
基于有限元法的浅海移动平台机械结构分析
2022-09-19 02:13:42吴中正方之遥董奇峰纪晓宇
起重运输机械 2022年16期
吴中正 方之遥 董奇峰 纪晓宇
1中交第二航务工程局有限公司 武汉 430040 2长大桥梁建设施工技术交通行业重点实验室 武汉 430040 3交通运输行业交通基础设施智能制造技术研发中心 武汉 30040 4中交公路长大桥建设国家工程研究中心有限公司 武汉 430040
0 引言
随着国家综合实力的不断增强,国家对海洋领域的资源开发和领土权益保护愈发重视,将海洋工程装备作为重点研究领域之一,纳入我国战略性新兴产业高端装备制造业的重要组成部分[1]。浅海移动平台集自行走、自动调平功能于一体,是一款应用于浅海领域的海上施工现代化工程装备。
如图1所示,浅海移动平台主要由履带轮组、悬挂支腿、机架以及液压站组成。其中,履带轮组中的履带能增大轮组与地面的接触面积,使浅海移动平台可以在松软地面和沙滩上行走,提高了施工平台对复杂地形的适应性;悬挂支腿结构如图2所示,主要由内套筒、固定导向套、移动导向套、外套筒和内置悬挂液压缸组成,外套筒与固定导向套固连,内套筒与移动导向套固连,当悬挂液压缸运动时,可驱动内套筒相对外套筒移动。由于外套筒与机架固连,内套筒与履带轮组铰接,所以当内置悬挂液压缸驱动悬挂支腿内、外套筒相对运动时,可实现浅海移动平台的调平,从而提高了施工平台在移动行走和静止作业时的稳定性;机架主要由与悬挂支腿固连的机械结构件组成,主要功能为稳定平台结构、搭载施工作业。悬挂支腿和机架构成了浅海移动平台的主体框架机械结构。主体框架机械结构是浅海移动平台的主体承重构件,其结构强度和动态特性对浅海移动平台的施工作业稳定性、安全性至关重要,故对主体框架关键部件机械结构进行分析的环节必不可少。

图1 浅海移动平台结构图
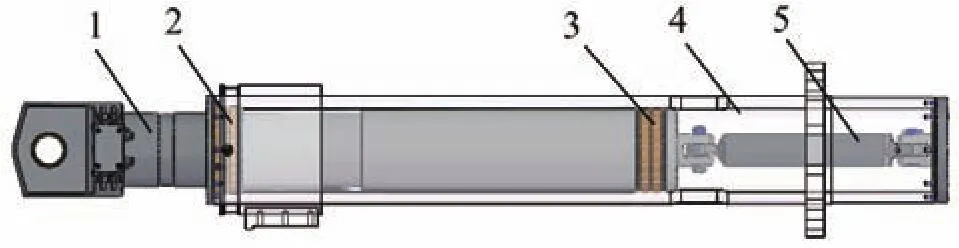
图2 悬挂支腿结构图
有限元法是机械结构设计和性能分析常用的技术手段之一,能对机械结构的静态和动态特性进行有效的分析,为常规结构设计和可靠性校核提供参考[2]。其中,静态分析主要指静力学分析,主要分析机械结构的强度和刚度;动态分析往往指模态分析,主要分析机械结构的固有振动特性。本文采用有限元法对浅海移动平台的主体框架机械结构进行静力学分析和模态分析,为海洋施工平台的设计和研究提供理论依据。
1 主体结构实体模型建立
虚拟样机技术能根据设计所需模拟真实的物理环境,为复杂机械结构的设计、优化和仿真模拟提供良好的操作平台,使设计人员能够从外观、结构特性等多方面对机械结构进行分析和验证,因此,广泛应用于工程机械、农业机械、航空航天等多个工程领域,是现代结构设计不可或缺的关键技术之一[3]。采用有限元法对机械结构进行分析时,计算模型的准确性十分重要。浅海移动平台主体机械结构较为复杂,故采用虚拟样机技术对其进行建模和仿真计算研究。
对浅海移动平台主体结构建模时,根据等效刚度代换理论,将具体分析模型结构进行有效的简化处理。对浅海移动平台主体机械结构进行如下简化处理:1)简化各部件配合和连接形式 将机架各杆件之间、机架与悬挂支腿之间、悬挂支腿各零部件之间的螺栓连接简化为面接触。2)简化非关键位置的细部特征 忽略不影响整体受力特性、不处于核心受力位置的倒角、圆角和螺纹孔,忽略机架结构上的围栏、爬梯、液压站等轻型辅助结构件并进行等效质量分布。
通过上述简化处理,在SolidWorks中建立了浅海移动平台在悬挂支腿处于最大行程位置工况下的主体机械结构实体模型,整体结构尺寸为:3 m×3 m×2.3 m,如图3所示。在建模过程中,根据实际设计需要对各零部件赋予对应的材料属性。其中,机架各杆件、板件和悬挂支腿内套筒、外套筒赋予材料Q235,弹性模量E=210 GPa,泊松比ε=0.274,密度ρ=7 850 kg/m3;移动导向套和固定导向套赋予材料锡磷青铜,弹性模量E=110 GPa,泊松比ε=0.341,密度ρ=8 780 kg/m3。

图3 主体结构实体模型
2 核心部件机械结构静力学分析
悬挂支腿下端铰接履带轮组,上端与杆件构成整个浅海移动平台的主体框架,在整个平台结构中起到承上启下、稳定机身主体的作用,是浅海移动平台的关键零部件,也是核心的受力部件,故需要对悬挂支腿进行机械结构静力学分析。
2.1 受力分析
当浅海移动平台在以最快速度运动时突然制动,此时悬挂支腿处于极限受力状态,不计悬挂支腿自身质量,对此时悬挂支腿的受力情况进行受力分析,受力简图如图4所示。其中,Fx、Fy为履带轮组作用在与悬挂支腿铰接位置处的反力,F为浅海移动平台整机重心在突然制动时分布在该悬挂支腿上的惯性力总和,F1、F2为F通过机架分布在悬挂支腿上的作用力,FG为整机分布作用在该支腿上的重力,L1、L2和L分别为F1、F2和F相对于铰接点位置处的距离,M为履带轮组作用在与悬挂支腿铰接位置处的反力矩。
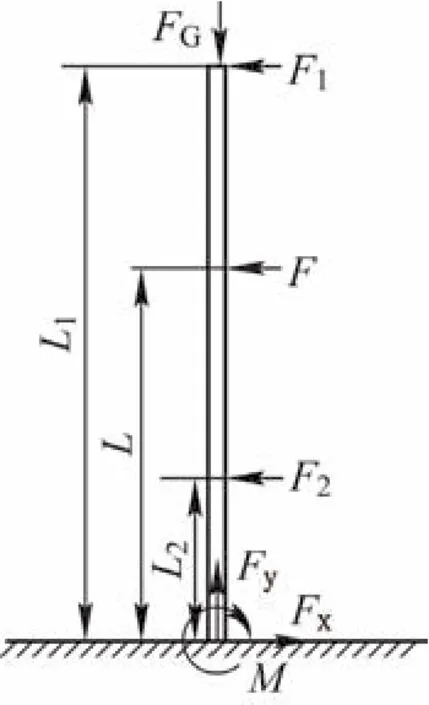
图4 单悬挂支腿受力简图
将各分力进行联立,有

式中:F=51 430 N,FG=43 740 N,L1=2 300 mm,L2=655 mm,L=1 491 mm。
经计算可得:Fx=51 430 N,Fy=43 740 N,F1=26 130 N,F2=25 300 N,M=76 682 N·m。其中,F1、F2、FG为对悬挂支腿整体结构进行有限元静力学分析时的添加载荷。
2.2 悬挂支腿静态特性分析
静态特性分析是指结构在一定约束条件中,添加静力载荷作用下的响应特性,也称静力学分析。本文使用SolidWorksSimulation模块进行悬挂支腿的机械结构静力学分析。
对悬挂支腿整体结构进行约束和载荷的添加,如图5所示。首先,根据悬挂支腿实际约束情况,将其与履带轮组相接触的位置施加固定几何体约束;其次,根据上一节的受力分析结果,在悬挂支腿上部分相应位置添加与F1、FG对应方向和大小的载荷,在下部分相应位置添加与F2对应方向和大小的载荷;然后,对悬挂支腿实体模型进行自动网格划分,划分结果为35 987个节点、19 884个单元,最大网格尺寸不大于40 mm;最后,对悬挂支腿有限元模型进行解算。
悬挂支腿机械结构静力学分析结果如图5、图6所示。由图5可以看出,悬挂支腿在极限工况下应力集中发生在靠近履带轮组位置处的内套筒上,最大应力为115 MPa。根据第四强度理论,悬挂支腿材料选用Q235,安全系数取2[5],许用应力为117.5 MPa,在设计强度范围以内,悬挂支腿强度合格。
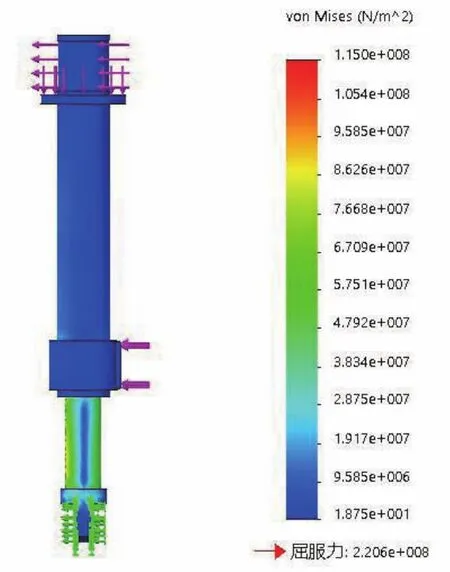
图5 悬挂支腿应力分布
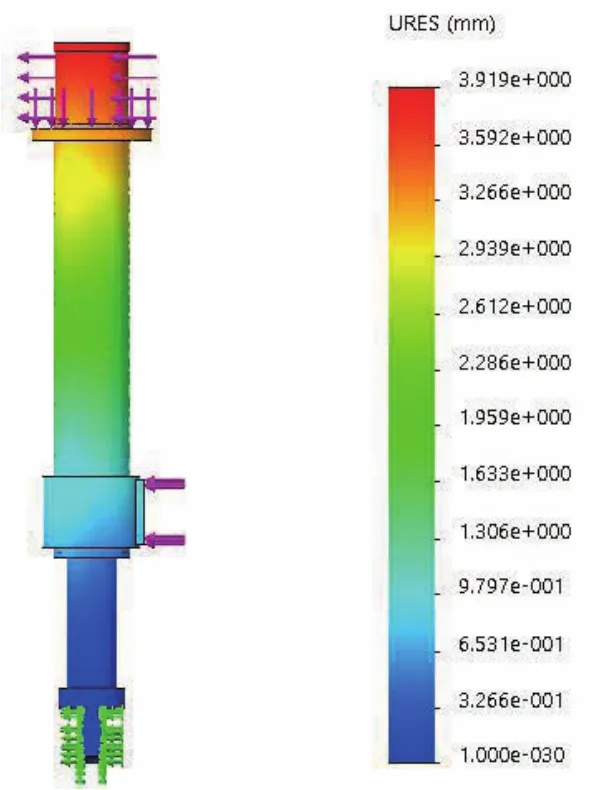
图6 悬挂支腿形变位移分布
由图6可以看出,悬挂支腿在极限工况下最大位移发生在支腿结构最上端,为3.9 mm,小于悬挂支腿长度的1/500(4.6 mm),在设计变形范围以内,悬挂支腿刚度合格。
3 主体结构模态分析
液压站位于浅海移动平台的作业平台上,由于液压站的原动机在工作时会产生振动,为避免该振动引起整个机身的共振,在进行机械结构设计和液压站原动机选型时应协同考虑。故有必要对浅海移动平台主体机械结构进行模态分析。
3.1 模态分析基本理论
模态反映了结构在按某一阶固有频率振动时,结构上各点偏离其平衡位置所遵循的比例关系。模态分析主要用来获取研究对象的模态参数,如频率、振型等,是对机械结构动态特性的研究方法之一[6]。通常,模态分析不需要考虑外部载荷等因素,仅考虑结构的质量矩阵和刚度矩阵即可[7],其方程为

式中:[M]为质量矩阵,{x''}为加速度矩阵,[K]为刚度矩阵,{x}为位移矩阵。假设该系统为线性系统,则x(t)可转化为

式中:{φ}i为第i阶固有频率振型函数,ωi为第i阶固有圆频率。将式(3)代入式(2)中可得

由于{φ}≠{0},故

求解式(5)即可得系统第i阶固有频率振型函数{φ}i和固有圆频率ωi。通常,在有限元分析软件中得到的频率结果为自然频率,自然频率与圆频率转换关系为

式中:fi为自然频率,ωi为圆频率。
3.2 模态分析
本文使用Ansys Workbench对悬挂支腿进行有限元模态分析,将SolidWorks中浅海移动平台主体机械结构实体模型导入到Ansys Workbench软件的中Modal模块。
首先对浅海移动平台主体机械结构进行自动网格划分,共212 410个节点和73 639个单元;然后在4个悬挂支腿上添加与静力学分析时相同的约束,由于载荷和位姿基本不会影响物体结构的固有频率和振型[8],故不添加任何载荷;最后进行解算。在工程上一般取结构的前六阶频率即可,对浅海移动平台主体机械结构进行前六阶模态分析结果如图7,振型图分析结果如表1所示。

表1 模态分析表(振型以图7中坐标轴为参考)
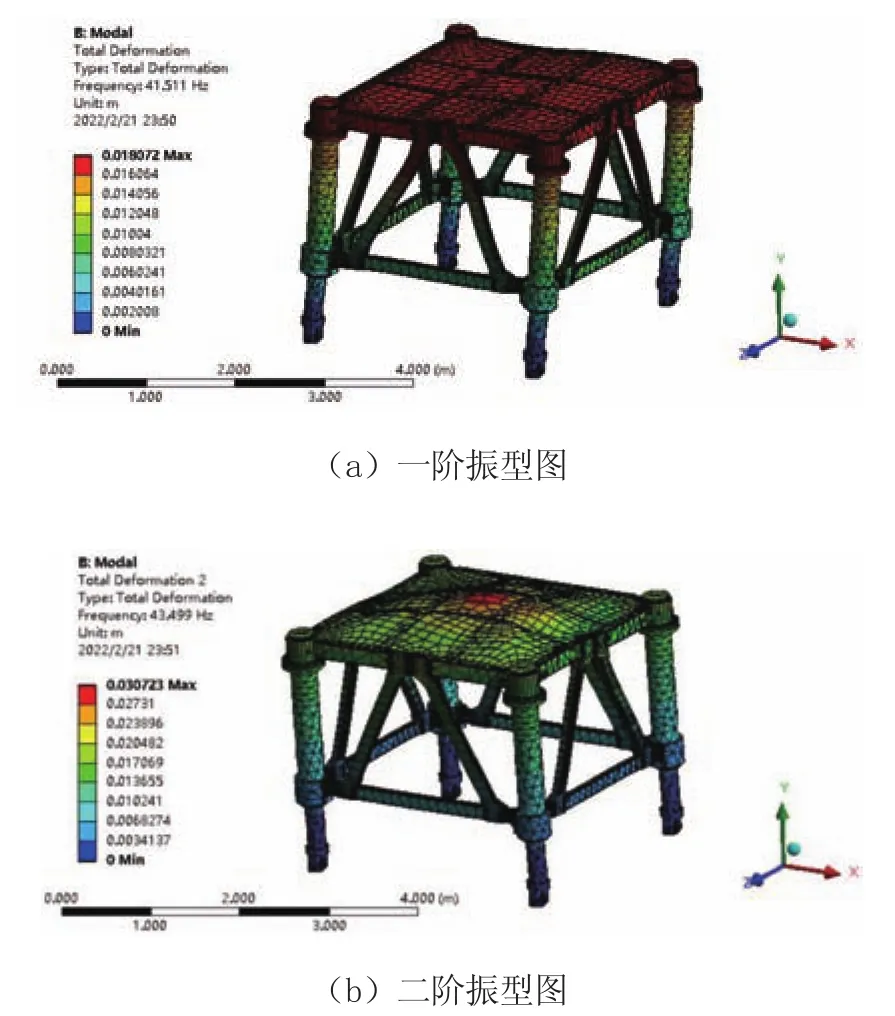
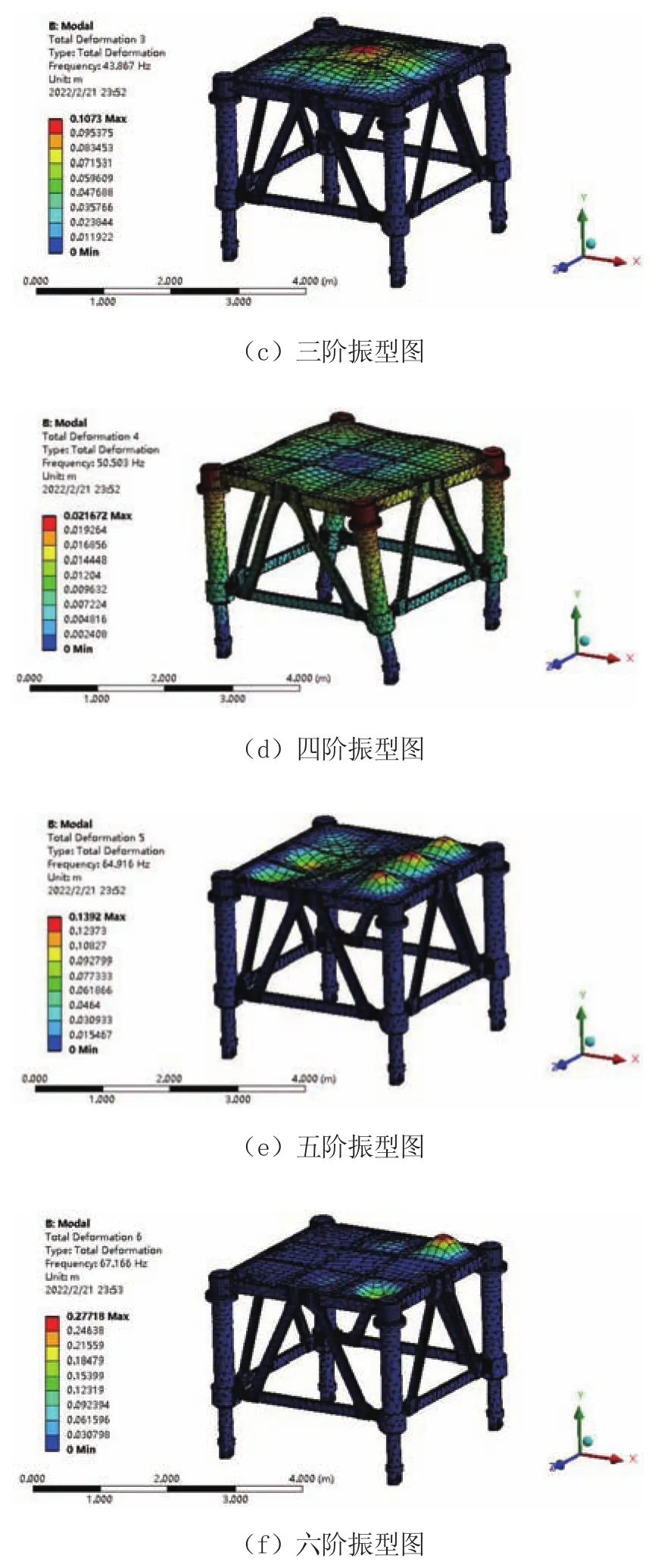
图7 浅海移动平台主体结构前六阶振型图
由模态分析结果可知,浅海移动平台主体结构固有频率不高,前六阶固有频率较为集中在41.511~67.166 Hz。由振动理论可知,为避免与平台主体结构发生共振,液压站原动机振动频率与平台固有频率的比值应小于0.75或大于1.414[9],即小于31.133 Hz或大于94.987 Hz。由振型分析结果可知,浅海移动平台主体机械结构中的作业平板结构沿不同方向出现扭动和摆动的现象,故需要在平板与杆件型材之间添加筋板结构以提高二者之间的连接刚度。
4 结论
本文以浅海移动平台主体机械结构为研究对象,采用虚拟样机技术在SolidWorks中建立了施工平台主体结构的三维实体模型。结合悬挂支腿受力特性分析,在SolidWorks/Simulation环境中对悬挂支腿进行机械结构静力学分析,得到了悬挂支腿在极限工况下的应力分布和形变分布,经分析悬挂支腿结构符合设计要求。结合实际需求,在Ansys Workbench环境中对浅海移动平台主体机械结构进行模态分析,得到了平台主体结构的前六阶振动频率和振型,为液压油原动机的选型和局部结构的加强方案提供了参考依据。
猜你喜欢
结构工程师(2022年2期)2022-07-15 02:25:22
中国公路(2021年17期)2021-11-22 03:10:50
小天使·三年级语数英综合(2020年4期)2020-12-23 04:48:40
中国科技纵横(2020年5期)2020-06-29 08:01:48
Journal of Integrative Agriculture(2019年2期)2019-02-14 03:12:26
制造技术与机床(2017年10期)2017-11-28 05:23:55
凿岩机械气动工具(2017年3期)2017-11-22 07:21:54
工业设计(2016年6期)2016-04-17 06:42:51
广东海洋大学学报(2015年3期)2015-12-22 10:05:28
有色金属加工(2014年1期)2014-09-19 10:29:06
