基于视觉和RFID复合导航的AGV设计与研究
2022-09-17 08:06王辉袁斌王伟博吴瑞明
机床与液压 2022年7期
王辉,袁斌,王伟博,吴瑞明
(浙江科技学院机械与能源工程学院,浙江杭州 310023)
0 前言
随着中国制造2025计划的深度推进,对智能设备的需求也不断提高。自动引导小车(Automated Guided Vehicle,AGV)作为智能制造中的重要组成部分,在智能车间、物流仓储、医疗等领域发挥越来越重要的作用。但是,目前AGV在实际应用过程中往往存在导航精度和轨迹柔性难兼顾的现象,这也是AGV在很多领域推广应用的难点。
根据导航方式对AGV进行分类,可以分为磁导航、色带导航、激光导航、惯性导航、即时定位与地图构建(Simultaneous Localization and Mapping,SLAM)导航、复合导航等。不同的导航方式对应不同的需求,其中磁导航和色带导航应用最广泛,具有精度高、运行稳定、成本低等优点,但轨迹柔性较差;激光导航可以满足生产需求,但需要安装发射板,成本相对较高;惯性导航在导航过程中存在累计误差,因此需要定期进行矫正,且精度高的惯性元件价格较高;SLAM导航分为激光雷达和双目视觉两种,对于实现高精度的导航在技术上还存在难点,数据计算量大且算法复杂;复合导航是结合两种以上方法,优势互补完成定位导航。肖献强等提出一种利用二维码与惯性导航组合的方式进行定位导航,取得了较好成果,但存在视觉识别二维码效率低的问题,不利于AGV高效运行。
针对上述情况,提出一种基于视觉和RFID复合导航的方式。采用地标图像中嵌入射频卡的策略建立网格型地图,当AGV处于两个站点之间时,通过识别AGV前方站点的位置来评估当前是否偏离预期轨迹;当AGV接近拐点时,RFID传感器读取到站点信息后AGV进入低速模式,为转弯纠偏做准备;当AGV到达站点时,由AGV正下方的视觉传感器评估AGV相对于站点的横向、纵向、角度误差,并进行补偿。为提高转角的准确性,先根据运动模型得到的转角进行初步转弯,再利用安装在AGV前方的视觉传感器获得的偏角进行角度调整。在传感器捕捉位置信息时引入卡尔曼滤波来降低抖动产生的干扰。
1 AGV结构与运动模型
基于视觉和RFID复合导航的AGV主要结构如图1所示。
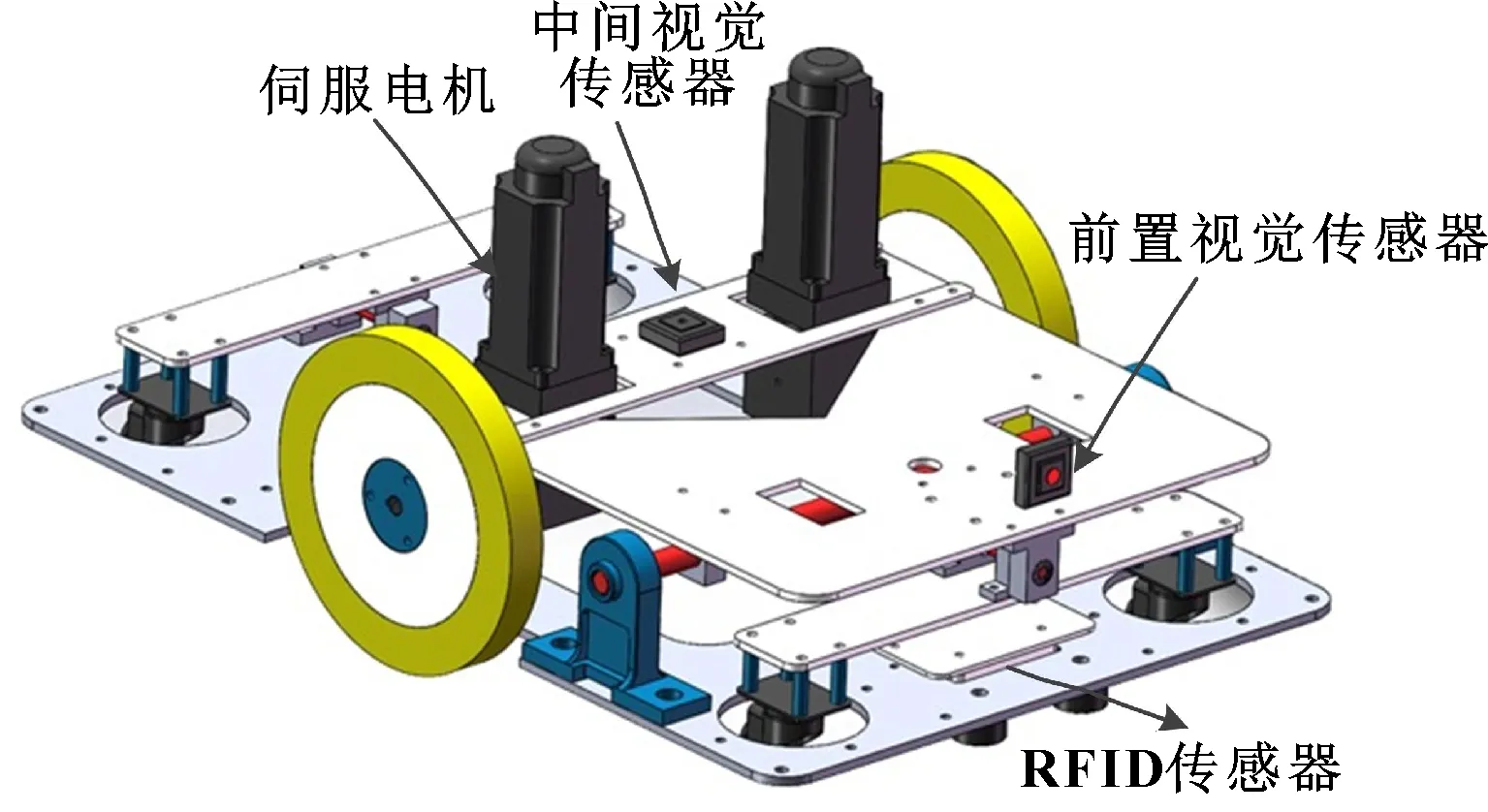
图1 AGV主要结构示意
AGV采用两轮差速方式驱动行驶,并在前后分别安装两个万向轮做支撑。AGV上安装两个视觉传感器,分别用于捕捉AGV正下方图像信息和正前方地面的图像信息。RFID传感器安装在底盘前方位置,用于检测是否即将到达站点和读取坐标信息。
在运动过程中,由控制器发送指令给伺服驱动器,从而控制电机转速并调整AGV姿势。根据两轮差速原理建立运动学模型如图2所示。AGV在某时刻的位姿可以表示为=[,,],其中:、为AGV所在的二维平面坐标点;为AGV的偏转角。
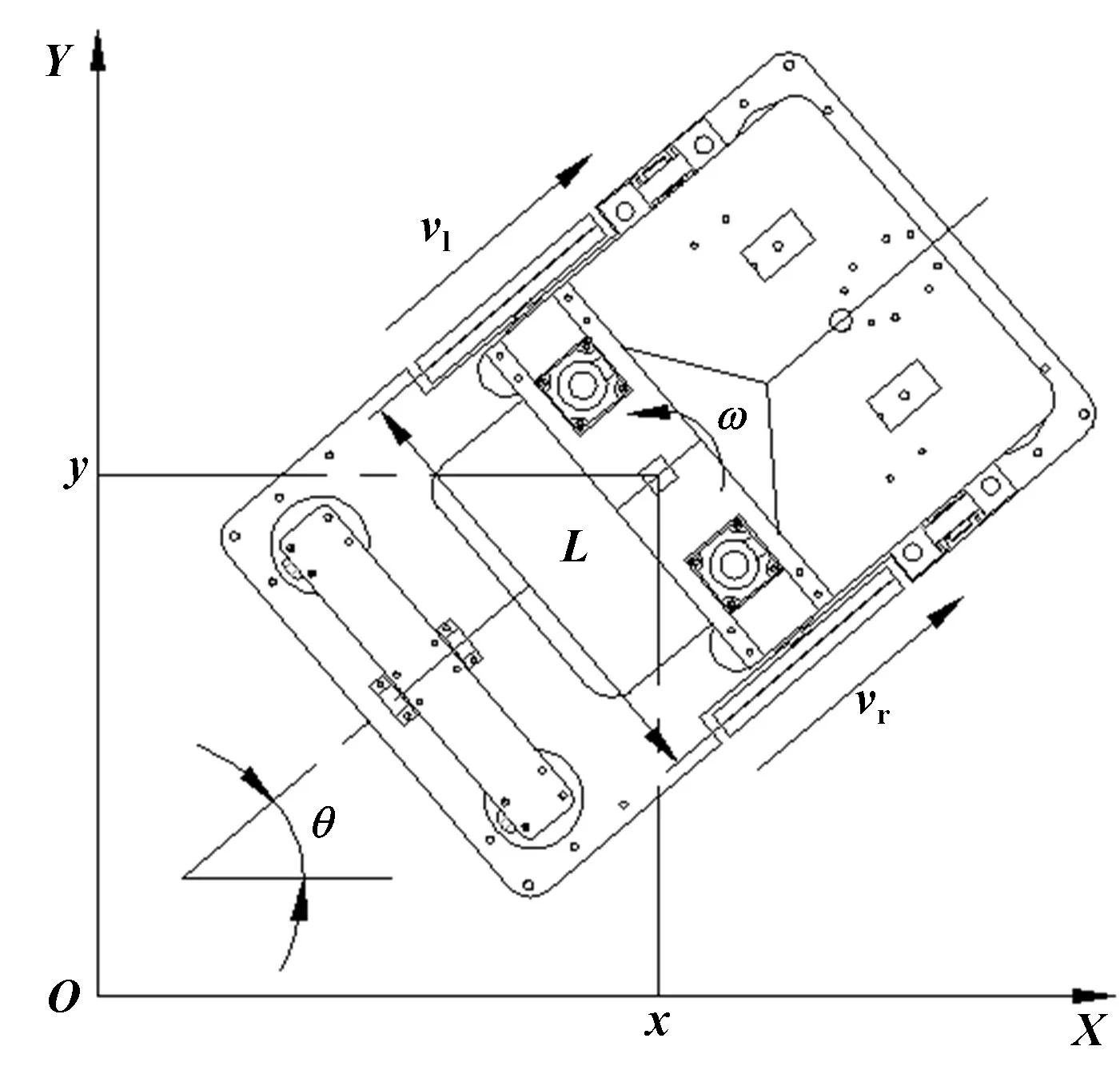
图2 AGV运动学模型
假设时刻左轮速度为,右轮速度为,AGV质心的移动速度和角速度可以表示为

(1)
式中:为两驱动轮之间的距离。
根据式(1),轨迹曲率圆半径和瞬时转角Δ可以表示为
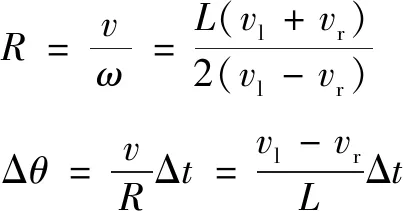
(2)
根据上述公式将速度和角速度离散化可以得到AGV任何时刻的姿势,如式(3)所示:
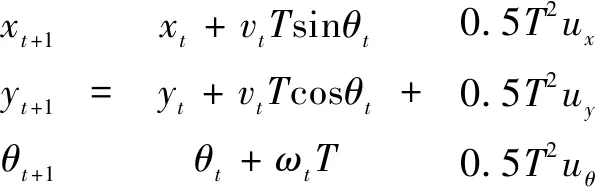
(3)
式中:为采样周期;、、为控制量。
根据式(2)可建立直线行驶时角度误差和轨迹误差模型:
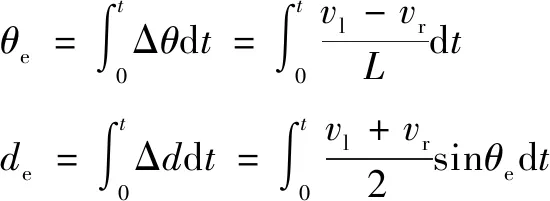
(4)
根据AGV的运动模型建立Simulink仿真模型,结果表明:AGV在直行时轨迹误差较小,但经过转弯后,转角存在误差使得轨迹出现较大误差。因此,提高AGV转角的精度对AGV定位导航具有重要意义。
2 AGV总体框架与导航方法
2.1 AGV总体框架
图3所示为AGV的框架,AGV总控制器为PC,主要负责处理摄像头数据、与云端Socket通信、与STM32控制器串口通信;STM32控制器主要用于接收RFID传感器的数据,并解码和控制电机驱动器。

图3 AGV总体框架示意
2.2 AGV路径构建
采用地标图像中嵌入射频卡的形式构建地图,射频卡中的信息为00000000~99999999,前四位为横坐标,后四位为纵坐标,AGV路径地图如图4所示。
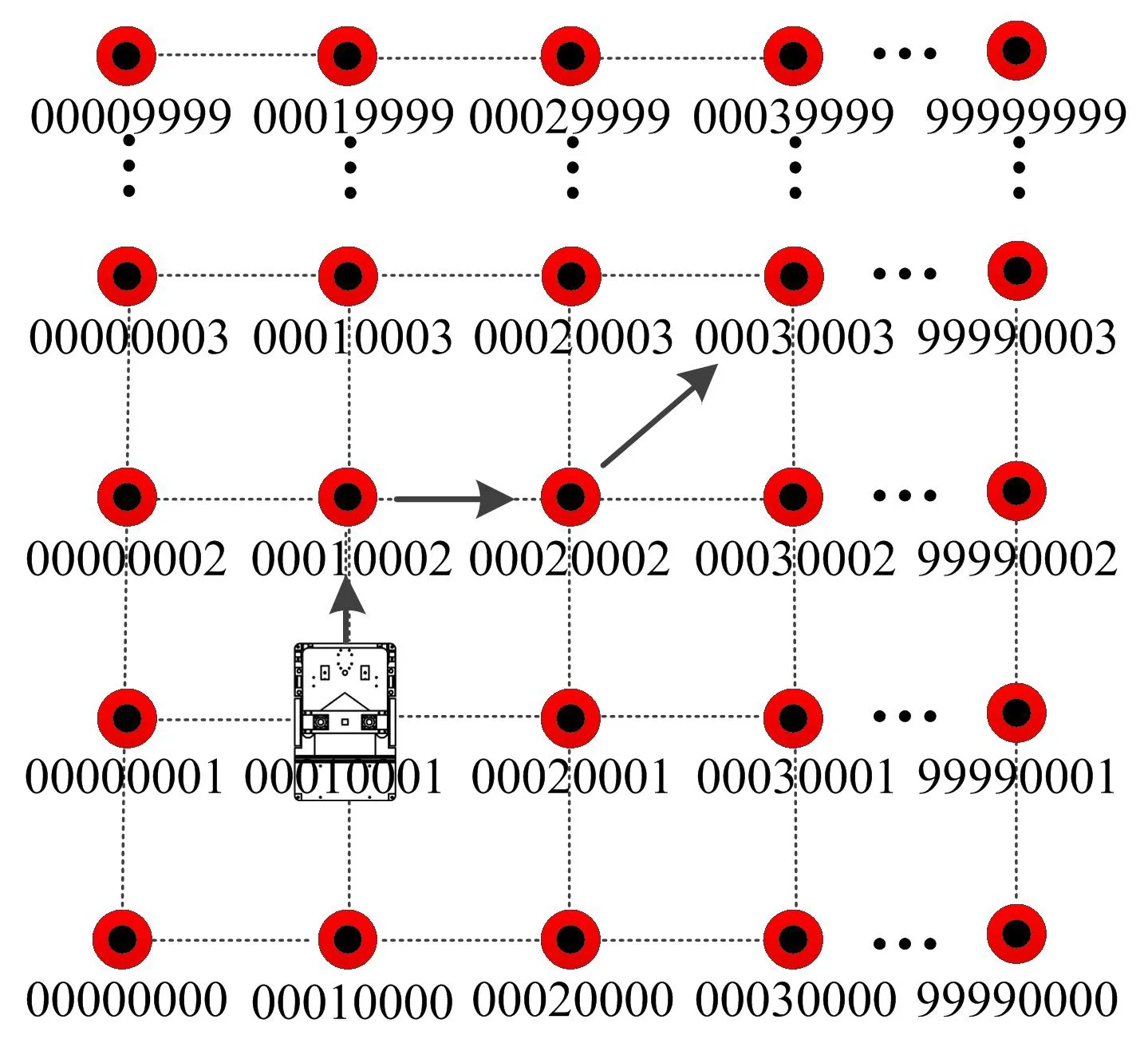
图4 AGV路径地图示意
已知AGV起始姿势为[0001,0001,90],终点姿势为[0003,0003,0],可以通过遗传算法等路径规划算法得出最优路径,然后将最优路径写入控制器。如图3所示的路径转化为自定义控制指令,可以表示为(10000)、(12090,10000)、(11045,10000)、(12045),其中:10000为直行指令;12090为右转90°;11045为左转45°;12045为右转45°。
2.3 视觉图像检测
摄像头在使用前需要进行畸变矫正处理,因此利用MATLAB视觉工具箱进行标定。
中间摄像头安装在距离地面18 cm高的位置,主要用于检测AGV经过站点时的轨迹误差。为方便计算轨迹误差,将图像坐标进行平移旋转变化,图像中心为坐标原点。图像变换公式如下:
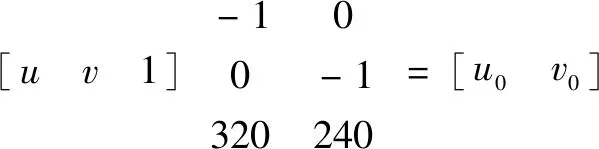
(5)
式中:、为原图像坐标;、为变化后的坐标。
站点上的圆形图案采用霍夫变换进行检测。根据霍夫原理,将笛卡尔坐标转化为霍夫坐标,圆上的点在霍夫空间为三维曲线,并且同一个圆上的点在三维空间中交于一点,如下所示:
(-)+(-)=
(6)
将式(6)所示的笛卡尔坐标转为霍夫坐标:

(7)
根据原理设定半径和重合点数量的阈值,检测结果如图5所示。
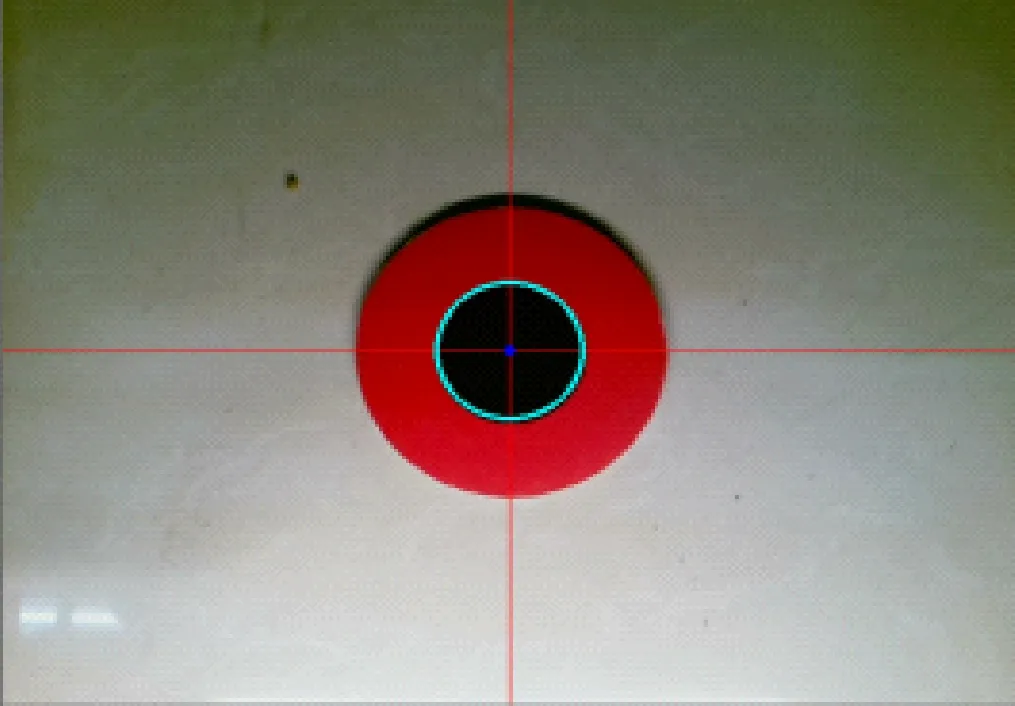
图5 霍夫变换圆检测结果
检测AGV前方站点时,首先,将摄像头采集的 RGB图像转换为HSV图像并设置红色阈值;然后进行二值化和轮廓检测,为增加检测的抗干扰能力,在轮廓检测时引入轮廓面积、轮廓周长来筛选图案轮廓;最后,作最小外接矩形并计算中心像素坐标。检测结果如图6所示。
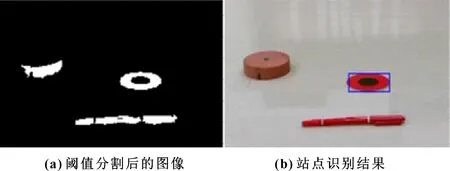
图6 地标检测结果
AGV在运动过程中存在不可避免的抖动和摄像头采集数据不稳定的问题,所产生的随机误差可以看作白噪声,因此在图像采集过程中引入卡尔曼滤波。通过摄像头获取地标相对于AGV的位置,对位置坐标(,)进行滤波处理,减少随机误差的干扰。参数状态方程和观测方程分别如式(8)、式(9)所示:

(8)
()=()+()
(9)
式中:(+1)为+1时刻的状态;+1、+1为+1时刻地标相对于AGV的坐标;为像素坐标与世界坐标的比例关系;Δ、Δ为时刻的坐标增量;()为过程噪声;()为时刻的观测值;()为观测噪声。
2.4 轨迹控制方法
为降低打滑、抖动等因素对轨迹产生的影响,对不同运动阶段采用不同的控制速度,在转弯和检测地标时采用较低速度,直线行走时采用较快速度。
图7为AGV从启动到转弯的各阶段控制示意。可知:AGV在0~时,加速度为;在~时,AGV处于两个站点之间,速度保持在行驶;在~时,RFID传感器检测到下一站点坐标,并判断是否需要转弯,需要转弯时AGV开始减速;在~时,保持低速行驶,并等待AGV正中间的摄像头检测到地标图案;在~时,速度降低至0,计算并补偿轨迹误差;在~时,开始转向并补偿转角误差;在~时,AGV开始加速往下一站点行驶。

图7 各阶段控制示意
在经过转弯或终点站时,AGV会进行位置和角度的补偿。如图8所示,矫正由状态(1)~状态(5)组成,首先由正中间的摄像头检测到地标图像位置,然后进行像素坐标与世界坐标之间的转化,得到角度和位置误差。
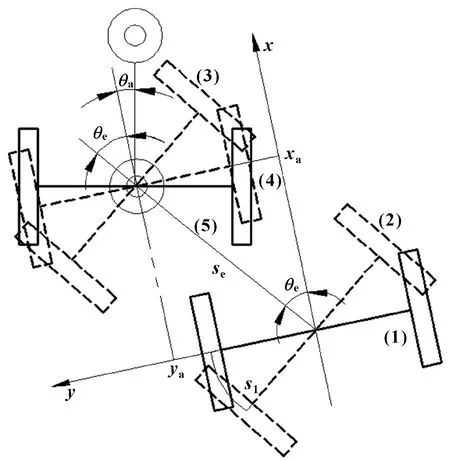
图8 纠偏控制方法示意
当前AGV姿势下,误差可由式(10)表示:
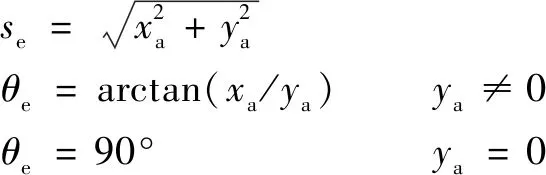
(10)
式中:为位置误差;、为站点相对于AGV的位置坐标;为角度误差。
根据差动轮驱动原理,将偏角转化为轮子移动距离:
=(×)2
(11)
调整角度后,向前行驶距离到达状态(3)的位置,然后向反方向旋转,最后根据AGV前方摄像头计算出AGV转弯后偏离的并矫正误差。
在运行过程中,将摄像头观测到的轨迹误差和角度误差输入PID控制器中进行调整,加快系统响应。增量式PID表示如下:
Δ()=[()-(-1)]+()+[()-(-1)+(-2)]
(12)
式中:、、为PID中的3个参数;为期望与观测之间的差值。
3 实验与分析
采用自主设计的AGV小车作为实验设备,如图9所示。AGV主要参数:车身大小700 mm×450 mm×350 mm;两轮间距435 mm;最大移动速度1 m/s;地标间距1 m。对AGV进行原地旋转测试、正方形路径测试、8字形路径测试。

图9 AGV实物
3.1 原地转弯测试及分析
原地转弯测试主要是检测AGV转弯时,转角大小对位置精度的影响。AGV在转弯时处于低速状态,因此测试时轮子速度为0.2 m/s。旋转过程分为两部分:左转弯360°、右转弯360°,误差如图10所示。可知:原地转弯时,前360°转弯的、向误差基本在3 mm内,后360°转弯误差在5.5 mm内。
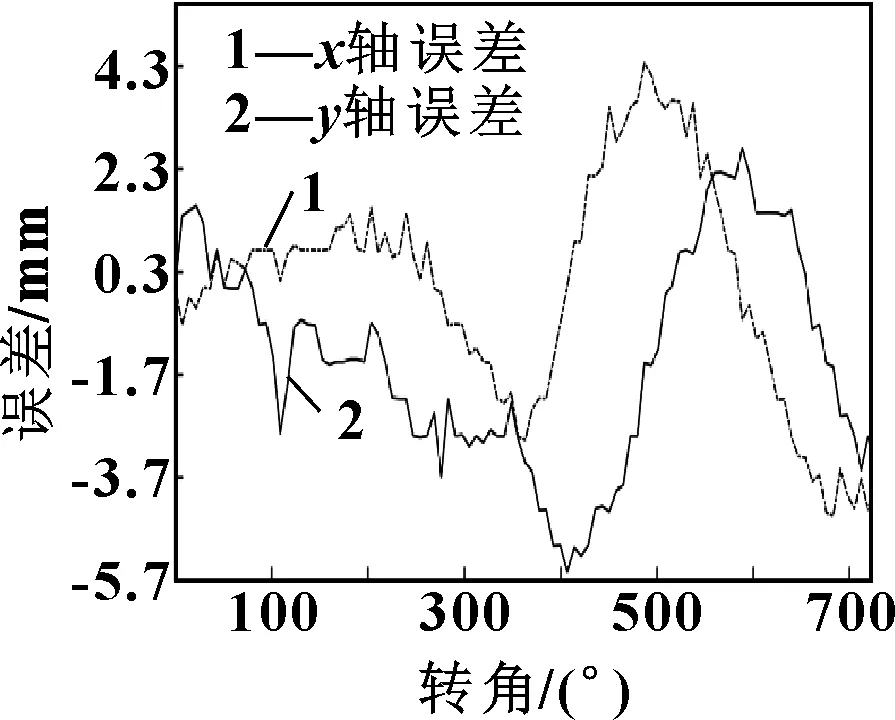
图10 原地转弯 位置误差
3.2 正方形和8字形路径测试及分析
正方形路径测试和8字形路径测试分别是为了检测AGV连续拐弯情况和拐弯带直线行驶情况的路径和角度精度,两者的路径如图11所示。图12、图13所示分别为测试路径的轨迹误差和角度误差。可知:正方形路径的轨迹误差最大值为24.5 mm,平均误差为4.6 mm,角度误差最大值为1.4°,平均误差为0.7°;8字形路径的轨迹误差最大值为25.0 mm,平均误差为7.1 mm,角度误差最大值为1.2°,平均误差为0.6°。在测试过程中,AGV可以自动完成纠偏,并将误差保持在一定值内,与文献[16]中的导航方式得到的平均轨迹误差12 mm、角度误差1°相比,有所提升。
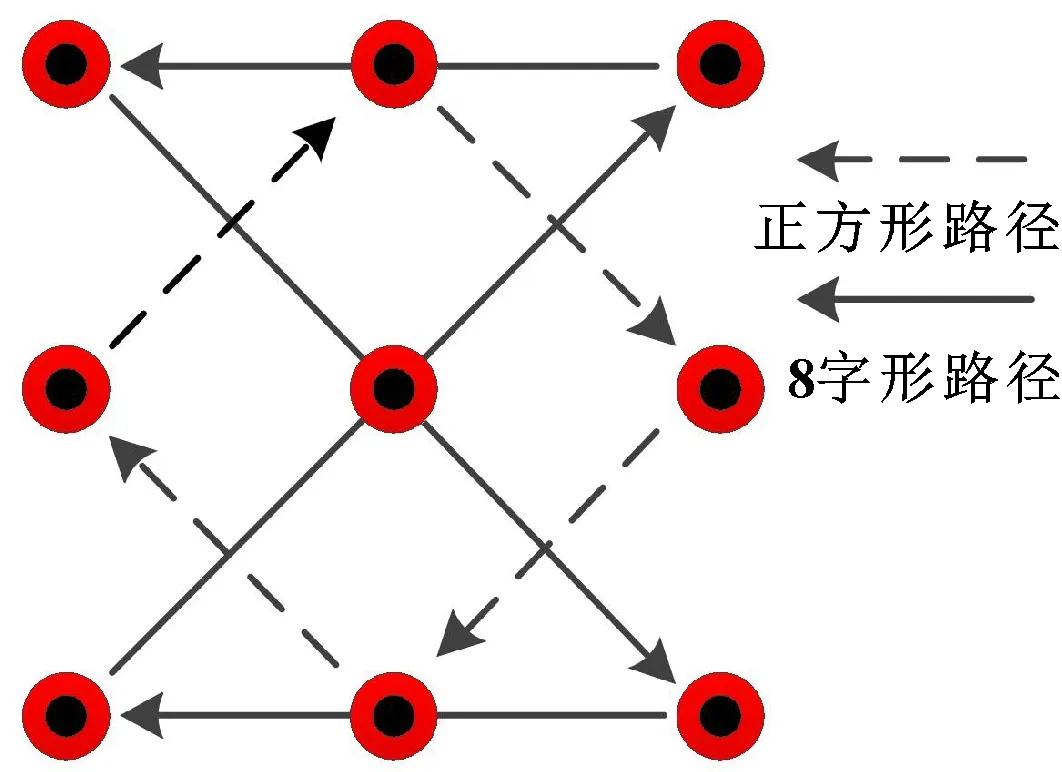
图11 测试路径示意

图12 测试路径的轨 图13 测试路径的角
4 结论
本文作者提出一种基于视觉和RFID技术相结合的AGV复合导航方法。利用RFID技术快速识别地标中的射频卡信息,并得出AGV坐标;利用视觉识别地标与AGV的相对位置关系,并矫正轨迹、方向偏差,既能保证路径柔性,又可兼顾导航精度。采取两种路径进行测试,结果表明:平均轨迹偏差为5.85 mm,平均角度偏差为0.65°,该AGV基本满足实际生产需求。研究结果为解决AGV定位导航问题提供了参考。
猜你喜欢
福建中学数学(2021年1期)2021-02-28
小资CHIC!ELEGANCE(2021年44期)2021-01-11
党的生活·党员电教与远程教育(2019年9期)2019-12-02
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
党的生活·党员电教与远程教育(2017年9期)2017-10-17
课堂内外(小学版)(2017年3期)2017-04-15
故事会(2016年21期)2016-11-10
中学生数理化·七年级数学人教版(2016年6期)2016-05-14
党的生活·党员电教与远程教育(2014年12期)2015-02-09