
DoS攻击下网络化控制系统基于观测器的记忆型事件触发预测控制
2022-09-17 07:32:08卢韦帆尹秀霞
控制理论与应用 2022年7期
卢韦帆,尹秀霞
(南昌大学理学院数学系,江西南昌 330031)
1 引言
随着计算机网络和无线通信技术的发展,网络化控制系统(networked control systems,NCSs)飞速发展,引领了新的一轮产业的变革.网络的一系列问题(带宽资源的有限、数据丢包等)一同引入到控制系统,大大降低了网络化控制系统的性能[1-2].由此可见,在开放的网络环境下,控制信息的安全性凸显重要.网络化控制系统最为常见的一种网络攻击手段-拒绝服务(denial-of-service,DoS)攻击.DoS攻击是一种资源耗尽型攻击,它的攻击目的主要是让被攻击的主机和服务器拒绝用户的正常访问,占用大量的带宽资源,最终使得服务器资源被耗尽,造成服务器瘫痪.对于网络化控制系统,DoS攻击会阻止远程控制器和执行器接收反馈信号或控制信号.在DoS攻击下,由于缺少反馈测量信号或控制信号,网络化控制系统将变得不稳定[3-5].
在有限的带宽资源下,保证网络化控制系统的物理设备安全、信息传输安全、控制安全,构建一个能够及时应对恶意网络攻击且安全高效的工业网络化控制系统,从而实现DoS攻击下网络化控制系统预测补偿控制已经成为控制相关领域亟待研究的方向.目前,已经有了几种控制设计方案.文献[6]对于功率受限的DoS攻击下线性时变网络化控制系统的稳定性进行了研究.文献[7]提出了一个由DoS攻击频率和DoS攻击持续时间限制的更加通用的DoS攻击模型.基于类似的想法,文献[8]对动态输出反馈控制器的DoS攻击模型进行了扩展.文献[9]讨论了零和博弈框架应用于处理具有通信约束和DoS攻击的线性网络化控制系统的最优控制和调度问题.文献[10]研究了一种DoS攻击下基于状态反馈的弹性控制器的设计方案.文献[11]探讨控制器与DoS攻击补偿方案的合成问题.值得注意的是,除了上述少数研究外,大多数现有的研究成果都没有考虑NCSs的安全问题,仅讨论了控制设计方案.
NCSs除了DoS攻击引起的安全问题外,由于网络带宽资源非常有限,减少对网络带宽资源的频繁使用也是一个亟待解决的问题.通过事件触发控制(eventtriggered control,ETC)来减少网络带宽的消耗已被广泛研究(文献[12]对单一连续时间系统的研究和文献[13-14]对多智能体系统的研究),这使得ETC成为有限的带宽资源问题的一个极具前途的解决方案.
基于上述研究,开发出一种基于观测器的输出反馈控制方案,既能保持系统稳定性,又能主动补偿DoS攻击造成的控制信息丢失,同时大大节省网络带宽资源,更适合现实工业生产中的场景.本文提出了一种新颖的基于观测器的预测控制方案,如图1所示,称为基于观测器的记忆型事件触发预测控制(observer memory-based event-triggered predictive control,OBMETPC).在这个框架下,本文将研究基于观测器的预测控制系统,以主动补偿由于DoS攻击造成的数据丢失.并利用预测控制的基本思想、线性矩阵不等式(linear matrix inequality,LMI)和Lyapunov稳定性理论来解决记忆型事件触发矩阵、观测器增益矩阵和控制器增益矩阵的联合设计问题.这项工作是对预测控制(predictive control,PC)和DoS攻击下的事件触发机制(event-triggered,ET)成果的重大拓展.OB-METPC的优点有以下4个方面.
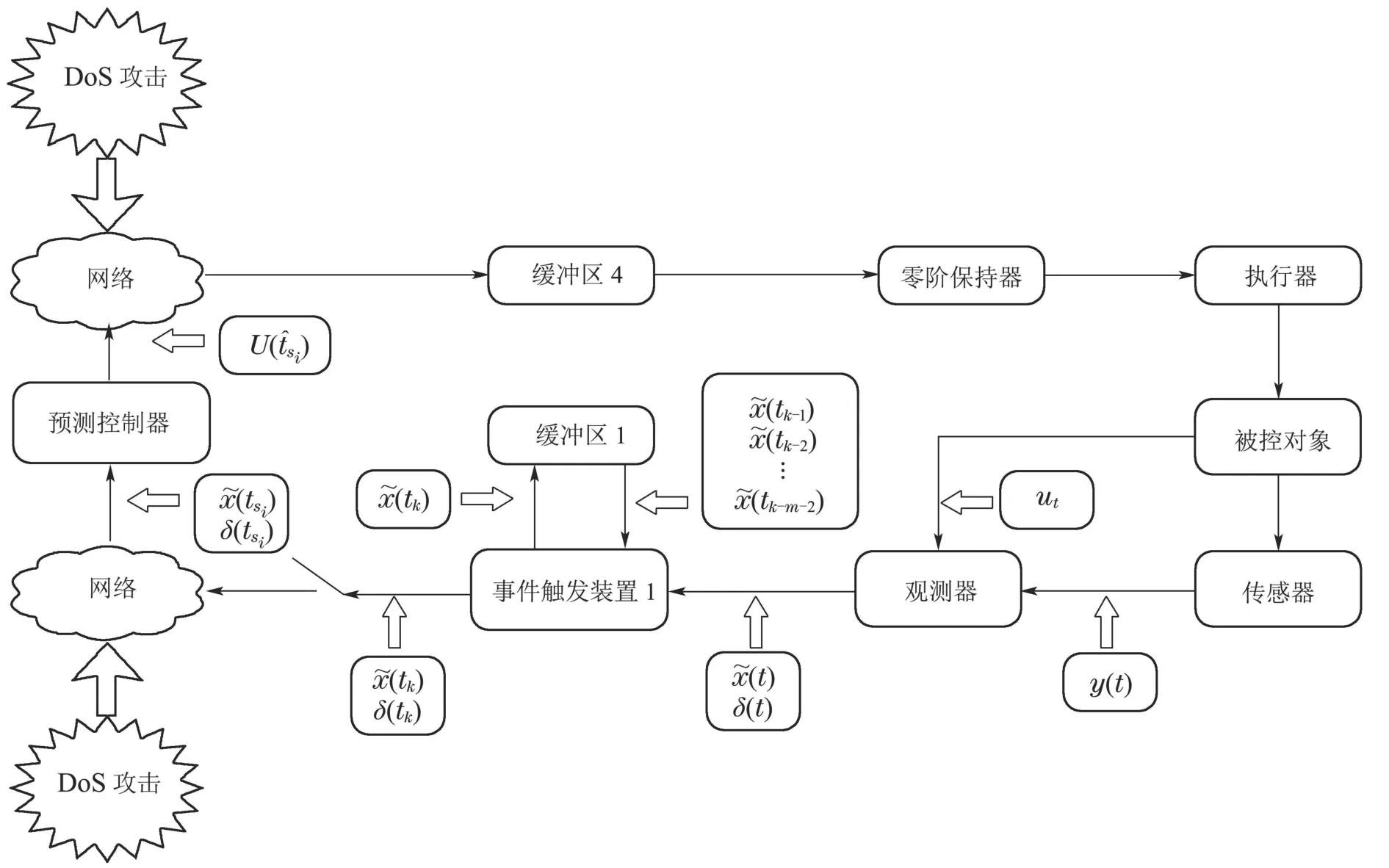
图1 DoS攻击下NCSs的结构框架Fig.1 Framework of NCSs under DoS attacks
1) OB-METPC的通信方案不同于PC[15-16]的通信方案,后者采用了时间触发的通信方案.而本文则基于记忆型事件触发通信方案(memory event-triggered systems,METS)来设计控制器,极大程度上减少了对带宽资源的占用.同时,充分利用历史触发状态信息,使得预测控制的数据包更加合理.
2) 与现有的DoS攻击的预测控制补偿方案[17]相比,本文提出的OB-METPC的另一个优点是结合了PC和ET的优点[11,16,18-19].通过模型和静态观测器的结合,解决无法直接获得被控装置状态信息的问题,还可以主动补偿DoS攻击导致的数据包丢失,极大提高了DoS攻击下NCSs的稳定性.
3) 与最新的DoS攻击补偿方案相比,文献[11]中的方法只考虑了从控制器到执行器的DoS攻击.本文所提出的新颖的OB-METPC解决了传感器到控制器和控制器到执行器两个通信通道上都存在DoS攻击的情况,更符合现实工业生产的控制场景.
4) 给出观测器增益矩阵L、控制器增益矩阵K和事件触发矩阵Φ的联合设计准则.
本文的其余部分如下:第2节为DoS攻击下的网络化控制系统的问题描述和系统建模;第3节涉及OBMETPC的稳定性分析;第4节通过仿真实例验证了DoS攻击下OB-METPC的可行性;最后,第5节得出最终结论.
本文的符号定义见表1.
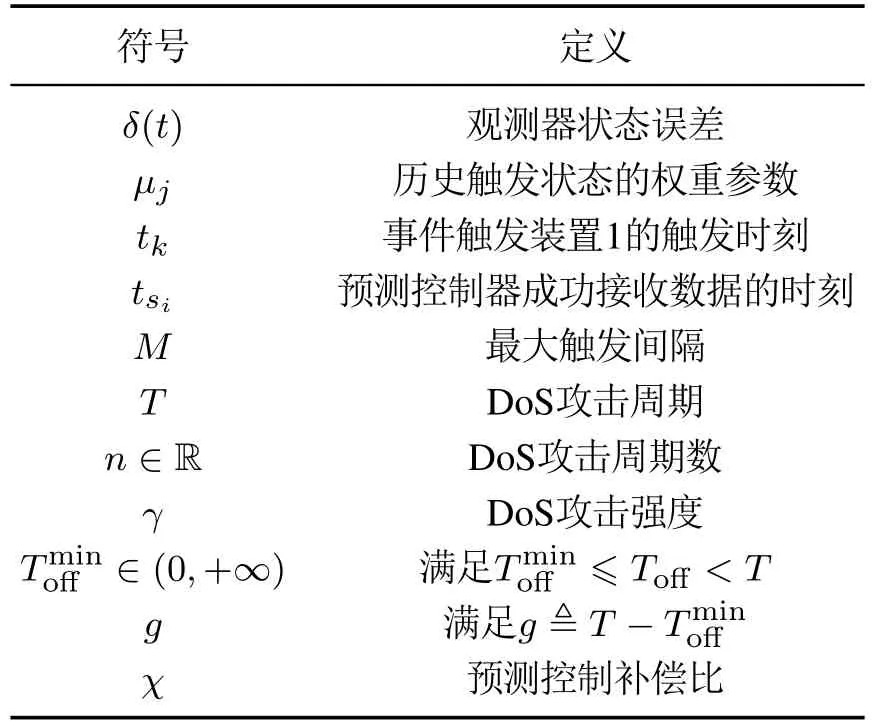
表1 符号说明Table 1 Notation
2 问题描述与系统建模
2.1 基于记忆型事件触发控制的网络化控制系统
网络化控制系统的动态演化规律用以下离散系统来描述:

其中:x(t)∈Rn为状态矢量,u(t)∈Rm为控制矢量,y(t)∈Rq为输出矢量.A,B,C为系统(1)的适当维数矩阵,K为反馈增益矩阵.系统(1)的初始状态是x(t0)x(0).
全维状态观测器描述如下:

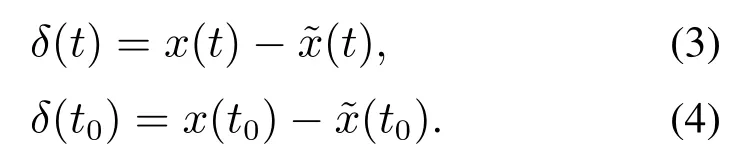
观测器的误差系统可以描述成

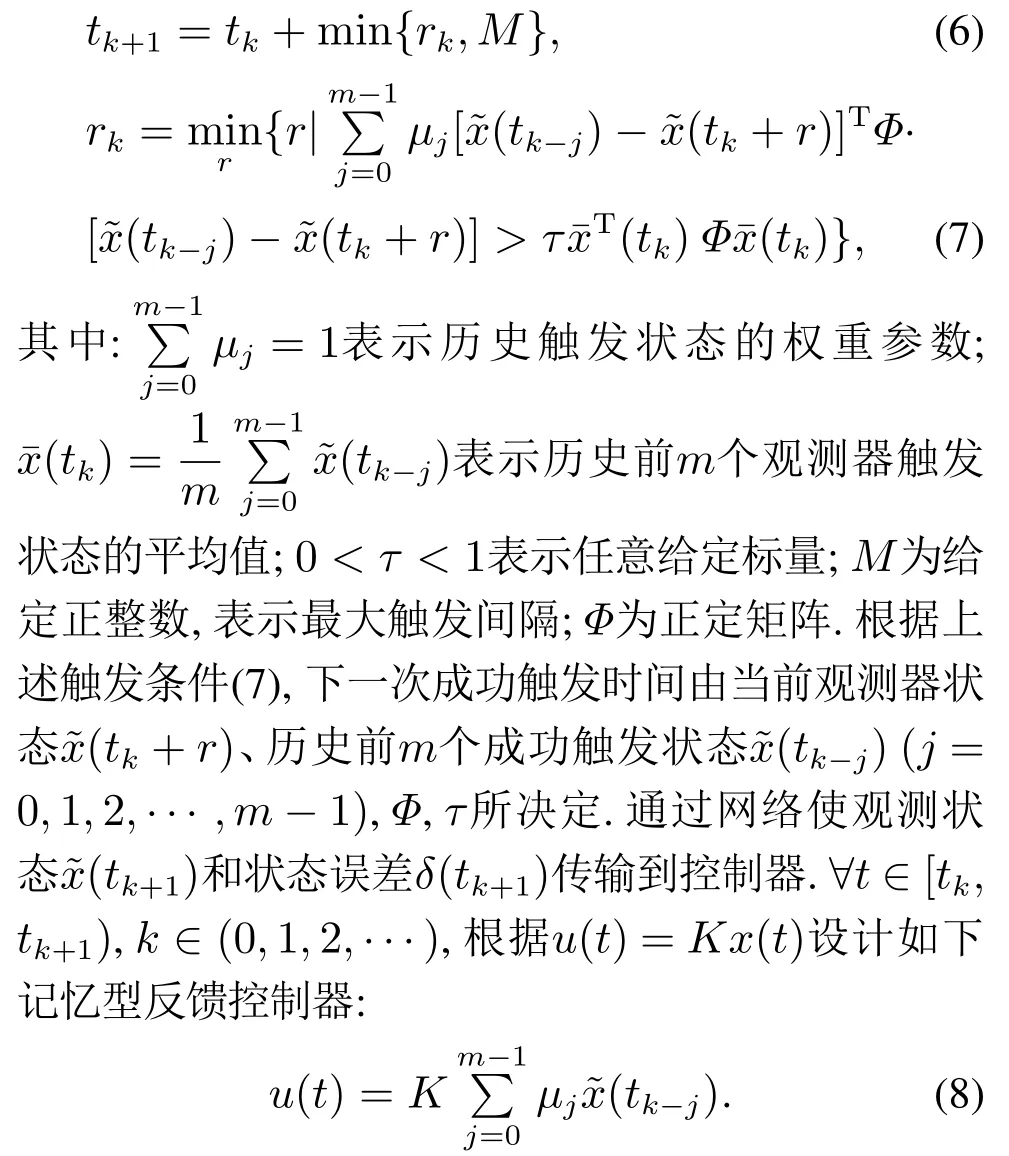
为了提高网络带宽资源的利用率,本文在传感器侧引入记忆型事件触发装置1,用于判断是否需要向控制器侧发送数据包.如图1所示,引入缓冲区1用于储存前m个触发状态.当有新的触发状态(tk+1)存入缓冲区1则会相应剔除历史触发状态(tk+1-m),使得缓冲区1中始终储存最新的m个成功触发的状态.
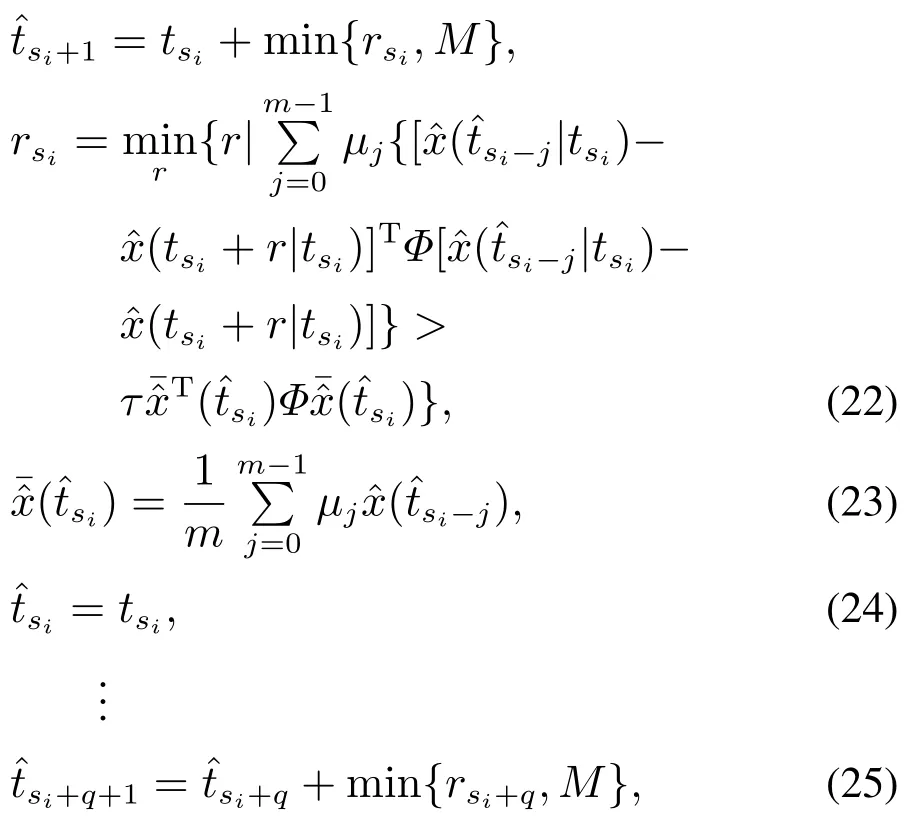
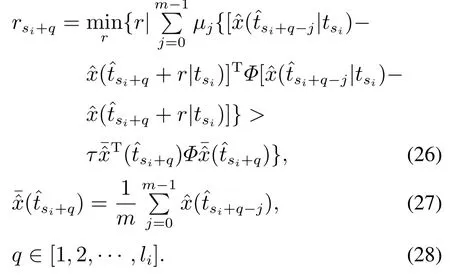
其中:记忆型事件触发装置1中的事件触发方案为:假设成功触发事件触发装置1的时间为tk(k1,2,···),成功触发记忆型事件触发装置1的观测器状态信息为(tk).下一个触发时刻为
假设1系统(1)采用等时采样.采样周期为h,所有数据包都带有时间戳.
假设2系统(A,B)完全能控,系统(A,C)完全能观.
2.2 周期性DoS攻击模型
考虑如下可变攻击时长的周期性DoS攻击[20]:

其中:T表示DoS攻击周期;Toff表示一个DoS攻击周期内系统不遭受DoS攻击的安全时长,n ∈Z+表示DoS攻击周期数,IDoS0表示无DoS攻击,IDoS1表示有攻击,攻击模型见图2.
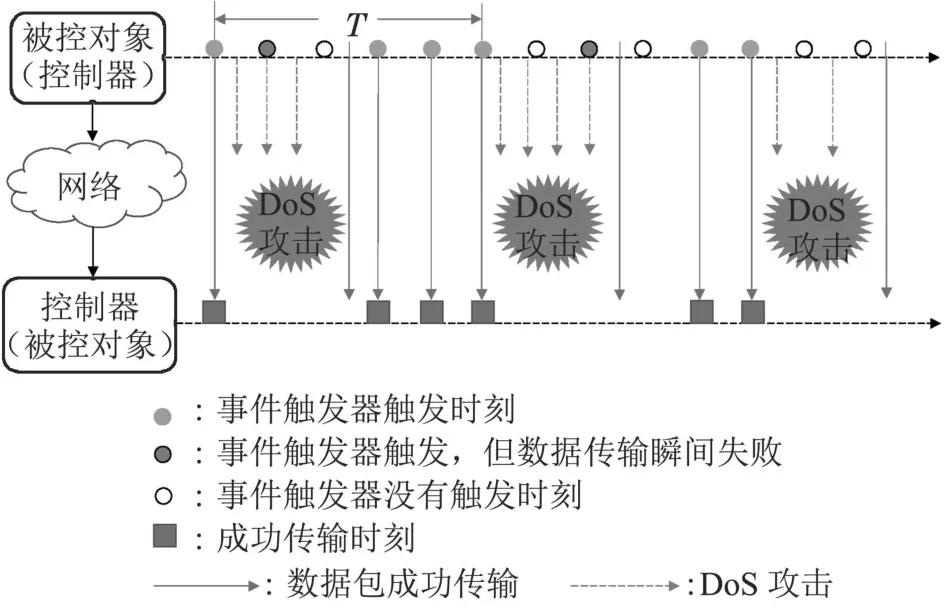
图2 周期性DoS攻击Fig.2 Periodic DoS attacks

假设4一个周期内DoS攻击的持续攻击时间为DoS的攻击强度γ.
假设5考虑的DoS攻击导致的数据包丢失率是100%,相邻两次DoS攻击的时间间隔大于M.
假设6对正整数n,DoS攻击周期T和系统采样周期h之间有如下大小关系:
2.3 DoS攻击下网络化控制系统事件触发控制模型
目前关于DoS攻击下预测控制器的研究大多是基于时间触发机制.为了对DoS攻击进行有效补偿的同时减少占用网络带宽资源,本节将事件触发机制和预测控制结合而成事件触发预测控制器.与此同时,为了更加充分地利用到历史的触发状态,本文设计了OB-METPC.假设系统的预测模型是已知的,基于METS的预测控制器设计结构如图3所示.
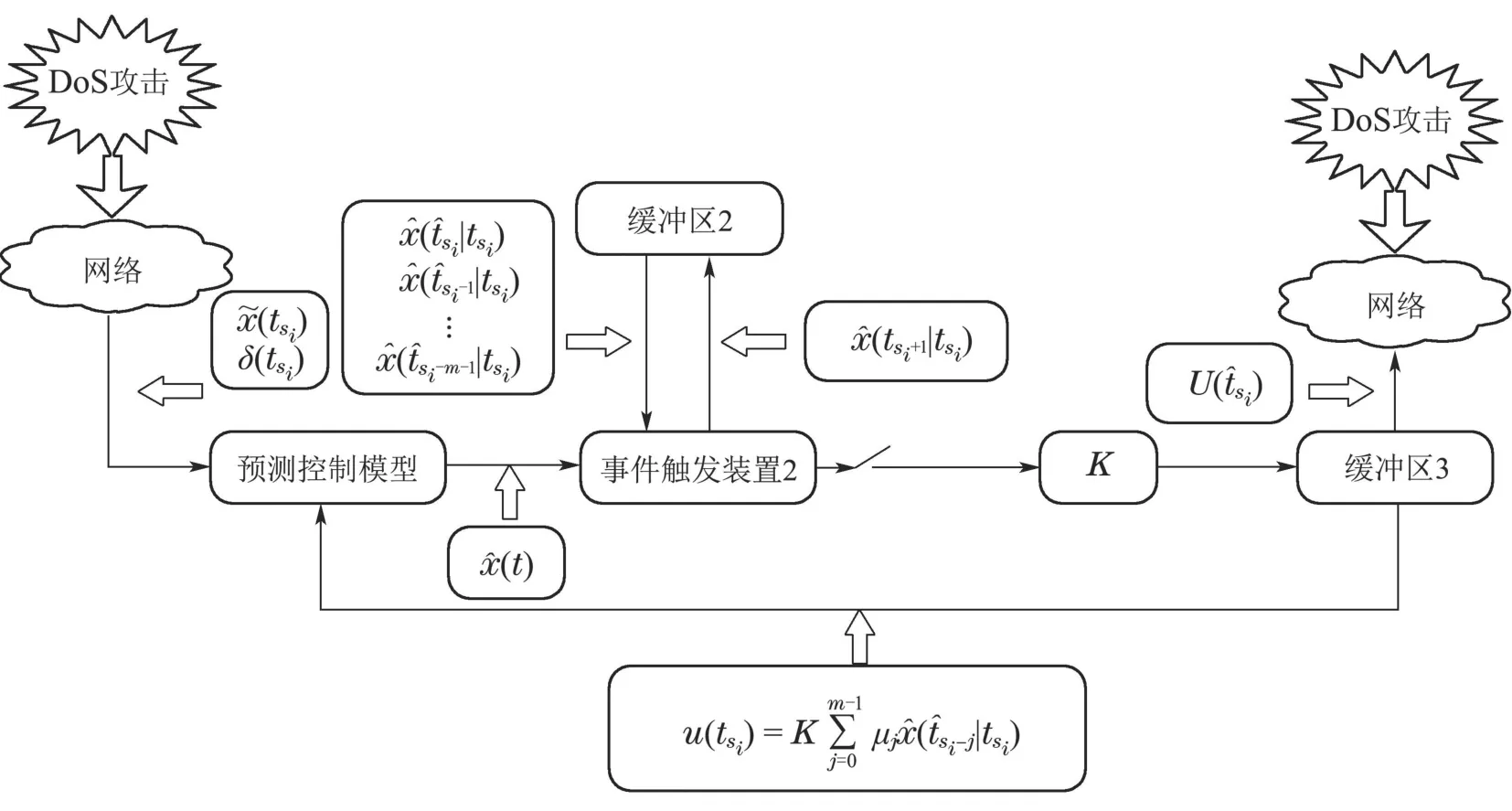
图3 DoS攻击下NCSs记忆型事件触发预测控制器Fig.3 METPC of NCSs under DoS attacks
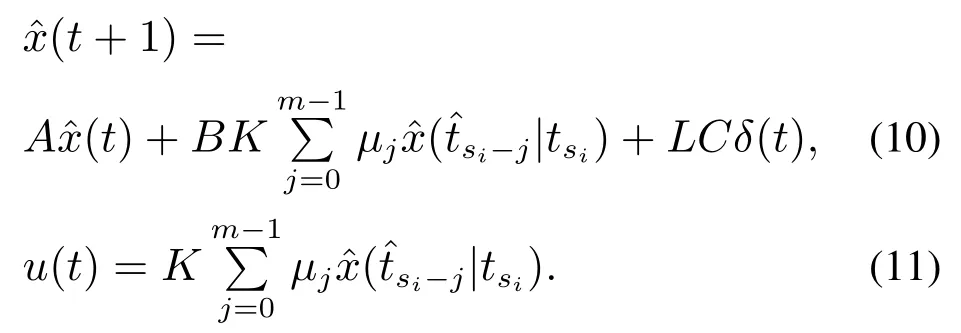
为主动补偿DoS攻击导致的状态数据包的丢失,在缓冲区3中选择前m个控制序列包用于预测新的状态信息.一旦预测控制器成功接收到观测器状态(tsi),预测控制器(11)基于(tsi)展开预测
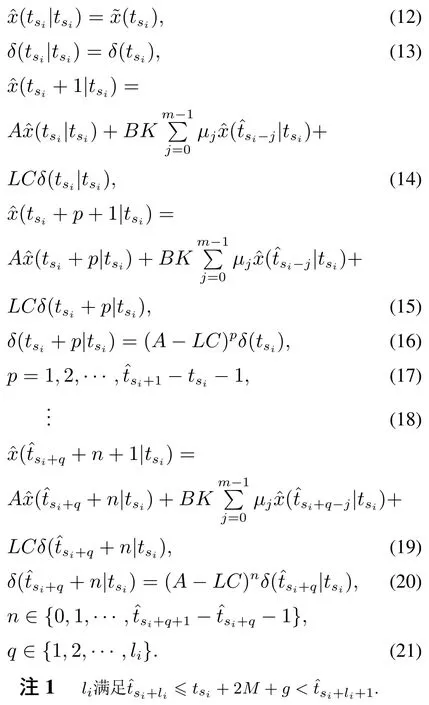
为了减小需要发送的预测控制序列数据包的大小,在预测控制器中引入记忆型事件触发装置2.成功触发的预测控制序列被打包成单个数据包,并通过通信网络发送到执行器端.是之后第1个触发记忆型事件触发装置2时刻
在记忆型事件触发装置2中引入缓冲区2用于储存前m个成功触发状态.成功触发记忆型事件触发装置2的预测状态数据包
卡尔曼滤波用状态方程和递推方法进行估计,根据前一个估计值和最近一个测量数据来估计信号的当前值,其解以估计值的形式给出。卡尔曼滤波算法如下[8]。

由式(11)可得,基于METS的反馈控制序列
则li个预测控制序列

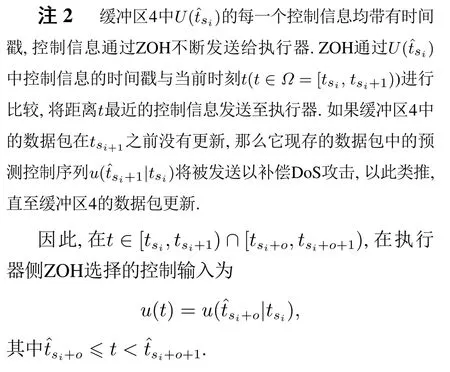
存储在缓冲器3中,供预测控制模型选择合适的控制序列进行预测.然后,预测控制序列U()将通过通信网络传输到执行器端,并且储存在缓冲区4中,供ZOH选择后发送给执行器,从而主动补偿DoS攻击对系统的影响.
3 OB-METPC的稳定性分析
3.1 OB-METPC的闭环系统
引理1由文献[18],比较观测器(2)、记忆型事件触发预测控制器(8)和预测模型(10),有必要提出以下关系用于证明闭环系统的稳定性:
引理2对于矩阵R >0和SST,有

其中ρ是任意的常数(见文献[12]).
根据观测器(2)、记忆型事件触发预测控制器(8)、预测模型(10)和引理1,事件触发条件(7)下主动补偿DoS攻击的闭环系统表示为
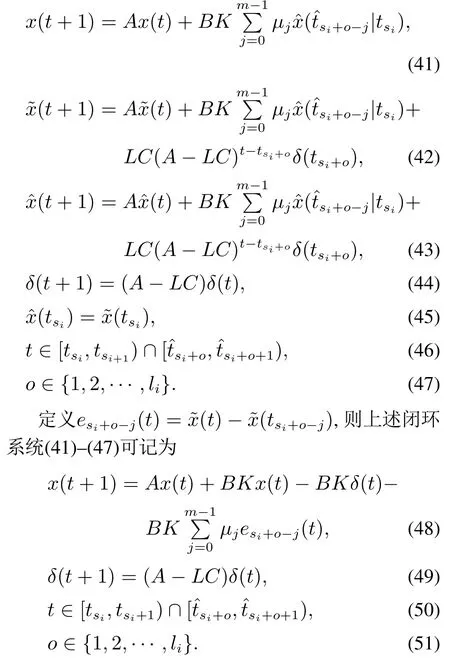
由事件触发条件(7)可得
3.2 稳定性分析
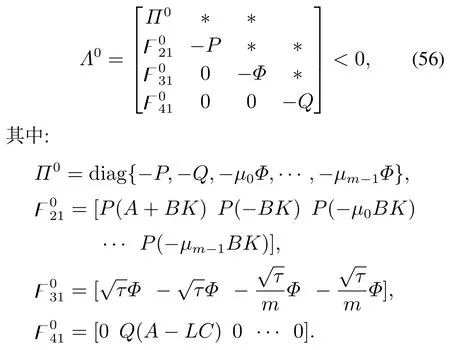
本节将设计出METS(7)下观测器增益矩阵L、状态反馈控制器增益矩阵K和事件触发矩阵Φ.
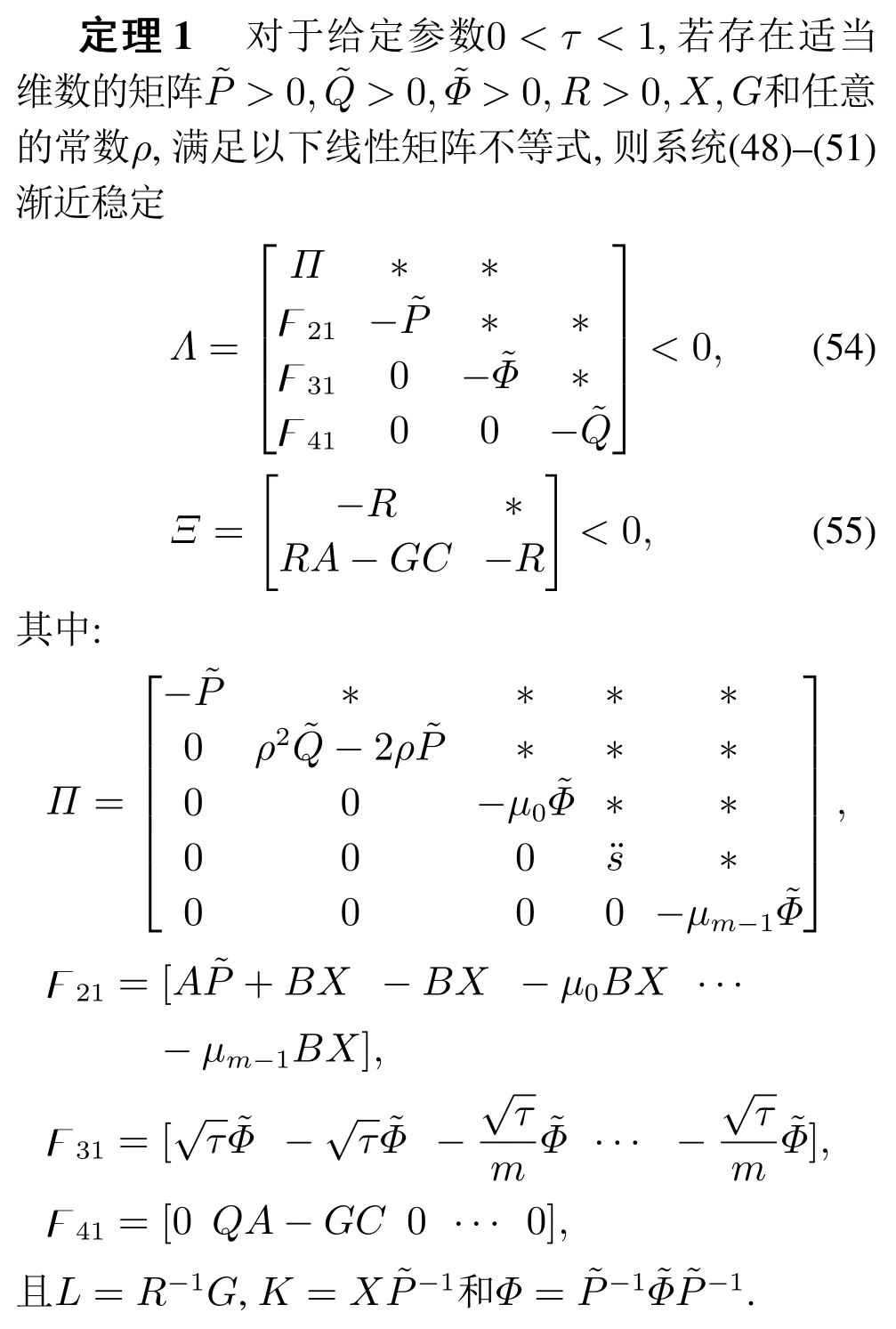
注3引入矩阵不等式(54)用于解决A-LC引起的非线性项问题.首先单独求解矩阵不等式(54)以解得L,再把解得的L代入矩阵不等式(53)中进一步求解相应矩阵不等式.
此定理的证明通过以下步骤完成:
步骤1构造Lyapunov函数

其中P,Q,R是对称正定矩阵.
步骤3由Schur补定理可得
对式(56)分别左乘、右乘对角矩阵

则矩阵不等式(56)可转化为

4 仿真实例
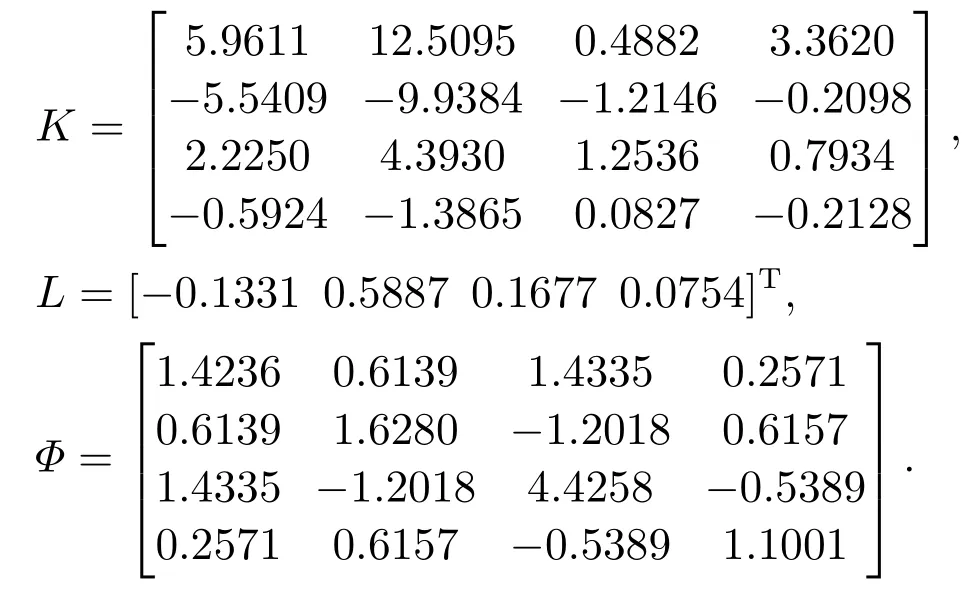
这一节,将OB-METPC应用于智能电网中的配电测试馈线的4-总线模型[21].设采样周期为h0.02 s,DoS攻击周期为T2 s,触发参数为τ0.0064,m4,μ00.1,μ10.2,μ20.3,μ30.4,ρ1,其他参数具体可参见文献[21].设矩阵C为

基于定理1,运用MATLAB求解得到相应的控制器增益矩阵K、观测器增益矩阵L和事件触发矩阵Φ分别为
通过比较不同攻击强度的DoS攻击来验证OBMETPC主动补偿攻击的有效性.其次,通过基于OBMETPC的3个不同模拟实验结果与其他两种主流DoS攻击补偿方案(分别为基于观测器事件触发预测控制OB-ETPC[22-23]和事件触发控制ETC[24-25])相比.
情况1DoS攻击下基于上述所求的K和L的OB-METPC和OB-ETPC的系统状态响应和事件间隔分别如图4和图5所示.
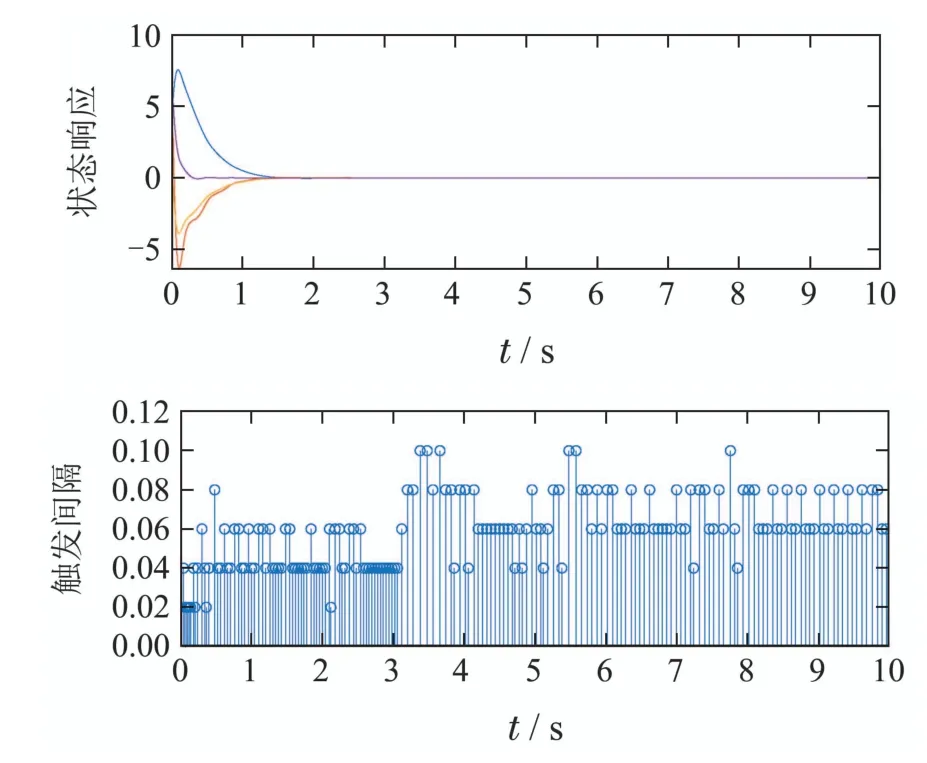
图4 DoS攻击下OB-METPC的状态响应和触发间隔Fig.4 State responses and triggering intervals of OBMETPC under DoS attacks
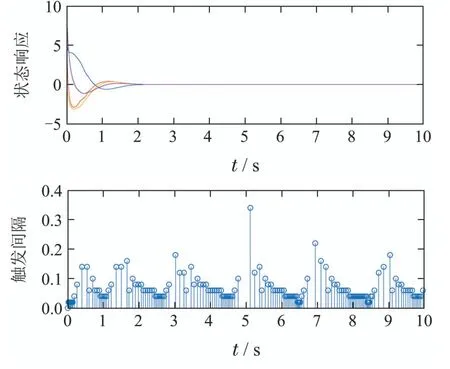
图5 DoS攻击下OB-ETPC的状态响应和触发间隔Fig.5 State responses and triggering intervals of OBETPC under DoS attacks
如图4和图5所示,无论是基于OB-METPC还是基于OB-ETPC的网络化控制系统,都能够在遇到DoS攻击时维持系统状态稳定.基于OB-METPC和OBETPC能够完全补偿任何攻击强度的DoS攻击(例如γ1 s或γ1.5 s)所造成的数据包丢失.其中:攻击强度γ1 s时攻击区间为(0 s,0.5 s)∪(1 s,1.5 s)∪(2 s,2.5 s)∪(3 s,3.5 s)∪(4 s,4.5 s)∪(5 s,5.5 s);γ1.5 s时攻击区间为(0 s,0.75 s)∪(1 s,1.75 s)∪(2 s,2.75 s)∪(3 s,3.75 s)∪(4 s,4.75 s)∪(5 s,5.75 s).
由表2和表3可得,在500次采样时间内,当NCSs遭遇弱DoS攻击后达到系统稳定时,基于OB-METPC的控制系统需要135个数据包;而基于OB-ETPC的控制系统所需的数据包数量为82个.当NCSs遭遇强DoS攻击时,系统的稳定在OB-METPC的控制下仅需25个数据包,而在OB-ETPC则需要46个.
表2 DoS攻击(γ1 s)下3种方案的对比Table 2 Comparison of the three schemes under DoS attacks(γ1 s)
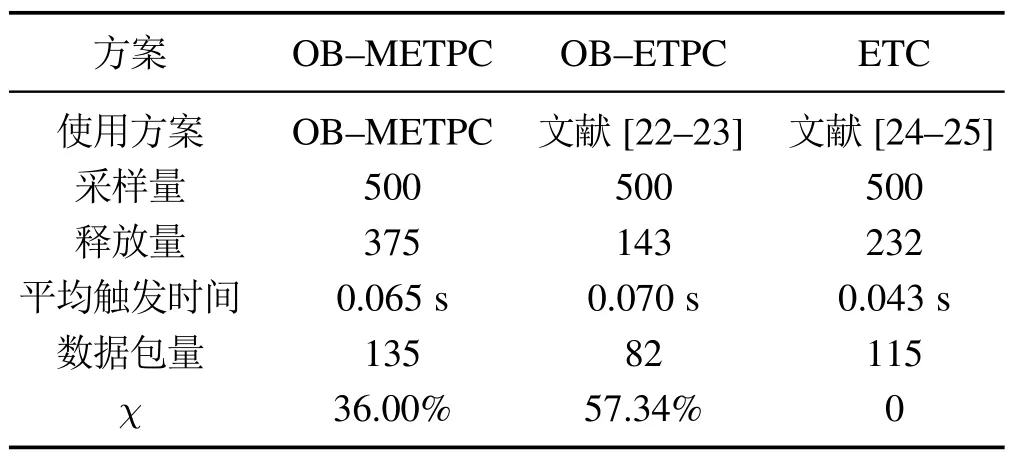
表2 DoS攻击(γ1 s)下3种方案的对比Table 2 Comparison of the three schemes under DoS attacks(γ1 s)
表3 DoS攻击(γ1.5 s)下3种方案的对比Table 3 Comparison of the three schemes under DoS attacks(γ1.5 s)
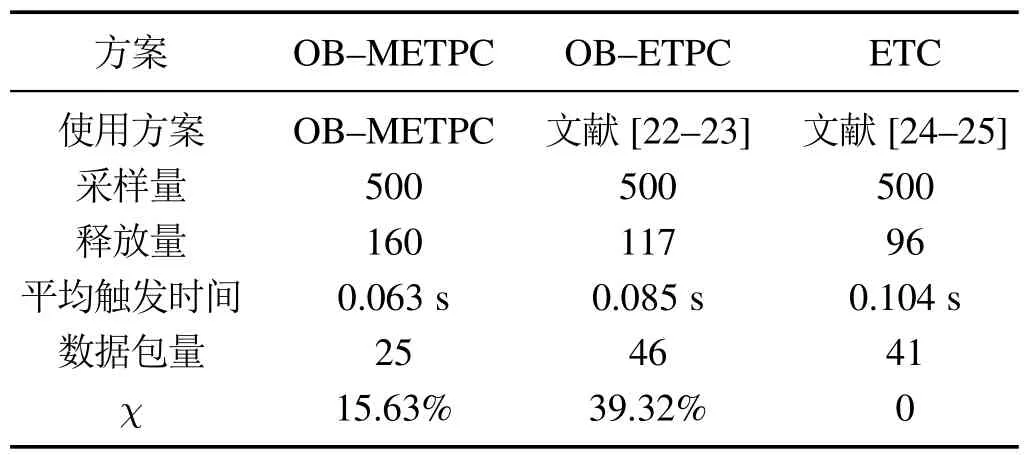
表3 DoS攻击(γ1.5 s)下3种方案的对比Table 3 Comparison of the three schemes under DoS attacks(γ1.5 s)
基于图6-7,NCSs的快速性指标调节时间及平稳性指标超调量,在改善系统动态性能方面,OB-METPC要优于OB-ETPC.在两种事件触发机制的触发次数相差不大的前提下,基于OB-METPC的网络化控制系统收敛于0.9%误差带的调节时间仅需1.34 s,而基于OB-ETPC的网络化控制系统收敛于2%误差带则需2.1 s.除此之外,基于OB-METPC的网络化控制系统的超调量为σ%7.583%,而基于OB-ETPC的网络化控制系统的超调量σ%>9.7%.OB-METPC不仅能够减少数据传输量,还能有效提升系统的动态性能.
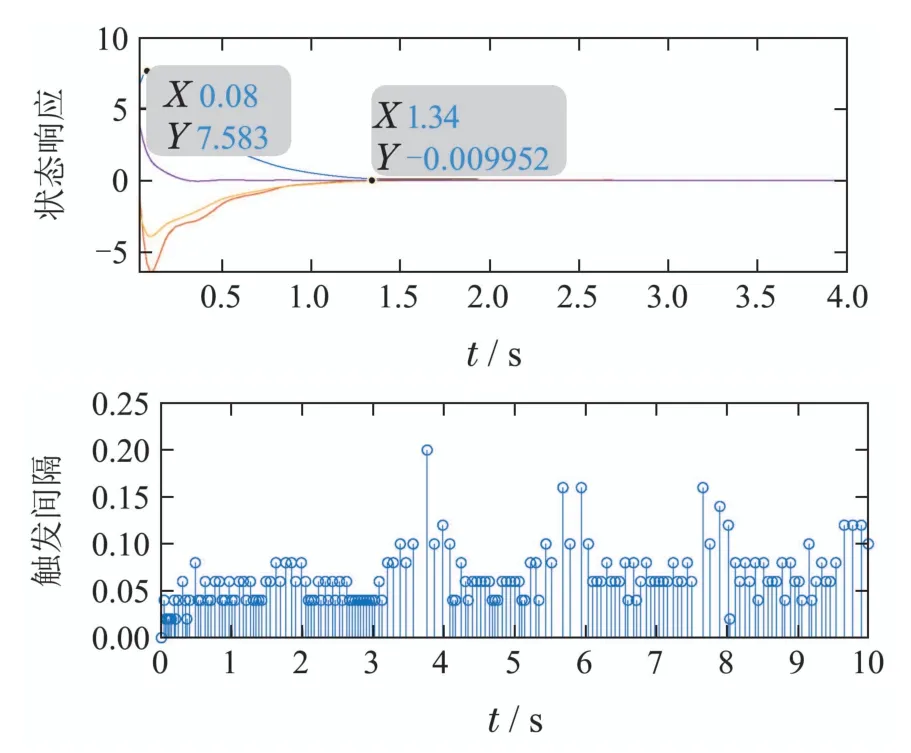
图6 DoS攻击下OB-METPC的动态性能Fig.6 Dynamic performance of OB-METPC under DoS attacks
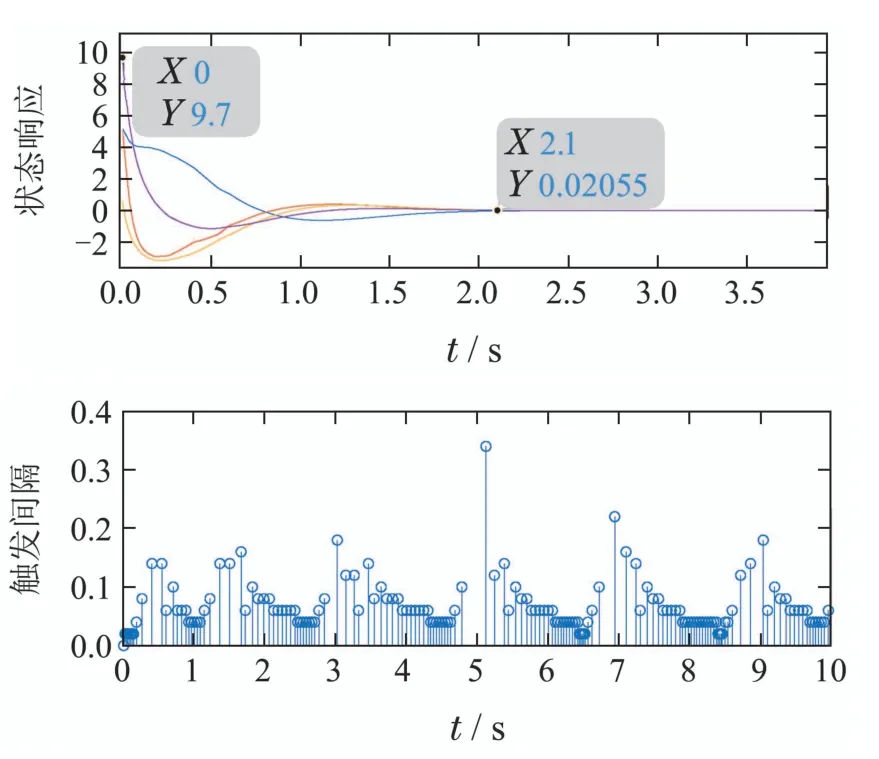
图7 DoS攻击下OB-ETPC的动态性能Fig.7 Dynamic performance of OB-ETPC under DoS attacks
情况2在弱DoS攻击(γ1 s)下,基于上述所求的K和L的OB-METPC和基于ETC的系统状态响应和事件触发间隔分别如图8和图9所示.基于ETC,OB-ETPC和OB-METPC3种方案的控制系统的比较见表2.由于仿真实例是在弱DoS攻击的上限进行的,基于ETC的方案遭受弱DoS攻击范围内的任意攻击,能够在一段时间后保持系统稳定.
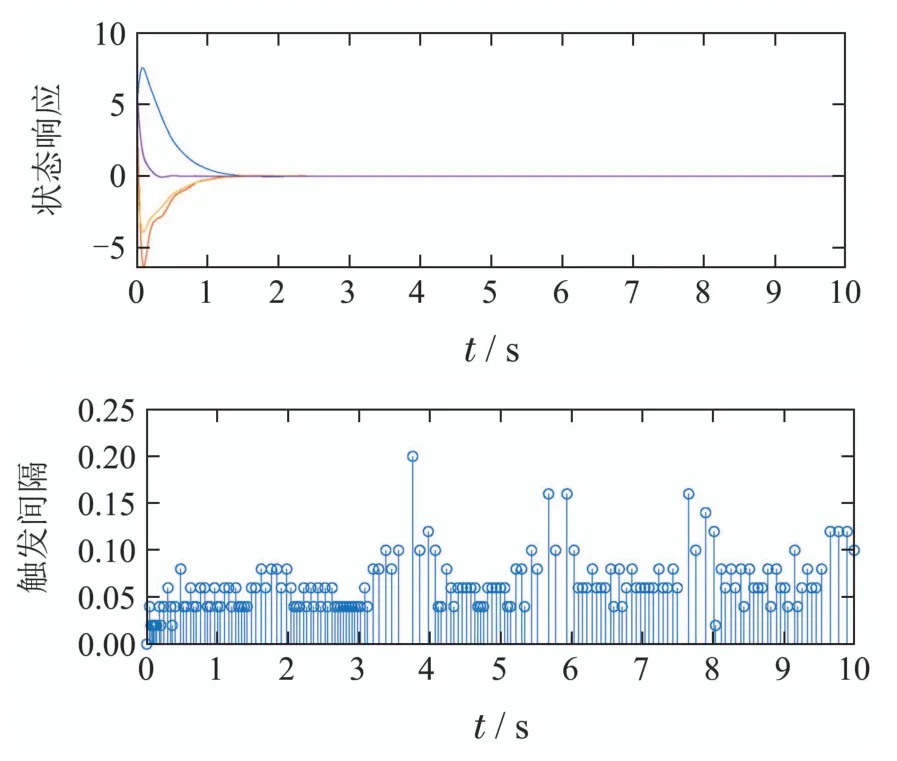
图8 DoS攻击(γ=1 s)下OB-METPC的状态响应和触发间隔Fig.8 State responses and triggering intervals of OBMETPC under DoS attacks(γ=1 s)
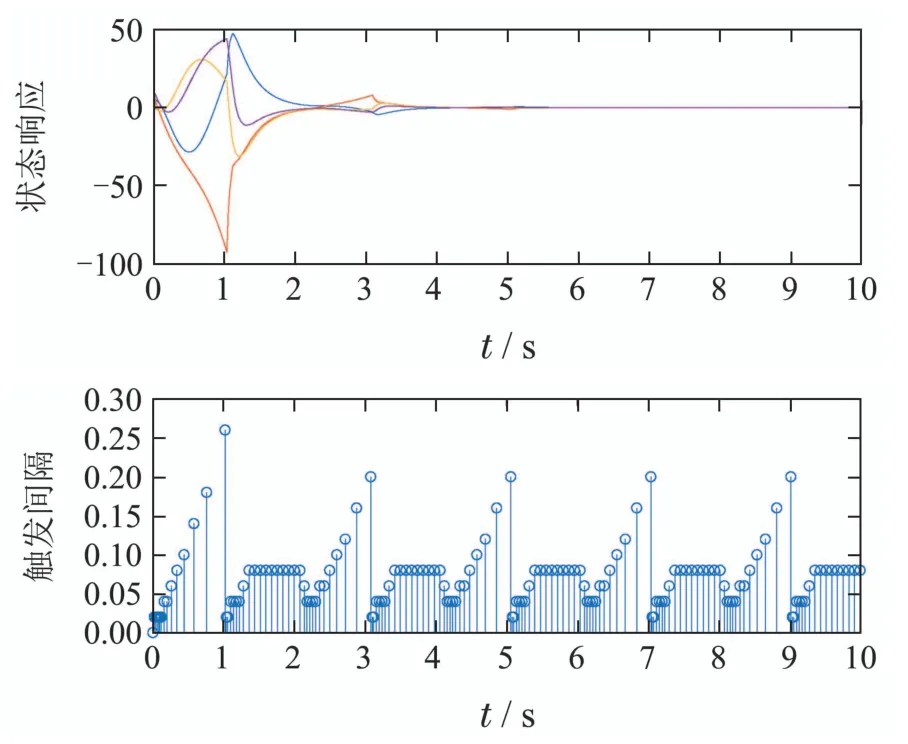
图9 DoS攻击(γ=1 s)下ETC的状态响应和触发间隔Fig.9 State responses and triggering intervals of ETC under DoS attacks(γ=1 s)
情况3在强DoS攻击(γ1.5 s)下,基于上述所求的K和L的OB-METPC和基于ETC的系统状态响应和事件触发间隔分别如图10和图11所示.基于ETC,OB-ETPC和OB-METPC3种方案的控制系统的比较见表3,其中:基于ETC的控制方案无法有效地维持系统的性能,最终基于ETC的控制系统失去稳定性.然而,由于OB-METPC可以完全补偿DoS攻击,在遭受强DoS攻击后,基于OB-METPC的控制系统仍然能够保持稳定.
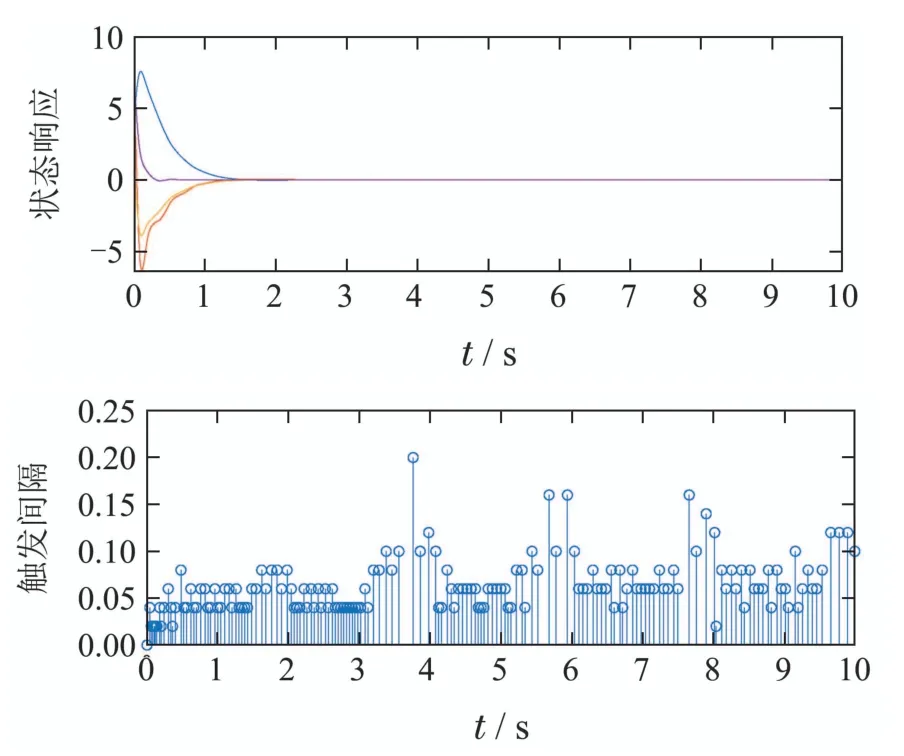
图10 DoS攻击(γ=1.5 s)下OB-METPC的状态响应和触发间隔Fig.10 State responses and triggering intervals of OBMETPC under DoS attacks(γ=1.5 s)
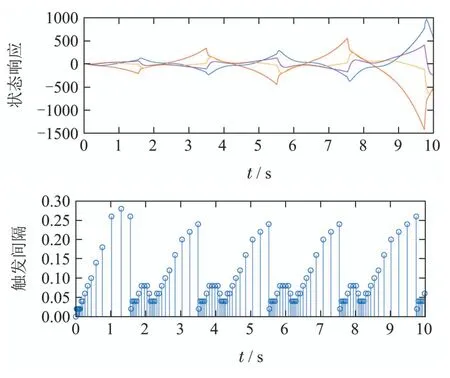
图11 DoS攻击(γ=1.5 s)下ETC的状态响应和触发间隔Fig.11 State responses and triggering intervals of ETC under DoS attacks(γ=1.5 s)
注4由于仿真实验中系统的状态是连续进行,即DoS攻击的补偿瞬间完成.因此,定义预测控制补偿比(χ)来衡量仿真实验中预测控制的补偿作用,其中预测控制补偿比为仿真实验中执行端数据包的接收量与事件触发装置1的触发次数(即通过事件触发装置1的数据包发送量)之比.基于OBMETPC能有效减少调节时间,从而达到了提升系统动态性能的效果.
5 结论
本文研究了在DoS攻击下网络化控制系统中基于静态观测器的记忆型事件触发预测控制问题.OBMETPC是一种解决DoS攻击问题新颖的方法.仿真实验结果表明,在系统中引入观测器和预测模型对补偿DoS攻击有重大影响.建立METS大大减少了预测控制序列补偿数据包的大小,同时充分利用了历史的触发状态,使得预测的数据包更加合理.实际应用表明该方法不仅可以主动补偿DoS攻击、改善系统的动态性能,还可以减少带宽资源占用,保证了DoS攻击下NCSs的稳定性能.
在未来研究中,OB-METPC有望解决通信失败下多智能体系统的一致性控制问题[5,13-14].
猜你喜欢
网络安全和信息化(2018年4期)2018-11-09 12:01:54
新闻传播(2016年11期)2016-07-10 12:04:01
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
河北大学学报(自然科学版)(2015年1期)2015-02-27 13:06:12
中国新通信(2014年11期)2014-09-11 19:27:52
中国人民大学学报(2014年5期)2014-04-16 05:32:42
电测与仪表(2014年11期)2014-04-04 09:21:36
食品工业科技(2014年15期)2014-03-11 18:17:43
