
基于均匀圆阵相干信源的二维DOA估计
2022-09-08 12:28:56司伟建
雷达科学与技术 2022年4期
晏 辉, 司伟建
(1. 哈尔滨工程大学信息与通信工程学院, 黑龙江哈尔滨 150001;2. 哈尔滨工程大学先进船舶通信与信息技术工业和信息化部重点实验室, 黑龙江哈尔滨 150001)
0 引 言
阵列信号处理是现代雷达系统中的热点研究问题,波达方向(Direction of Arrival,DOA)估计技术作为重要分支更是得到广泛应用。为了得到目标精确的角度信息,许多经典算法已经被应用于实际工程中,如多重信号分类法(MUSIC)和旋转不变子空间技术(ESPRIT)。但是随着通信环境的日益复杂,多径传播和同频干扰环境下产生了高度相关和相干信号源,使接收数据协方差矩阵缺秩,噪声子空间与信号子空间不再正交,上述常规算法失效,需要通过诸如空间平滑、矩阵重构和Toeplitz化等解相干操作后才能得到准确的估计结果。均匀圆阵(Uniform Circular Array,UCA)作为最常用的阵列之一,相比均匀线阵(Uniform Linear Array,ULA),不仅能够提供[-180°,180°]的方位角估计,还具备方向图在任何方位都有相同的波束形状、容易共形和导向矢量共轭对称等诸多优势。由于UCA的导向矢量比较复杂,不具备ULA的范德蒙结构,许多常规方法不能直接应用。针对上述问题,文献[5]首次提出模式空间变换的概念,通过构造模式空间变换矩阵,将UCA变为导向矢量具备范德蒙结构的虚拟ULA,学者们由此展开深入研究。文献[6]提出均匀圆阵实值波束空间多重信号分类法(UCA-RB-MUSIC)和均匀圆阵旋转不变子空间法(UCA-ESPRIT),通过构造实值波束变换矩阵,利用MUSIC和ESPRIT算法估计信号二维角度信息,但是该方法不能估计相干信号;文献[7-8]分别利用阵列平移和划分子阵列的方法解相干,然后利用二维谱峰搜索估计信号角度信息,计算量较大无法满足实时需求;文献[9-10]分别利用Toeplitz化和矩阵重构法估计相干信号,分辨率高实时性好,但只能得到一维角度信息;文献[11-12]提出基于稀疏重构模型下的相干信号二维DOA估计方法,准确性高且对相干信号不敏感,但是涉及复杂的数学优化问题,求解困难;文献[13-14]分别利用双圆阵平移和双圆阵Toeplitz重构方法估计二维相干信号,但损失了一个子阵的阵元。
本文在文献[13]的基础上,采用单一圆阵轴向虚拟平移,通过对平滑后的协方差矩阵去噪处理,利用波达方向矩阵法对俯仰角的稳健性估计出信号的俯仰角;然后将平滑后的协方差矩阵与波束空间变换矩阵相乘得到波束域协方差矩阵,使UCA变为导向矢量具备范德蒙结构的虚拟ULA,最后利用求根MUSIC算法估计信号的方位角。所提方法无需复杂的二维谱峰搜索,方位角和俯仰角自动配对。仿真表明该方法在低信噪比、信号高度相关和相干时仍能得到准确的估计结果,与传统UCA-RB-MUSIC和UCA-ESPRIT算法相比,计算量更小、分辨率更高,可以应用在弹载、机载阵列或其他移动阵列系统中。
1 阵列结构和信号模型
如图 1所示,假设个各向同性的阵元、均匀分布在半径为的圆周上,个远场、窄带、波长为的相干信号入射到该阵列。入射信号俯仰角∈[0,π], 定义为入射方向与轴正向夹角;方位角∈[-π,π], 定义为信号入射方向在平面的投影与轴正向夹角。在不考虑阵列误差、通道不一致和互耦影响下,阵列接收数据矢量为
()=()+()
(1)


图1 阵列结构图
2 基于波达方向矩阵的波束空间变换法
2.1 波达方向矩阵法
文献[15]首次提出波达方向矩阵法,对于非相干信号源,基于和两个平行线阵的数据接收矢量:

(2)
式中,′为线阵导向矢量,为阵列与阵列的相位差对角矩阵,该矩阵只与信号的俯仰角有关。′()的自协方差矩阵为

(3)
′()和′()的互协方差矩阵为

(4)
式中,=E[()()],为单位矩阵。因为噪声矢量互不相关,互协方差矩阵中不含噪声方差项。定义的信号部分为
0=-
(5)

(6)
然后通过与相乘构造波达方向矩阵:

(7)
该文献证明波达方向矩阵满足如下关系:
=
(8)
即通过对波达方向矩阵特征分解得到特征值和特征向量,其中非零特征值对应对角阵,非零特征值对应的特征向量与导向矢量相等,利用此对等关系即可以估计得到俯仰角和方位角。
2.2 俯仰角估计
文献[13]针对相干信号采用双圆阵轴向平移,利用两个子阵的自协方差矩阵和不含噪声方差项的互协方差矩阵构造波达方向矩阵,然后通过特征分解估计出俯仰角和方位角。其相位差矩阵为

(9)
式中,为两个子阵间距,diag[·]表示对角化。其俯仰角具体求解为

(10)
式中,为特征分解的非零特征值(∈[1,…,])。但是在求解方位角时,由于∈[-,],容易出现测向模糊,需要解模糊处理;此外,在对波达方向矩阵进行特征分解时,特征向量并不唯一,需要进行额外处理使特征矢量和导向矢量对应相等;且在低信噪比时,波达方向矩阵法在求解方位角时对噪声非常敏感,文献[13]采用双圆阵列,消除互协方差矩阵中的噪声方差项,但是却损失了一个子阵的阵元,阵元数较大。
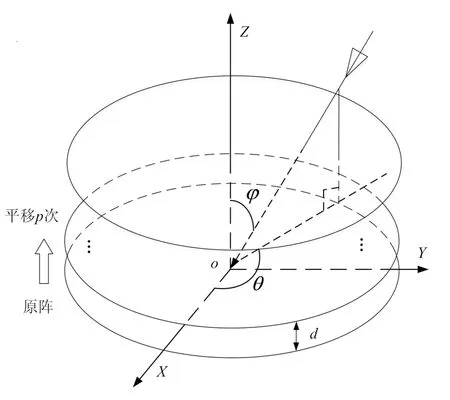
图2 阵列平移图
则虚拟平移阵元接收数据矢量为
()()=()()+()
(11)
式中相位差矩阵如式(9)所示,则对应的子阵自协方差矩阵为

()(())+
(12)
相邻子阵间互协方差矩阵为
(+1)(())+
(13)



(14)



(15)


(16)



(17)


(18)
去噪后的互协方差矩阵为
(19)
2.3 方位角估计


(20)



(21)
由波束导向矢量可以看出,导向矢量的俯仰角和方位角已经分离。在利用波达方向矩阵法求出俯仰角后,可以直接利用求根MUSIC算法估计出方位角信息[],求根多项式为

()
下面给出本文方法的具体步骤:
步骤: 获取阵列接收数据矢量();
步骤: 采用虚拟平移,分别得到平移后的各个虚拟子阵数据接收矢量()();



步骤: 对进行特征分解得到噪声子空间;
步骤: 根据式(),利用求根MUSIC算法估计方位角。
3 仿真实验
为了验证所提方法的正确性、分析所提方法的优缺点,分别做如下仿真实验。实验为验证本文方法对二维相干信号估计的有效性;实验为验证本文方法对高度相关信号的有效性,对比算法为文献[]中的UCAESPRIT算法和UCARBMUSIC算法;实验为验证信号相干情况信噪比对本文方法的影响,对比算法为文献[]中算法;实验为验证信号相干情况阵元数对本文方法的影响,对比算法为文献[]中算法。
实验验证本文方法对相干信号的有效性。假设个窄带等功率相干信号分别从(°,°)、(°,°)、(°,°)、(°,°)入射到图所示阵列。阵元数,各相邻阵元间距.,为了减少波束空间变化中的残差影响,取半径*/(*π)。仿真的快拍数为,信噪比dB,独立进行次蒙特卡罗实验。仿真结果散点图如图所示,在个信号完全相干情况下,所提方法仍能够准确估计出目标信号的二维角度信息,且误差较小准确性较高。

图3 实验1估计结果散点图
实验验证本文方法对高度相关信号的有效性。假设个窄带等功率相关信号分别从(°,°)、(°,°)、(°,°)、(°,°)入射到图所示阵列,各信号相关系数均为.,,阵元间距、半径和快拍数与实验相同。独立进行次蒙特卡罗实验,仿真得到不同信噪比下本文方法、文献[]中UCAESPRIT算法和UCARBMUSIC算法的估计结果均方根误差变化。均方根误差定义为

()
式中,为蒙特卡罗次数,(,)为信号真实值,(,)为信号的第次估计值。
仿真结果如图所示,UCAESPRIT算法估计性能较差,UCARBMUSIC性能最好,本文方法居中。分析原因主要是因为MUSIC算法用二维谱峰搜索带来的巨大运算量换取了较好的估计性能;而ESPRIT算法直接计算得到二维角度信息,运算量小,估计性能差;本文方法存在多次特征分解,计算量居中,但是性能接近MUSIC算法。显然计算复杂度和估计性能需要折中选择,本文方法估计性能好且计算复杂度不高,可以满足工程实际应用。
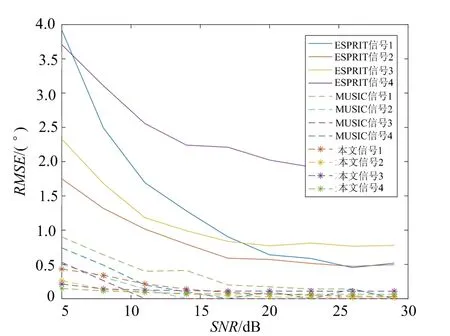
图4 实验2均方根误差随信噪比变化图
实验验证信噪比对本文方法的影响。假设个窄带等功率相干信号分别从(°,°)、(°,°)、(°,°)、(°,°)入射到图所示阵列。,阵元间距、半径和快拍数与实验相同。信噪比从dB步长为dB增加到dB,蒙特卡罗实验次数为,仿真得到本文算法和文献[]中算法的估计结果均方根误差随信噪比变化情况,如图所示。从图中可以看出,信噪比较高时,本文方法性能略低于文献[]中算法;当信噪比小于dB时本文方法性能高于文献[]中算法,相比二维谱峰搜索带来的巨大计算量,本文所提方法计算量较小实时性更高,且在低信噪比条件下估计性能更好。

图5 实验3均方根误差随信噪比变化图
实验验证阵元数对本文方法的影响。假设个窄带等功率信号分别从(°,°)、(°,°)、(°,°)、(°,°)入射到图所示阵列。阵元间距、半径和快拍数与实验相同,dB。阵元数从步长为增加到,蒙特卡罗实验次数为,仿真得到本文算法和文献[]中算法的估计结果均方根误差随阵元数变化情况,如图所示。从图中可以看到两种算法性能无较大差别,个信号的均方根误差都比较小;本文方法在阵元数小于性能开始逐渐变差,当阵元数小于时已经无法准确估计目标结果;且随着阵元数增加,本文所提方法的估计结果均方根误差并非严格单调,这是因为阵元数的奇偶性实际上对波束空间变换的估计结果是有一定影响的[]。但是文献[]采用的是双圆阵,损失了一个子阵的阵元,实际阵元数是本文方法的两倍,所需阵元数是比较大的。但是本文方法无子阵列的损失,在阵元数大于时,分辨性较好,可以满足实际工程应用需求。

图 6 实验4均方根误差随阵元数变化图
4 结束语
本文通过均匀圆阵的轴向平移,利用波达方向矩阵法对俯仰角估计的稳健性,通过去噪处理后估计得到俯仰角信息;然后通过波束空间变换将导向矢量中方位角和俯仰角分离,使圆阵导向矢量具备范德蒙结构,最后利用求根MUSIC算法估计得到方位角。该方法无需复杂的二维谱峰搜索,俯仰角和方位角自动配对,且不用损失一个子阵的阵元。通过仿真实验可以看出,该方法耗时较少,在低信噪比环境下仍能得到准确结果,分辨率高,满足现代雷达复杂移动阵列场景下测向要求。但本文方法在阵元数较小时()性能显著下降,如何将本文所提方法应用到少阵元环境是后续工作重点。
猜你喜欢
卷宗(2021年2期)2021-03-09 07:57:24
空间科学学报(2020年4期)2020-04-22 01:17:04
中南大学学报(自然科学版)(2016年2期)2017-01-19 07:37:03
系统工程与电子技术(2016年4期)2016-08-24 07:46:00
自动化学报(2016年8期)2016-04-16 03:38:55
无线电通信技术(2015年3期)2015-12-23 11:37:00
河南科技(2015年18期)2015-11-25 08:50:14
电测与仪表(2014年5期)2014-04-09 11:34:00
中国科学技术大学学报(2013年8期)2013-03-11 20:18:37
湖南师范大学自然科学学报(2013年5期)2013-03-11 16:25:55
