
论自动扶梯乘客危险行为识别与预警
——以双目深度图像研究为例
2022-09-06 05:55:22汪伟
佳木斯职业学院学报 2022年9期
汪 伟
(淮北职业技术学院,安徽 淮北 235000)
随着电梯事故问题发生次数的增多,引起人们对电梯安全管理的深切关注。在分析电梯事故时,发现事故类型主要有两种,一是电梯运行处于故障状态,二是乘梯人员的危险行为。在两类事故中,乘梯人员危险行为引发的电梯事故,在整体电梯事故中的占比有增长趋势。因此,以双目深度图像技术为视角,深入探索乘客在扶梯危险行为表现特点,对其进行有效识别与预警,保障社会稳定与安全。
一、自动扶梯乘客常见危险行为
自动扶梯乘客的常见危险行为,主要体现在以下方面:一是乘坐扶梯的过程中,乘客可能出现将头部以及双手伸出装置外的情况,此时,如扶梯外存在障碍物,则极容易导致风险出现,威胁乘客健康。二是乘坐扶梯期间,乘客如存在鞋带松散的情况,或服饰与地面接触,则容易导致服饰被卷入扶梯的缝隙中,致使风险发生。三是部分乘客在乘坐扶梯期间,容易出现反方向站立的情况。一旦扶梯意外停止,或扶梯已经运行至尽头,则会导致乘客出现跌倒的风险,严重威胁其人身安全。四是部分乘客在扶梯运行至尽头时,双脚不及时离开边缘,在电梯本身无故障并能够正常运行的情况下,上述行为容易导致乘客跌倒。而一位乘客跌倒后,后续乘客下扶梯的过程均会受到阻碍,导致严重的连续事故出现。如电梯本身存在老化等故障,则很容易使乘客从边缘的缝隙处跌落,导致更加严重的安全事故发生。五是低素质或儿童乘客,容易出现在电梯上打闹、嬉戏、蹦跳等行为,上述行为不仅会影响其他乘客的安全,同样属于对自身安全不负责任的表现,务必予以纠正,方可保证乘梯安全[1]。
二、自动扶梯乘客危险行为识别与预警系统的功能需求
自动扶梯运行过程中,管理者难以实现对乘客行为的全天候控制,仅可通过提醒的方式告知乘客预防风险。但仍存在部分人群无视规则,视自身以及他人生命与公共财产于不顾,而做出危险动作。自动扶梯乘客危险行为识别与预警系统,主要针对上述乘客所设计,功能在于及时识别乘客的危险行为,从而预警,便于减少行为所带来的风险。智慧城市以及无人驾驶等技术的出现,标志着智能化领域的发展,已经进入了新的阶段。上述智能化技术,均可实现对事物以及人物的识别。对人物的识别,主要需通过对面部特征的观察而实现。但对人物所处的背景、环境亮度、衣着纹理,以及人物身高等,均存在关注度不足的问题,精确度较低。如将其应用到自动扶梯乘客危险行为识别与预警系统中,则难以满足系统的功能需求。双目深度图像的出现,为上述问题的解决提供了保证,将图像应用到系统的设计过程中,能够另辟蹊径,从新的角度出发,对问题进行解决,实现对扶梯中人物的高精度识别。双目深度图像实现的技术基础,以RGB-D为主,上述技术可实现对人物动作的监控,结合RGB图像、深度信息以及骨架结构等数据,工作人员便可获得详细的乘客行为数据。上述数据一经获取,便可被传输至系统中,而系统则可对数据进行分析与处理,最终明确判断扶梯中乘客的行为是否存在风险[2]。
三、基于双目深度图像的自动扶梯乘客危险行为识别与预警系统的设计与实现
本部分主要以双目深度图像为基础,以提高风险识别质量为目的,对系统的设计与实现方法进行了总结。
(一)行为识别算法
行为识别算法,是有关领域用于对多种行为进行识别所常用的一种算法。根据算法依据的不同,可将其详细分为不同种类,分别为基于兴趣点的行为识别,以及基于深度学习的识别。而后者相关技术发展速度较快,并在多种领域有所应用。技术在应用的过程中,整体水平同样得到了提升。应用后者对扶梯乘客的行为进行识别时,工作人员需要首先基于神经网络技术建立网格,在此基础上,对数据进行收集,并将其与网格相互结合,以数据驱动为途径,通过学习的方式,数据积累量不断加大。最终所形成的数据量,可涵盖大量与乘客危险行为有关的内容。将上述内容应用到危险行为识别过程中,可有效提升识别结果的准确性。通过上述分析可知,以上技术,类似于大数据技术。技术的应用过程中,对数据以及信息的获取,是促使行为识别功能得以实现的基础。除了对人物动作进行识别外,对人体进行识别同样较为重要。在此期间,本文对多种方法进行了对比,双向循环神经网络,在与众多手段进行对比的过程中,呈现出了明显的优势,故本文对此方法进行了应用。上述网络在构建之初,便对人体的骨骼构成信息进行了收集,并基于各个骨骼之间的关系,建立了模型。将其与基于深度学习的行为识别算法相互结合,能够从人体骨骼以及外部动作两方面出发,实现对行为的识别,这对系统识别精确度的提升,具有重要价值。
(二)系统框架设计
本系统构成较为简单,但各个结构之间存在密切联系,各部位需要协同发挥作用,方可最大程度保证行为识别结果准确,提高系统应用的有效性(系统框架见图1)。
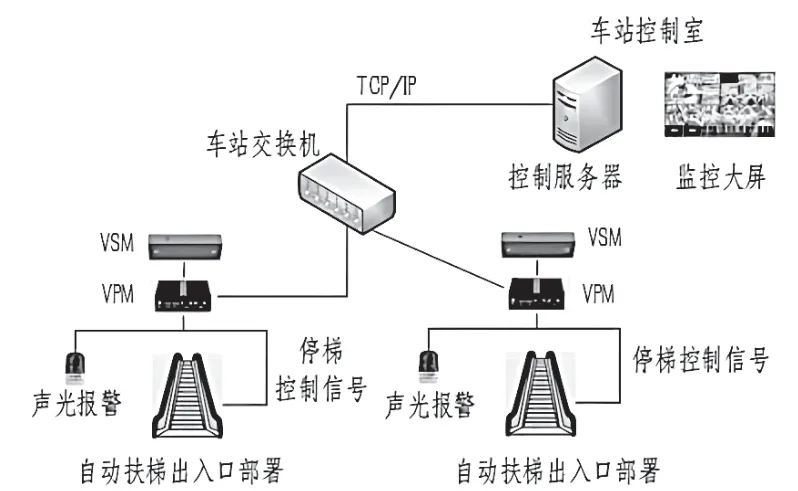
图 1 系统框架
通过图1可以看出,本系统大致由三部分构成,分别为控制室、交换机,以及出入口部署。上述三部分中,每个部分在系统中所发挥的作用不同。具体如下:一是控制室。此部分功能,主要由工作人员对扶梯乘客的行为进行控制,对扶梯的运行状态进行监测,并于扶梯发生报警时,及早收集数据,同时予以处理。控制室主要由两部分构成,分别为监控屏幕、控制服务器。两部分中,控制服务器可起到承上启下的作用,一方面通过交换器,对数据系统所收集的乘客行为信息进行获取,另一方面则在于通过监控屏幕,呈现扶梯运行期间的监控画面,从而帮助工作人员在收到预警后,判断预警是否正确,是否存在系统误报等问题。二是交换机。此部分的功能,在于承上启下,一方面对系统所收集到的数据进行整理与统计,另一方面,则在于将上述数据发送至控制室终端,从而为工作人员提供参考。三是出入口部署。此部分为系统的重点部分,由出口部署以及入口部署两部分构成,两者的部署特点以及构成情况均相同,区别在于分别位于扶梯出口与入口处。出入口部署,由VSM、VPM、声光报警器以及停梯控制信号构成。系统运行的过程中,可经由相关算法,实现对乘客行为的识别,发现危险识别后,可立即发送停梯控制信号,立刻停梯,并通过声光报警,提醒工作人员对故障予以处理[3]。
(三)系统构建方式
对出入口的部署,是本系统设计与实现的关键,同样属于系统构建过程中的重点。系统构建期间,工作人员应确保监控摄像头本身性能良好,且监控范围可覆盖扶梯自上而下的所有区域,避免存在死角。声光报警器,需位于监控设备水平高度以上,以免对监控区域的成像造成影响。本系统中,VSM可发挥重要作用,上述元件的加入,可有效实现对周围环境的感知,结合感知结果,对环境中的信息进行捕捉。模拟实验发现,VSM能够捕捉的环境信息,包括但不限于图像信息,同样可捕捉覆盖区域内的深度信息。获取上述数据后,VSM将立即对数据进行传输,而此时,VPM则需接收信息,并根据接收的结果以及内容,对图像信息的异常情况进行监测。如无异常,则表明乘客无危险行为,可不予理会。反之,如发现异常行为,则需要立即将异常信息传输至声光报警设备,设备将立即处理数据,最终发出声信号或光信号,提醒乘客注意安全。如乘客的不良行为过于严重且恶劣,需要立即发送指令,要求电梯停止运行。本系统具有边缘计算的功能,同样可对经过计算所获得的数据进行传输,最终通过处理,选择最具有价值的数据存储在系统中,达到深度学习的目的。鉴于系统具有上述功能,且加入了深度学习算法,故每发生一次风险,系统中便会增加大量相关数据。发生风险时,乘客的衣着、服饰、行为、动作等,均可被记录在系统中。未来,借助上述信息,系统的功能也将进一步完善,行为识别结果的准确性,同样会进一步提升[4]。
(四)行为识别过程
对乘客危险行为进行识别的过程,即为双目深度成像算法本身的实现过程,具体行为识别过程见图2。

图 2 行为识别过程
通过图2可以看出,对乘客行为进行识别的过程,需自对传感器的应用出发而实现。本系统需要依赖双目深度图像算法而实现,因此所用传感器同样应为双面深层传感器。上述传感器,与算法互相结合而使用,可有效改善系统功能,提升其性能。系统中,传感器的功能,主要在于对信息与数据进行收集,虽不具备获取图像信息的功能,但具备录入以及输出功能。获取信息后,传感器可将其转化为RGB-D图像,并以上述形式,将数据发送至系统中,实现RGB-D目标追踪。所谓目标追踪的过程,指的是将乘客按照个体划分为不同目标,并单独对各个目标自进入扶梯至下扶梯期间的行为以及路线进行追踪的过程。在追踪期间,系统同样可实现对目标的分类,继而按照类别,对其行为进行分析。结合深度学习的结果,以及所获得的数据,系统可将数据库中所收集的信息,与本次所获得的信息进行对比。如本次存在与风险信息相匹配行为的乘客,扶梯将会立即对人体姿态进行重新估计,最终判断此乘客是否存在危险行为。如存在上述行为,系统将立即通过预警、停梯等方式,实现对风险的处理,减少危害[5]。
(五)行人高度测量
扶梯的设计,目的在于减轻由人力上下楼梯所带来的体力的消耗,从而提高居民出行的便利性。可见,扶梯属于代替步行梯的设施之一。扶梯使用的过程中,乘客本身所处的最高水平面会随其运行高度的变化而发生一定改变。如未将上述因素纳入危险行为识别的范围内,极容易导致最终的识别结果出现误差。考虑到上述问题,本文设置了行人高度测量模块,将其加入系统之中。系统运行后,此模块可立即发挥作用,实现对行人高度的检测。将检测的结果,与经双目深度传感器以及相关算法所获得的信息相结合,最终的测量结果便可呈现。
(六)系统应用实验及结果
为判断本文基于双目深度图像所建立的系统,是否具有识别扶梯乘客危险行为的功能,同时,评价其识别结果的准确性,本文于系统设计完成后,展开了相关实验。
实验具体过程如下:一是经由某地铁自动扶梯相关控制管理部门,获取扶梯乘客资料,以及乘坐扶梯时的影像资料。本次所获取的影像资料,应包含一部分乘客危险行为影像。二是将影像资料输入本文所设计的系统中,运行系统,观察是否可一一识别危险行为所在,同时,观察系统识别危险行为后,是否能够发送预警指令以及停梯指令,从而实现对系统应急处理能力的判断。实验结果见表1。
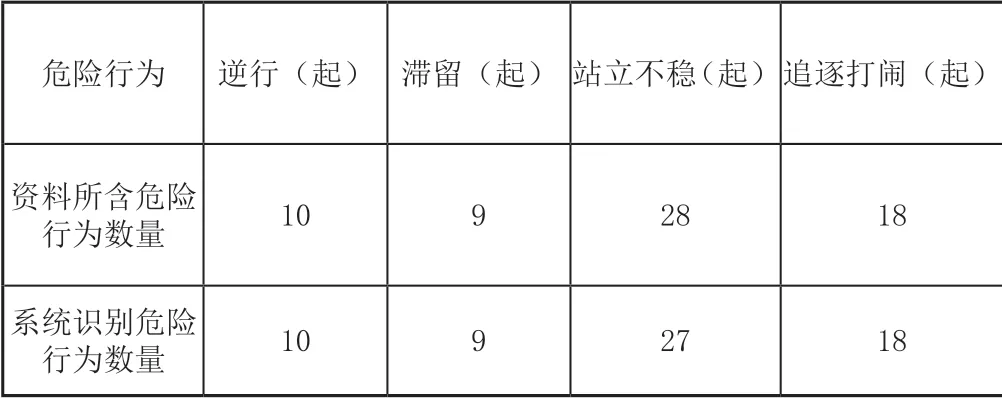
表 1 系统功能实验结果
通过表1可以看出,实验实际所获取的资料中,乘客发生逆行10起,滞留9起,站立不稳27起,追逐打闹18起。经过系统识别,除1起站立不稳未发现外,其余风险均准确识别。由此可见,本文所设计的系统,在识别扶梯乘客危险行为方面,具有一定的应用价值。
四、结语
综上所述,本文以双目深度图像为基础,借助相应算法所建立的自动扶梯乘客危险行为识别与预警系统,具有良好的安全性,可有效识别乘客的危险行为,并根据其行为作出反馈,为乘客的安全保驾护航。未来,随着大型商场等基础设施数量的增加,自动扶梯的数量也将不断上升。由此,可将本系统推广应用到扶梯的设计中,改善设计效果,减少乘客乘坐扶梯过程中多种意外发生的风险,使扶梯设计呈现出智能化以及人文化的特征。
猜你喜欢
思维与智慧·上半月(2022年4期)2022-04-08 21:24:29
中学生数理化·八年级物理人教版(2022年3期)2022-03-16 05:55:10
小聪仔(幼儿版)(2020年12期)2020-02-01 07:08:46
中国特种设备安全(2019年3期)2019-04-22 05:05:32
小学生必读(中年级版)(2019年6期)2019-01-11 09:17:14
今日农业(2019年16期)2019-01-03 11:39:20
中国特种设备安全(2018年10期)2018-12-18 02:17:08
数学小灵通(1-2年级)(2016年3期)2016-11-15 08:56:16
公民与法治(2016年2期)2016-05-17 04:08:24
好孩子画报(2016年6期)2016-05-14 09:54:26
