
数字技术在中心城区道路基坑施工中的应用
2022-09-06 08:10:02李冀清
建筑施工 2022年6期
李冀清
1. 上海市机械施工集团有限公司 上海 200072;
2. 上海面向典型建筑应用机器人工程技术研究中心 上海 200072
1 工程概况
1.1 项目概况
武宁路快速化改建工程位于上海市普陀区,武宁路现状交通繁忙,两侧建筑物密集,地下管线较多,环境复杂,对既有设施的保护要求高。该工程西起中环线真北路立交东侧,向东穿越内环高架路后至东新路,全长约3.5 km,其中明挖地道主线长2.86 km,采用明挖隧道形式,自西向东依次下穿大渡河路、兰溪路、曹杨路、中山北路等交叉口。
1.2 基坑概况
武宁路A23基坑位于兰溪路和武宁路交叉口。A23基坑围护结构采用厚800 mm地下连续墙,槽深28.95 m,φ1 000 mm立柱桩的桩长42 m,坑内加固采用高压旋喷桩裙边加抽条的形式,基坑开挖深度15 m,设置4道支撑,第1道采用混凝土支撑(800 mm×800 mm支撑、1 000 mm×1 000 mm圈梁),其余3道采用φ609 mm钢支撑。
1.3 施工难点
1)既有建筑物距离基坑较近。武宁路规划道路红线为50 m,A23基坑西北侧43.5 m处为第一酒市,西南侧32.8 m处为真如一村居民楼,东北侧17.7 m处为兰溪公寓,东南侧9.8 m处为北岭园居民楼。东南侧既有建筑物在2倍开挖深度内,需要重点监测。
2)既有地下市政管线复杂。武宁路路面下排布有各大管线,周边存在管线种类较齐全,地道施工,将管线空间压缩得较小,导致管线均距离基坑较近,施工过程中基坑两侧的路灯、污水、雨水、燃气、给水、电力、信息(非开挖)等管线,除了部分搬迁管线外,还需做好保护工作,维持居民的生活使用(图1)。

图1 兰溪路A22、A23基坑与市政管线的关系
3)交通组织难度大,施工场地狭小。由于武宁路施工断面较小,根据实施线位置,断面宽度50 m,需满足8根机动车道+2根人行通道的正常运行(约32 m),因此施工可用空间不足18 m,基坑宽度13 m,致使基坑南北方向基本无施工通道。
针对上述难点,该工程采用数字化技术辅助项目施工方案的制定和实施。
2 基于BIM的施工筹划模拟
2.1 施工初步策划
由于需要保证武宁路东西向交通,A23基坑将在围护施工阶段进行分阶段施工,第1阶段先施工A23北侧围护(图2中1),道路翻交后进行第2阶段南侧围护施工(图2中2),最后基坑进行整体开挖和结构施工,待A23基坑完成,实施左侧A22基坑(图2中3)。
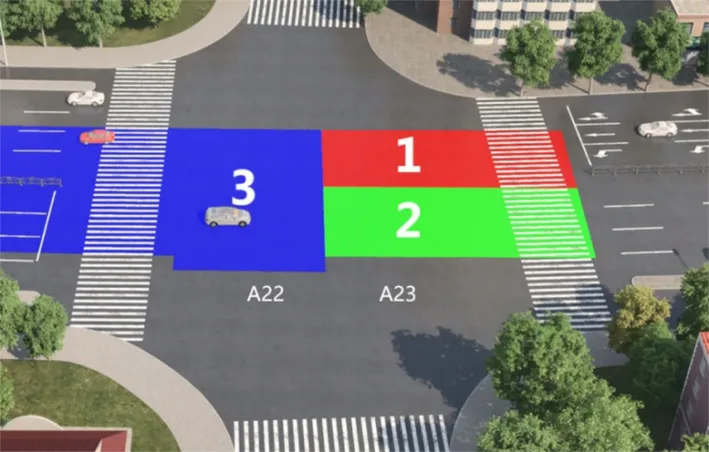
图2 兰溪路A22、A23基坑施工顺序
2.2 交通组织细化
A23北侧基坑施工时,在北侧地下连续墙外预留窨井,并新建雨水管;A23南侧基坑施工时,需将南北雨水管接通,此时需完成既有雨水井的改造工作,因此该阶段的交通组织,需同时考虑兰溪路北侧φ2 400 mm雨水井的改造和南侧基坑施工的交通占道情况(图3)。

图3 兰溪路基坑北侧φ2 400 mm雨水井改造对交通组织的影响
整个路口施工共分为4个阶段,第1阶段施工高压旋喷桩(MJS)对原雨水管进行加固,施工期间路口南向北单向通行;第2阶段施工拉森钢板桩基坑围护,施工期间南向北车道移至围场西侧,同时路口南侧围场向西外扩进行A23节段老管清障;第3阶段施工临封临排钢沉井及排水钢管,施工期间围场东侧区域释放,路口东向南左转机动车由此处通行,同时A23围场回收至第1阶段位置;第4阶段施工雨水井结构,施工期间围场东侧仅留人非通道,路口东向南左转机动车道再调整到围场西侧通行,同时路口南侧围场再次向西外扩进行A23节段围护结构施工(图4)。

图4 兰溪路基坑南侧交通组织4阶段模拟
基于BIM模拟,该工程的交通组织方案保证了基坑施工时,兰溪路南北向的正常通行,武宁路东西向维持始终保持7车道通行,最大可能地保证了道路交通的通畅。同时,通过基坑施工将兰溪路原φ1 500 mm雨水管,改造为东西φ1 800 mm和南北φ2 200 mm雨水管,优化了雨水管网布置。
2.3 基坑施工模拟
根据交通组织筹划,首先施工北侧基坑,包括北侧基坑的槽壁加固和地下连续墙围护施工,坑底立桩施工和旋喷桩加固,首层混凝土支撑,至首层栈桥板施工完成,随后开放北侧交通。
南侧基坑施工时,同样首先进行基坑围护施工,即利用三轴搅拌桩机进行槽壁加固,成槽机地下连续墙施工,钻孔灌注桩施工,并采用高压旋喷桩进行加固。
随后,采用1台反铲挖机和2台小挖机配合施工,反铲挖机先将南坑开挖,后续小挖机配合反铲挖机掏挖北坑栈桥板下以及角落土体。钢支撑安装采用25 t汽车吊配合挖机及栈桥下预留吊钩进行安装,先安装西南角角撑,顺时针安装西北、东北、东南角角撑,最后形成对撑。
在基于BIM模拟的施工过程中,发现在A23基坑的南北两坑施工时,需在基坑内西侧顶部分别预留管线桥,用于通信管线的搬迁。经评估,采用该种施工方式可以节约通信割接2个月时间,即在支撑栈桥节段预留3 m×2 m的U形槽通信管线桥,在基坑开挖过程中即可进行管线割接(图5)。

图5 基于BIM模拟优化基坑开挖中的通信管线的搬迁
A23基坑采用半盖挖法进行施工,南北两侧施工方式相同。首层栈桥板用于施工机械停放和车辆行驶。首先,围护结构养护过程中进行基坑降水,降水完成后将基坑分为4层进行开挖,按照牛腿、钢筋混凝土角撑、钢支撑的顺序,随挖随撑,钢支撑通过先前地下连续墙施工预留的钢板完成和地下连续墙的焊接。当土方开挖至基坑底部,施工底板混凝土垫层,浇筑底板与部分侧墙,待底板混凝土强度达到设计要求值后,拆除第3、第4道钢支撑和角撑,再向上浇筑侧墙和中隔墙。搭设满堂脚手架,施工地道主体结构顶板。地道主体施工完毕后,施工南北向φ2 200 mm雨水管,最后割除第1道混凝土支撑,回填土方恢复交通。顶板预留通风井洞口,待中央绿化带施工时,同步浇筑通风井。
3 基于轴力监测系统保证基坑施工安全
仅通过BIM优化施工组织设计是不够的,在工程实施过程中,由于兰溪路所处的曹杨地块的建筑物建于20世纪八九十年代,建筑物本身有一定的沉降和倾斜,因此采用钢支撑及伺服系统控制基坑的沉降变形。对第2道和第3道支撑,采用单端伺服钢支撑系统,最大设计轴力达到593 kN/m。当轴力损失达到设计值的20%时,须进行轴力补偿。
基坑支撑轴力自动控制系统是采用机电液一体化控制与监控的系统,对支撑轴力进行全天候不间断监测与采集,系统根据传感器所测得的支撑轴力作为反馈,实时动态调控支撑轴力,形成力的闭环伺服系统,有效控制和减少建筑深基坑施工引起的基坑变形,确保地铁生命线等管线的安全[1-4]。
该系统采用了以下技术:
1)液压控制技术。油泵从油箱吸油后向系统供油,通过比例溢流阀调压,经电磁换向阀切换油路,千斤顶作为执行器。电磁换向阀中位可无内泄保压,系统运行时,油泵为间歇性工作。
2)集散控制技术(DCS)。实施基于现场网络的分散控制和集中管理。分散控制包括:各工作站自行检测、调控各支撑的轴力;各工作站自行检测故障和异常情况,自动报警并执行安全措施。集中管理包括:集中设置、管理整个系统和各工作站的性能参数、控制参数;统一管理各工作站的运行,正常运行时封锁各工作站的操作界面,确保安全;特殊情况下,在总控站对部分指定工作站进行调整;集中采集各工作站施工数据,可以进行统计分析,也可进行远程传输、异地监控。
3)支撑轴力调控技术。支撑首次安装后处于空载状态,先进行预撑,将支撑顶紧基坑,预撑压力按支撑轴力设定值的百分比设置。支撑预撑后检查支撑状态,通过检查后,进行支撑加载,使支撑轴力达到设定值。支撑压力低于轴力设定值的偏差下限时,启动泵站,执行支撑轴力欠载调控功能,使支撑压力恢复到设定值。支撑压力高于轴力设定值的偏差上限时,启动泵站,执行支撑轴力超载调控功能,使支撑压力恢复到设定值。支撑轴力调控到位后,关停泵站,支撑压力以液压锁保持。
为确保基坑施工的安全,在建立伺服轴力预警机制的基础上,还同步建立了变形预警机制。设置以下3个风险层级,提醒项目部进行风险管理。
1)正常:无变形异常加速,变形特征曲线趋于收敛。
2)预警二级:变形异常加速,变形特征曲线无收敛迹象,日均变形速率差值连续2 d大于2 mm/d。
3)预警一级:变形异常加速,变形特征曲线无收敛迹象,日均变形速率差值连续3 d大于2 mm/d。
4 结语
武宁路快速化改建工程是上海市快速路系统规划“一横三环+十字九射”布局形态中的一“射”,也是上海西部中心城的一条重要射线快速通道,更是衔接G2京沪高速公路入城段的一条内外交通转换的重要通道。该工程的进度和质量管理不言而喻,但同时还需最大限度地保证居民生活和出行不受影响。基于BIM和轴力监测系统等数字技术的应用,不仅优化了工程施工组织设计,确保了有序施工和按期完工,而且更容易得到相关审批部门和附近居民的理解,助推工程建设顺利实施。
数字化技术的不断应用,使中心城区市政工程施工组织和施工过程的精细化管理成为可能,并进一步增强了中心城区城市更新建设的可操作性。
猜你喜欢
星星·散文诗(2023年29期)2023-11-08 21:36:39
科教新报(2022年5期)2022-02-28 09:06:45
湖北农机化(2021年7期)2021-12-07 17:18:46
工程与建设(2021年4期)2021-10-22 09:49:22
纺织机械(2021年2期)2021-06-04 07:57:54
当代陕西(2019年9期)2019-05-20 09:47:16
建筑机械化(2018年1期)2018-05-25 01:00:05
自动化仪表(2015年5期)2015-06-15 19:01:34
汽车维修与保养(2015年6期)2015-04-17 03:31:40
质量技术监督研究(2015年1期)2015-04-09 06:42:12
