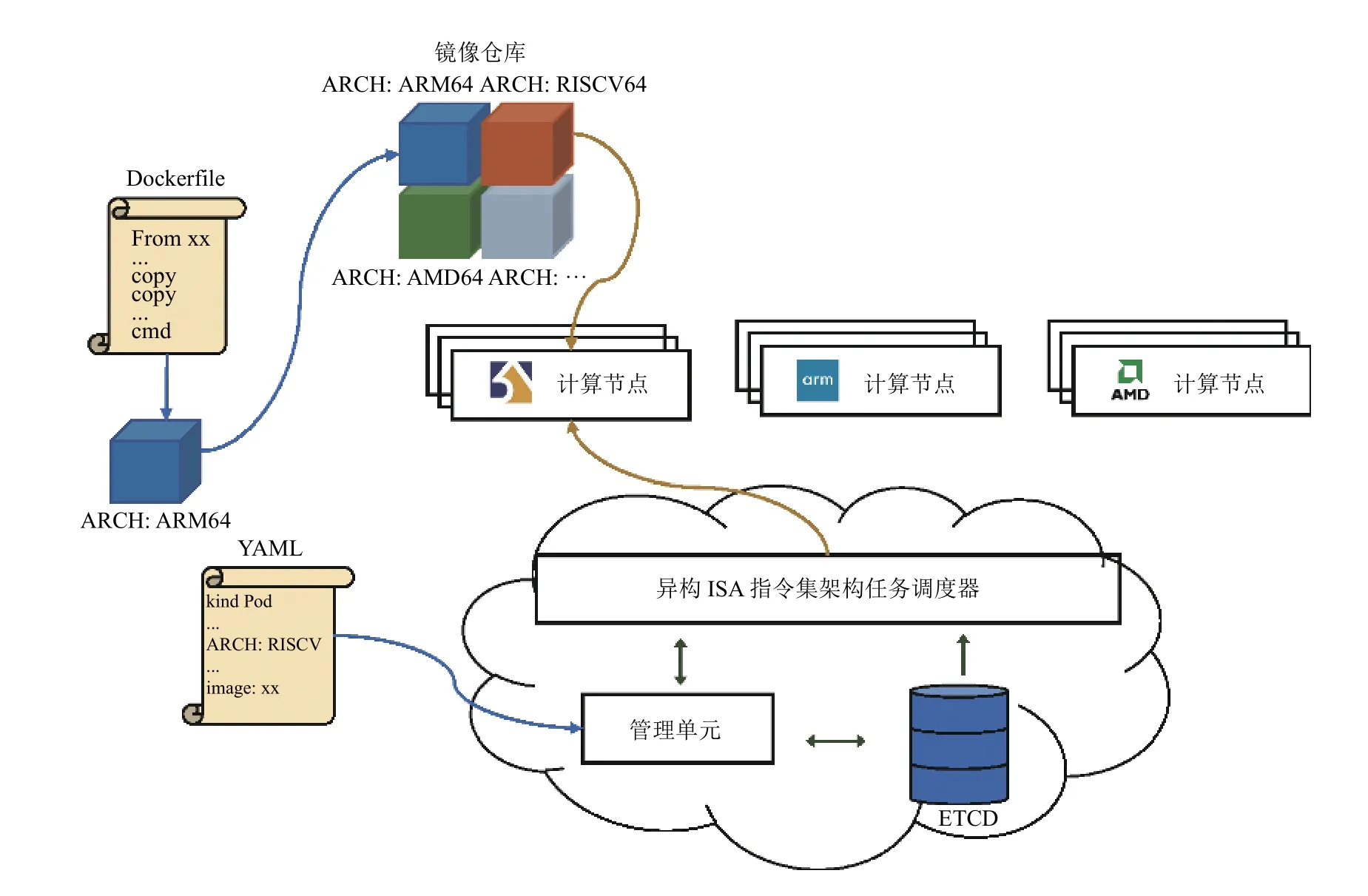
图1 基于Kubernetes异构ISA指令集架构调度
图2统计了在3种异构ISA指令集架构(RISC-V、ARM、X86)环境下部署100个RISC-V任务时的调度正确频率, 实验平台见表1所示, 在调度RISC-V基础指令集任务时, 由于3个RISC-V节点都可以对其进行正常部署, 调度正确率为62%; 而在调度没有添加任何ISA相关标签的RISC-V扩展指令集任务时, 任务不仅需要RISC-V指令集架构环境, 还需要RISC-V节点具有特定扩展指令集架构, 调度正确率只有41%;即使添加了“RISC-V”的ISA标签, 由于特定扩展指令集架构的影响, 调度正确率也只有67%.
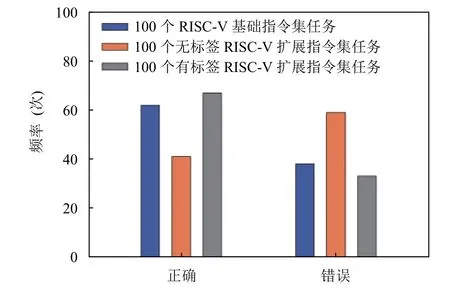
图2 RISC-V任务在默认调度器下的调度正确率
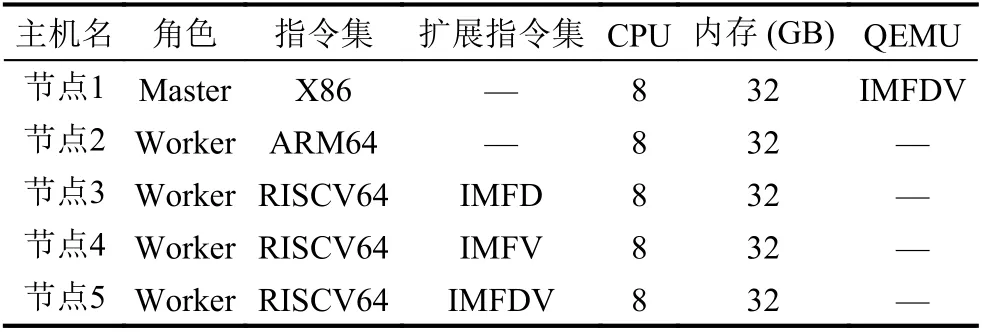
表1 实验集群设备参数
因此, 面对异构ISA指令集架构的云平台, 当同时部署ARM、X86、RISC-V架构节点, 现有Kubernetes调度方案都无法正常调度. 尤其是面对具有多种RISC-V扩展指令集, 当前的Kubernetes云服务调度平台需要满足如下的3点需求:
需求① (指令可编译性): 在现有场景下, 支持对应扩展的计算任务的交叉编译模式.
需求② (执行正确性): 合理分配满足指令集架构的节点.
需求③ (架构兼容性): 适配多种指令集, 满足指令集在云平台节点上的架构兼容性.
为了解决创建时多种架构节点的分配问题, 本文设计了指令集感知与匹配(ISAMatch)模型来对节点ISA指令集进行匹配. 依次通过架构过滤、指令集过滤和节点打分找出最佳匹配节点.
3 基于Kubernetes的ISA架构匹配策略的设计与实现
ISAMatch模型是一种针对异构ISA指令集架构节点环境下的集群调度方案. 如图3左侧所示, controller-manager作为集群内部的管理中心, 负责管理集群的节点、作业和资源等信息, 并整合用户申请的YAML信息交由调度器进行调度; scheduler 获取待调度Pod信息后由ISAMatch模型读取Pod和候选Node节点列表的ISA指令集架构数据, 并选择合适的Node节点进行绑定, 根据绑定信息将Pod交由对应节点kubelet,从镜像库中拉取与宿主机架构匹配的镜像.
图3右侧是ISAMatch模型的整体工作流程,ISAMatch模型可以分为两个阶段, 两个阶段以是否需要交叉编译作为分隔.
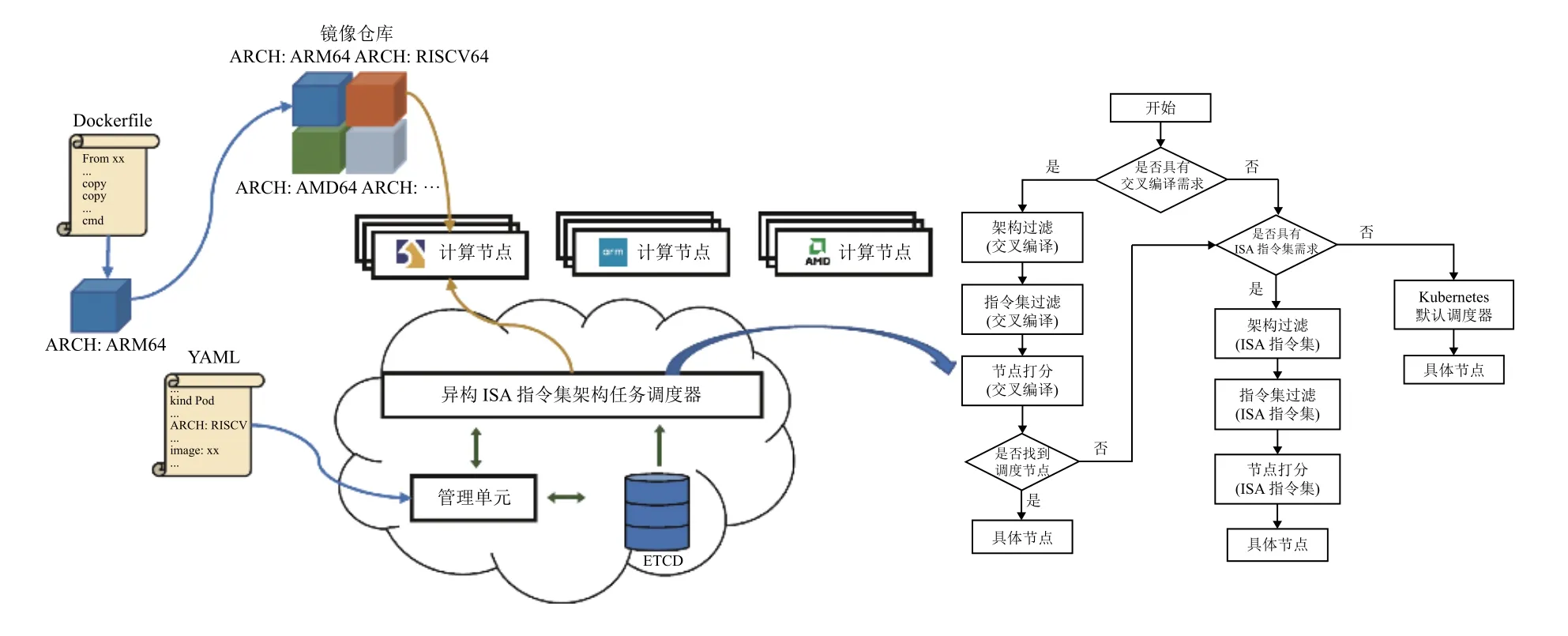
图3 基于Kubernetes的ISA架构匹配策略架构和流程图
第1步(交叉编译), 判断当前任务是否具有交叉编译需求.
第2步(ISA指令集), 判断当前任务是否有具体ISA指令集架构需求.
第3步(架构过滤), 粗粒度的过滤不匹配的顶层指令集架构节点.
第4步(指令集过滤), 细粒度的过滤RISC-V特有的扩展指令集架构.
第5步(节点打分), 综合指令集亲和性、同种指令集架构节点数量、资源利用率对节点打分, 选取得分最高的节点作为候选绑定节点.
任务进入集群后首先判断其是否具有交叉编译需求, 如果有则直接跳过第2步, 根据其交叉编译所需要的ISA指令集依次执行架构过滤、指令集过滤和节点打分操作. 当任务不具有交叉编译需求或通过交叉编译判断未能找到合适的调度节点, 则继续执行第2步判断其是否有具体ISA指令集需求, 如果有, 则ISAMatch会根据任务所需ISA指令集依次执行架构过滤、指令集过滤和节点打分操作, 最终选出合适Node节点. 如果同时不具备交叉编译和ISA指令集需求时, 任务将交由Kubernetes默认调度器进行调度.
综合上述流程, 本小节将对交叉编译和ISAMatch模型进行详细描述.
3.1 交叉编译
截至目前, RISC-V扩展指令集中有12个指令集已获批, 12个指令集处于草案状态, 另有5个指令集已冻结. 因此, 应对多种还未完成的扩展指令集, 市场上尚未有对应指令集扩展的芯片, 应对复杂指令集需求的Pod请求, 云端集群也不可能完备地集成具有所有指令集模块组合芯片的节点.
为了解决需求① (指令可编译性), 本文设计了采用交叉编译的模式来解决复杂指令集请求, 以满足上述复杂指令集动态组合的条件. 本系统主要分两种编译模式: 1) 混合编译模式QEMU; 2) 节点指令集架构属性的同构编译ARCH, 如图4所示, 节点ARCH标签代表节点具有的指令集架构属性; 任务ARCH标签代表任务所请求的指令集架构属性; 节点QEMU代表节点具有的交叉编译指令集架构属性; 任务QEMU标签代表任务所请求的指令集架构属性. 本系统通过对用于匹配交叉编译模式下的架构属性进行标记, 标记为混合编译模式QEMU (以图4为例, 节点具有RV64IMFDV的交叉编译属性, 即具有该指令集架构需求的任务可以在该节点上交叉编译运行). 如图3右侧流程图, 在架构过滤阶段判断Pod是否具有QEMU标签请求. 当一个具有QEMU标签请求的Pod进入调度器时, 调度器会根据节点QEMU标签进行粗粒度架构过滤, 进入指令集过滤阶段后根据QEMU标签的扩展指令集部分进一步细粒度的过滤不匹配架构节点, 最后由节点打分模型分别对指令集亲和性、节点数目、节点资源利用率进行评估选出合适绑定节点. 若QUME标签的ISAMatch模型没有找到候选节点, 即所有候选节点QEMU标签中没有匹配的节点, 那么会进行常规的通过ARCH标签的调度.
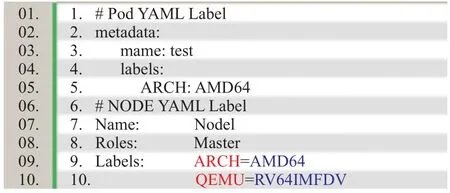
图4 Pod和Node标签设置
3.2 ISAMatch模型
为了解决需求② (执行正确性)和③ (架构兼容性)的云平台任务调度技术挑战, 本文创新地定义了RISC-V指令集亲和性, 用以描述任务请求指令集模块和节点指令集模块匹配程度的量化指标. 与ARM/X86指令集向后兼容不同, RISC-V具有模块化和可扩展的指令集架构, 除了4组基本指令集外, 还具有多个扩展指令集, 这也使得RISC-V架构的处理器设计人员可以根据自身需求选择是否添加这些扩展指令. 以指令集架构RV64IMFDV为例, 其表示该架构支持RV64I的基础指令集与M、F、D、V四种扩展指令集, 那么类似于RV64I、RV64IM、RV64IMFD等12种架构组合需求的Pod都能在该架构的处理器节点上运行. 指令集亲和性值最大的节点即表示Pod指令集架构需求层面匹配最优的Node节点.
定义(指令集亲和性): 用于描述任务请求指令集模块和节点指令集模块的相似程度:
instructionAffinity=Pod模块数/Node模块数
其中, 模块数是除去RV和处理器位数后的字母模块的数目即IMFDV, Pod指令集模块表示Pod请求的指令集架构, Node指令集模块表示Node具有的指令集架构. 当两者数目越接近, 则指令集亲和性越高, 指令集匹配程度越高.
在具有多种混合架构的Kubernetes集群中, 指令集架构匹配是Pod正常运行的硬性指标. 由于Kubernetes的节点选择(nodeSelector)约束和亲和性约束都属于完全约束, 且不支持模糊匹配, 所以本文设计的ISAMatch模型采用Kubernetes的标签属性, 旨在识别具有共同特征或属性的资源对象. ISAMatch模型具有两类标签属性: ARCH标签和QEMU标签. 当Pod进入调度器时, 如图3右侧流程图所示ISAMatch模型会首先判断待调度Pod是否具有QEMU即是否具有交叉编译需求, 如若没有QEMU标签则继续判断是否具有ARCH标签即是否具有特定指令集架构需求, 如若没有QEMU标签和ARCH标签则转入Kubernetes默认调度器进行调度. QEMU标签过滤和ARCH标签过滤的实现过程相似, 均采用架构过滤、指令集过滤和节点打分依次执行.
对所有候选Node节点执行架构过滤, 粗粒度的选出同族ISA指令集架构节点, 而对于具有特有扩展指令集架构的RISC-V节点, 还需要执行指令集过滤, 对同族ISA指令集架构节点进一步对扩展指令集的模块名称进行过滤, 必须具备Pod请求模块是Node支持模块子集的特点:
instructionPod⊆instructionNode
选出的候选节点为细粒度的同族ISA指令集节点. 候选节点进一步进行节点打分. 节点打分会选出具体绑定的节点, 打分机制将综合考虑指令集亲和性、同种指令集架构节点的数量和节点资源利用率. 其优先级为:
指令集亲和性>同种指令集架构节点数量
>节点资源利用率
具体示例如图5所示, 在14个异构ISA指令集架构节点的集群中任务申请为RV64IMF. 架构过滤会根据任务YAML文件中的ARCH标签字段过滤粗粒度指令集架构为9个RISC-V节点. 指令集过滤根据细粒度的扩展指令集架构进一步过滤节点为7个支持IMF模块的RISC-V节点. 节点打分策略依据优先级顺序首先计算候选节点的指令集亲和性, 亲和性结果会选出一组或多组指令集亲和性相等的指令集架构节点. 由于指令集亲和性存在一定几率选出多组指令集亲和性相等的节点族, 因此, 本文设计了统计满足条件的同种指令集架构节点数量作为打分标准, 选择拥有节点数量更多的指令集架构节点将会为集群剩下更多的其余指令集架构节点, 以方便之后对于其余指令集架构需求任务的调度. 当具体选定了某一细粒度扩展指令集架构时, 从候选节点中选择资源利用率最小的节点进行绑定, 以提高在满足调度申请条件的前提下的资源负载均衡程度和任务计算效率.
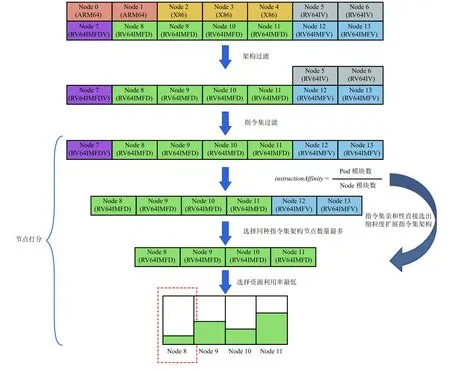
图5 ISAMatch模型工作流程图
4 实现与优化
本文通过基于Volcano调度器实现了支持多种ISA指令集架构任务的调度需求. 在不破坏Volcano源代码结构的前提下, 以插件的形式设计并实现ISAMatch模型.
4.1 标签自动机
由于ISAMatch模型依赖于Pod和Node的ARCH标签和QEMU标签, 其中Pod所具有的标签是由用户在提交YAML文件时主动设置, 代表用户提交任务所需要的指令集架构, 而集群中节点所支持的标签需要集群管理员手动添加, 需要在集群部署完成后为所有节点添加节点支持的ISA指令集架构和节点支持的ISA指令集交叉编译架构. 在规模较大的Kubernetes集群场景下, 这种由集群管理员手动添加标签的方式非常麻烦, 因此, 本文设计实现了自动标签设置脚本.
自动标签设置脚本运行在集群Master节点上, 通过kubectl命令工具从ETCD中获取所有节点信息, 并由正则表达式过滤出节点IP. 同时, 在将节点部署进集群后, 节点会自动生成kubernetes.io/arch标签用于识别节点指令集架构, 脚本从节点详细信息中读取节点IP和粗粒度节点指令集架构. 而对于RISC-V指令集架构节点, 标签显示为kubernetes.io/arch=riscv64, 因而无法细粒度的识别RISC-V的具体扩展指令集架构, 因此需要从节点gcc-v中的--with-arch标签获取更详细的ISA信息(如图6).

图6 gcc中的ISA信息
最后脚本模拟手动通过kubectl命令“kubectl label node $node ARCH=$ISA”添加ARCH标签方式.
交叉编译环境被默认安装在/opt/RISCV/bin/路径下, 同样的, 由/opt/RISCV/bin/riscv64-unknown-linuxgnu-gcc-v获取详细扩展指令集架构, 最后通过kubectl命令工具由脚本模拟添加QEMU标签.
4.2 架构和指令集过滤以及节点打分流程优化
架构过滤和指令集过滤伪代码如算法1所示.
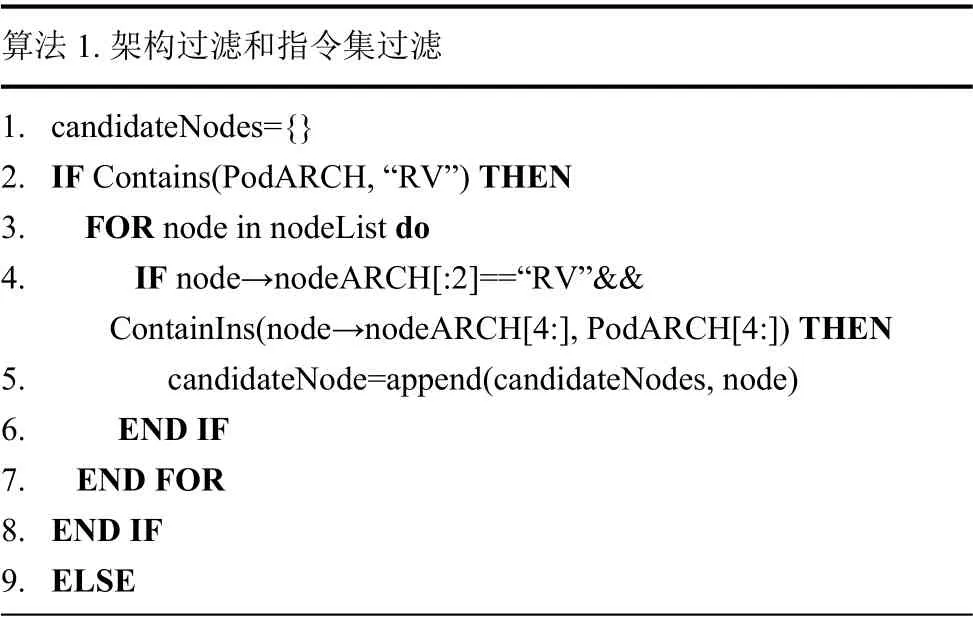
算法 1. 架构过滤和指令集过滤1. candidateNodes={}2. IF Contains(PodARCH, “RV”) THEN 3. FOR node in nodeList do 4. IF node→nodeARCH[:2]==“RV”&&ContainIns(node→nodeARCH[4:], PodARCH[4:]) THEN 5. candidateNode=append(candidateNodes, node)6. END IF 7. END FOR 8. END IF 9. ELSE
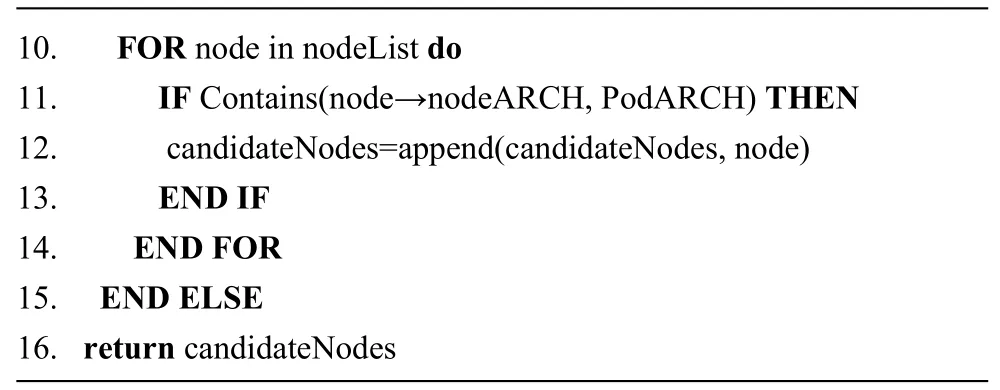
10. FOR node in nodeList do 11. IF Contains(node→nodeARCH, PodARCH) THEN 12. candidateNodes=append(candidateNodes, node)13. END IF 14. END FOR 15. END ELSE 16. return candidateNodes
架构过滤是对系统指令集架构进行的粗粒度过滤,是对Pod和Node节点设置的ARCH标签或QEMU标签进行的模糊匹配, 过滤不符合Pod任务申请的架构的Node节点.
指令集过滤是针对RISC-V特有的扩展指令集的细粒度过滤, 由于扩展指令集兼容性的情况, 通过containIns函数判断Pod任务申请的指令集架构是否为Node支持的指令集架构的子集.
如图7, 打分机制综合考虑指令集亲和性、同种指令集架构节点数量和节点资源利用率. 分别计算各个节点与请求Pod之间的指令集亲和性、同种ISA指令集架构数量和各个节点资源利用率, 并组合形成NodeISAInfo结构体. 针对NodeISAInfo依次对指令集亲和性、同种指令集架构节点数量和节点资源利用率进行排序,依据优先级公式选择指令集亲和性最大的一组或多组ISA指令集架构节点, 在多组ISA指令集架构节点中比较同种指令集架构节点数量, 选择多者, 最后在单组中选取资源利用率最低的节点作为候选的绑定节点.
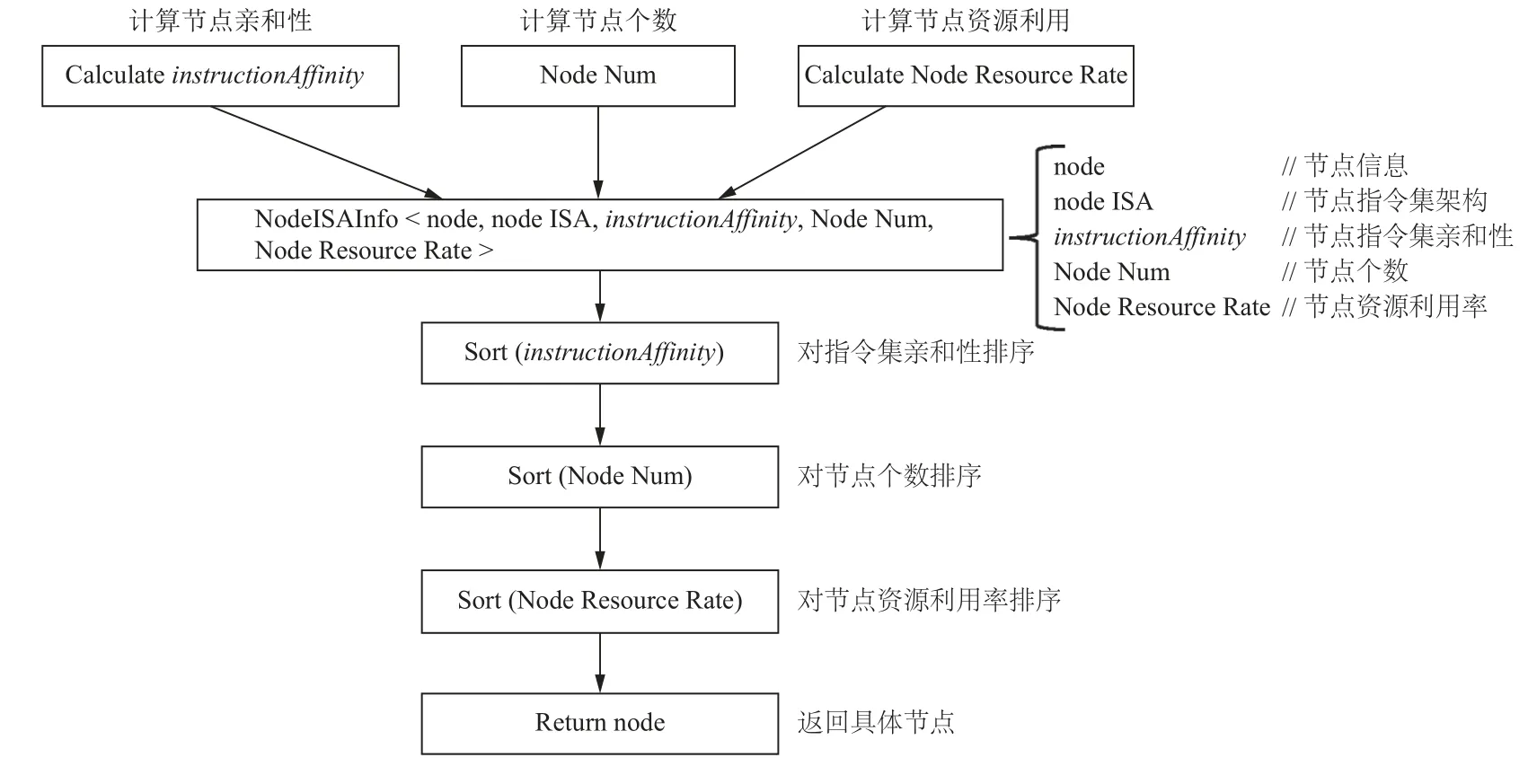
图7 打分机制函数流图
5 评估实验和结果分析
本文以Linux平台最为常见的3种架构作为研究对象(ARM、X86、RISC-V)进行分析, 主要进行:
(1) 评估在异构RISC-V指令集架构的集群环境下, 部署不同架构(含X86、ARM和RISC-V指令集架构芯片)需求任务的调度正确性;
(2) 统计在调度中与传统调度器相比的性能延迟.
5.1 实验平台及数据
实验平台: 在5台部署有Kubernetes集群的虚拟环境上进行验证实验. 其中包括一台X86的虚拟主机、一台ARM64的虚拟主机和3台RISC-V的虚拟主机. 具体参数见表1.
实验数据: 实验数据由随机函数生成了90个服务型任务和10个计算型任务, 100个任务所申请的CPU和Memory资源如图8所示.
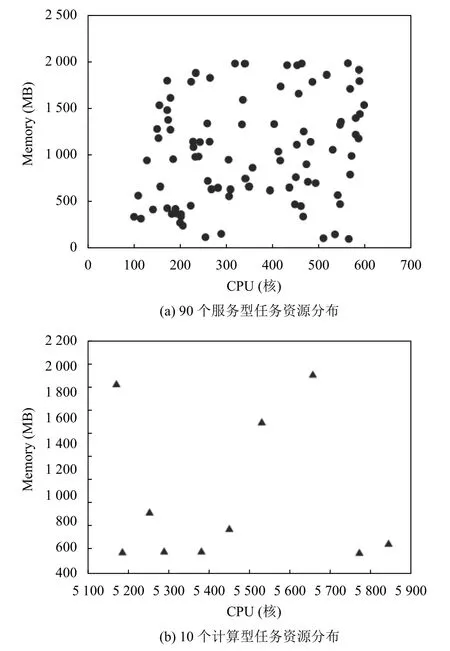
图8 100个任务的资源分布情况
5.2 ISAMatch模型正确性测试
本文通过部署100个RISC-V任务对集群进行ISA架构匹配的测试. 分别测试验证: 1)部署100个RISC-V基础指令集任务, 即只需要在RISC-V节点上就能正常运行; 2)部署100个未带有指令集架构相关标签的RISC-V扩展指令集任务; 3)部署100个带有“RISC-V”标签的RISC-V扩展指令集任务.
实验表明(如图9), RISC-V基础指令集任务只需要部署到RISC-V节点上就能正常运行, 调度正确率为62%; 而未带有指令集架构相关标签的RISC-V扩展指令集任务需要精确到具体的扩展指令, 如RV64IMFD只能运行在节点3和节点5上, 调度正确率为41%; 带有“RISC-V”标签的RISC-V扩展指令集任务虽然排除了ARM和X86两种架构, 但部分调度未能精确找到匹配的扩展指令架构的节点, 调度正确率为67%. 而在ISAMatch模型下, 调度正确率达到100%,ISAMatch模型可以准确的将Pod调度到合适的节点,并能够更细粒度的通过指令集亲和性找到最佳匹配节点, 如图10所示, RV64IMFD可以成功运行在节点3和节点5上, 而根据指令集亲和性, ISAMatch模型会选取更为匹配的节点3作为最佳匹配节点, 而只有当节点3无法满足调度需求时才会选用节点5进行调度.
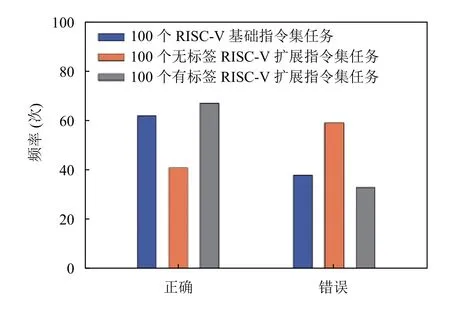
图9 RISC-V任务在默认调度器下的调度正确率
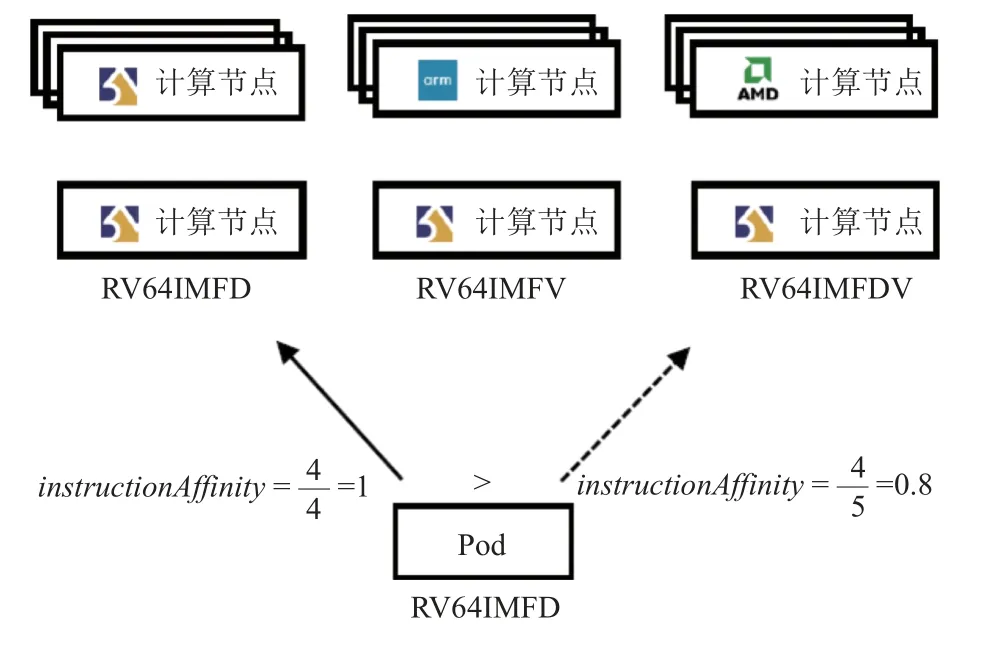
图10 指令集亲和性下RISC-V扩展指令集任务调度选择
5.3 调度延迟分析
进一步, 为了验证具有ISAMatch模型调度器和传统调度器的调度延迟, 实验测试了调度1-100个Pod.其中, 调度单个Pod所需的调度延迟是统计待调度Pod在Volcano调度器中从调度起始函数OpenSession开始到绑定具体节点后的CloseSession结束所用的时间. 从图11可以得出当部署40个以内的Pod数时, 传统调度器和具有ISAMatch模型的调度器调度所用延迟在误差范围内接近, 大约在1 ms左右. 而当部署40个以上Pod时, 具有ISAMatch模型的调度器所消耗的调度延迟略大于传统调度器, 并随着Pod数量的增加, 两者之间的差值也逐步增大, 在部署100个Pod时, 具有ISAMatch模型的调度器比传统调度器多耗时约6 ms.这是由于随着Pod数目的增加, 每一轮Session对单个Pod进行调度时都需要额外对其ISA指令集架构进行匹配, 经测量, 对单个Pod进行ISA指令集架构匹配的平均耗时为60.57 μs. 部署100个Pod有无ISAMatch模型耗时的差值与Pod个数不构成线性关系(如图12),且与平均耗时不成倍数关系, 其原因是随着Pod数目增大后无法在同一个Session中完成调度, 需要开启多个Session进行调度, 因此会有额外的调度损耗.
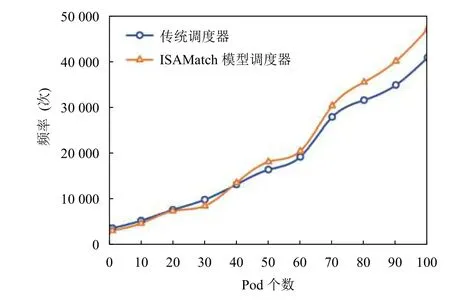
图11 ISAMatch模型调度延迟
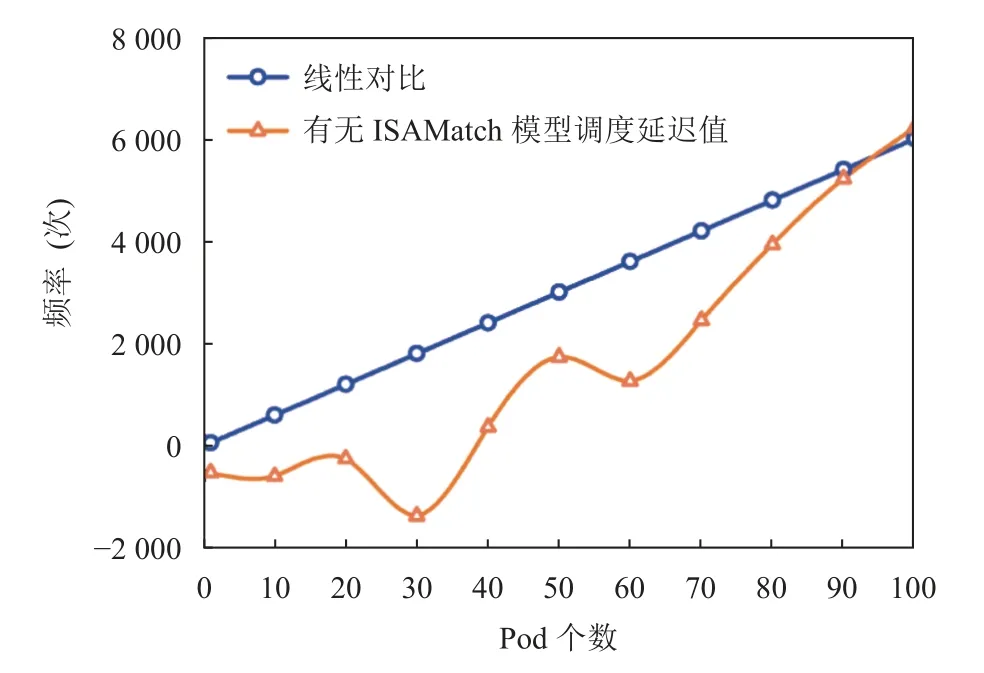
图12 有无ISAMatch模型延迟差与单任务延迟线性对比
6 结语
针对目前Kubernetes集群无法支持异构ISA指令集架构任务调度的问题, 提出了一种具有ISA指令集感知能力的异构资源调度方案. 应对多种RISC-V扩展指令集架构需求任务, 提出了指令集亲和性标准, 并在此基础上通过架构过滤、指令集过滤和节点打分3个维度的综合评价, 在保证调度性能的前提下, 提高集群调度正确性和资源利用率, 使集群有能力应对更多复杂场景.
猜你喜欢
农业工程学报(2022年11期)2022-08-22
计算技术与自动化(2022年2期)2022-07-04
南方农业·下旬(2022年4期)2022-05-24
小学教学研究(2022年5期)2022-04-28
电子乐园·上旬刊(2022年5期)2022-04-09
科学与财富(2021年35期)2021-05-10
福建基础教育研究(2019年12期)2019-05-28
福建基础教育研究(2019年11期)2019-05-28
知识就是力量(2017年2期)2017-01-21