
电液伺服系统的预设性能自适应抗扰控制
2022-09-16 07:25田川刘鹏博刘灿王闯
机床与液压 2022年14期
田川,刘鹏博,刘灿,王闯
(1.中航机载系统共性技术有限公司,航空工业机载系统共性技术工程中心,江苏扬州 225000;2.齐鲁工业大学(山东省科学院)机械与汽车工程学院,山东济南 250353;3.山东省机械设计研究院,山东济南 250031)
0 前言
电液伺服系统以其传输效率高、响应速度快、输出功率大和控制精确性高等优势,成为航空航天、汽车和能源等工业系统领域中的重要执行装置。近年来,随着各工业系统对极限性能的追求,电液伺服系统的研究得到了国内外从业人员的进一步关注,在机构改进、性能分析和控制设计等方面均得到了深入的探讨和显著的优化。
在控制设计上,电液系统的伺服能力直接影响它在被控系统中的性能指标,因此大量研究都围绕如何抑制干扰、使系统对特定信号跟踪性能达到预期指标展开。电液伺服系统是一种典型的多源干扰系统,它在工作中受到自身强非线性、模型不确定性、泄漏干扰、摩擦力矩扰动和外部负载力矩扰动等多源内外扰动的影响。这些扰动均可能使电液伺服系统的控制性能变差,甚至导致系统不稳定。另一方面,电液伺服系统所受部分干扰的幅值和频率随工况和任务的变化而变化。这些都给电液伺服系统的控制和干扰补偿器设计提出了新的挑战。尽管研究人员针对这类系统已设计了滑模控制、鲁棒自适应控制和反步法自适应控制等先进控制方案,解决系统所受干扰、保证系统控制性能,但需要指出,上述控制方法利用高增益和自适应的方式处理系统受到的扰动,而未对干扰进行特别的关注和处理,其控制性能仍受限于多源扰动的影响。
针对上述问题,基于干扰/不确定性估计和补偿的方法成为了解决电液伺服多源扰动的新选择。已有工作是通过设计干扰观测器或扩张状态观测器对电液伺服中存在的各类扰动进行估计,并在闭环系统中对所估计的干扰进行补偿,一定程度上进一步提升了系统的鲁棒性。文献[7]提出一种基于频域干扰观测器的滑模控制方案,估计和抵消电液伺服系统的摩擦干扰。文献[18-19]均在自抗扰控制的框架下,利用扩张状态观测器对系统集总干扰进行主动估计和补偿,提升伺服系统控制性能。但需要注意,上述基于干扰观测器的控制方法难以对幅值和频率易受工况改变的扰动进行良好的估计和补偿。另外,在干扰估计-补偿的基础上,虽然一些外环控制器采用了自适应等控制器,但系统输出对参考信号的跟踪误差,无法按照预期的性能收敛,限制了系统的伺服性能。
基于上述考虑,本文作者针对电液伺服系统提出一种基于自适应扩张状态观测器(Extended State Observer, ESO)的预设性能抗扰控制方法。在所提出的控制方案中,设计自适应ESO对系统的内外扰动进行估计,通过对观测增益的自适应设计改进ESO在不同工况、不同任务下的干扰观测能力。在外环,受启发于预设性能控制设计,提出一种基于障碍Lyapunov函数和反步设计的自适应预设性能控制器,将系统的跟踪误差限制在预设的时变界限范围内。具体设计步骤:分析所研究的电液伺服系统动力学模型及所面临的控制问题;针对电液伺服系统设计自适应ESO,对估计系统的状态与干扰进行估计,并设计预设性能自适应控制器获得预期的高精度伺服性能,其中采用神经网络方法对系统所受摩擦干扰和虚拟控制律的导数进行自适应估计;利用Lyapunov方法分析闭环系统的稳定性;通过仿真试验验证所提方法的有效性。
1 电液伺服系统模型与问题描述
1.1 电液伺服系统动力学模型
文中考虑的电液伺服系统结构如图1所示,控制器通过电液伺服阀对液压油的速度和方向进行调节,从而实现对液压缸位置的控制。整个电液伺服系统包含电气、液压和机械传动三部分。由于在作动器工作时,阀的动态要远快于其他部分(如液压缸、弹性负载、液体流动等)的动态,在整个电液伺服系统的控制带宽内,忽略伺服阀的动态而将它等效为一个比例环节,不会影响控制器的设计和闭环系统的控制性能。
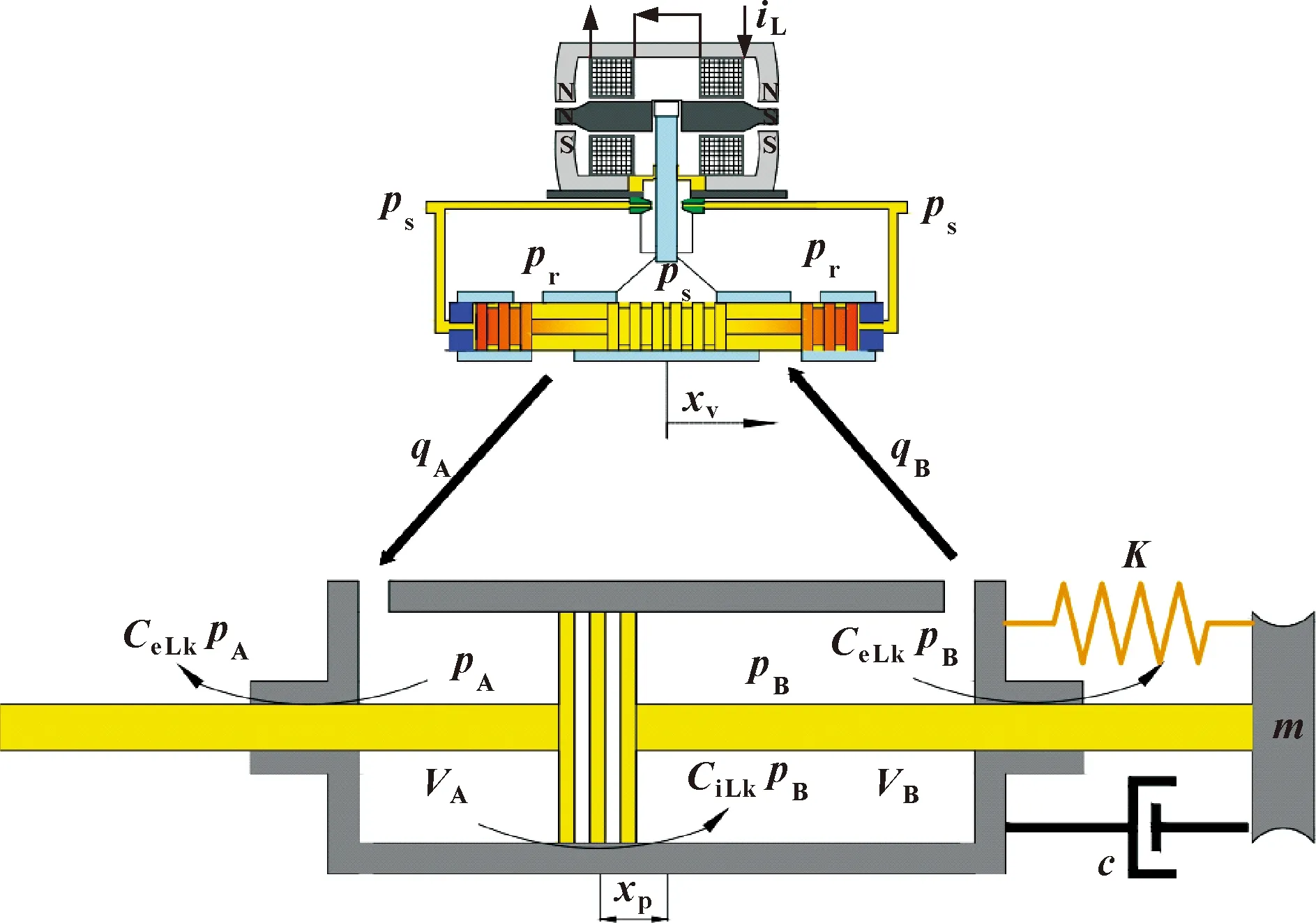
图1 电液伺服作动器结构示意
(1)电气部分
根据文献[7],图1中电液伺服阀的阀芯位置可简化为
=
(1)
式中:表示伺服阀的阀芯位置,m;表示伺服阀力矩电机的输入电流,mA;表示电液伺服阀的等效增益,m/mA。
(2)液体部分
电液伺服系统的伺服阀流量-压力特性方程可以表示为

(2)
式中:表示负载流量,m/s;为流量系数;为伺服阀阀芯的面积梯度,m;为泵的供给压力,N/m;为压差,N/m;为液压油的密度,kg/m; sgn()为符号函数。
对每个执行器室应用连续性定理,可得液压缸流量连续性方程:
(3)
式中:为活塞位置,m;为活塞受压面积,m;为整个执行器的容积,m;为总泄漏系数,m/(N·s),而=+/2,其中为内泄漏系数,为外泄漏系数;为液压流体的有效体积弹性模数,N/m。
结合式(2)和(3),可得执行机构的液体动力学方程为
(4)
(3)机械部分
通过牛顿第二定律,可得液压缸和负载的力平衡方程为

(5)
式中:为活塞质量,kg;为负载等效刚度,N/m;为黏性阻尼系数,N·s/m;为外负载力,N;为摩擦力,N。

(6)

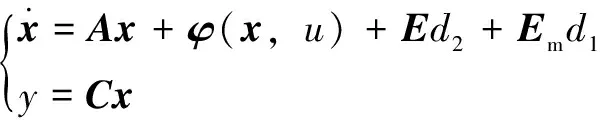
为不失一般性,对干扰和作如下假设:
假设1:干扰有界,有界且可导,且其倒数有界,即=,且存在正常数、和,满足:
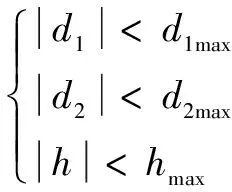
(7)
1.2 问题描述
对于电液伺服系统[式(7)],它具有非线性强、受多源干扰影响的特点,其伺服精度受多源干扰和工况、任务影响大。传统的控制方案,如PID、滑模控制和基于干扰观测器的控制方案难以完美地解决上述问题,使电液伺服系统在不同工况、执行不同任务时均保持良好的伺服性能,系统位置跟踪误差无法始终保持在预期范围内。因此,本文作者的目标是设计一种如图2所示的基于自适应扰动估计的预设性能控制方案,包含自适应ESO和预设性能反馈和干扰补偿控制器两部分,以改进电液伺服系统的干扰抑制性能和控制性能。
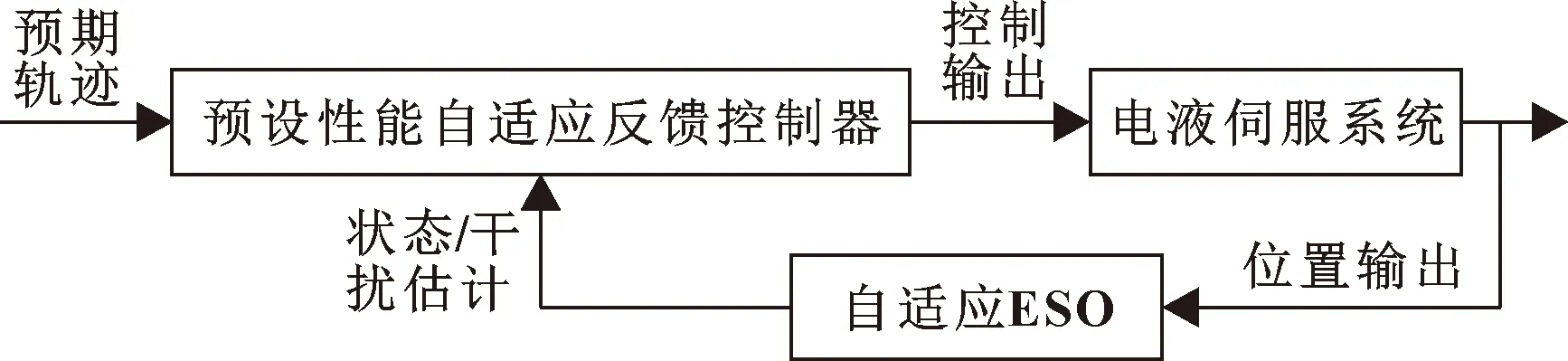
图2 电液伺服系统控制框架
2 系统控制器设计
2.1 自适应扩张状态观测器设计
在进行系统控制器的设计时,首先针对电液伺服系统[式(6)]设计自适应状态观测器,对系统的状态与干扰进行估计。
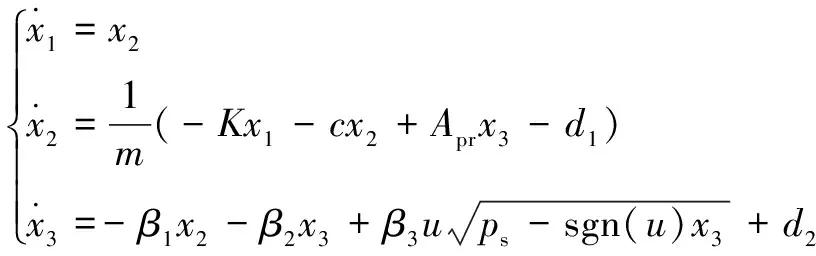
将系统[式(6)]写作如下格式:
(8)
式中:

定义干扰为系统扩张状态,即=,则系统[式(8)]可表述为如下的扩张状态系统:
(9)
式中:
对系统[式(9)]作如下假设:

引理1:存在对称正定矩阵,单位矩阵,实数>0以及常数,=1,…,4,满足如下关系:

(10)
+≥δ
(11)
式中:
在假设1、2以及引理1下,可针对系统[式(9)]设计如下自适应ESO:

(12)

另外,()为自适应ESO[式(12)]中的自适应增益函数,按照更新公式(13)进行调整:

(13)
式中:()为矩阵的最大特征值。由式(13)可得到关于()的特性:

(14)

定理1的证明:


(15)

将()简写为,并将()简写为。选择如下Lyapunov函数:
=()()
(16)
由式(15),可得对时间的导数为




(17)
利用Young氏不等式,可得:

(18)
考虑不等式(17)、(18)和假设2,可得:



(19)

(20)
(21)
由式(20)和(21),可计算估计误差界限为

(22)

(23)

2.2 预设性能反步控制器设计
在自适应ESO[式(9)]的估计下,对系统[式(6)]设计预设性能的自适应控制器及干扰补偿器。
2.2.1 障碍Lyapunov函数
为使系统跟踪误差按照预设的性能收敛,文献[21]提出一种时变正切型障碍Lyapunov函数:
(24)
式中:表示系统输出误差;表示时变误差约束边界,则:
=(-)e-+
(25)
其中:为的初值;为→∞时的稳态值,并满足0<<;>0,表示的收敛速度。
由文献[21]知,若系统输出误差初始值(0)满足|(0)|<,障碍Lyapunov函数[式(24)]可将系统误差约束在±时变边界内。
2.2.2 控制器设计
基于上述准备工作,设电液伺服系统[式(6)]的位置拟跟踪的期望轨迹为,控制目标即为令跟踪误差==-最终收敛于0,则预设性能的反步控制器设计方法如下:
步骤1,构造如下的障碍Lyapunov函数:
(26)
对求关于时间的导数,得:
(27)
式中:=-,为虚拟控制律,设计为
(28)
其中:>0,为常数。
将虚拟控制律[式(28)]代入式(27)中,可得:
(29)
步骤2,令=-,且由式(7)可得:

(30)
并设=-,而为虚拟控制律,进而可得关于时间的导数:

(31)

利用Sigmoid神经网络逼近,即:

(32)

(33)
其中:、、、为适当的参数。
设计虚拟控制律为

(34)

将式(34)代入式(31),可得:

(35)
选择如下Lyapunov函数:
(36)
式中:为一个大于0的常数。结合式(29)和(36),可得关于时间的导数为

(37)


(38)
其中:为大于0的常数。将式(38)代入(37),得:

(39)
步骤3,对求对时间的导数,得:
(40)
根据系统[式(6)]知:

(41)
其中:



将式(41)代入(40),得:

(42)
运用神经网络近似,具体为

(43)

设计如下控制律:

(44)

选取Lyapunov函数:
(45)
则对时间的导数为

(46)


(47)
代入到式(46)中得:

(48)
2.2.3 闭环系统稳定性分析
闭环系统的稳定性可归纳为如下主要结果。
定理2:考虑电液伺服系统[式(6)],设计自适应ESO[式(9)],虚拟控制律[式(28)]、[式(34)],自适应律[式(38)]、[式(47)]和反馈控制器[式(44)],则闭环系统的所有信号一致最终有界,且系统跟踪误差可被约束在时变边界(-,)。
证明:
选取Lyapunov函数:

(49)
对求导,得:

(50)
运用Young氏不等式,可得:




(51)


(52)
其中:


对式(52)不等式两边同时积分,得:
0≤()≤()
(53)
其中:

那么→∞时,有界,且满足0≤≤/。则由(=1,2,3)的定义和式(49)可知,闭环系统的所有信号均可保证一致最终有界。
且由式(49)和(53),可得:
(54)
进而得到:

(55)
由式(54)可知,系统跟踪误差被所设计的控制器约束在时变边界(-,)。
3 仿真验证
利用在MATLAB/Simulink平台构建的电液伺服系统进行仿真试验,对所提出的预设性能自适应抗扰控制方法进行控制性能验证与分析。其中,搭建的Simulink仿真模块如图3所示。仿真中运用的电液伺服系统参数如表1所示。
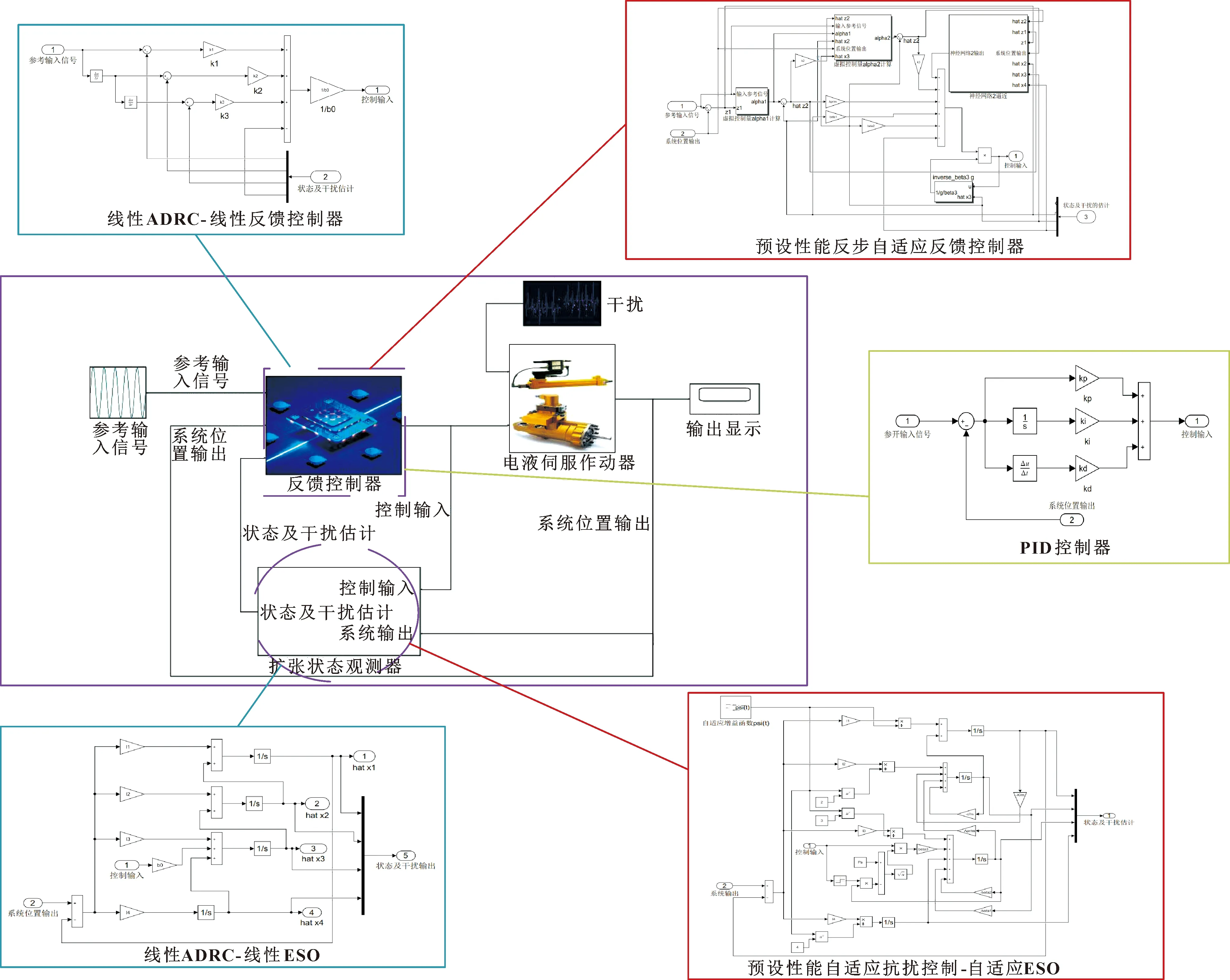
图3 Simulink仿真模块
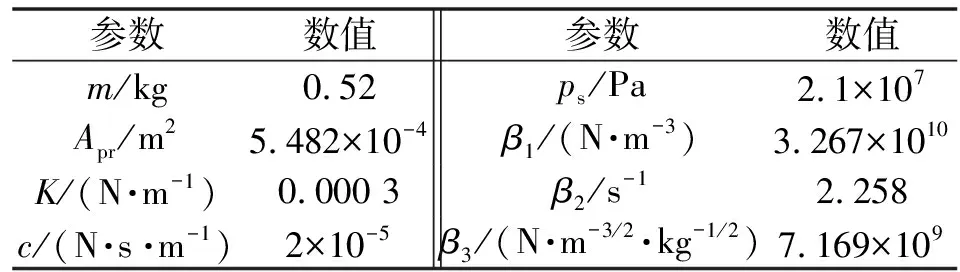
表1 电液伺服系统参数

设置电液伺服系统的期望参考轨迹信号为=5sin(π)mm,设置非匹配摩擦与负载干扰为=300sin(6283)+25sgn(),并在=0的标称条件下进行仿真试验,结果如图4、图5所示。可以看出:在标称情况下,相较于PID和线性自抗扰,文中所提出的预设性能自适应抗扰控制方法显著提升了系统的跟踪性能,具有更小的跟踪误差,并将系统跟踪误差始终限定在预设的时变误差界限范围内。表2所示的跟踪误差均方根(Root Mean Square,RMS)值表明,与PID和线性自抗扰相比,文中所提方法的跟踪误差至少减少了88.2%。
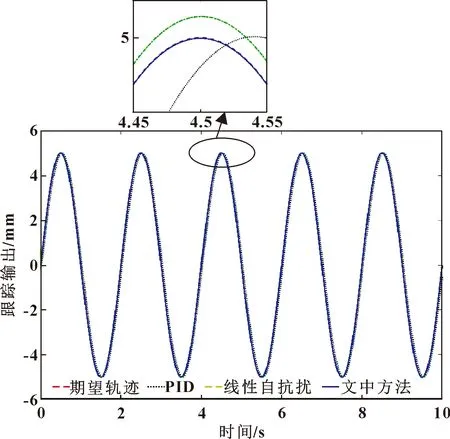
图4 无d2干扰系统跟踪性能对比
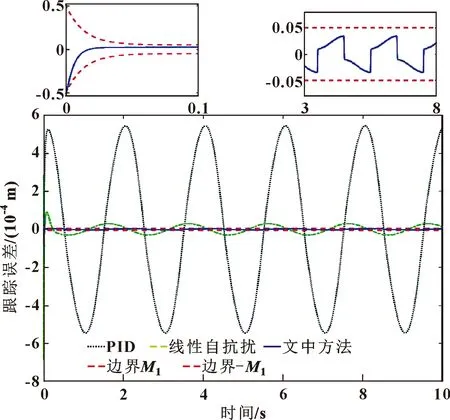
图5 无d2干扰系统跟踪误差对比
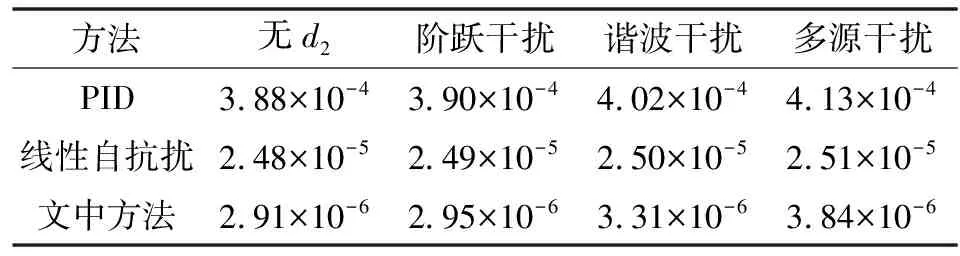
表2 跟踪RMSE性能比较 单位:m
为验证所提出方法的干扰抑制能力,在系统中加入外界干扰,设置为5.5 s时刻加入阶跃干扰,再次进行仿真试验,如图6所示。可知:在=5.5 s加入阶跃干扰后,PID控制器下的系统输出出现了严重的漂移,且恢复时间约为3 s;而线性自抗扰下的输出在系统加入阶跃干扰后,出现振荡,但恢复时间较短,约为0.32 s。相比之下,文中所提方法在面对阶跃干扰时需要的恢复时间更短,且跟踪误差更小,显示出更好的阶跃干扰抑制性能。
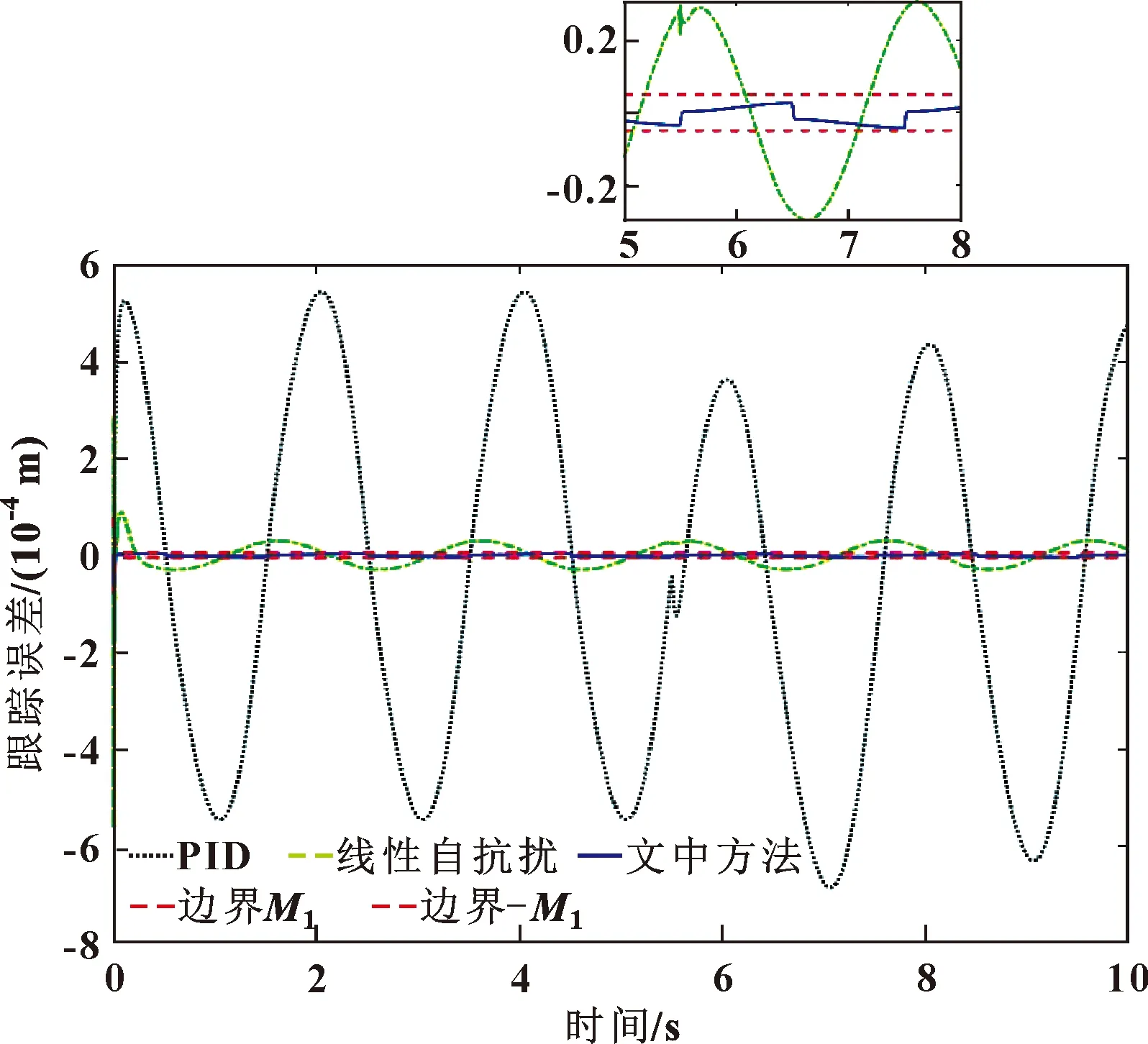
图6 d2为阶跃干扰系统跟踪误差对比
设置为=5.5 s时加入阶跃干扰与频率为2 Hz的正弦谐波干扰,仿真结果如图7所示。由图7和表2可知:面对谐波干扰时,运用PID和线性自抗扰方法的系统输出均出现振荡,而文中方法的系统输出误差仍旧保持在预设时变误差界限内;在跟踪误差的RMS值方面,相较PID和线性自抗扰,文中所提方法约有86.8%的改进。
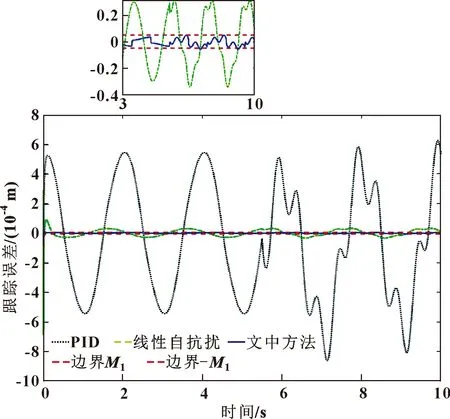
图7 阶跃和谐波干扰系统跟踪误差对比
图8所示为电液伺服系统模型有±20%参数摄动,且在系统中加入阶跃干扰和频率为0.05 Hz的干扰情况下的仿真试验结果。可以发现:在系统面临包括不确定性、摩擦和负载等内外多源扰动时,文中所提方法相较传统PID和线性自抗扰方法具有更好的伺服性能和干扰抑制性能。
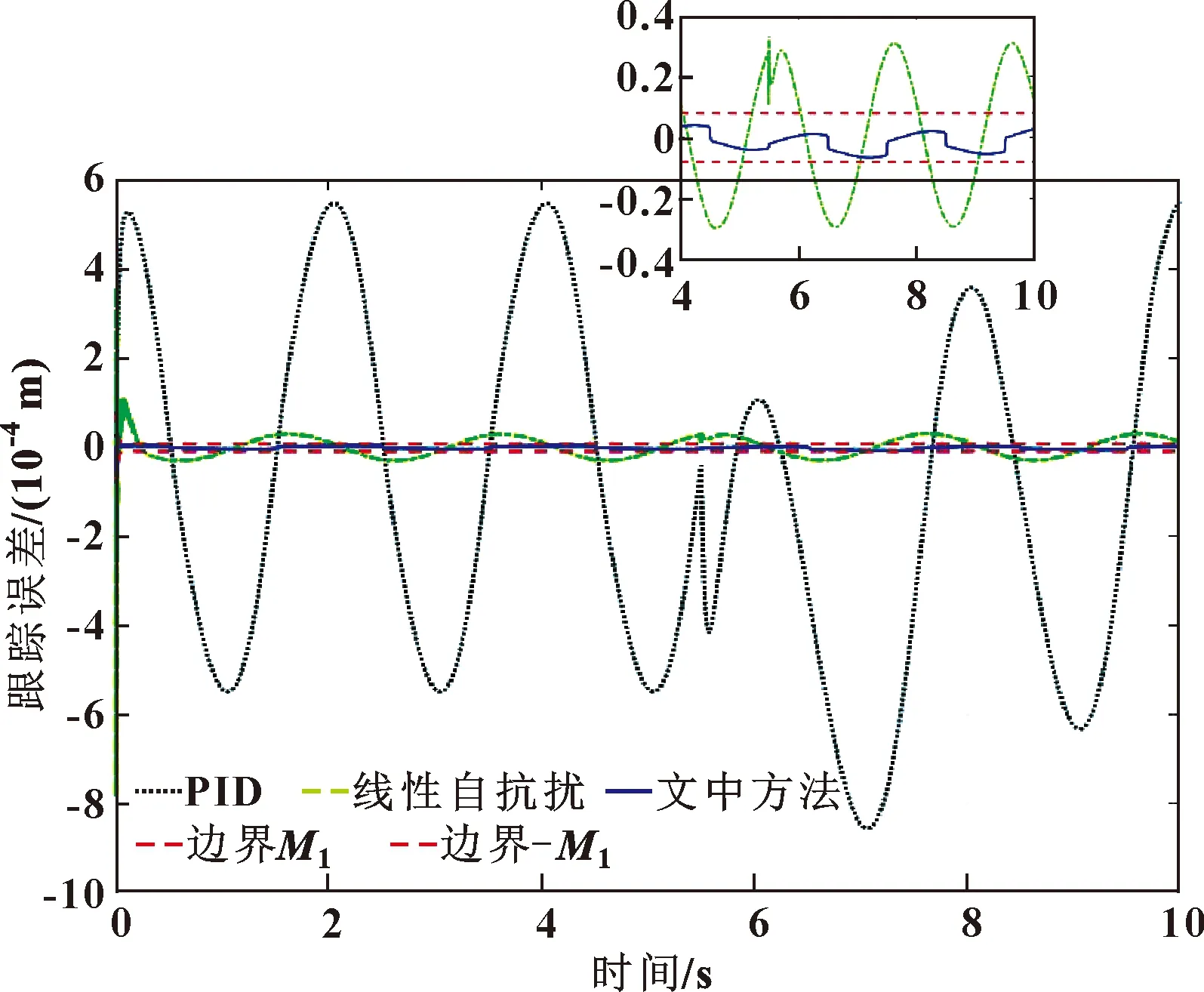
图8 多源干扰不确定系统跟踪误差对比
4 结论
本文作者针对电液伺服系统的多源干扰问题,设计了一种预设性能自适应抗扰控制方法,具体为:
(1)对受扰电液伺服系统设计一种自适应ESO,利用自适应的方式对观测增益进行更新,用以估计系统的状态和干扰;
(2)在外环设计了一种预设性能的反步自适应控制器,利用神经网络逼近观测误差和虚拟控制律的导数,用以补偿干扰并控制系统误差按照预设性能收敛;
(3)通过仿真试验验证了所提控制方法的有效性,在电液伺服控制性能上相较传统的PID和自抗扰方法有显著提升。
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
铁道通信信号(2020年4期)2020-09-21
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
专用汽车(2016年4期)2016-03-01
北京航空航天大学学报(2016年4期)2016-02-27
