X波段FMCW雷达系统设计方法探究
2022-09-09 03:05刘心成薛东海刘涛庆
中国电子科学研究院学报 2022年6期
刘心成, 薛东海, 刘涛庆
(中国电子科技集团公司第二十七研究所,河南 郑州 450045)
0 引 言
在近程探测领域,调频连续波(FMCW)雷达备受关注。FMCW雷达系统结构简单、成本低、易于小型化,非常适合应用于小型低成本的近程目标探测中,目前广泛应用于区域警戒、安防和无人驾驶等领域。
典型的FMCW雷达系统结构如图1所示[1]。雷达工作时频率综合器产生的调频连续波,一部分经发射天线发射出去,另一部分经耦合器与接收天线回波进行混频,产生包含目标信息的回波差频信号,对回波差频信号采样后做2维快速傅里叶变换(FFT)处理解算出目标的距离和速度信息,对多通道回波信号进行比相或者数字波束形成(DBF)就能解算出目标的角度信息。
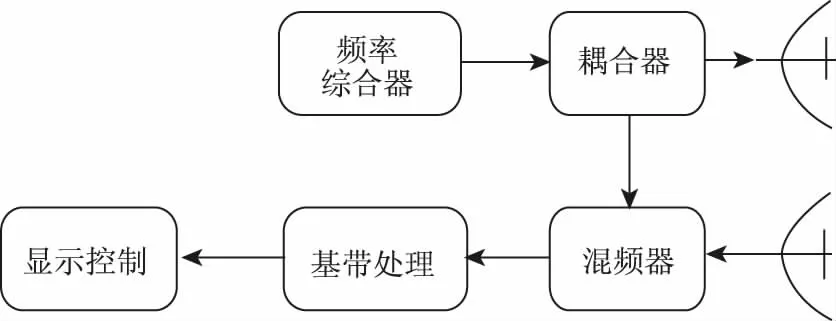
图1 典型的FMCW雷达结构
当前对FMCW雷达的研究主要集中在三个方面[2-3]。
1)工作频段越来越高。由于毫米波的高频率相对低频段更易实现大带宽,因此,也更容易实现对目标的高精度测量和超高分辨率成像。且由于毫米波雷达天线尺寸较小,系统更容易小型化,因此对毫米波段的研究逐渐成为主流。当前国内外研制的主流频段集中在 24 GHz、35 GHz、76 GHz~81 GHz等频段。对于 FMCW 雷达来说,频率扫描带宽决定了探测目标的距离分辨率,因此,单就距离分辨率而言77 GHz比24 GHz雷达有了十多倍的提升,应用范围更加广泛。
2)单片雷达传感器日益成为了主流。随着单片微波集成电路(MMIC)技术的发展和互补金属氧化物半导体(CMOS)工艺水平的成熟,商用的单片毫米波雷达传感器日益成熟。目前,市面上有多型24 GHz和77 GHZ单片微波雷达传感器比较成熟,这些雷达传感器都是高集成度的“射频收发前端”或者“射频收发前端+基带处理器”的单芯片MMIC架构,设计者只需要搭配微带阵列天线和简单的外围电路就能搭建起功能完整的FMCW雷达系统,从而大大缩短了产品设计周期。
3)对FMCW雷达系统的开发日益集中在应用算法和应用场景上。由于可以很方便地搭建起雷达系统,设计师就可以将主要工作精力集中在调制波形发生、信号处理算法研发和新应用场景的构建,在实际应用中根据测量精度、量程、实时性、稳定性等指标对硬件前端、信号处理后端及距离测量算法等进行调整及优化。
如前所述,当前FMCW雷达系统多采用“PCB微带天线+单片射频收发MMIC+基带处理”或“PCB微带天线+单片毫米波雷达传感器MMIC”的架构,但这些MMIC多集中在毫米波频段,而在X波段集成度如此高的MMIC却几乎没有。基于实际工程需求,本文详细探讨了FMCW雷达系统的设计方法,并研发了一款X波段FMCW雷达系统。
1 系统方案设计
雷达系统设计的基本流程[4]是:首先,分析应用需求,搭建合适的系统架构;然后,根据系统指标计算出雷达工作参数,进行雷达各子模块软硬件设计和调试;最后,试验并验证指标。
1.1 需求分析
近距离探测雷达探测距离在500 m以内,宜采用FMCW体制;雷达尺寸小,天线剖面较低,应采用微带天线形式。
系统要求检测运动目标,但由于探测的动目标数量较少,因此可按动目标为稀疏分布的工作场景设计。
系统要求实现方位上大范围探测,测角方案可选择干涉仪体制[5]或数字多波束(DBF)体制。干涉仪测角雷达对多目标的分辨能力有所不足,但能较精确地测角,适用于目标稀疏分布的场合。DBF体制雷达对多目标的分辨能力强,更适用于目标数量众多的应用环境。
综合以上应用需求,再充分考虑探测精度、成本控制和小型化等因素后,选择“FMCW+干涉仪测角”体制。
1.2 系统方案选择
FMCW雷达系统主要由收发天线、收发射频前端、回波处理和显示控制等组成,雷达系统总体设计框图如图2所示。
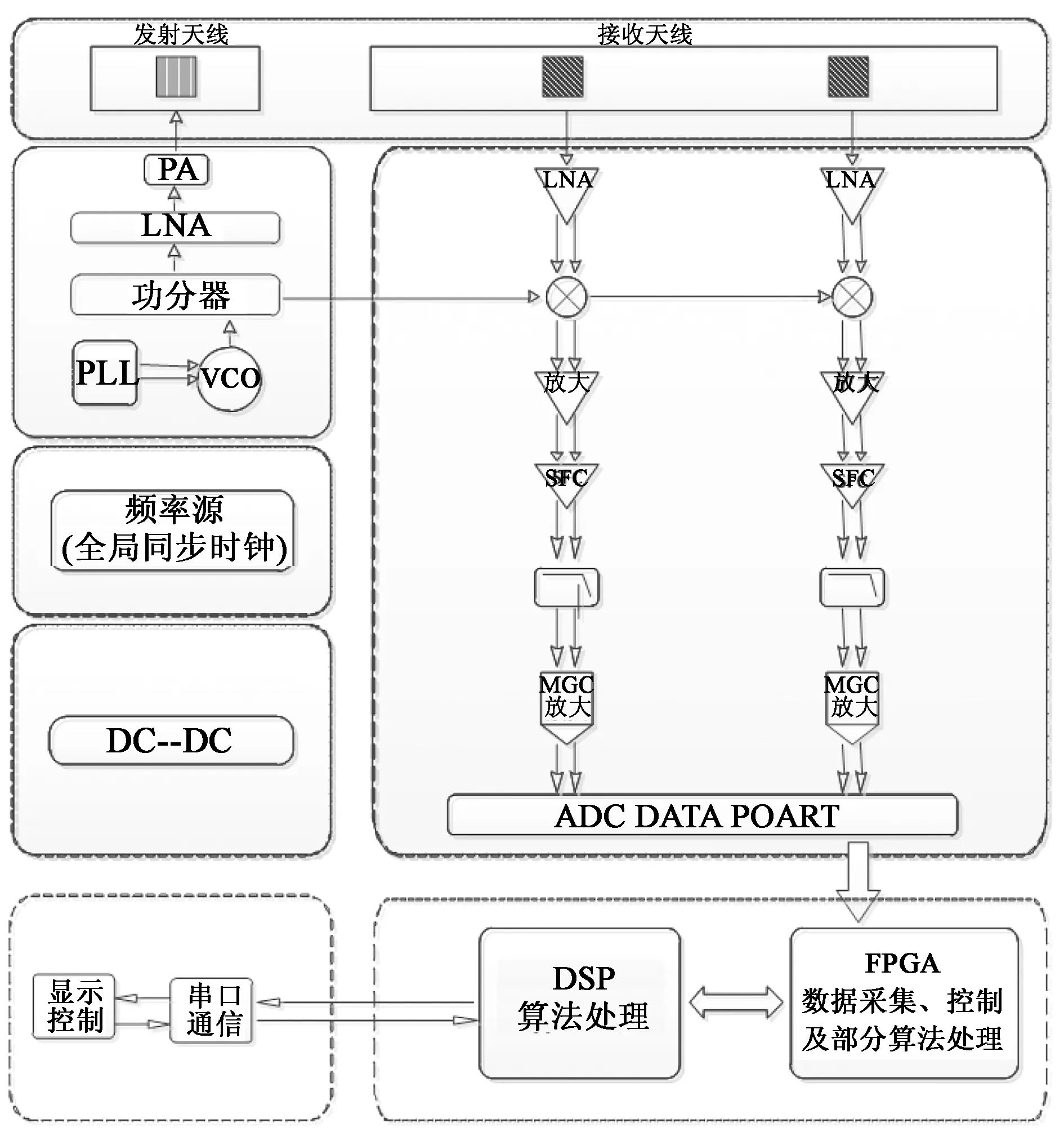
图2 FMCW雷达系统总体设计框图
雷达工作于X波段,采用单通道宽波束发射天线凝视实现免扫描探测区域全覆盖,采用FMCW波形减小峰值发射功率,采用MTI和MTD技术实现杂波下动目标检测,采用两通道天线同时接收并进行大视角目标探测。
1.2.1 天线选择
连续波雷达比脉冲雷达具有更强的近距离目标检测能力,但连续波雷达在发射全打开状态下,其接收机容易受发射信号泄漏的影响,为减小该影响,提高隔离度,系统采用收发分离的天线结构。收发天线的波束方向图和电轴应保持一致。
雷达天线采用微带阵列天线,尽可能设计低副瓣方向图以减小地杂波的干扰。雷达天线在同一个基板上设计、一次性加工成型,保持机械、电轴的一致性;方向图对称排列减小近地干扰。从雷达应用角度考虑,采用超薄形微带构建天线阵列以及一体化设计的功分馈电网络,降低天线的整体重量,并尽量减小加工安装的误差。
1.2.2 收发射频前端选择
雷达收发前端负责射频信号调制、发射与接收以及对接收信号进行解调。
本雷达工作在X波段,由于工作频段及信号带宽限制,以及考虑到简化设计和目前主流模数混合器件性能指标,拟采用集成电压控制振荡器的锁相环(PLL+VCO)来实现收发方案,以减小设备体积和重量,简化设计。整个通道由PLL+VCO、二倍频、发射通道切换开关、集成驱动功放、末级功放及滤波器组成。
雷达接收机完成回波信号的放大(LNA、射频放大、中频放大)、频率变换(下变频)、滤波处理等。
接收机采用零中频接收机方式,其中混频器采用一次下混频产生中频。接收机采用零中频架构。零中频架构最大的缺点是发射信号的泄露对混频输出影响很大,在进行采样之前一定要进行信号调理[6]。
信号调理主要实现对差频回波的放大和滤波。接收机混频器输出的基带信号功率很小,故需高增益的放大;为了得到远近距离上一致的回波大小,抑制近距离地物杂波干扰,需进行特性衰减。同时对超出设计量程的回波频率进行滤波(一般是高通滤波)。
1.2.3 回波处理选择
回波差频信号经过数字化采样后运用数字处理手段进行信号和数据处理,解算出目标信息。考虑到系统扩展的需要,确定采用“双通道A/D+FPGA+DSP”处理架构[7],由单块信号处理板实现功能。
FMCW雷达对目标信息的解算主要是进行 FFT运算。为了提高数据处理效率和系统灵活控制功能,FPGA实现回波的同步采集、距离的并行解算以及数据通信、系统控制等功能,DSP实现速度解析、方位解算、点迹凝聚和目标跟踪等功能。
1.3 主要工作参数选择
雷达系统典型指标包括威力范围、分辨率及精度等,为了由雷达系统指标得到雷达工作参数,需要了解一些雷达的计算公式和方法[8-9]。
1.3.1 威力范围
雷达威力范围是雷达在距离、速度和角度上探测的范围。
雷达最大作用距离与发射功率、天线增益、目标雷达散射截面积(RCS)、接收机噪声系数等密切相关,理论值可由雷达方程计算得到,理论最小作用距离为0,实际值与回波信噪比有关。
雷达最大探测速度由调频周期Tc和工作波长λ决定。
在不机扫的情况下,雷达角度探测范围由天线阵元间隔d和工作波长λ决定。
雷达速度和角度理论威力范围可以由式(1)计算得到。
(1)
1.3.2 分辨率
雷达分辨率指距离、速度和角度分辨率,是对雷达分辨多目标能力的度量。距离分辨率由调频带宽B决定;速度分辨率由积累脉冲数N和调频周期Tc决定;角度分辨率取决于波束宽度,角度分辨率与阵元数M、阵元间距和角度余弦值成反比,与工作波长成正比。
雷达理论分辨率可以由式(2)估算。
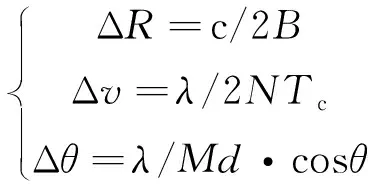
(2)
1.3.3 信号波形
系统采用锯齿调频连续波实现测距和测速功能,设计参数涉及调制周期和带宽。
在FMCW雷达中,信号调频的线性度是重要的指标。为了保证雷达性能,回波处理要选择线性度好的中间段,为此可在调制周期中为信号波形的起始和末尾添加一定的过度时间,一般工程可实现的过渡时间可以取3 μs~5 μs。
雷达距离分辨率决定了信号的理论调制带宽,工程设计中考虑到非理想点目标、加窗处理展宽和目标刚好相近时的展宽效应等影响,一般取理论带宽的1.5~2倍。
1.3.4 其他参数
雷达A/D采样速率由最大差频频率决定,一般至少取2倍以上。
雷达最大差频与最远探测距离Rmax和调频斜率B/Tc有关,由式(3)可以估算。
fIFmax=2Rmax(B/Tc)/c
(3)
以表1所示雷达指标为例,雷达系统工作参数设计如下:实现5 m距离分辨,理论发射带宽为30 MHz,考虑到展宽效应,实际取50 MHz;实现速度40 m/s的无模糊探测,锯齿波有效调制周期为194 μs,考虑锯齿波起始和末尾的过渡时间,调制周期取200 μs;最大探测距离300 m,对应最大回波差频0.621 8 MHz,采样率取2.5 MHz;采用微带两阵元天线实现凝视探测,阵元间距为半波长,可以实现±90°探测;实现0.5 m/s的速度分辨,至少相参积累155个周期,取256点积累周期。
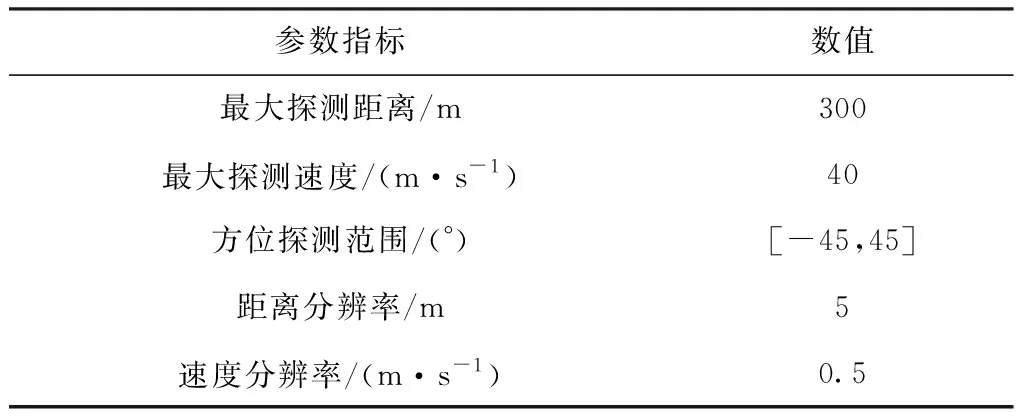
表1 雷达部分指标实例
发射机输出1 W功率,发射天线增益9 dBi,接收天线增益13 dBi,接收噪声系数5 dB,目标检测信噪比13 dB,系统总损耗8 dB,可以计算目标最大作用距离为384 m,满足雷达最远探测距离要求。
1.4 系统软件流程设计
系统软件包括回波处理、目标信息显示和系统控制。难点是回波处理算法设计和实现,包括信号处理和数据处理两部分,实现对回波差频信号的距离、速度、方位角等解算,以及形成航迹、跟踪目标的功能。
1.4.1 系统工作流程
系统工作时,由频率源产生整机时钟信号,其中PLL时钟、VCO时钟、AD采样时钟通过时钟分配网络送至各个子部件。发射组件中的PLL+VCO产生FMCW信号,此FMCW信号倍频后经放大器输出发射激励信号,激励信号经开关馈送至发射通道,经功率放大后由天线辐射到警戒区域。目标反射回波经接收天线进入2通道接收机,并经过LNA场放、混频、滤波后生成差频信号,经A/D采样后送入FPGA进行滤波、杂波对消和距离解算等处理,并通过数据总线接口送至多核DSP完成速度FFT、CRAR、目标检测、角度测量、点迹凝聚、目标跟踪等处理,最终目标信息通过RS485打包上传至计算机用作显示和数据采集。系统工作流程如图3所示。
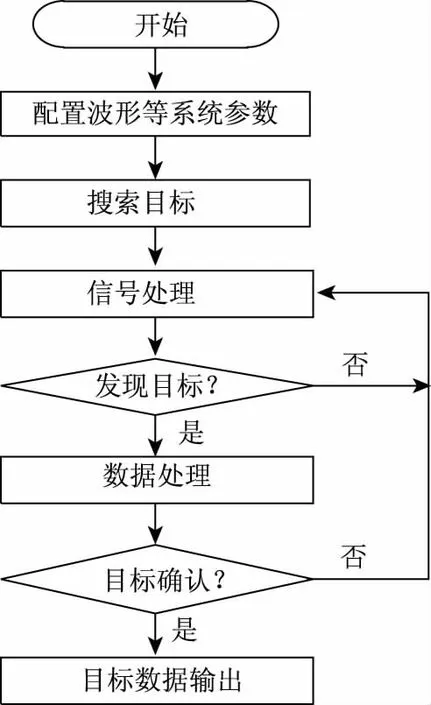
图3 系统工作流程
1.4.2 信号处理流程
雷达信号处理的基本任务是运用信号处理的手段,抑制杂波,解算出目标的距离、速度和角度信息,形成目标点迹数据以便后期的数据处理,信号处理流程[10-11]如图4所示。
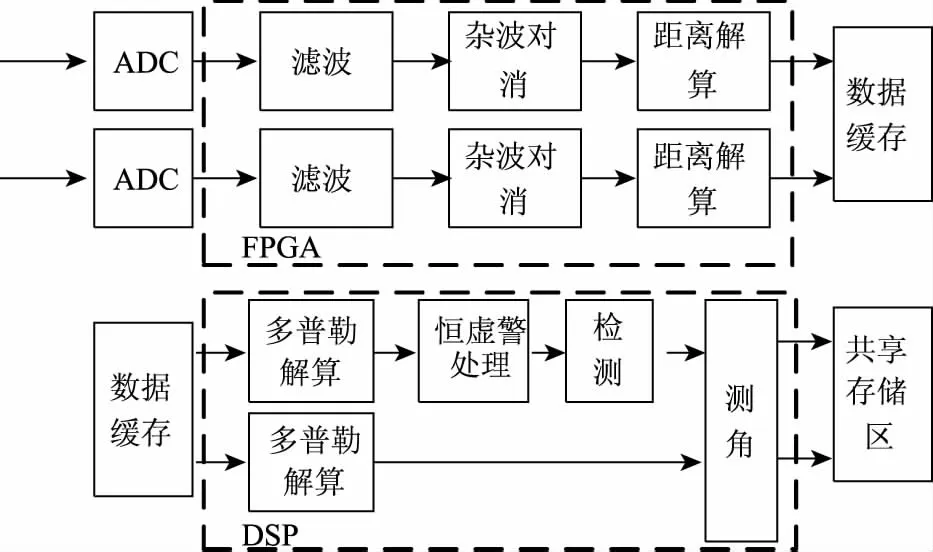
图4 信号处理流程
信号处理的实现包括回波数据采集和数字信号处理两部分,由两路A/D实现对两通道回波的同步采集,由数字信号处理器实现对回波的实时处理。
信号处理算法采用DSP+FPGA的架构。对实时性要求比较高的杂波对消和距离解算由FPGA实现;对处理速度要求较低的多普勒解算、恒虚警处理、检测和测角等算法由DSP实现。该处理流程充分考虑DSP和FPGA各自的特点:DSP处理灵活,但速度较低;FPGA处理速度快,可并行处理,更适合数据量大和实时性要求比较高的场合。
1.4.3 数据处理流程
雷达数据处理的基本任务是将检测后的目标点迹数据处理成用户可使用的目标信息[12-13]。首先,对信号处理解算出的目标距离、方位和速度等点迹信息,进行有效的点迹凝聚;然后,去除虚警和杂波,正确起始目标航迹;接着,对目标进行点迹关联和航迹关联,跟踪滤波,实现对目标的检测与跟踪。
数据处理主要包括点迹凝聚和目标路径跟踪。点迹凝聚是将单个目标的多个测量点迹凝聚成一个中心点,输出一组目标点迹数据用于目标路径跟踪。目标路径跟踪是利用多帧测量结果来跟踪目标运动的航迹,主要包括多帧之间的点迹与点迹关联、点迹与航迹之间的关联和目标航迹的滤波和预测等过程。数据处理的基本流程如图5所示,数据处理算法由多核DSP实现。
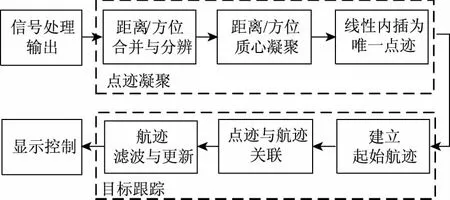
图5 雷达数据处理流程
2 雷达实例与性能检验
基于以上方案设计思路,研制了X波段FMCW雷达系统,图6(a)是雷达实物图,该系统为3发2收,一般工作于1发2收模式,可根据需要工作调整为3发2收模式[14]。图6(b)是射频收发电路实物图。
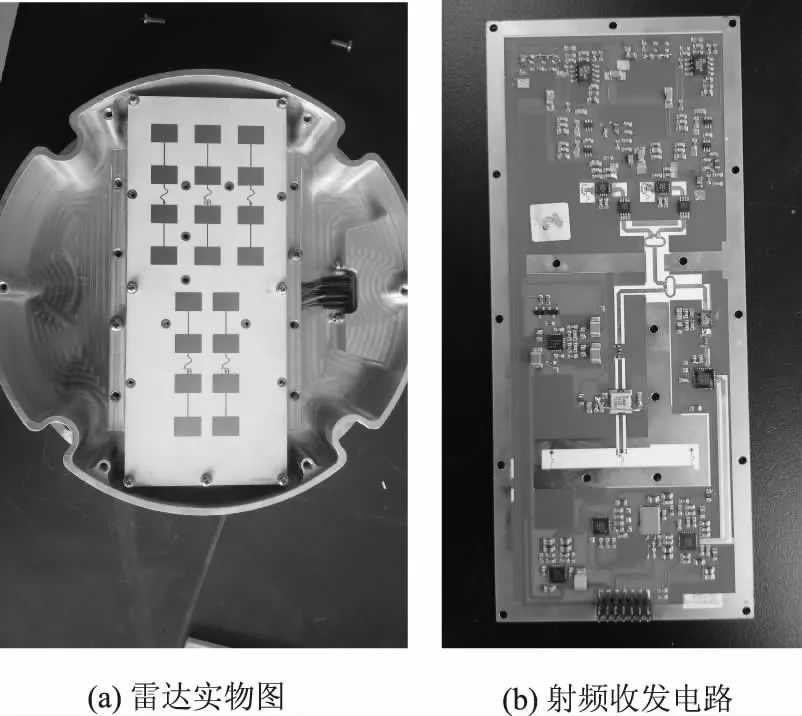
图6 FMCW雷达示意图
可以看出,部分MMIC芯片的使用简化了FMCW雷达系统设计,具有结构简单、易于小型化的特点。
实验条件:在长度大于500 m、平坦、通视、相对笔直的道路上,用方位、俯仰可调节的三脚架架设雷达,雷达天线阵面正对测试道路正前方。
试验方法:挥动角反射器模拟距离固定的目标,驾驶匀速运动汽车模拟速度恒定的目标,调节雷达到指定角度进行目标探测。
图7是单目标运动跟踪结果,目标航迹编号1,当前距离276.8 m,速度17.9 m/s。图8是两目标运动航迹跟踪结果,尽管两个目标运动航迹有交叉,但仍能正确跟踪目标。结果表明雷达功能正常,信号处理和数据处理算法有效。
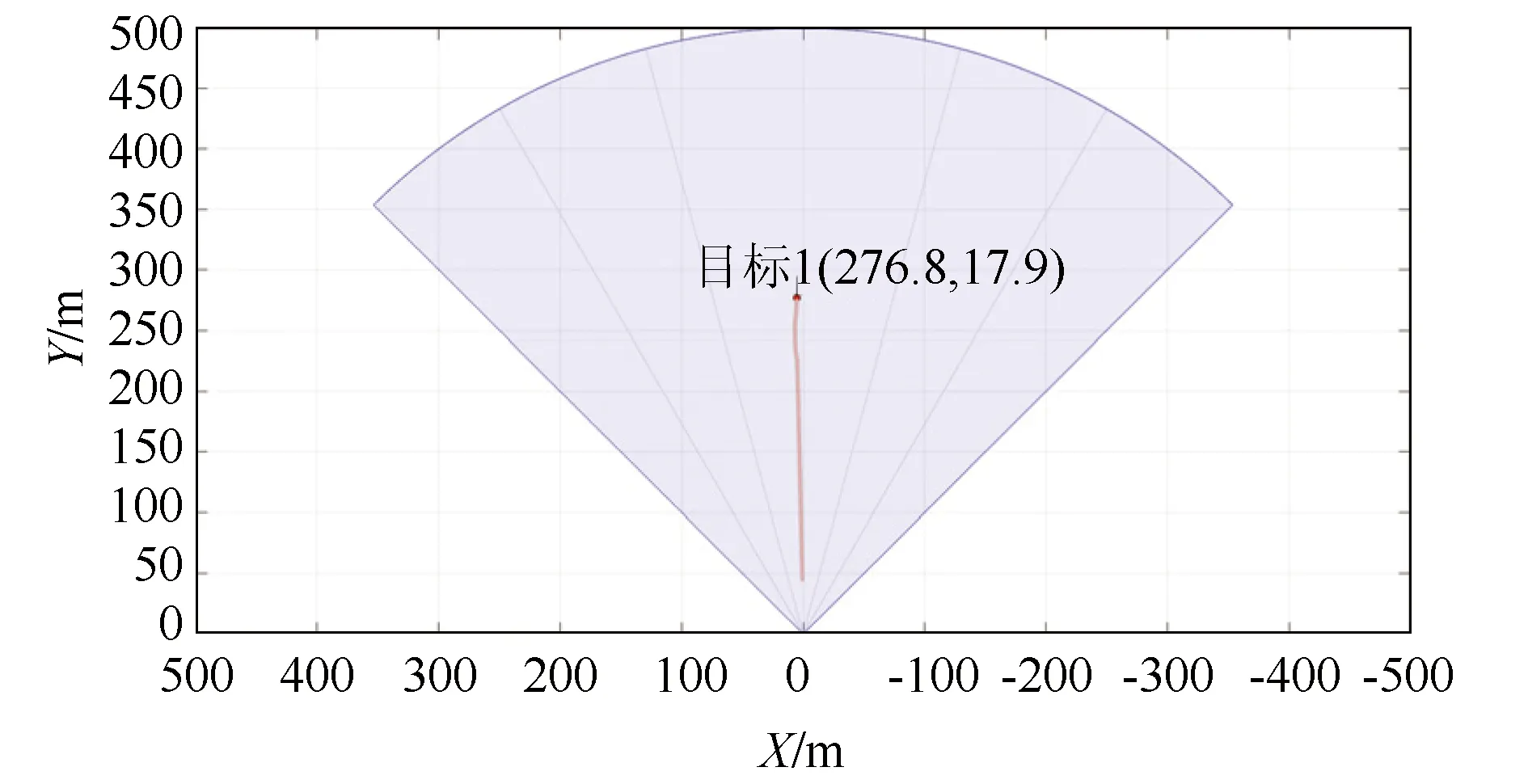
图7 单目标航迹测量结果
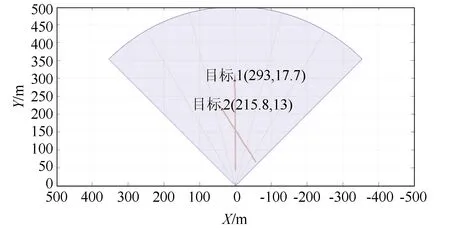
图8 两目标航迹测量结果
雷达综合测量精度结果如表2所示,满足设计要求。
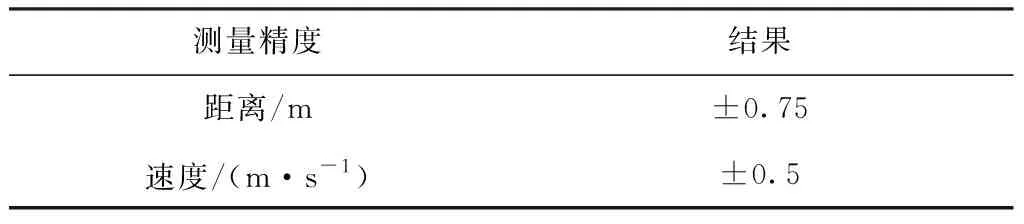
表2 雷达测量精度
试验结果表明,FMCW雷达系统设计方案完全可行,雷达功能正常,系统指标测量结果满足工程应用需求。
3 结 语
雷达系统是一个实时的多功能复杂系统,本文详细探讨了X波段FMCW雷达系统设计的一般原则、思路和方法,以实际工程应用为背景,设计了X波段FMCW测距雷达系统,并进行指标测量。
设计的X波段FMCW雷达系统具有稳定性、实用性、高可靠性和低功耗;部分MMIC芯片大大降低了系统设计复杂度,使得雷达系统体积更小、成本更低。试验结果表明,该方案具有可行性和通用性,系统测量精度高,设计思路可以推广到其他波段FMCW雷达系统中,对于小型FMCW雷达系统设计具有十分重要的参考意义
猜你喜欢
——信号处理
无线电工程(2022年10期)2022-10-24
舰船科学技术(2022年11期)2022-07-15
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
电子制作(2019年14期)2019-08-20
电子制作(2018年17期)2018-09-28
北京航空航天大学学报(2017年7期)2017-11-24
制导与引信(2017年3期)2017-11-02
电子制作(2017年20期)2017-04-26