
基于人工蜂群算法的多路半桥均衡电路*
2022-09-07 12:52:18李一凡
计算机时代 2022年9期
李一凡,夏 鲲,袁 印
(上海理工大学机械工程学院,上海 200093)
0 引言
发光二极管(Light emitting diode,LED)具有环保、节能、寿命长等优点,在屏幕显示领域有广泛应用。P2 全彩LED 单元板更是出现在生活中的方方面面,由于LED 的动态电阻很小,当LED 的电压有很小的波动时,其电流会有很大变化。
单块LED 板不能满足多场合的需求,通常将多块LED 板通过串并联方式接在一起满足实际需求,由于负载变化很快,不均压的工况是随机产生的,简单地将它们串并联在一起会产生电路电压不均衡的问题。目前的均衡电路适用于规律性不均衡的传统电池均压场合,但无法满足LED 应用场合下快速变化的均压需求,因此设计多路均衡输出系统,保证LED能够在负载变换最恶劣的工作状况下系统效率达到最高很有必要。
目前,多路输出系统大多采用反激式结构,文献[5]中反激变换只能精确控制其中某个绕组,不能对主绕组以外的绕组电压精确控制,系统结构会受到电路寄生参数的影响。多路绕组的存在,使得系统的输出调整频率差,无反馈的一路输出精度低,影响系统的正常使用。文献[6]采用类似半桥结构输出的系统控制方案,每时刻只有一路开关管导通,其他路处在二极管续流模式下,在负载快速变化的场合精度控制不准确,均衡效果差。文献[7]提出PWM 开关电源型输出和芯片闭环控制解决方案,可有效地解决因负载环境快速变化而产生的电压不均衡的问题,但存在器件成本高昂,优化结构不唯一,采样目标路数较少的问题。对于多目标群体优化的方案,文献[8]对比不同进化算法,发现人工蜂群算法能在不受搜索空间限制且不需其他辅助信息的情况下,具有参数设置少、收敛速度快且精度高的优点,更适用于解决多路电压均衡方案。
综合上述问题,本文提出一种基于人工蜂群算法的多路半桥均衡电路。①该多路半桥拓扑使用更少的开关管和其他电子元件,降低成本。②采用新的控制方法,即正常情况下同一时间只有一个开关制管关断,且不存在二极管续流,可以通过控PWM 占空比来改变开关管关断时间长短,从而,精确控制各个负载均衡支路的电压,满足随时变化的负载环境需求,使均衡更有目的性。③增加闭环方案,采用人工蜂群算法,采样多路输出电压数据,根据系统不同的负载环境,计算最优多路占空比,进而调节多路输出的电压以保持均衡,在不同功率工况下效率最高。最后,搭建了一台七路半桥均衡输出的实验样机,验证了理论分析的正确性。
1 改进多路半桥均衡电路
1.1 半桥电路结构
如图1 所示,多路半桥均衡电路拓扑由-1 个电感~L和电容~C、个开关、+1个连接点组成,也称为级多路半桥。开关管漏极接总电源正极,源极接开关管漏极,开关管漏极接源极,源极接漏极,以此类推,开关管漏极接源极,源极接开关管总电源负极。通过控制各个MOSFET 关断时间比例改变输出电压比,精准均衡电压。
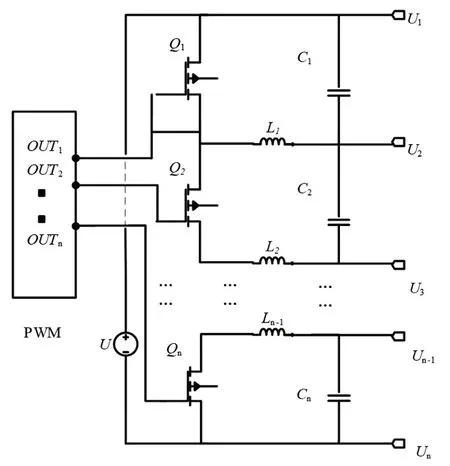
图1 n级多路半桥均衡电路拓扑
当Q导通时,此路输出被短路U=0,其他路正常输出,当Q关断时,第路正常输出,输出与总电源电压关系满足式⑴:

其中,为第路输出电压,为第路开关管占空比,为总电源电压。
1.2 七路半桥建模及工作分析
将脉冲触发器、LED 负载、直流电源与多路半桥拓扑相结合,以七路半桥电路拓扑为基础研究。将每路开关管关断占空比设置为七分之一,即可保证各路输出相等。
以图2 的脉冲波形分析,此时=======/7,每个开关管每一周期导通七分之六周期,关断七分之一周期,且七个开关管不同时关断。
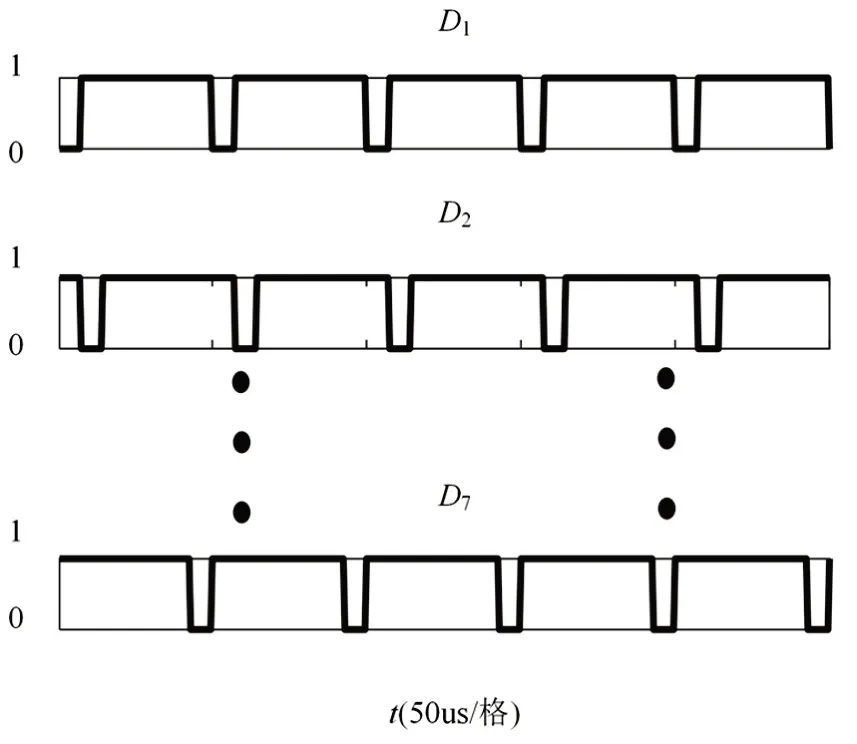
图2 七路脉冲触发期占空比
2 人工蜂群算法的闭环控制电压策略
多路半桥拓扑在负载变化快速且极不稳定的LED 板上会出现不稳定的电压波动,系统整体效率降低,因此需要采用闭环算法控制策略将七路电压作为优化目标。
人工蜂群算法是一种群体智能寻优算法,模拟了蜜蜂的行动模式,应用在函数优化问题中。本文控制策略中计算占空比控制生成的七路电压值与目标电压值差值的标准差,将最小差值的标准差作为目标函数。编码时人工蜂群算法中每只蜜蜂有匹配位置,即与七路变量电压对应,蜜蜂位置为一个七维数组,在占空比为[0,1]的范围内活动迭代。系统采用人工蜂群算法采样七路电压值,通过改变脉冲发生器输出的七路占空比控制七路电压均衡,在各个LED 板工作状况不同的情况下,保证系统的高效性。
人工蜂群算法定义的蜂群划分为引领蜂、跟随蜂和侦察蜂三种蜂落,其中引领蜂和跟随蜂各占蜂群的一半,数量保持与蜜源数量相同,并且每个蜜源同一时间内有且仅有一只引领蜂采蜜。初始化种群后,计算对应的函数值并寻找最优的蜜源,得到蜜源位置更新停滞的次数后便进入引领蜂阶段。设求解问题的维度值为,即占空比的输入,该七路半桥系统中,维度值为6,在次迭代时蜜源的位置:

其中,表示蜂群系统运行时的迭代次数;和代表各自搜索空间的上下限,=1,2…。蜜源的初始位置依照式⑶随机在搜索空间中产生:

在搜索开始时,引领蜂阶段会在蜜源的周围根据式⑷搜索产生一个新的蜜源:

其中,d为[1,D]中的一个随机整数,表示引领蜂随机地选择一维占空比值搜索;∈{1,2,…,NP},其表示在NP 个蜜源中随机找到一个位置不等于的蜜源,是[-1,1]均匀分布的随机数,决定扰动幅度。当新蜜源电压差值的适应度优于变量时,便采取贪婪选择的方法去选择代替。在所有引领蜂的阶段结束后,便飞回信息交流区从而共享蜜源信息。依据蜜源边界取值范围[0,1]从而得到加速系数,更新雇佣蜂位置,存储最佳蜜源,若系统没有更新,则记录系统的停滞次数从而更新累积并重新选择概率,按式⑸计算概率跟随。

随后跟随蜂便采用轮盘赌的方式去选择引领蜂,即[0,1]产生均匀分布的随机数,如果其大于随机数,则跟随蜂会在蜜源的周围产生新蜜源,且采用和引领蜂相同的贪婪选择方法确定蜜源。如果没有找到更好蜜源,系统主动结束,转化成侦察蜂,搜索新的食源。
蜂群寻优系统保留最好蜜源数据,判断新的蜜源、跟随蜂、引领蜂的位置是否达到最大的迭代,如果获取了最佳的各路占空比值,则分割阈值,否则重新获取七路电压值,直到重新达到满足最大和最小电压差的评判值,图3为闭环控制系统流程。
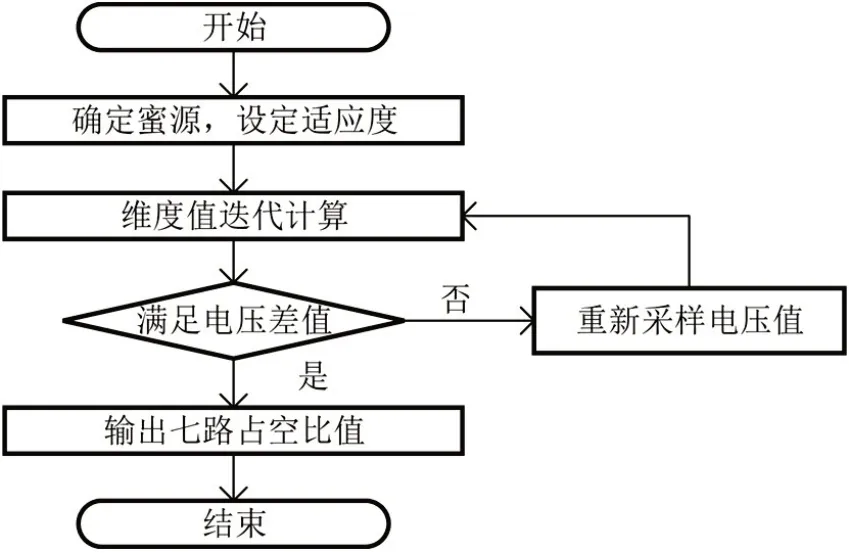
图3 闭环控制系统流程图
当各路LED 工况相同时,每路占空比都为1/7。当工况不同时,七路占空比随人工蜂群算法采样的电压值寻找最优蜜源进而开始迭代,最终各路电压保持一致。
图4 所示,在工况不同的情况下七路的占空比不相同,通过改变占空比的不同而控制电压满足工况效率需求,实现闭环系统的搭建。
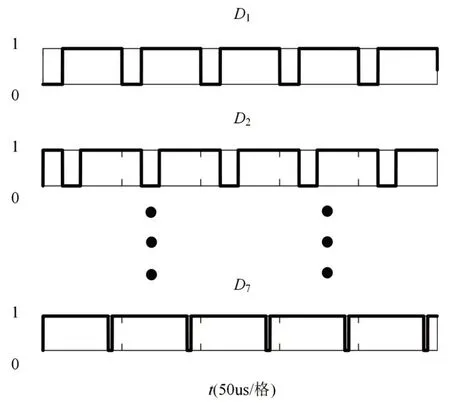
图4 闭环控制下七路脉冲触发期占空比
3 系统仿真实验
3.1 仿真及参数设置
在MATLAB/Simulink 环境下对文中提出的基于多路半桥均衡电路的LED驱动器系统仿真建模如表1。采样七路电压值至脉冲发生器,将引领蜂群的大小设置为50,跟随蜂群的大小设置为50,侦查蜂群的大小设置为5,维度设置为6。
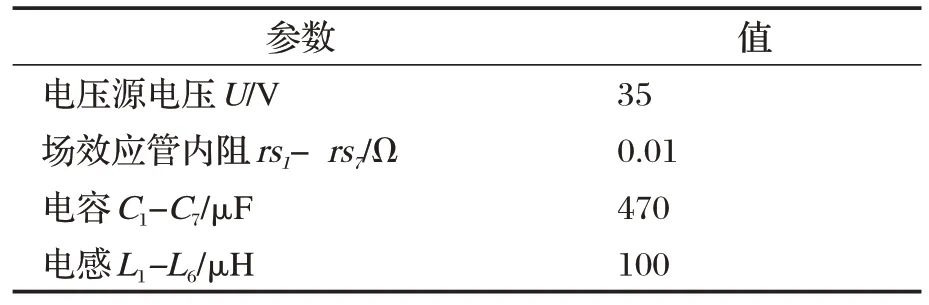
表1 多路半桥均衡电路仿真参数
图5 为系统电压稳定后的值,波形电压围绕设定的七路目标适应度的电压差波动。
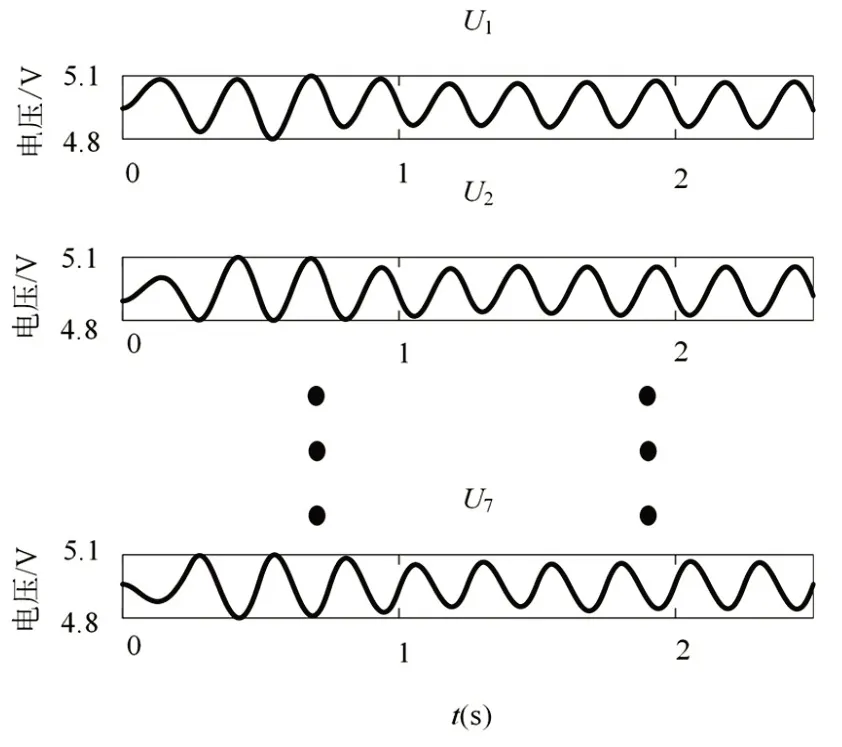
图5 七路半桥驱动器电压仿真波形
图6 为蜂群算法迭代次数,迭代至115 次后电压趋于稳定。每当工况改变,人工蜂群算法会重新迭代找到最优PWM 占空比从而保持电压均衡。通过仿真不同工况模拟该拓扑在闭环和开环下的高效性。PWM输出逻辑:
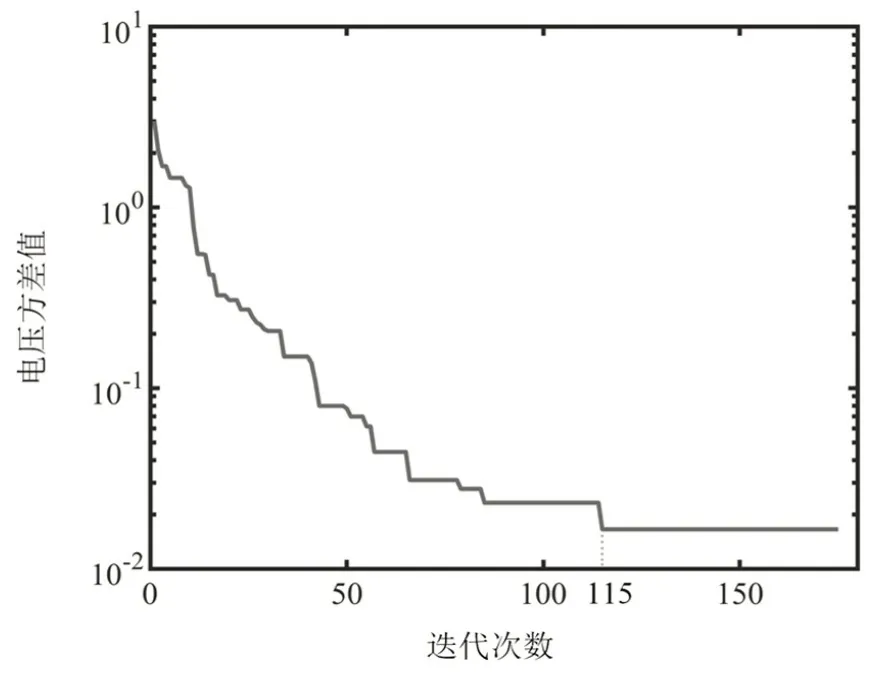
图6 人工蜂群迭代波形

其中,通道数量=7,为七路占空比,-的值为1/(7),与此同时,判断第次时的高低电平采用式⑺比较:

3.2 实验搭建验证
为验证系统的实际运行能力,设计了图7 所示的实验样机。主电路参数如下:直流电源=35V,电解电容=470F,磁环电感=3mH,MOSFET 选用英飞凌IRF540NPBF;控制电路采用dSPACE 半实物仿真的软硬件工作平台;为避免电磁干扰,dSPACE输出控制信号经光纤传输给驱动电路,经由驱动电路控制MOSFET 开关管。该实验平台经济,结构简单且容易搭建。
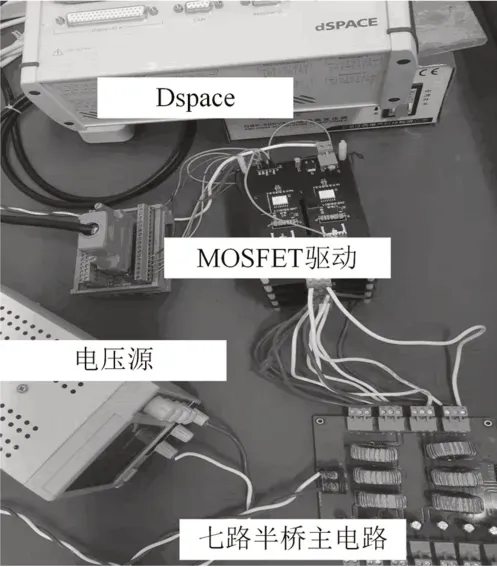
图7 七路半桥驱动器实验平台
该平台测试系统在最恶劣工作状况下开环和闭环的均衡电压状况。最恶劣工作状况即当电路回路路径经过MOSFET 最多时,七路MOSFET 同时构成回路,第二、四、六路全彩LED 显示屏工作出现不稳定的波动状况。
图8为在最恶劣工作状况下七路半桥在开环下波动的最高和最低电压及相应驱动MOSFET 的PWM 波形。=5.2V,=4.4V,该拓扑在开环下最恶劣工况中的电压会出现较大波动。
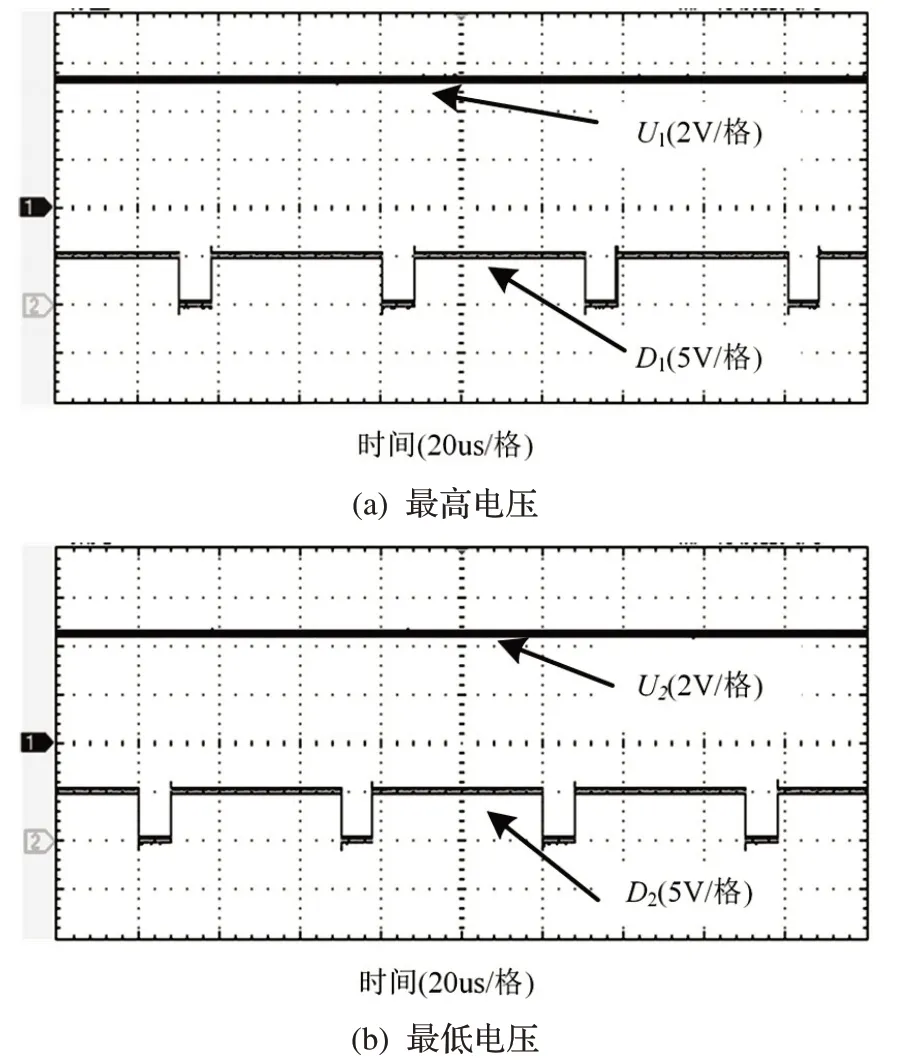
图8 开环中恶劣工况下的电压及驱动波形
图9为最恶劣工作状况下七路半桥在人工蜂群控制下的闭环波动的最高和最低电压及相应驱动MOSFET 的PWM 波形。=5.0V,=5.0V。在闭环控制下七路电压在占空比改变控制下都均衡在5V。
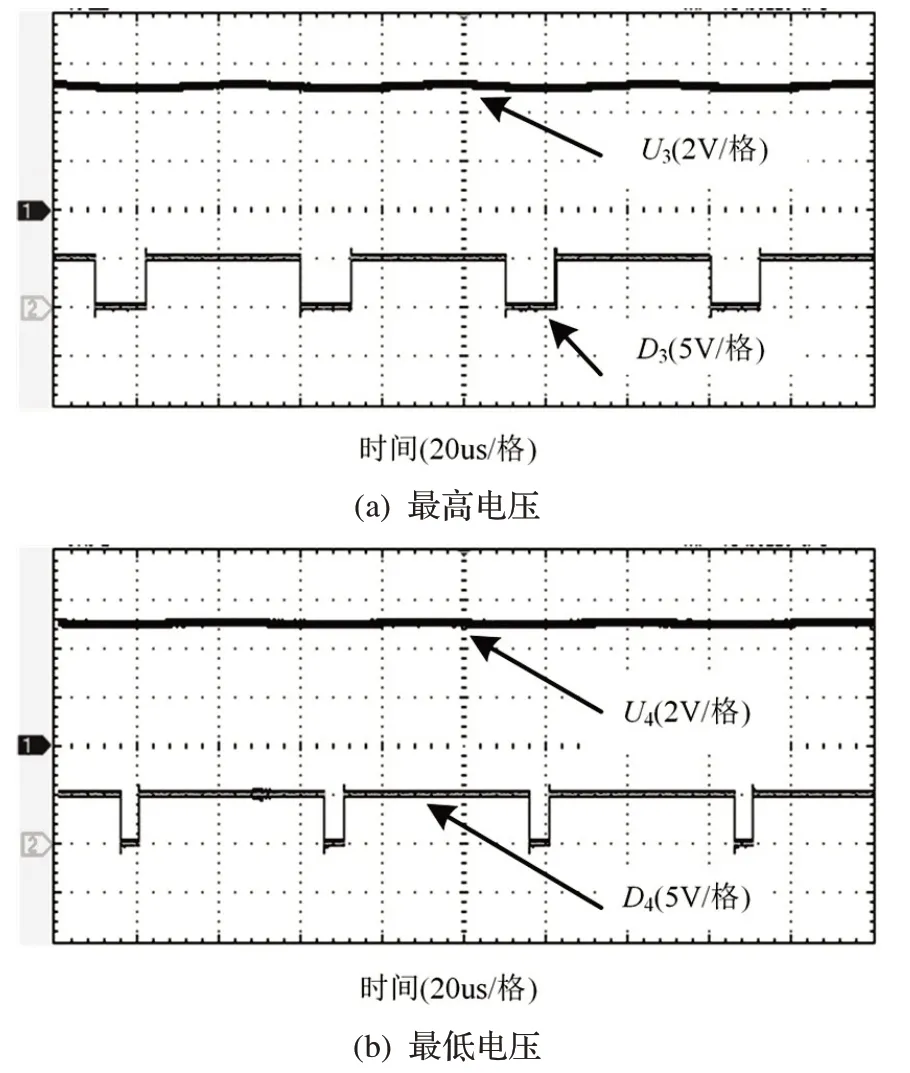
图9 闭环中恶劣工况下的电压及驱动波形
根据以上波形数据可知,采用人工蜂群算法控制的闭环拓扑能够保持系统电压的稳定,减少了由于电压波动过大所导致的LED负载不必要的电路损耗。
3.3 功率的高效性
验证时选取系统工作状况最恶劣、工作状况最优即七路LED 显示相同的环境和常规工况即七路LED在亮度变换较小的环境研究对比,结果图10所示。
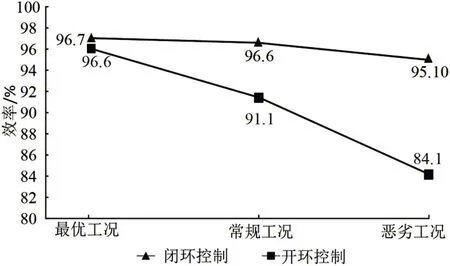
图10 不同工况下的效率对比
实验结果表明,本文提出的拓扑在常规工况下能够实现高效运行,且在负载环境多变的恶劣工况下闭环控制仍然可以保持系统的高效性。
4 结论
本文设计了一种基于多路半桥均衡电路的LED驱动器。与传统驱动器相比,该驱动具有以下特征。
⑴改进了常见多路半桥拓扑,使得拓扑简单、直观,开关管及其他元件数量少,保持MOSFET 在系统中状态以导通为主,降低成本,减少系统损耗,极大减少了占用空间。
⑵可任意指定输出路数量,多路之间不会互相干扰,增强了该系统的灵活性和稳定性。
⑶人工蜂群算法的闭环控制系统保证在最恶劣的工作状况下精确控制每路电压,该拓扑电路在提高系统效率上具有优势。
猜你喜欢
贵州科学(2023年6期)2024-01-02 11:31:56
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
林业与生态(2022年5期)2022-05-23 01:16:51
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年11期)2018-08-04 03:25:58
高中生·天天向上(2018年1期)2018-04-14 09:24:38
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
电测与仪表(2015年3期)2015-04-09 11:37:38
系统工程学报(2015年2期)2015-02-28 19:53:43
