一种风力发电机组主动净空控制策略研究
2022-09-07 06:13:54王瑞良聂方正
机电信息 2022年17期
杨 翀 王瑞良 孙 勇 王 琳 聂方正
(1.浙江运达风电股份有限公司,浙江 杭州 310012;2.浙江省风力发电技术重点实验室,浙江 杭州 310012)
0 引言
我国国家领导人做出了“中国二氧化碳排放力争于2030年前达到峰值,努力争取2060年前实现碳中和”的国际承诺,驱使着能源电力生产向绿色、低碳转型。而风电作为绿色可持续能源,可大量减少碳排放,因此促进风电消纳是实现碳达峰、碳中和目标的重要举措[1]。风资源开发正逐渐转向低风速、高湍流的风资源区,此类风场大都是山地复杂地形,极端阵风风况较多。阵风特点是风速与风向在短时间内均发生较大变化,易出现极端湍流和极端风剪切叠加的情况,此时风力发电机面临净空不足的情况,行业内已出现多次扫塔事故。
为了解决风力发电机组存在的净空不足问题,行业内对此进行了深入研究,各种监测和控制技术应运而生[2]。郭俊凯等人[3]通过探究风速、桨距角、功率对风力机叶片—塔架净空的影响,分析了叶片—塔架最小净空工况下叶片的结构动态响应。B.P.Williams等人[4]提出在塔筒上安装叶尖距离监测装置,在一定的有效监测距离内,对净空不足的情况做出响应。M.M.Zhang等人[5]通过新增可变后缘襟翼作为控制系统执行机构,采用智能控制策略,使得叶根面外弯矩和叶尖变形量下降30%。L.Zhang等人[6]通过加装毫米波雷达,实时监测叶片到塔架间的最小距离,并引入前馈控制,使得叶片到塔架的最小净空值从5.65 m提升到7.43 m。
本文针对净空不足问题,提出了一种通过激光净空监测雷达实现叶片—塔架净空的实时监测,在净空不足时适当增加桨距角的策略,并选用实际机组进行了仿真验证。
1 主动净空控制策略设计
1.1 极端相干阵风
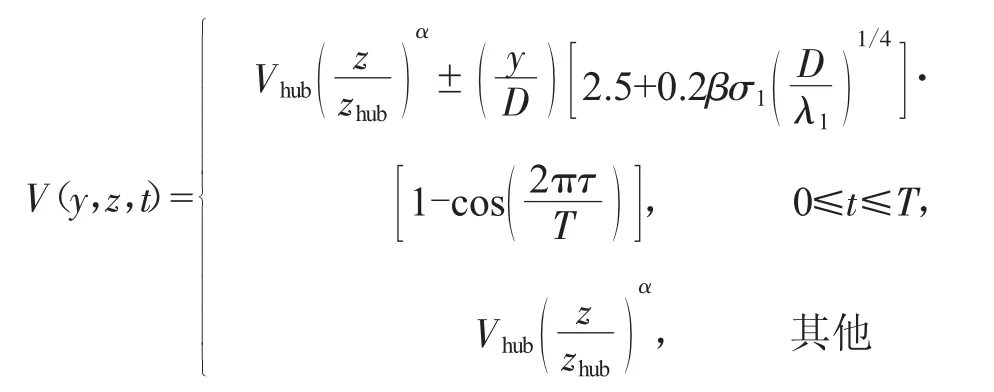
阵风在山地复杂地形容易出现,它的特点是在短时间内风速与风向发生大幅变化。根据IEC 61400-1标准[7]载荷计算的定义,极端湍流模型,方向变化的极端相干阵风的幅值为Vcg=15 m/s,风速变化上升时间为T=10 s,实时风速计算公式为:

风速的上升与风向从0到θcg的变化是同步进行的,风向变化量为:

则同步的实时风向为:

图1为阵风的风速、风向变化示意图,可以看出在短时间内风速与风向都发生了骤变,这对风机的载荷和净空都会产生很大的影响。
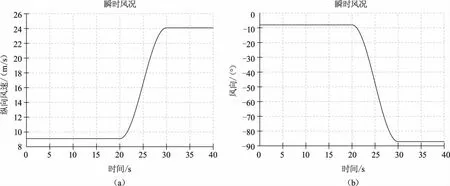
图1 阵风风速、风向变化示意图
1.2 极端风剪切工况
根据IEC 61400-1标准载荷计算的定义,极端风切变EWS工况,瞬时(正向或逆向)垂直切变表示为:

瞬时水平切变表示为:
在EWS工况中的强负向风剪切作用下,风力发电机组叶片在接近塔架时,容易产生净空不足的情况。若EWS和ECD工况发生叠加,叶片扫塔事故发生的概率会进一步增加。
2 主动净空控制策略的实现
2.1 综合净空监测系统
本文提出了一种激光净空监测系统和机载式激光测风雷达相结合的综合净空监测系统及配套的主动净空控制策略,图2为系统结构示意图,激光净空监测系统可以部署于合适的位置,以实现对塔架—叶片净空的实时监测。当叶片旋转至可探测位置,净空监测系统的激光束可以迅速采集到叶尖测点到净空监测系统的距离,经过坐标变换,换算出塔架净空值;机载式激光测风雷达安装于机舱上方,可以实时测量来流方向的风剪切和风速变化率。上述两个设备的信号实时输入风力发电机组控制系统。
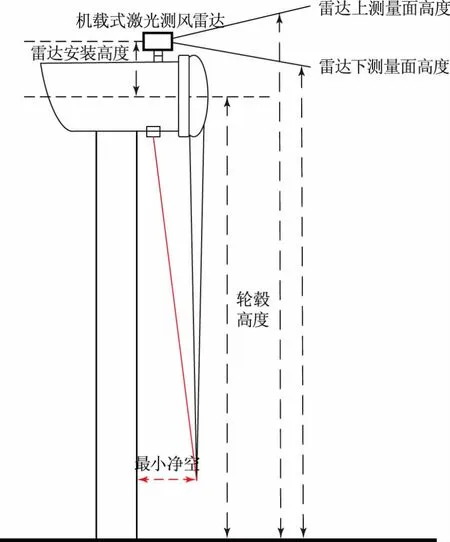
图2 风力发电机组综合净空监测系统示意图
2.2 主动净空控制策略架构
本净空控制策略采用激光雷达净空监测系统的实时测量原始值作为输入,在主控系统内部进行坐标变换等处理,算出叶尖到塔架的实时最小净空值;机载式激光测风雷达实时监测上风向的竖直风剪切和风速变化率。当换算出的实时最小净空值小于净空阈值时,或竖直风剪切小于风剪切阈值,或风速变化率大于指定阈值,则触发主动净空控制。主动净空控制触发后,会在原有桨距角指令上叠加预设的补偿值,削减风轮面推力,提升塔架净空。在经历延迟时间后,桨距角补偿值以斜坡速率退出。主动净空控制流程框图如图3所示。

图3 主动净空控制流程框图
3 仿真评估
采用风力发电机组仿真软件Bladed对该策略进行仿真验证,仿真模型为某3.3 MW双馈机组,风轮直径164 m,额定转速1750 r/min,在IEC规范工况设置下,风力发电机组净空最小工况往往出现在DLC1.3(ETM风况)与DLC1.5(EWS工况)。因此,对DLC1.3(ETM风况)与DLC1.5(EWS工况)开展仿真验证,比较主动净空控制策略的应用效果,从机组的桨距角、净空值等运行参数着手进行对比研究。
3.1 ETM风况仿真验证
本文给出某DLC1.3(ETM风况)下的仿真结果,验证了主动净空控制策略的有效性。结合图4说明开启主动净空控制以后的效果:图4(a)展示了工况中的风速条件,平均风速12 m/s,纵向湍流强度为22%;图4(b)展示了主动净空控制叠加的桨距角;图4(c)展示了主动净空控制开启与否的桨距角时序;图4(d)展示了塔架最小净空值的时序。在本次仿真时序的88 s附近,主动净空控制触发,桨距角进行了及时补偿,提升了机组在93~103 s风速极速上升时的净空值。


图4 ETM风况仿真验证结果
3.2 EWS风况仿真验证
在DLC1.5(EWS风况)下,会出现下风轮面风速显著高于上风轮面风速的情况,即强负剪切工况,在此种工况下,叶尖发生扫塔的可能性会大幅度提升。结合图5说明开启主动净空控制以后的效果:图5(a)展示了轮毂高度、上风轮面和下风轮面的风速情况;图5(b)展示了主动净空控制开启与否的桨距角时序;图5(c)展示了塔架最小净空值的时序。
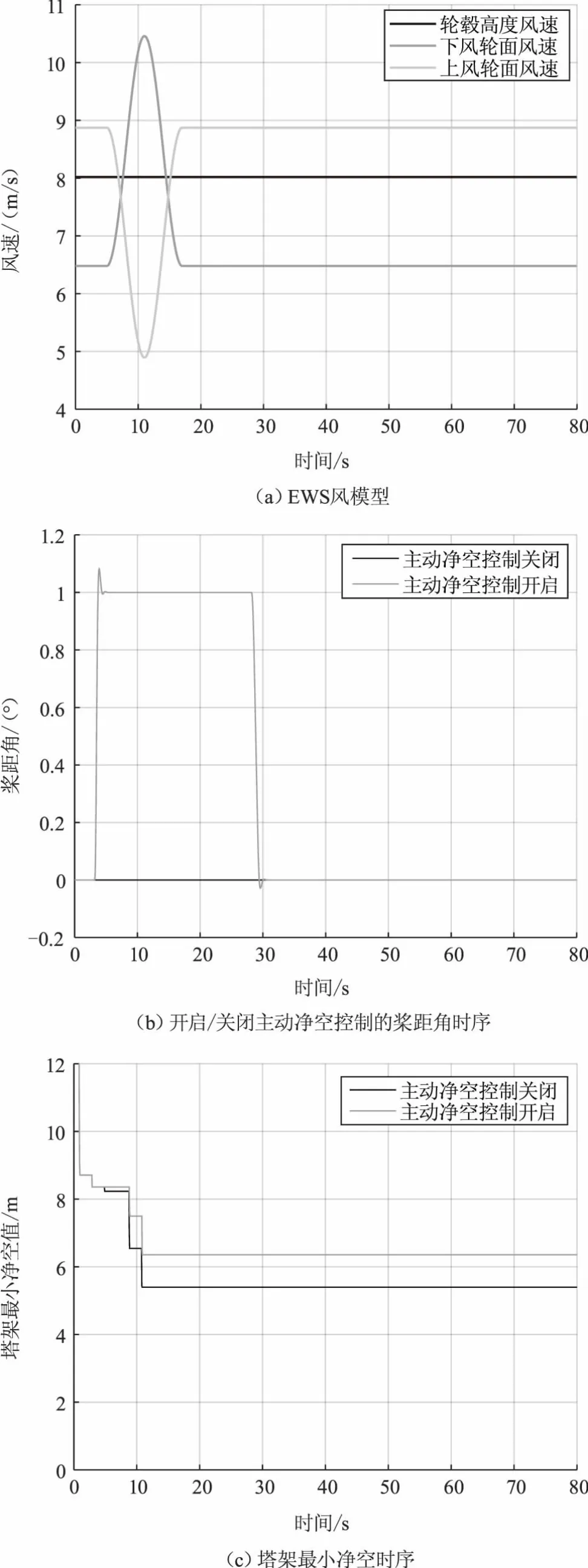
图5 EWS风况仿真验证结果
传统变速变桨控制策略无法对负剪切做出直接响应,而应用了主动净空控制策略以后,塔架最小净空值提升1 m。
4 现场评估
本项技术已经进行批量应用,且能实际捕捉到净空不足并进行补偿。图6展示了某复杂场址条件项目的应用案例,图6(a)展示了发电机转速,图6(b)展示了实测塔架净空值和触发阈值的时序,图6(c)展示了主动净空控制叠加的桨距角值。
从图6可以看出,在现场复杂风况条件下,发电机转速开始骤增,实测塔架净空值下降到触发阈值以下,主动净空控制策略立即进行桨距角补偿,塔架净空值快速恢复到安全水平。
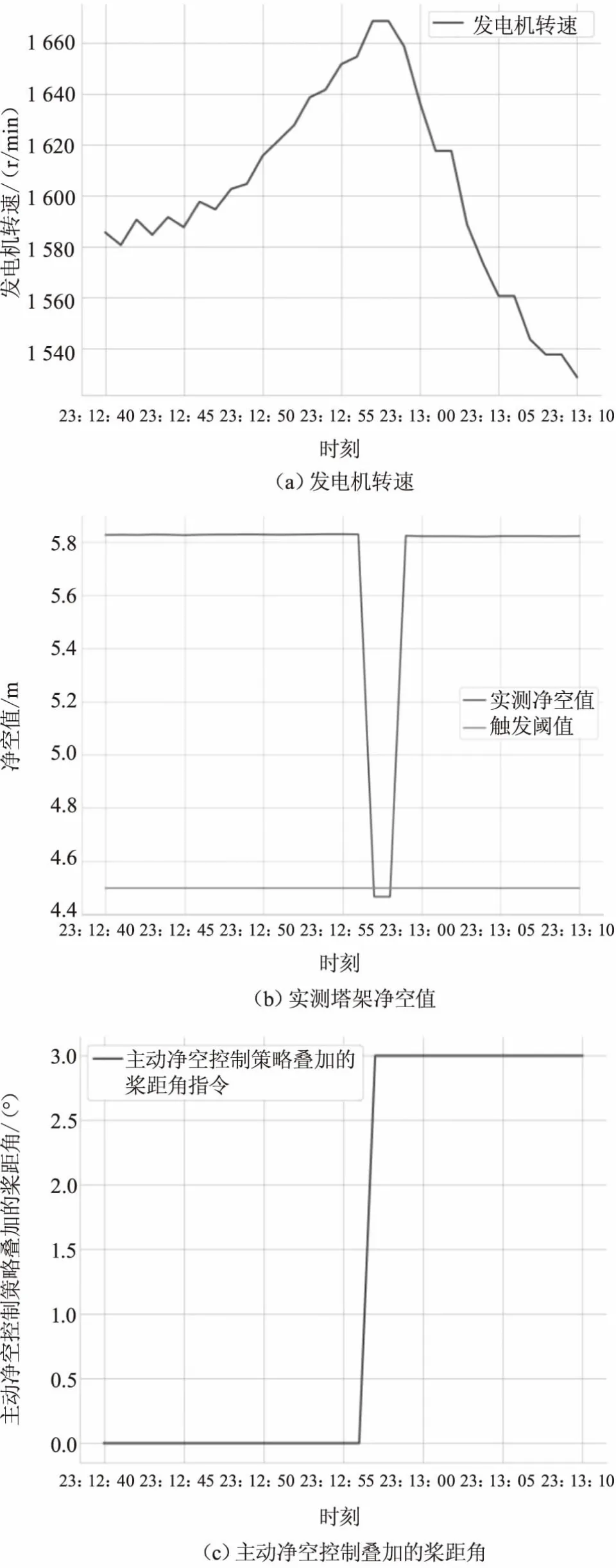
图6 实际应用案例验证结果
5 结论
(1)本文针对复杂场址下风电机组的净空隐患和传统变速变桨控制策略的局限性,提出了一种综合性净空监测系统和配套的主动净空控制策略。
(2)根据Bladed仿真验证和现场实际验证,本控制策略可以在风力发电机的设计中提升塔架净空值,有利于整机优化设计;也可以在实际复杂风况下通过桨距角补偿,提升机组安全性,降低扫塔风险。
猜你喜欢
上海航天(2022年5期)2022-12-05 01:55:46
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
交通科技与管理(2022年8期)2022-05-07 23:54:10
辽河(2022年1期)2022-02-14 21:16:19
辽河(2022年1期)2022-02-14 05:15:04
宝藏(2021年3期)2021-04-20 09:35:56
东方汽轮机(2020年3期)2020-11-04 11:07:34
石油化工建设(2015年6期)2015-12-01 04:17:34
石油化工建设(2015年6期)2015-12-01 04:17:30