
二维伺服系统旋变解码电路设计
2022-09-14 08:20:10吴建刚杨红霞马俊安刘胜魁
电子设计工程 2022年17期
吴建刚,杨红霞,马俊安,刘胜魁
(四川航天电子设备研究所,四川成都 610100)
随着精确制导技术不断发展,导引头技术越来越受到重视[1]。雷达伺服系统是反舰导弹导引头的重要组成部分,它对于发现目标、跟踪目标以及精确测量目标位置都起着重要作用,它的精度直接影响到反舰导弹的制导精度[2-3]。伺服系统的定位精度主要取决于角度传感器的精度,常见的角位置检测传感器有光电编码器、磁编码器以及旋转变压器。相比于其他两种类型的传感器,旋转变压器具有耐污染、抗震动、抗电磁干扰、寿命长,在恶劣环境下可靠工作的优点[4-6]。
由于旋转变压器直接输出的是模拟电压信号,需要经过模数转换及解码变为数字信号才能被处理器使用,所以,对于采用旋转变压器作为测角元件的伺服系统,模数转换解码电路和旋转变压器共同决定系统的定位精度。旋变解码又称为轴角解码,主要有两种方法[7-8]:一种是结合硬件调理电路,利用处理器运行轴角转换计算轴角;另外一种是直接使用轴角数字转换芯片(RDC)。RDC 芯片精度较高、外围电路简单,广泛应用于现代雷达伺服测角系统。目前,应用于雷达导引头伺服系统的旋变解码电路普遍基于集成的RDC 芯片(AD2S1210),而该芯片驱动能力很小,微安级的驱动电流无法直接驱动旋转变压器工作,所以,对于RDC 芯片(AD2S1210)解码电路,后端的驱动电路设计非常关键。刘伟奇等设计了基于AD2S83、AD2S99、OP279 和甲乙类放大电路组合的激磁放大电路,电路非常复杂[9];范涛等设计了高密度主控板,但侧重于软件解码设计,并未给出高密度RDC 设计电路[10];郭晨霞等研究了低成本激磁电路,但主要采用分立器件来搭建[11];魏旭来选用AD823ARZ 和TCA0372 构成射随缓冲,其驱动电流可达1 A,但电路设计复杂[12];文献[13-20]研究较多的解码驱动电路主要为分立器件组成的多级推勉放大电路,其电路复杂、规模较大,均不利于二维伺服系统的工程应用;文献[21-23]采用集成运放驱动电路,但仅针对单轴设计;魏雅设计了双轴解码驱动电路,但仍采用分立器件搭建[24]。因此,该文设计开发了一款适用于小型雷达导引头二维伺服系统的集成化共激磁放大电路。
1 旋转变压器测角原理
旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转角成正弦、余弦函数关系或线性关系。
工程上应用较多的是正余弦旋转变压器,其等效原理结构如图1 所示,左侧初级励磁绕组输入励磁电压,右侧次级感应绕组反馈输出两相正交的电压,大小与转角成正余弦关系,故可以通过反馈正余弦电压信号计算出其转子位置数据。
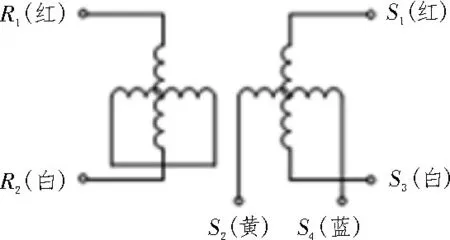
图1 旋转变压器等效原理结构图
其电压换算关系为:
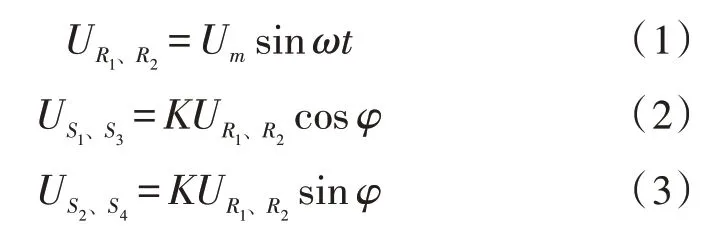
式中,Um为最大激磁电压幅值;ω为激磁频率;K为变比;φ为转角;
由于旋转变压器(以下简称旋变)直接输出的是模拟电压信号,所以,需要经过模数转换及解码变为数字信号供处理器使用,信号转换原理框图如图2所示。
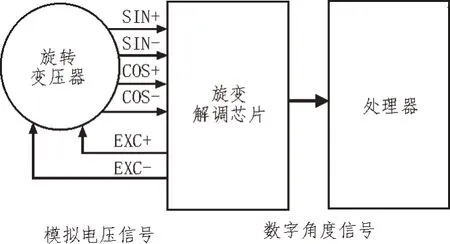
图2 信号转换原理框图
2 电路设计
2.1 RDC解码芯片
AD 公司的AD2S1210 是一款高精度的集成RDC芯片,能够为旋变提供所需的激磁信号。内部有一个伺服跟踪环路,负责跟踪输入的正、余弦信号,并转换为数字的位置。该芯片广泛应用于直流和交流伺服电机控制领域。AD2S1210 的主要参数见表1。
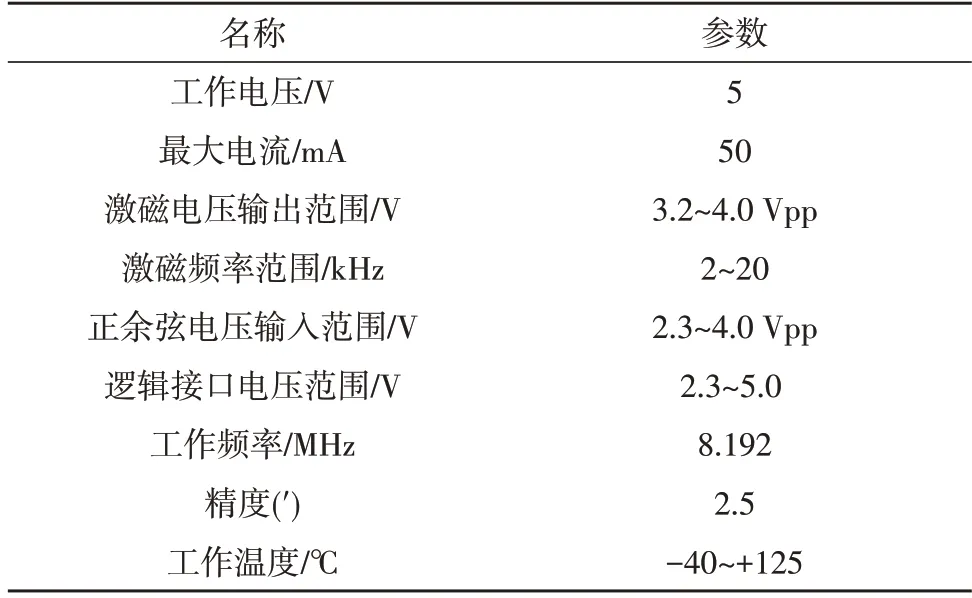
表1 AD2S1210主要参数
2.2 AD2S1210接口电路
AD2S1210 是模数混合芯片,芯片工作时需要模拟AVDD+5 V、数字DVDD+5 V 以及逻辑数字+3.3 V三路电源供电。AD2S1210 芯片模拟端用于产生驱动旋变工作的激磁信号,同时接收旋变返回的正余弦信号,数字端与处理芯片FPGA 互连,FPGA 对其专用管脚进行配置操作,设置芯片的工作模式和激磁电压频率等,并接收其输出的角度解码数据。AD2S1210 具有串行和并行两种通讯方式,为了减少外围走线,该文采用SPI 串行方式。电路设计按照模数混合的电路设计原则进行设计,模数走线采用分开设计,模拟地线与数字地线通过磁珠单点相连。AD2S1210 接口电路原理框图如图3 所示。
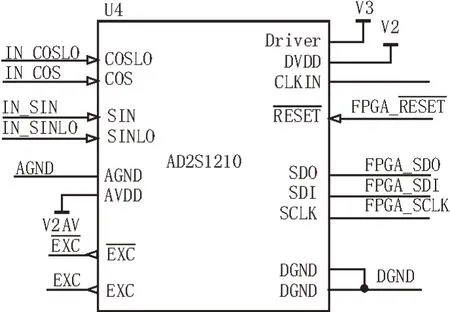
图3 AD2S1210接口电路原理框图
2.3 激磁放大电路
虽然AD2S1210 产生激磁信号和处理正余弦信号非常方便,但该芯片驱动能力很小,微安级的驱动电流无法直接驱动旋变工作,所以,后端的激磁驱动电路设计非常关键,既影响信号的质量,又制约整个旋变解码电路的集成化程度。常见的驱动电路多为分立器件组成的多级推勉驱动电路,电路复杂,可靠性低,已经无法适应微小型二维伺服系统的使用需求。
该文设计开发了一款基于双路轨到轨功率运放FX2546(主要参数见表2)的激磁放大电路,实现了激磁放大电路的集成化。为了尽可能地精简外围电路,减小电源种类,设计时采用单电源供电。为了有效利用运放的最优线性段,实现信号全范围放大,设计时将激励信号参考电平偏置到供电电压的一半附近。激磁放大电路的原理图如图4 所示,AD2S1210 输出的激磁差分EXC 信号分别经过R3和R17连接运放负端,运放正端通过分压电阻将电压配置为一半的供电电压,经放大后的激磁差分EXC_OUT 信号便可驱动旋变工作。工程应用时,还可根据需要灵活配置激磁信号电压的放大倍数,以适应不同电压的旋变使用。
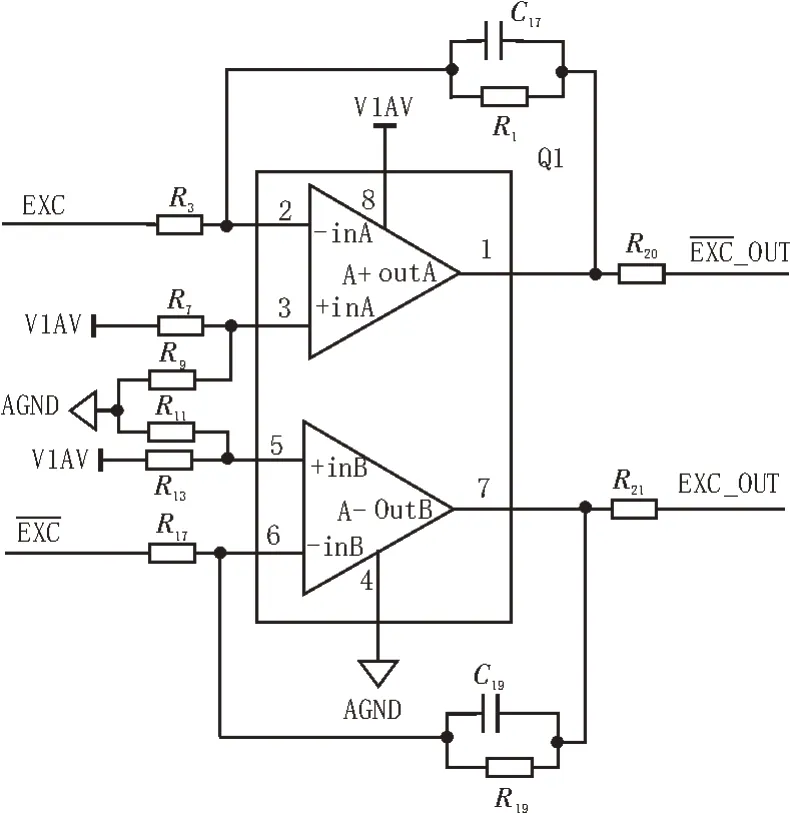
图4 激磁放大电路原理图
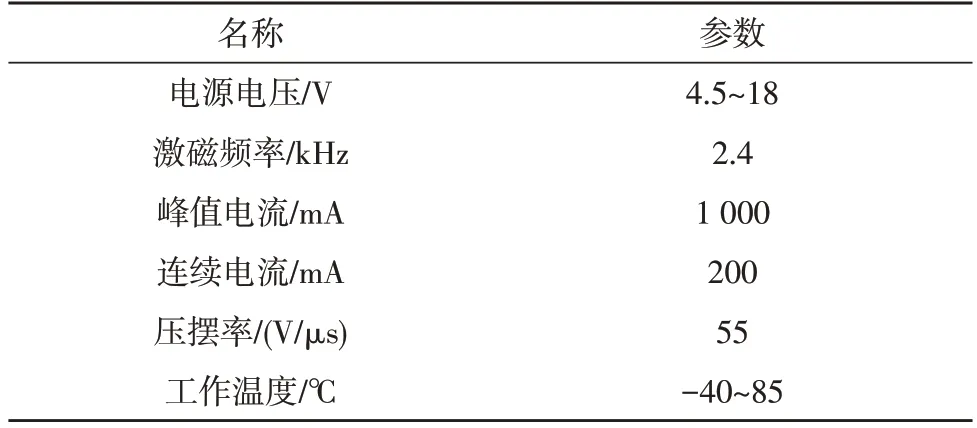
表2 FX2546主要参数
2.4 共激磁解码电路
导引头小型化低成本是未来发展的趋势,如何充分利用已有资源,优化电路结构、实现电路的微小型化设计是工程应用需要重点解决的难题。该文设计的共激磁解码电路可采用一路激磁放大电路同时驱动方位和俯仰两维旋变,与分立器件组成的多级推勉驱动电路相比,元器件数量和电路PCB 面积分别缩小一倍以上,为导引头伺服电路的微小型化设计提供了工程化途径。
共激磁解码电路的原理框图如图5 所示,方位AD2S1210 输出的激磁信号经激磁放大电路放大后同时驱动方位和俯仰两个旋变工作,旋变输出的正余弦信号分别输入各自的AD2S1210 解码芯片。由FPGA 对解码芯片进行配置,并通过SPI 串口接收解码后的角度数据。为保证共激磁设计时两维激磁信号相位的一致性,由FPGA 进行时序控制确保两维解码芯片同步复位,采用同源晶振经时钟驱动芯片后供两维解码芯片使用。
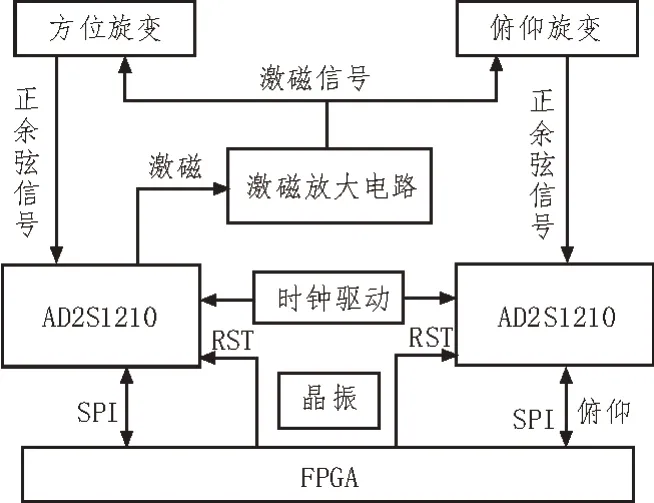
图5 共激磁解码电路原理图
3 试验测试
3.1 测试系统
对设计完成的产品进行了实物测试,搭建的测试系统(如图6)由上位机、集成控制驱动器(包括控制电路、角度解码电路和电机驱动电路)以及执行机构组成[25]。所选旋变型号及主要参数如表3 所示。
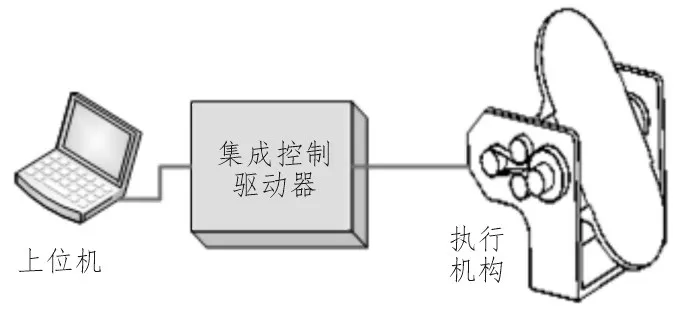
图6 测试系统
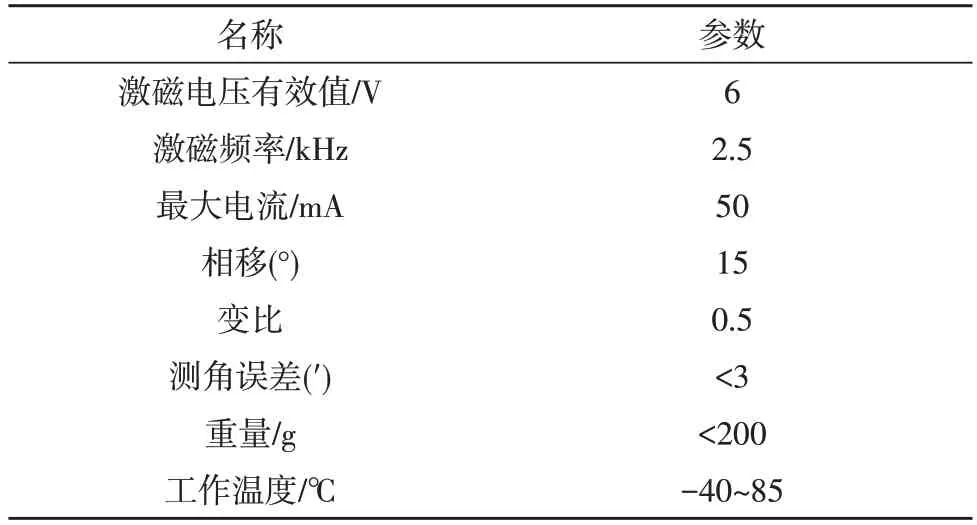
表3 J45XF20旋变主要参数
3.2 波形测试
该文设计的共激磁旋变解码电路使用的是方位维AD2S1210 输出的激磁差分信号,经激磁放大后同时驱动方位维和俯仰维两路旋变,然后将旋变输出的正余弦信号输入各路AD2S1210 进行解码。对于俯仰维测角而言,如果两维AD2S1210 分别产生的激磁信号相位一致性较差,则会影响俯仰维旋变角度解码的正确性。所以,需要对方位维和俯仰维AD2S1210分别产生的激磁信号相位进行测试,测试结果如图7所示,方位维和俯仰维激磁波形基本重合,相位差在10°以内,符合AD2S1210 手册44°以内的相位差要求,激磁信号输出波形符合设计预期。
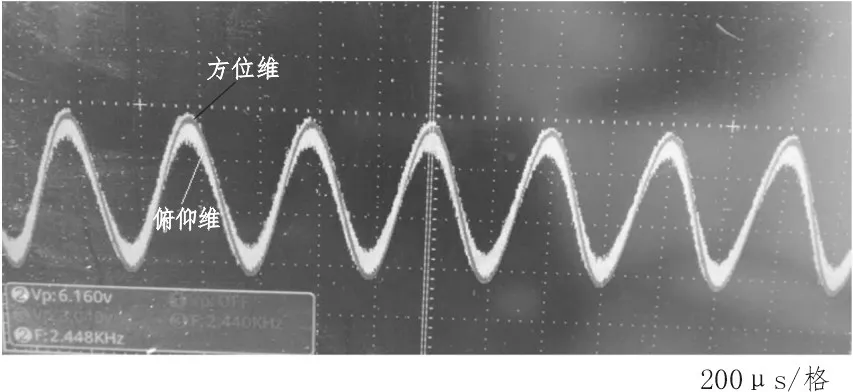
图7 方位维和俯仰维AD2S1210产生的激磁信号波形
3.3 系统测试
旋转变压器解码电路属于模数混合电路,电路设计裕度是否够用,通常可通过温度循环测试进行考核。在常温系统测试的基础上,将被测产品放入高低温循环试验箱中,按要求完成了温循试验(-40~+60 ℃)。在常温、低温和高温测试过程中,系统各流程正常工作,预置角度流程数据截图分别见图8-10,在角度预置过程中角度输出连续平滑无畸点,预置到位后,角度平稳无波动。
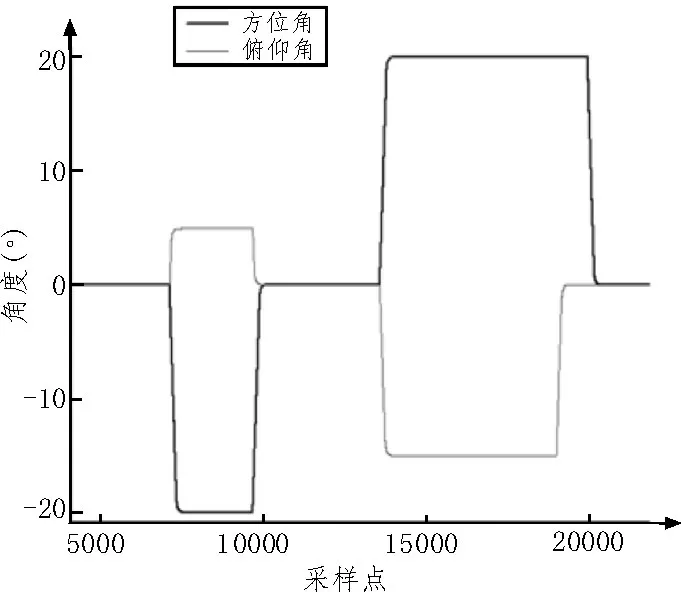
图8 常温预置角度数据截图
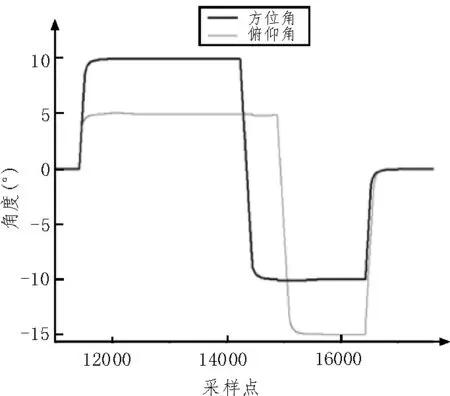
图9 低温预置角度数据截图
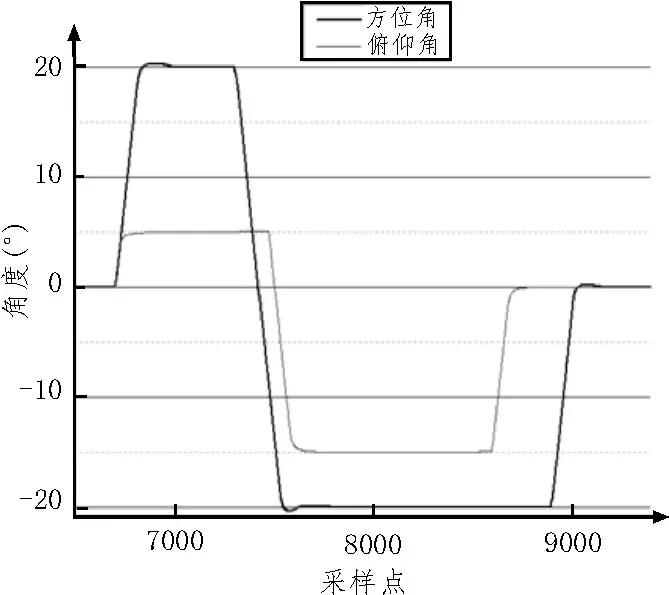
图10 高温预置角度数据截图
测试数据表明,设计完成的共激磁旋变解码电路及伺服系统工作稳定可靠,适用于导引头伺服系统工作环境。
4 结束语
文中设计开发的二维伺服系统旋转变压器解码电路,集成化程度高,适应了弹载雷达导引头小型化低成本的发展需求。文中介绍了集成化激磁电路和适用于二维伺服系统的共激磁放大电路设计。通过温循试验,验证了该电路的可靠性和稳定性,实现了集成化和小型化二维伺服系统旋变解码电路的工程化设计。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
防爆电机(2022年3期)2022-06-17 01:40:58
防爆电机(2022年2期)2022-04-26 13:57:02
中国电气工程学报(2019年21期)2019-10-21 17:12:09
电子制作(2019年16期)2019-09-27 09:34:58
电子制作(2019年23期)2019-02-23 13:21:36
测控技术(2018年12期)2018-11-25 09:37:44
苏州市职业大学学报(2018年4期)2018-11-02 07:18:18
电源技术(2016年2期)2016-02-27 09:05:13
北京航空航天大学学报(2016年4期)2016-02-27 06:32:11
