全自动运行与非全自动运行车辆差异分析
2022-09-08 03:42庄哲,周坤
交通科技与管理 2022年17期
庄 哲,周 坤
(中国铁路设计集团有限公司机械环工院,天津 300308)
0 概述
截至2021 年12 月31 日,中国内地已运营、在建及规划城轨全自动运行线路的城市有北京、上海、深圳、广州、武汉、成都等28 座城市,线路共计85 条,线网规模2 515.77 km,其中已运营线路30 条,运营里程为728.46 km;在建线路46 条,在建里程为1 541.01 km;规划线路9 条,规划里程为246.30 km。
车辆系统作为全自动运行五大核心系统,相比非全自动运行车辆具有更高的自动化程度,可实现全自动唤醒、休眠,自动投入、退出运营,自动折返,自动停站、启动,自动控制车门开闭等功能,实现最佳的运行控制,达到节能环保和高效运行的目的。
分析非全自动车辆与全自动车辆差异,有助于从业人员更好地理解各专业需求,该文就此展开分析。
1 功能差异
功能差异是指全自动车辆在原有部件基础上,自身或与信号等系统加入新的功能,以适应全自动运行要求。
1.1 运行模式
非全自动运行车辆主要采用RM(Restricted Train Operation Mode,限制人工驾驶模式)、CM(Coded Train Operation Mode,列车自动防护模式)、AM(Automatic Train Operation Mode,列车自动驾驶模式)模式运行。
全自动车辆新加FAM(Fully automatic train operating mode,全自动运行模式)及CAM(Creep automatic mode,蠕动模式)驾驶模式,FAM 模式下无需司机进行发车确认操作和瞭望列车运行前方的轨道情况,由系统实现全自动列车驾驶。CAM 是在当车辆通信故障不能进行全自动驾驶列车运行时,由控制中心行车调度员人工远程确认通信正常、列车其他设备正常,并通过调度员遥控启动列车,以限制速度(如不超过20 km/h)运行的驾驶模式[1]。
新加运行模式可让全自动运行车辆完成无司乘人员操作下的自动发车、正线运行、车场运行、回库停车等操作。
1.2 唤醒、自检与休眠
非全自动车辆由司机负责进行列车上电、激活、车门等系统自检及断电操作。
全自动车辆新增车辆唤醒、自检与休眠功能,由列车自动完成低压上电/休眠,列车设备自检/整车延时断电、静调测试、动态测试、自动换端测试/休眠状态测试等操作。
1.3 站台停车对位
非全自动车辆由司机或自动控制精确停车,如果车辆未在站台实现精确停车,则由司机实施人工对标停车,车辆停稳后由司机或自动开关车门,人工驾驶列车或按压ATO 按钮自动出站。
全自动车辆自动控制列车精确停车,未精确停车时车辆与信号系统配合,采用跳跃方式对标停车,直至车门与站台门对位,接着车辆自动打开车门,站停结束后自动关闭车门,条件满足后,列车自动运行出站。
1.4 车门与站台门对位隔离功能
非全自动车辆车门出现故障时,需人工处理相应车门及站台门的对位隔离。
全自动车辆个别车门开关故障时,车辆可关闭并锁定故障车门,向信号系统报告故障车门位置,由站台门系统电气隔离对应站台门,使其在该列车停站时不动作;个别站台门故障时,系统可关闭并锁定故障站台门,向信号系统报告被锁定站台门位置,由信号系统将故障站台门的位置发送给列车,列车隔离对应的车门,使其在该站停站时不动作。车门与站台门故障隔离时,车辆应触发车门故障信息广播向乘客播报相关信息。
1.5 车辆关键系统远程控制功能
非全自动车辆人工设置空调、照明、雨刮器、电热玻璃、受电弓等系统的运行模式,人工启动/关闭这些系统。
全自动车辆由于没有司机操作,因此需根据工况自动控制空调、照明等系统的运行模式、启停,还可以由控制中心远程控制,温度、亮度自适应调节。
1.6 车辆关键系统故障处理
车辆低压逻辑电路、牵引辅助系统、制动系统、蓄电池系统应加强自身状态显示、自检、故障诊断与自恢复、冗余、旁路等功能[2]。当车辆关键系统发生故障时,TCMS 处置相关故障信息且上传到控制中心;控制中心远程人工处理车辆远程复位、远程旁路;控制中心远程人工确认车辆降级运行。该技术需要全自动车辆采用复位机构来模拟人工复位断路器的动作,在检测到断路器跳闸后尝试再次投入[3]。
1.7 车辆异常事件联动处理
非全自动车辆司机的职责之一便是在车辆出现异常事件时,对车辆或乘客预计及时准确地干预。
全自动车辆没有司乘人员,因此车辆与控制中心的联动及远程处理功能需求尤为迫切。当车辆发生乘客紧急对讲请求、车门紧急解锁、车门状态丢失、车门检测到障碍物、逃生门盖板被打开、司机操作台盖板被打开、电气柜门被打开、灭火器被移动、感烟或温烟组合探测器检测到火灾等情况时,车载CCTV、PIS 系统立刻启动联动功能,TCMS 处置事件信息且由车地无线通信传输通道上传到控制中心,同时系统自动处理或由控制中心远程人工处理,并向乘客广播[4]。当发生火灾时,车辆空调和通风系统也将参与联动,进行运转调整及开启,避免烟雾扩散。
2 配置差异
全自动车辆为满足在无人工操作的情况下实现车辆唤醒、自检、出库、正线运行、回库、休眠等功能,其走行部、受电弓(受流器)、司机室等系统在原设计基础上需新增部分设备,以实现安全监测、无人值守、可靠性及安全性升级等需求。
2.1 障碍物检测系统
非全自动车辆依靠司机自主判断轨道障碍物并采取制动或其他处理方式。
全自动车辆加装障碍物检测系统实现这一功能,具体包括两种方案,一种是接触式障碍物检测(被动式障碍物检测),这种方案主要依赖于接触式障碍物检测装置前端探测横梁的撞击,若引起位移则确认有障碍物,另外一种是非接触式障碍物检测(主动式障碍物检测),其核心是摄像机及雷达进行探测后,根据算法判断障碍物是否存在[5],信息上传到TCMS 及控制中心。
2.2 脱轨检测系统
脱轨检测是指车辆监测到脱轨或者构架失效时,紧急停车并向信号系统报告,包括三种方案,接触式、非接触式及振动式。接触式脱轨检测系统通过障碍物检测系统共同实现,非接触式方案通过感应式接近传感器监测铁轨位置,发送脱轨信号,振动式方案利用安装在转向架或轮对上的振动传感器检测振动信号,判断是否脱轨[6],信息上传到TCMS 及控制中心。
实际车辆设计通常将障碍物检测与脱轨检测系统两者合二为一,以降低轴重,简化转向架结构,提高运行可靠性。
2.3 走行部监控检测系统
全自动车辆通过加装振动、轴温传感器,施行走行部安全监测与故障诊断技术,实现走行部故障早期实时自动诊断的功能,保障车辆运行安全,信息上传到TCMS 及控制中心。
2.4 弓网(靴轨)监测系统
全自动车辆采用受电弓受流的车辆宜设置受电弓检测系统;采用受流器受流的车辆应实现受流器的本地及远程自动升降靴控制;对受电弓进行在线实时检测,信息上传到TCMS 及控制中心。以弓网监测系统为例,包括地面服务站和车载设备。地面设备安装于运营单位机房或者办公室,车载设备安装于地铁车辆上。车载设备包括车内设备和车顶设备。车内设备包括数据处理中心和安全供电模块。车顶设备包括受电弓监测模块、弓网温度测量模块、弓网燃弧测量模块、接触网几何参数测量模块、环境监测模块、系统定位模块和数据传输模块[7]。
2.5 司机室及内装设计
全自动车辆通常拆卸后端墙系统,不单独设置司机室,仅配置临时隔挡,以增加定员及乘客体验,取消或配置折叠司机座椅,设置可封闭的有锁闭报警装置且具备防水防尘功能的司机台,封闭司机室外露电气件,同时取消司机室侧门[8]。
2.6 关键部件冗余设计
由于全自动无人驾驶地铁车辆上没有运营工作人员,对于车辆的冗余设计及可靠性设计要求更高。为了尽可能减少由于单个设备故障导致的无人驾驶车辆降级运行,在地铁车辆设计过程中需充分考虑各系统冗余设计。因此车辆在电路、牵引、辅助、控制、制动、车门、广播、空调、照明等系统均采用冗余设计方案,充分考虑各系统的冗余设计及采用具有更高可靠性的技术,尽可能减少全自动无人驾驶车辆降级运行,保证地铁车辆正常运行[9]。
2.7 防火安全
为保证防火安全,车辆需提升电气屏柜防火性能,采取优化耐火隔板、通风散热设计等措施,以减少起火的概率,控制火势蔓延的速度。提升强化烟火报警系统功能及报警流程,敷设感温电缆,对车厢内外及车体下方设备进行实时火灾监控报警[10]。
3 RAMS 差异
与传统列车相比,全自动运行列车需面对更高的安全风险挑战,其RAMS 要求更高。
3.1 可靠性要求
列车发生故障的频率反映了列车的可靠性。按故障导致的后果,列车故障可分为两类:
(1)导致列车发生≥2 min 初始延误的故障,参考控制目标为≤1.44×10-6次/(车·km)。
(2)导致不适合继续服务或未能出车的故障,参考控制目标为≤0.41×10-6次/(车·km)。
全自动运行列车的可靠性指标还需参照既有项目的故障数据等,来分配列车各子系统的可靠性指标权重,以使整车的可靠性指标可控。
3.2 可维修性要求
根据全自动运行列车可维修性用时要求,列车在线维修可更换单元不超过0.5 h,无需架车作业的维修工作不超过4.0 h,需架车维修的作业不超过6.0 h。
3.3 安全完整性等级要求
依据EN50128 与EN50129 标准要求,全自动车辆子系统如TCMS、制动、牵引等部件安全完整性等级(SIL)要求,常见指标如表1 所示。
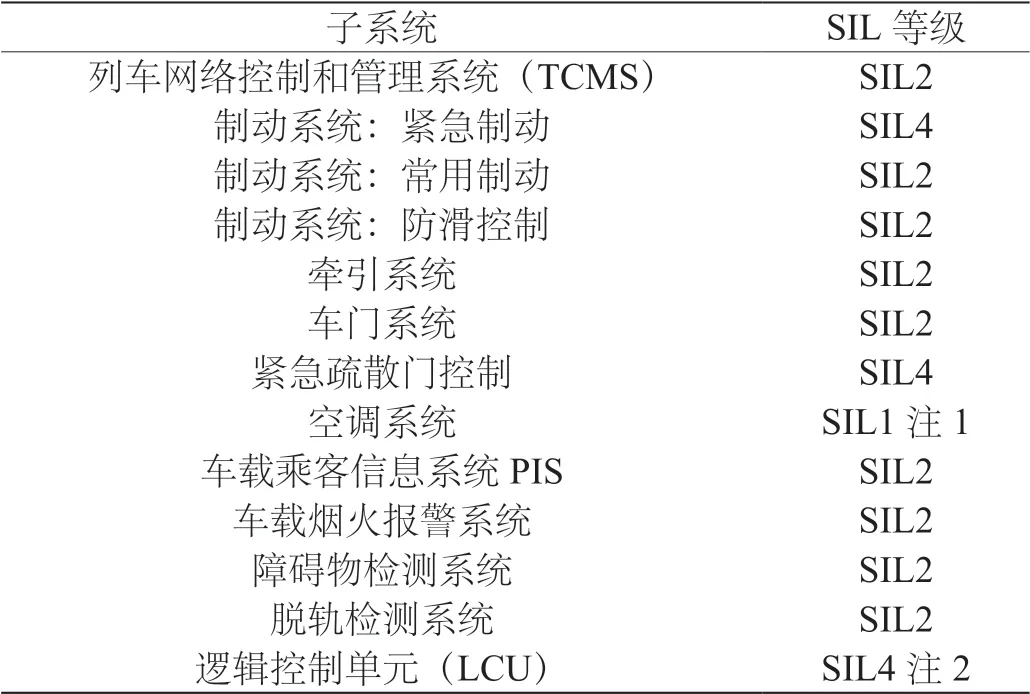
表1 全自动运行车辆部件安全完整性等级(SIL)要求
4 接口差异
全自动车辆相关设计在无司乘人员干预下完成,因此车辆与信号、通信及综合监控等系统增加了较多的接口功能,全自动运行系统车载设备与车辆的接口技术是实现地铁线路全自动运行的关键技术之一。
4.1 车辆与信号系统接口差异
全自动车辆与信号新增的关键接口功能包括列车休眠、列车唤醒、逃生门控制、蠕动模式控制、列车鸣笛控制、紧急制动复位、轻制动控制和列车联挂等,而传统CBTC 信号系统均通过人工实现上述功能。
车辆与信号系统的接口包括信号车载系统与列车牵引子系统、制动子系统及车辆控制子系统之间的接口。
4.2 车辆与通信系统接口差异
全自动车辆与通信接口中增加与IMS(Image Monitoring System,视频监视系统)、PIS(Passenger Information System,乘客信息系统)、RAD(Radio Communication,无线通信系统)等系统的联动,完成紧急呼叫激活、紧急操作装置激活、车辆火灾报警等紧急情况下的处理;通过RAD,实现乘客与控制中心的双向语音通信,通过PIS,实现信号、车辆、控制中心、车辆PA(Public Address,广播系统)和IMS 之间的联动;通过IMS,实现车载的视频监控,实现信号、车辆、控制中心、车辆PA 的联动。
4.3 车辆与综合监控系统接口差异
全自动车辆增加了与综合监控系统的联动,如紧急呼叫激活、紧急操作激活、早间上电、车站火灾等。
5 总结
整体而言,全自动运行车辆与非全自动运行车辆差异主要体现在运行模式、控制方式、列车状态监控、安全需求等方面,该文在此基础上详细介绍了车辆功能要求、软硬件配置、RAMS、接口上的具体差异,当然有些全自动车辆在此基础上增加了诸如乘客拥挤度分析系统、智能运维系统、车门障碍物检测系统、轨道状态检测系统、司机眼系统等装置,这些装置并非必装选项,该文并未展开分析,但相信未来越来越多的全自动设备将应用于全自动运行车辆及线路上。
猜你喜欢
汽车工程师(2021年12期)2022-01-17
快乐语文(2021年15期)2021-06-15
童话世界(2020年13期)2020-06-15
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
故事大王(2019年4期)2019-05-14
城市轨道交通(2019年2期)2019-04-04
工程建设与设计(2016年1期)2016-02-27
汽车维修与保养(2015年2期)2015-04-17