基于雷达轨迹数据的航段拥堵分析
2022-09-07 12:57许学吉孙樊荣陈昱君
武汉理工大学学报(交通科学与工程版) 2022年4期
许学吉 孙樊荣 沐 瑶 陈昱君
(南京航空航天大学民航学院 南京 211106)
0 引 言
民航业的快速发展带来空中交通流量日益增多,致使我国航路交通拥挤情况愈发严重.如何精确有效分析航路网中的拥堵航段情况对于提高管制人员对航路网中航段的拥堵认知具有重大意义.
在空中交通领域对航路拥堵没有统一的定义.赵嶷飞等[1]将空中交通拥堵整体划分为多个空中交通单元,基于系统性和层次结构性等原则,建立了交通拥堵判定评估指标.Rehwald等[2]将机场进离场交通需求与容量的不平衡作为机场交通拥挤状态的概念.李善梅等[3]基于灰色聚类算法,分析了交叉航路的拥堵定义,研究了交叉航路拥堵情形,建立了交叉航路拥堵识别模型.徐肖豪等[4]提出了依据所用交通数据尺寸不同,建立了不同的空中交通拥堵与识别方法.Bongo等[5]提出了一种基于模糊决策试行与评价实验室方法,网络分析法和模糊优劣解距离法概念的新型混合多准则决策方法,来解决菲律宾的空中交通拥堵问题.杨磊等[6]基于元胞传输理论,建立机场场面离散差分欧拉—拉格朗日宏观交通流模型,挖掘出临界交通流密度影响机理.蒋京芩[7]提出了基于聚类和实验的方法,建立了不同因素影响下终端区空中交通拥堵态势的演变机理.代晓旭[8]提出了基于交叉航路运行特征,建立拥挤传播模型,从而发掘空域拥挤传播规律.李桂毅[9]建立交通运行状态划分模型,确定了航路网交通运行态势的划分方法和标准.张兆宁等[10]从空中交通流的角度出发,根据容量和流量的矛盾关系定义了空中交通拥挤和拥堵的概念.张兆宁等[11]从机场和航线的角度建立了空中交通网络流系统的拥堵识别模型,结合模糊综合评价法对拥堵程度进行了评估.赵伟东[12]分析了终端区交通拥堵的演变机理,提出了多指标综合评价方法.
以上研究大多都是基于交通需求和空中交通管理系统的总体容量的矛盾来表征拥堵定义,具有一定的抽象性,不能直观的展现拥堵态势.而且主要通过指标集对空中交通拥堵进行研究,而对于具体的航段拥堵的研究不多.文中基于航路网交通拥堵表现形式和实际运行情况,提出用平均飞行时间表征航段拥堵定义,并分析了雷达轨迹数据,通过矢量叉积法对雷达轨迹数据预处理,建立了基于区间估计的航段拥堵模型,分析了航段一天的拥堵态势.
1 雷达轨迹数据分析与处理
1.1 雷达轨迹数据分析
雷达轨迹数据是由多个航迹构成,而一条完整的航迹是由若干个航迹段组成,而每个航迹段又是由单个孤立的航迹点构成.从集合的角度看一条航迹表现形式为:TD={TR1,TR2,…,TRi,…,TRn},其中TD为一条完整的航迹,TRi为第i个航迹段,共有n个航迹段.TR为某一个航迹段,TR={p1,p2,…,pi,…,pm},pi表示该航迹段的第i个航迹点;该条航迹段由m个航迹点组成,这m个航迹点按照时间序列依次排列,见图1,由于航迹段长度不同航迹点的个数也不相同.p={t,la,l0,h,f,v};该式表示某一个航迹点p是由以下六种航行元素定义的:t为航空器位于该点的时间,la为该点的纬度,l0为该点的经度,h为高度,f为航向,V为航空器的速度.
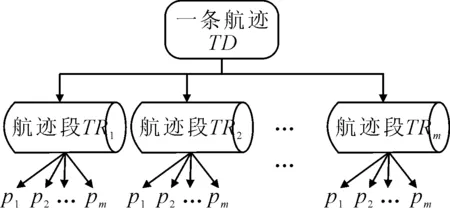
图1 雷达轨迹数据分析图
因此,每条雷达轨迹都可以根据航路点对其划分航迹段,航迹段是分析航路网拥堵的基础,航迹段由若干个航迹点组成,航迹点又包含航空器航行的多个元素,并且每个航迹点的时间间隔为雷达波束的扫描间隔即4 s.
1.2 雷达轨迹数据处理
雷达轨迹的处理主要包括两部分:①预处理,获取规范化的完整雷达轨迹数据并对高度范围进行截取;②航迹点的提取,获取航段的有效航迹点为计算航空器的飞行时间做铺垫.
雷达轨迹数据预处理主要目的是将日志形式的雷达轨迹数据转化为完整有效的雷达轨迹数据,其具体步骤如下.
步骤1用Python对日志形式的雷达轨迹数据进行规范化处理,以期得到规整的csv格式文件.
步骤2由于雷达轨迹数据常含有数据不全等问题,即雷达轨迹数据中常含有噪声和错误数据,常见的错误类型有数据点过少及数据缺失.因此,保留单条航迹TDi中包含500个以上航迹点且任意相邻两点之间的时间间隔不超过40 s的雷达轨迹数据,即不选取雷达信息丢失较多的雷达轨迹.
步骤3由于本文研究的是终端区航路网中航段的拥堵分析,因此,截取6 km以上的雷达轨迹数据.
由预处理的雷达轨迹数据可知,预处理后的雷达轨迹均为航路飞行的实际雷达轨迹,而本文分析的是航路网中航段的拥堵,即要获取实际飞越航段的雷达轨迹数据.然而航空器在航路网中实际飞行的轨迹并不完全与航路重合,为了确定航段的实际航迹点数据,根据《中华人民共和国飞行基本规则》第十五条规定航路的宽度为20 km,其中心线两侧各10 km,所以过航路点作边长为20 km的正方形区域作为航段雷达轨迹的截取区域,即当单条航迹TDi在航路点构成的截取区域内均有不定数量的航迹点时,那么这条TDi是飞越该航段的航迹,见图2.
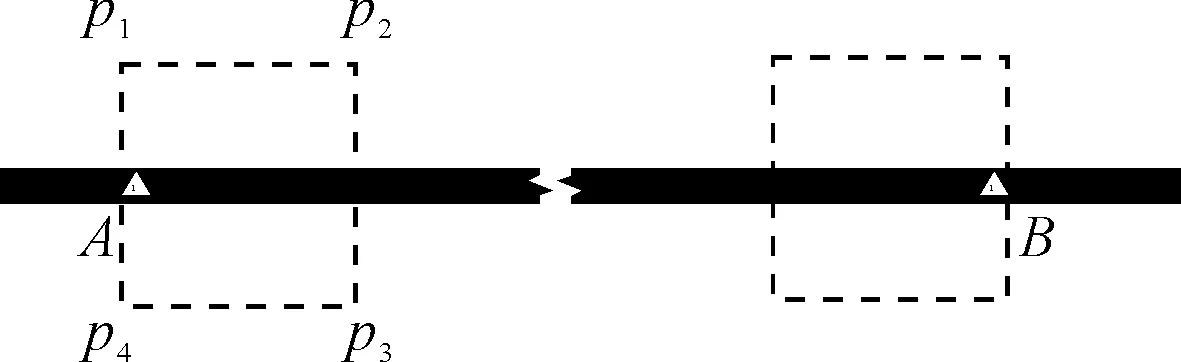
图2 雷达轨迹的截取区域
A和B为航路点,组成的封闭图形为虚拟航路区域.若两航路点所形成的两个截取区域同时包含单条航迹的航迹点时,那么越靠近航路点两端的两个航迹点为该航迹进入航段的起点和终点.
为了提取单条航迹TDi同时经过航路点构成的截取区域的有效航迹点,提出用矢量叉积的方法提取航段的有效航迹点数据.基于上述说明,由航图可知航路点的经纬度,以及直角坐标系的基准点经纬度,根据高斯-克里格投影法,可以求得航路点对应的直角坐标值,进而p1,p2,p3,p4对应的坐标值也可以求得.如果截取区域各个顶点顺时针表示为Pi,其中i=1,2,3,4,根据矢量叉积的定义,两矢量夹角大于0°、小于180°,其值大于零.将截取区域的各个顶点与所求航迹点P组成矢量,与每条边的矢量做叉积pip×pipi+1(当i=4时,取pi+1=p1),叉积结果组成集合A,根据矢量叉积的规律判断航迹点与航段截取区域的关系.

根据矢量叉积法可以从海量的雷达轨迹数据中提取出符合航段的有效航迹点,即获取了航段的所有有效航迹点数据,完成航段有效雷达轨迹数据的提取.
2 基于平均飞行时间的航段拥堵模型
文中用平均飞行时间来表征航段的拥堵,而航段的平均飞行时间并不明确.为了确定航段的平均飞行时间,假设飞越航段的飞行时间总体是服从正态分布.
获取了航段的所有有效航迹点数据,根据航路点确定的正方形区域内的起点和终点的航迹点的时间差可求得单条航迹TDi的飞行时间.由于区间估计能根据一定的正确度与精确度的要求,构造出适当的区间,以作为总体的分布参数的真值所在范围的估计.因此,为了获得航段的平均飞行时间,采用区间估计的方法来确定航段的平均飞行时间.因此,假设获得N个飞越航段A的飞行时间样本X,由于飞行时间方差未知,所以用样本的方差S2代替总体方差σ,有:
在对改性沥青新材料进行制备之前,最为关键的一个步骤就是要进行原材料的准备工作,原材料可以划分为三种,细集料、粗集料以及填充料。在对粗集料进行收集的时候,要对大石料进行破碎。为了能够有效的提升沥青材料的粘附力,在进行石料破碎的时候,要选择最为恰当的方式,以此来保证破碎面能够符合要求。在对细集料进行选择的时候,采取的最为普遍的方式就是运用天然砂石以及人工砂石,从而保证它的纯度。在填充料的选取中主要是使用亲水系数小于1的憎水性石料,确保它的干燥度、清洁度等因素,精细度要符合专业标准。
(1)

(2)
对并且右边参数t(n-1)不依赖于任何参数,可得
(3)
由此得到置信水平为1-α的平均飞行时间置信区间为
(4)

(5)
由区间估计可得航段总体平均飞行时间区间,进而当航空器在航路飞行经过该航段飞行时间不在该平均飞行时间区间内时,则航路网中该航段要么拥堵要么畅通,即大于总体平均飞行时间为该航段此刻处于拥堵,反之为畅通.当属于该区间内时此刻航段处于正常运行.
3 算例验证
3.1 航段飞行时间计算
采用云南管制2019年12月5—18日的雷达轨迹数据,由管制员经验判断,选取云南往北方向终端区内较繁忙航路G212航路中的XFA-MEBNA航段进行拥堵分析.利用Python对雷达轨迹数据进行预处理,确定航路点XFA和MEBNA的截取区域,运用矢量叉积的方法从大量的雷达轨迹数据中提取出同时飞越航路点XFA和MEBNA的航迹点数据,见图3,为1 d同时飞越航路点XFA和MEBNA的航迹点.
两个正方形-航路点的截取区域,两个正方形内颜色相同的点-同一条航迹数据的航迹点.
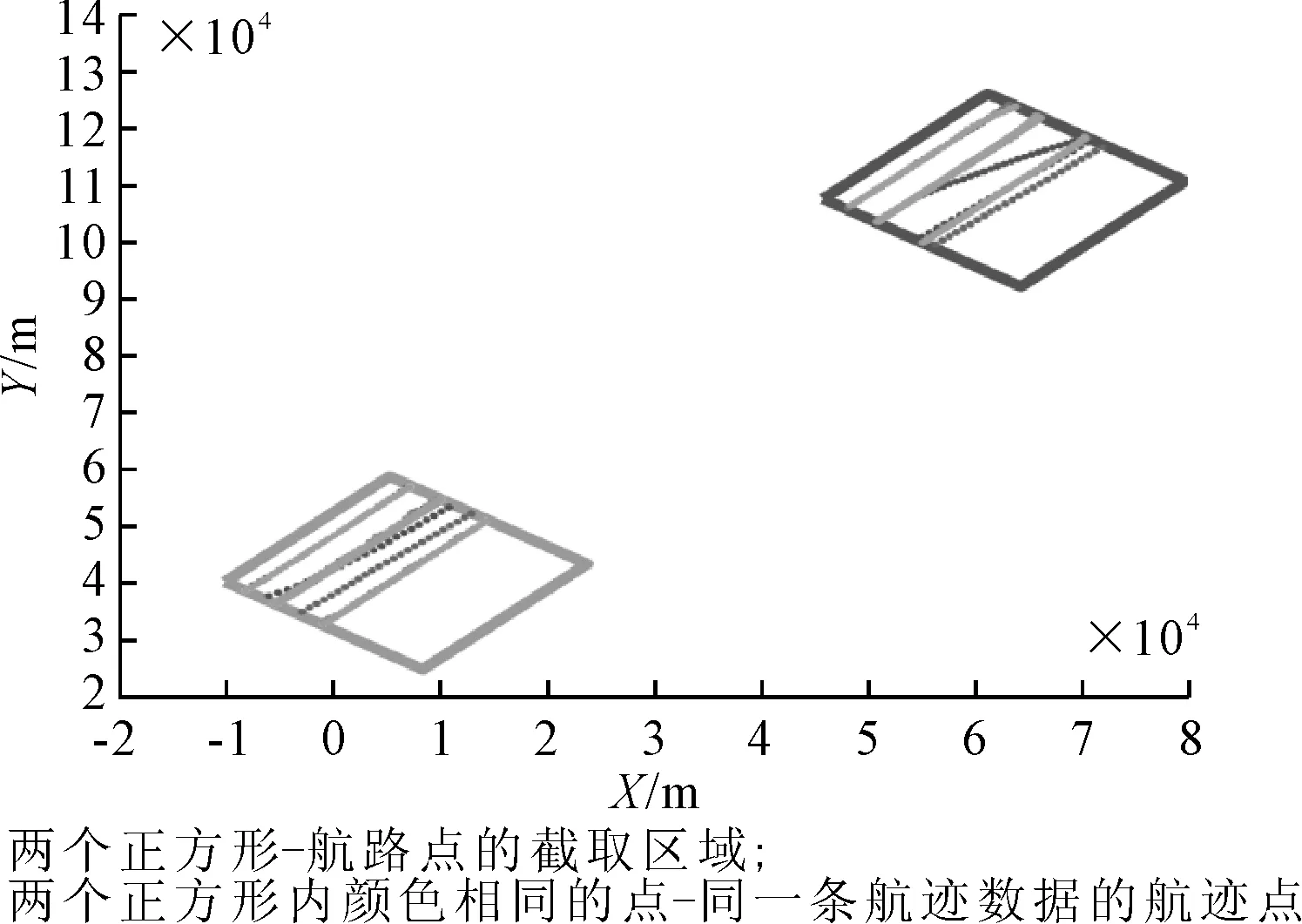
图3 飞越航段的航迹点

图4 样本数据
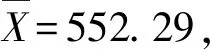
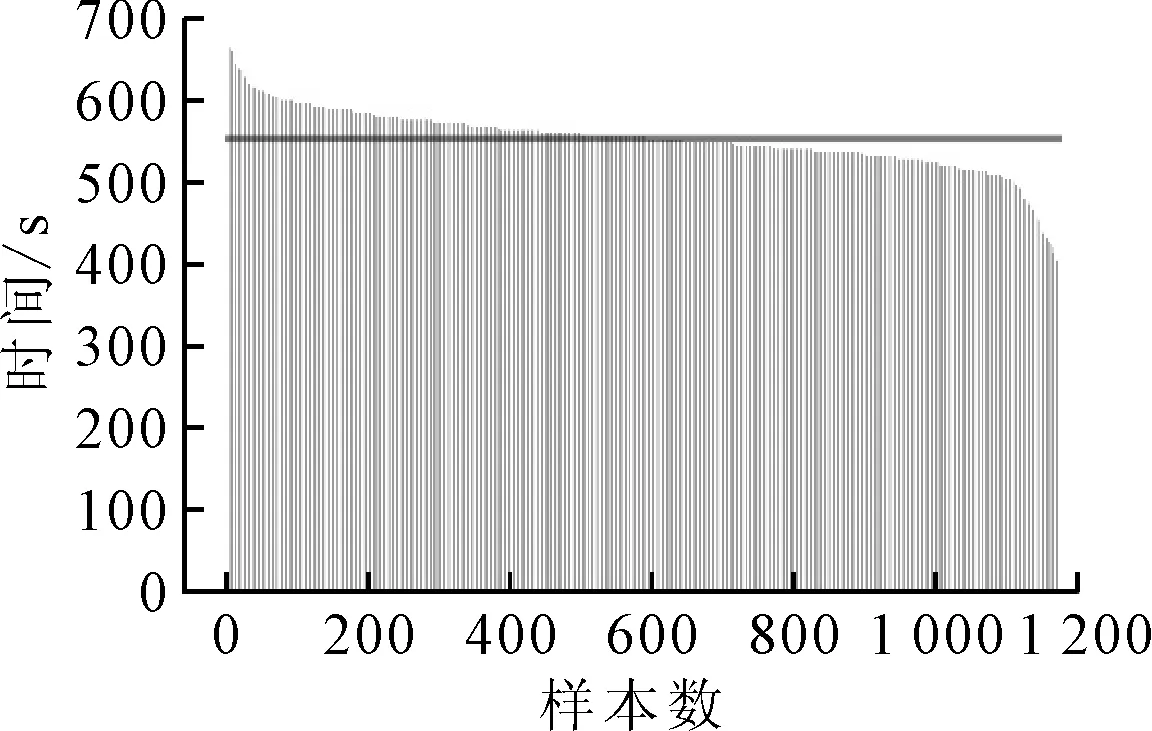
图5 区间估计后的样本数据

3.2 计算结果分析
运用上述平均飞行时间结果对航段XFA-MEBNA上的2019年12月19日整天的拥堵态势进行分析.将其1 d的运行情况划分48个时段,且每30 min为一个状态时段,见表1.

表1 航段飞行时间
航空器飞越航段XFA-MEBNA 1d的拥堵态势,见图6.
图6 拥堵态势
由图6可知,航段XFA-MEBNA这1 d中在05:00—06:30和14:00—15:30内都产生了拥堵,其中18:00—23:30时间段内的拥堵持续时间最久.
4 结 论
1) 针对空中交通航路网中流量的增加、航路网容流不匹配、航路规划不合理等问题.本文基于航路网交通拥堵的表现形式和实际运行情况,提出用平均飞行时间表征航段拥堵.
2) 针对获取的雷达轨迹数据杂且乱,本文实现了对雷达轨迹数据的分析与处理,并提出用矢量叉积法提取航路网中航段的有效航迹点,据根据矢量叉积的结果用飞入航路点的第一个雷达轨迹点作为飞越航段的起点,用飞出航路点的最后一个雷达轨迹点作为飞越航段的终点,用两者之差作为航空器飞越航段的飞行时间.
3) 本文构建了基于区间估计的航段拥堵模型,能有效实时的评价空域航路网中航段的拥堵情况,为管制员了解空域拥堵态势提供了有力依据,比传统的主观评估的优点在于实时性和客观性,同时对提高航班的运行效率具有重大意义.
由于本文虽然采用的是雷达管制数据,而雷达管制下由于管制员管制手段、精神状态的不同都会对航迹产生较大的影响,因此忽略了人为因素对航路拥堵的影响.而在未来的工作中,可以将人为因素纳入对拥堵分析的考虑范围.
猜你喜欢
计算机应用与软件(2021年6期)2021-06-21
火力与指挥控制(2020年2期)2020-04-02
导航定位与授时(2020年1期)2020-02-18
电子技术与软件工程(2020年7期)2020-02-05
弹道学报(2019年4期)2020-01-10
航空工程进展(2019年5期)2019-11-05
环球飞行(2018年7期)2018-06-27
科学与财富(2016年27期)2017-03-24
商(2016年28期)2016-10-27
大社会(2016年5期)2016-05-04