下肢康复机器人的控制系统研究
2022-09-08 08:13谭苗苗
机械工程师 2022年9期
谭苗苗
(北京联合大学 a.北京市智能机械创新设计服务工程技术研究中心;b.机器人学院,北京 100027)
0 引言
康复机器人已迅速发展为新兴的康复治疗技术,成为机器人技术在医学领域的新应用。与传统的康复方式相比,康复机器人可根据记录的康复数据分析有效调整康复模式,更重要的是可方便推广,使更多的患者受益。
康复机器人的控制系统是实现康复动作并保证系统安全稳定运行的关键。目前常用的控制系统主要有嵌入式控制系统、PLC、工控机和实时仿真控制系统等[1]。玄兆燕等[2]采用基于STM32的嵌入式平台,由STM32F4微控制器与电动机驱动器、传感器搭建控制系统,以CAN总线通信方式实现对下肢康复机器人驱动电动机的控制。朱文超等[3]采用两个PCI-1240运动控制卡控制坐姿下肢康复机器人的双侧下肢,实现下肢单一关节重复性训练和多关节联合的步态康复训练。穆载乐等[4]针对上下肢康复机器人,采用ESCON控制器和PCI6221数据采集卡,基于极点配置法建立了位置闭环控制系统,对各关节实现独立和上下肢8个关节的联动运动控制。
除控制系统设计外,康复机器人控制策略的研究也取得了一定成果。尹贵等[5]对下肢康复机器人运用自适应控制策略,且采用按需辅助的方法,基于康复轨迹跟踪,结合人机系统动力学模型估算完成理想期望轨迹所需的辅助力矩。张小栋等[6]在表面肌电信号感知基础上,提出下肢康复机器人人机交互控制方法,利用表面肌电信号检测患者肌肉活动状态和康复程度,对患者运动意图进行预测,形成符合意愿的运动轨迹,同时对患者运动能力进行评估,达到辅助力的自适应。陈宇等[7]针对康复机器人运动过程中摩擦干扰因素的影响,采用模糊补偿控制策略减弱干扰因素,实现有效的关节控制。李彩凤等[8]结合模糊控制理论和PID控制提出对下肢康复机器人的模糊自整定PID控制算法,提高控制精度、平稳性和响应速度。谢晓龙等[9]采用关节空间控制策略实现轨迹跟踪控制,每个驱动关节采用独立的控制策略。还有研究者[10-12]采用基于神经网络的鲁棒控制器结合计算力矩法,基于阻抗模型的交互控制,或通过位置控制器进行轨迹跟踪控制,采用阻抗控制方式提高康复过程的安全性。
下肢关节主要包括髋关节、膝关节和踝关节,现有的研究往往局限于某个关节或者多个关节的某几个方位运动,无法实现关节所有康复动作的全覆盖[13]。另一方面对于关节活动角度的范围也有限[14-15]。在所设计的下肢康复机器人机构基础上,设计安全有效的控制系统和控制算法是实现康复动作既定目标的重要环节。
1 下肢康复机器人的系统总体方案
所设计的下肢康复机器人如图1所示,采用平卧式外骨骼设计,以髋关节为中心的回转、俯仰、翻转3个转动自由度及膝关节回转自由度组合为四自由度康复机器人。
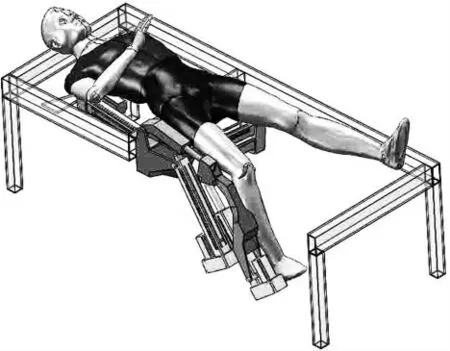
图1 四自由度下肢髋关节康复机器人总体示意图
其中,康复机器人的运动机构是完成康复动作的核心部分,也是控制系统的控制对象(如图2),由连杆机构和4个折弯直流伺服电动缸组成。每个康复动作是通过1个或多个伺服电动缸的相互配合,并按照预定轨迹驱动机构运动来实现。为实现目标活动角度的关节康复动作,对电动缸的控制系统设计尤为重要。
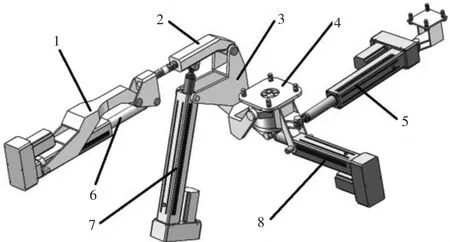
图2 康复机器人的运动机构部分
所设计的控制系统的总体方案如图3所示,由上位机、1个基于STM32的运动控制卡、4个伺服直流电动机驱动器、2个角度传感器和1个肌肉信号传感器组成。上位计算机将康复动作指令写入运动控制卡,运动控制卡将运动控制信息处理后发送到伺服驱动器,驱动电动缸按照指令信号动作,从而完成不同的康复动作。同时,通过角度传感器和肌肉信号传感器反馈患者的康复状态。

图3 控制系统的总体框图
其中,角度传感器是对患者康复动作角度范围的信号反馈,电动缸的编码器用于测量电动缸中推杆的动作位置,而肌肉信号传感器作为患者对康复强度耐受程度的反馈。
2 系统硬件设计
采用RH407运动控制卡,基于STM32处理器,具有4个输入输出接口,分别连接4个驱动电动缸的伺服驱动器。
伺服驱动器采用ASDA-B2标准型直流电动机驱动器。驱动器由220 V/50 Hz电源供电,额定功率为200 W。该伺服控制器有位置模式、速度模式和转矩模式3种模式驱动电动机。以身高175 cm、体重100 kg的人体为参考,康复机器人完成康复动作过程中,运动速度与负载要求不高,这里选用位置模式。位置模式是利用具有方向性的命令脉冲波信号输入来操纵电动机的转动角度,实现在一个特定的位置进行往返运动。
采用ASDA-B2交流伺服电动缸,其额定功率为0.2 kW,额定转矩为0.64 N·m,额定转速为3000 r/min。利用伺服电动机驱动电推杆,电推杆中的丝杠会使旋转运动变为直线运动,完成电推杆的伸缩。
角度传感器是检测患者关节的实现角度,与机器人的关节输出角度比较,形成闭环控制。角度传感器采用AST Macro Sensors RSE角度位移传感器, 角度感应范围为0°~355°,输出为小于10 V的直流电压信号。满足康复机器人康复角度0°~150°的要求。其中,一个角度传感器测量下肢髋关节屈髋和后伸康复角度,另一个角度传感器测量内外旋和内收外展角度,安装在回转平台上。
肌肉信号传感器采用自行设计的压阻传感器阵列,该传感器供电电压为5 V,输出电压信号。判断人体康复关节周围的肌肉收缩程度。在纺织条状带上分布5个压阻传感器,当肌肉状态发生变化时,传感器与肌肉表面产生接触压力,从而产生信号输出。
当患者处于被动康复过程时,肌肉不发力,依靠康复机构的运动实现康复动作。当检测到肌肉收紧时,判断人体承受康复角度达到耐受上限,反馈给控制系统停止继续该运动模式。当患者处于康复机器人辅助的主动康复状态时,患者肌肉需要发力,此时的肌肉信号传感器产生一个输出量,反馈患者康复过程中的肌肉力量信息。
3 系统软件设计
下肢髋关节康复机器人的控制系统软件程序主要包括电动缸的运动控制程序、上位机与运动控制卡的通信程序,以及上位机人机交互界面。由人机交互界面输入康复动作指令,运动控制卡将指令转换为电压信号控制电动缸按照指定轨迹和速度运行。根据控制系统程序,康复机器人可完成髋关节屈髋、后伸、外展、内收、外旋和内旋6种康复动作。
屈髋和后伸工作流程为:当按下复位按钮时实现开机电动缸归于初始位,按下俯仰和屈膝电动缸启动按钮,屈膝电动缸推动电推杆实现屈膝动作,延时1 s后,俯仰电动缸运行,通过交替运行2个电动缸来实现屈髋角度。该过程可在上位机交互界面上修改行进速度和时间,实现康复动作的调速。当按下反转按钮则可实现后伸康复动作,在动作完成时可按复位按钮回到初始位置。
外展和内收康复动作流程为:由腿部平放的初始状态开始,启动外展动作按钮,回转电动缸开始运行,患者下肢围绕回转平台的回转中心向外展开,接近设定展开角度时,电动缸运行速度减小,达到角度设定值时停止。延时10 s后,回转电动机反转回到原位平放状态,外展康复动作一个流程完成。内收康复动作流程由两腿并拢平放状态为起始状态,按下内收动作按钮,俯仰电动缸运行30 s,将康复腿抬高一定角度,然后回转电动缸运行,到达设定角度后停止。延时10 s后回转电动缸反转,然后俯仰电动缸反转回到起始状态停止。一次内收康复动作完成。
内外旋康复动作流程为:启动内旋按钮,屈膝电动缸和俯仰电动缸先后运行,完成屈髋动作,当达到设定角度后延时5 s,回转电动缸运行,患者髋关节开始绕回转中心内旋,达到设定角度后停止。延时5 s,回转电动缸、俯仰电动缸和屈膝电动缸依次运行,回到平放起始位置,一次内收动作流程完成。外旋康复动作的工作流程与内旋动作一致,仅回转电动缸的运行方向相反。
上位机与运动控制卡通过串口连接,采用串口查询方式,流程如图4所示。
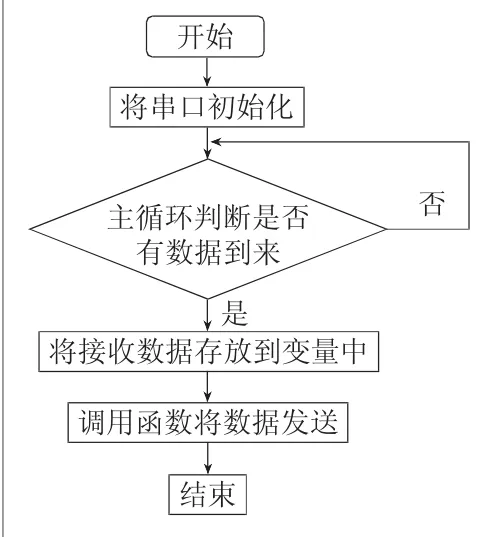
图4 串口查询程序流程图
电动缸控制主程序如图5所示。每个电动缸推杆的速度决定了机器人康复动作的执行速度。为适应不同康复阶段和患者不同的康复状态,采用PWM波输入信号实现对电动缸运行速度调节。通过查询判断按键按下状态,分别执行屈髋、后伸、外展、内收、外旋和内旋6种康复动作运行程序。
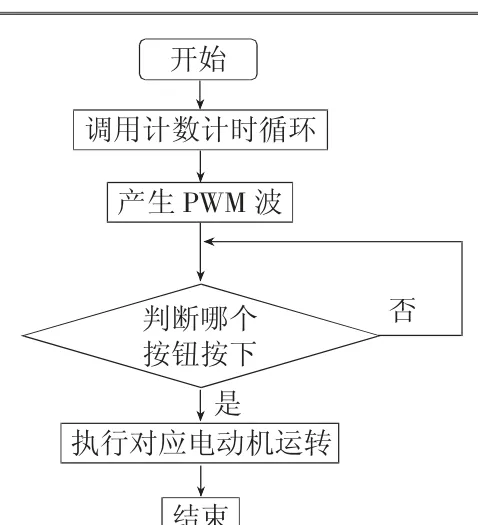
图5 电动缸控制子程序流程图
上位机人机交互界面程序采用LabVIEW软件,实现对下位机启停及康复模式的控制,以及对每次康复数据的实时显示和存储。
人机交互界面如图6所示(图中仅展示了后伸康复动作及控制按钮部分),共包含6种模式,按模块形式显示,分别为屈髋动作、外展动作、后伸动作、内收动作、内外旋动作。每个模块均有髋关节和膝关节角度实时显示、角速度显示、最大角度设置和显示,每个动作均可自动控制和点动操作。角度和角速度需按电动缸输出行程换算。点动角度为0.05°。各传感器采集的各种角度信号、肌肉信号、行程长度等通过算法被转换成数值或数组,再通过数值显示框或图表等形式实时显示。通过上位检测角度信息,当发生实际动作角度超过预设角度值的状况时,下位机会立即停止动作并发出报警。在上位机中建立了数据库,用来记录用户康复状态的数据,可以方便使用者了解患者康复过程、康复现状及制定个性化的康复计划。
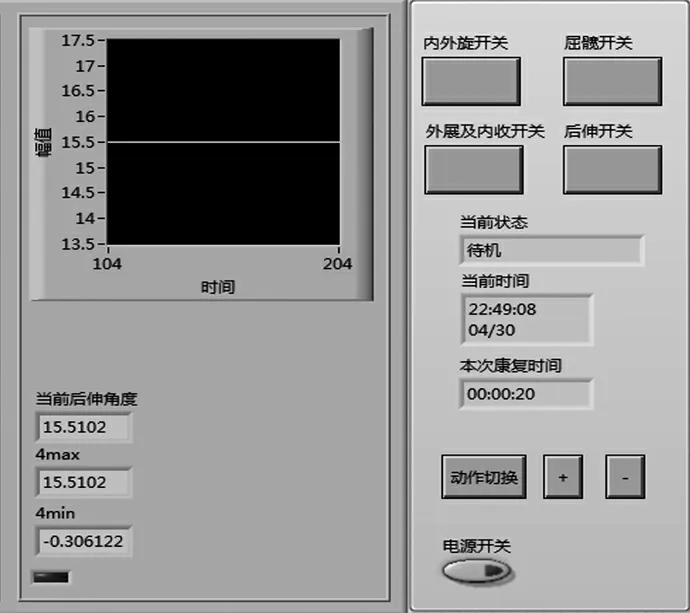
图6 上位机人机交互界面图
通过软硬件调试和仿真实验,该控制系统能实现下肢髋关节6种康复动作,且能对康复数据实时显示和存储。
4 结论
通过下肢康复机器人的控制系统软硬件设计及调试,最终实现了康复机器人6种康复动作,仿真实验证明每个康复动作均达到了关节活动范围。控制系统由STM32和运动控制卡、伺服驱动、角度传感器、肌肉信号传感器等组成。利用角度传感器检测患者康复角度,肌肉信号传感器检测患者康复强度和反馈,运动控制卡根据要求做出相应判断并发送信号给驱动模块,从而自动调整4个电动缸的运行模式,实现了下肢康复机器人的康复动作。搭建了上位机控制和监测人机交互界面,实现了康复模式的实时控制及对康复数据的显示和存储,方便建立个性化的康复计划。
猜你喜欢
现代临床医学(2022年4期)2022-09-29
健康护理(2022年3期)2022-05-26
中国典型病例大全(2022年13期)2022-05-10
作文小学高年级(2022年3期)2022-04-20
小读者(2021年2期)2021-03-29
福建中学数学(2018年1期)2018-11-29
汽车观察(2018年10期)2018-11-06
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
37°女人(2017年8期)2017-08-12