基于图像处理的平面-球面液桥力检测
2022-09-06 13:16:58刘紫潇范增华
计算机应用与软件 2022年8期
刘紫潇 范增华
(山东理工大学机械工程学院 山东 淄博 255049)
0 引 言
液桥作用下的毛细现象是自然界和工业生产中常见的物理现象,在微观世界下,液桥力的主导作用凸显[1]。近年来,液桥介质的柔顺性作为一种特质用于微操作机器人系统中微构件的拾取、转移,以避免传统机械夹持造成的应力集中[2-3]。因此,为了提高操作进程的有效性,液桥力的检测对微操作进程具有重要的指导意义。
面向平面-球面典型配置下的液桥力求解,文献[4]建立了亚毫米微球-平面配置下的作用模型,通过精确迭代法,求解液桥力,并分析接触角、液桥高度对液桥力的影响规律。文献[5-6]建模分析AFM球形针尖与平面间的粘着作用,基于热力学的Kelvin方程法求解不同湿度下的液桥力,并通过AFM实验测量验证理论模型。文献[7]通过圆弧近似液桥轮廓,求解偏微分的Laplace-Young方程,获取液桥力,并分析了液桥体积、液桥高度和接触角对液桥力的影响规律。文献[8]通过实验测试,分析了球面-平面配置下表面粗糙度对液桥断裂后转移率的影响。针对平面-球面间的液桥力获取,上述方法主要是通过建模理论计算,或者集成传感器实验测量。然而,在实际应用进程中难以匹配微力传感器,其制约着操作进程中液桥力的实时反馈。
数字图像处理广泛应用于生物医学工程、机器人视觉、工业过程检测等领域[9-11],但面向微操作机器人液桥力检测的研究较少。本文研究基于数字图像处理的平面-球面液桥力检测方法,通过图像在线采集和处理可实时获取液桥轮廓,建立液桥作用模型,设计检测进程。基于提取的液桥轮廓,进行曲线拟合求解液桥力,并通过实验测量分析图像处理检测的有效性。
1 液桥模型
图1所示为平面-球面配置下的液桥作用示意图,液桥高度为H,微球对象一方面受到液桥弯月面内外压差ΔP所形成的毛细吸附力,另一方面受到液桥与微球接触线位置处的表面张力。故微球所受到的液桥力F包含内外压差产生的吸附力和表面张力在液桥轴线方向上的分力两部分,如式(1)所示。
F=ΔPA+γlsin(β+θ2)
(1)
式中:A为球面润湿区域的面积;l为液桥润湿区域的周长;γ为液体的表面张力系数;β为球面浸润区域的半圆心角;θ2为球面的接触角。
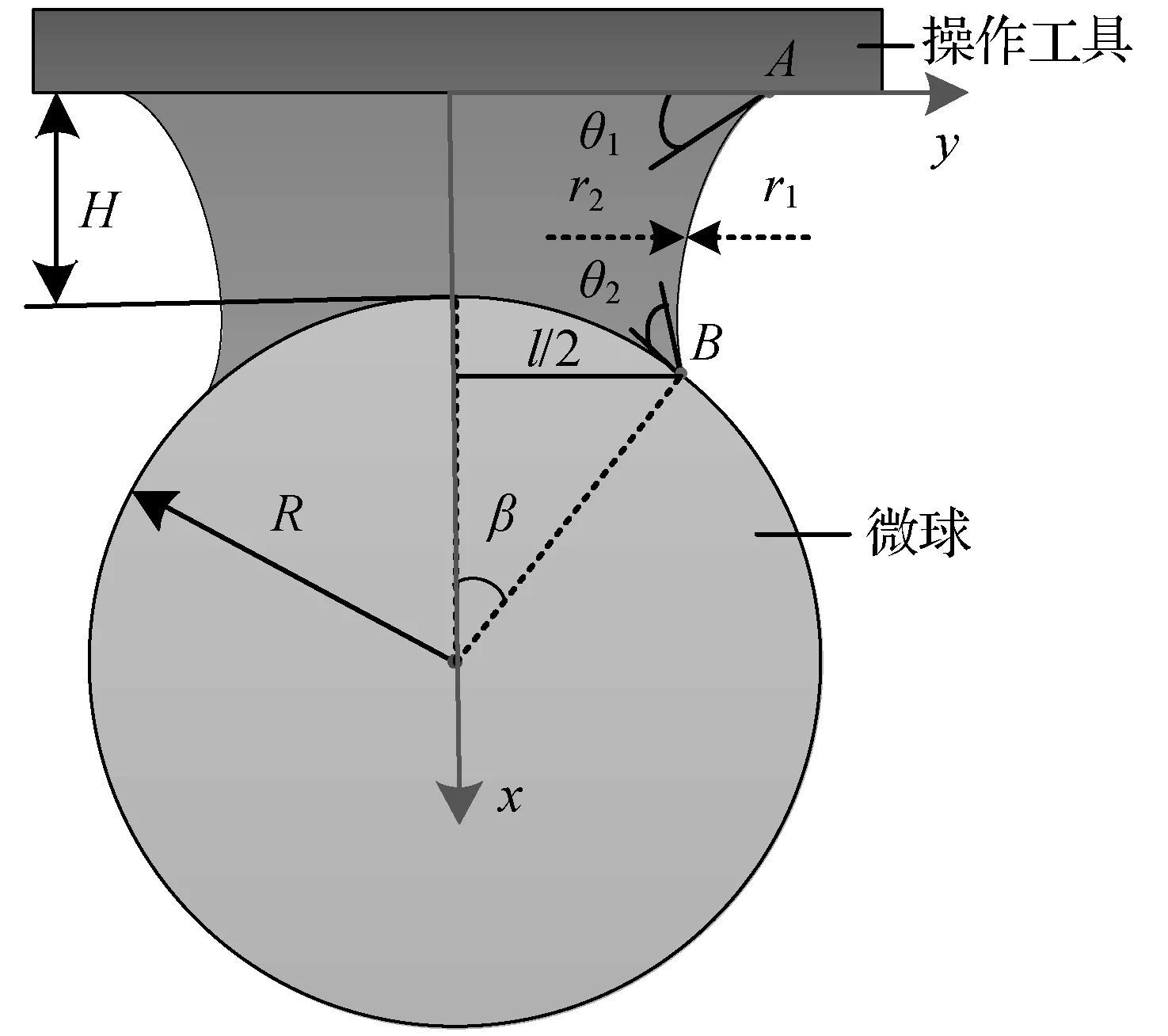
图1 平面-球面液桥模型
基于Young-Laplace方程[12]参数化液桥轮廓,考虑液桥主曲率半径和液桥压差的偏微分Young-Laplace方程如式(2)所示。
(2)
由式(2)可知,基于液桥的轮廓方程,可通过求解偏微分的Young-Laplace方程获取ΔP,代入式(1)即可求解液桥力。因此,液桥轮廓信息是液桥力求解的关键。
2 液桥力检测流程
2.1 检测流程设计
基于图像处理的液桥力检测方法,对采集的液桥图像进行液桥轮廓提取,并拟合求解液桥力。本文设计的基于图像处理的液桥力检测流程如图2所示。首先对操作工具和微球定位,为了提高计算速度,选取特定的图像作为目标液桥的兴趣区域(ROI),进行二值化处理,提取兴趣区域的轮廓。由于液桥ROI的轮廓并非纯液桥,通过角点检测的方法获取轮廓上的角点,作为液桥端点的候选点。以操作工具轮廓、微对象轮廓作为边界条件,获取液桥的上、下端点。通过对上下端点间液桥轮廓的拟合,获取轮廓方程,代入式(1)和式(2)求解液桥力。
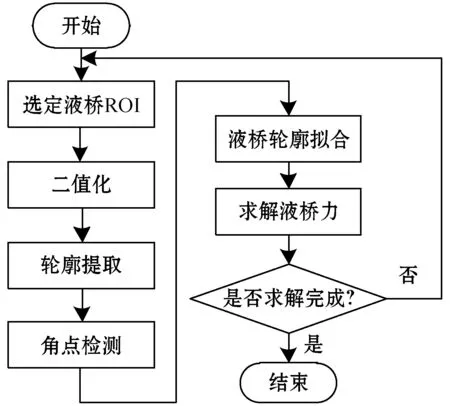
图2 图像处理的液桥力检测流程
2.2 液桥区域获取
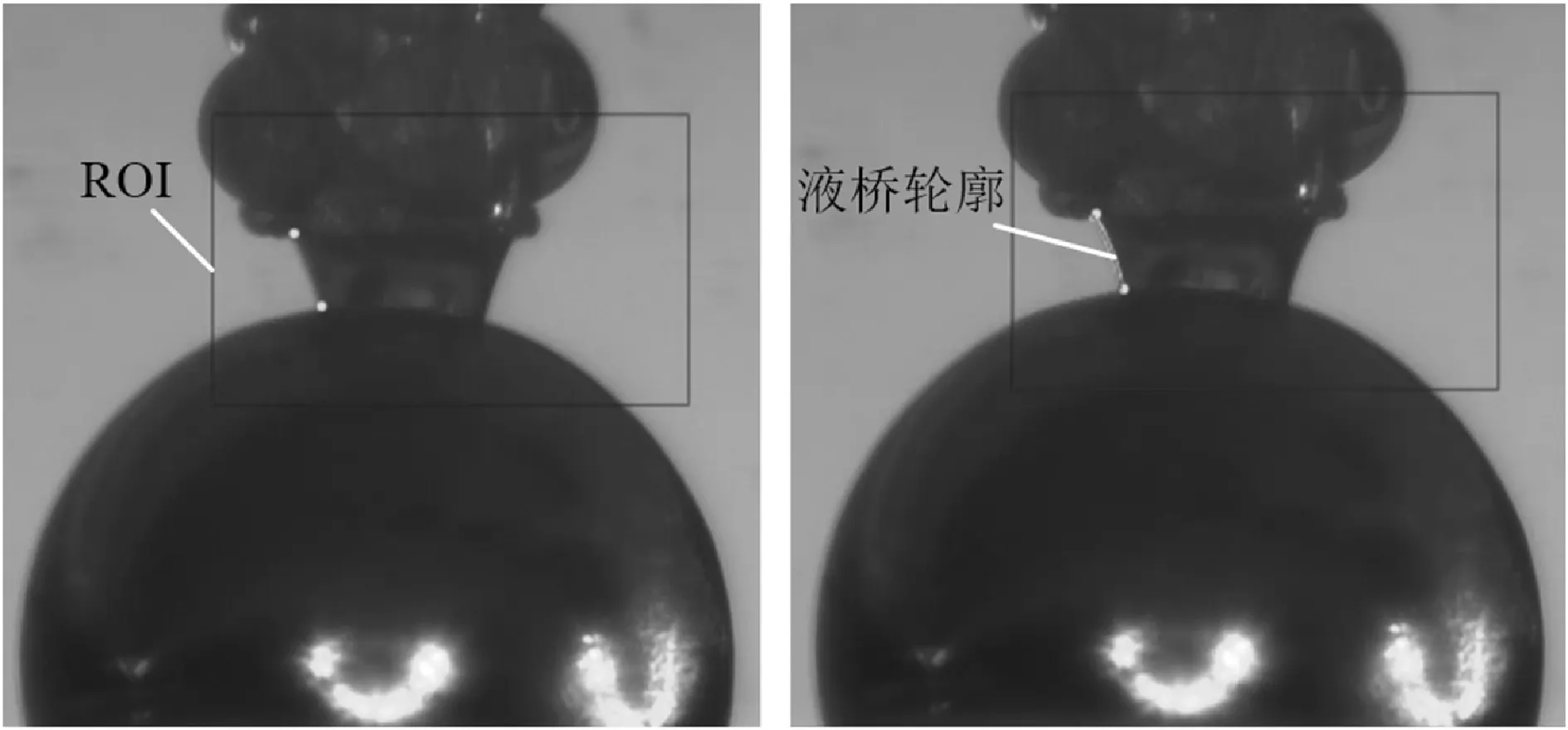
图像中包含操作工具、液桥和微球三个对象,而液桥力计算的目标区域仅为液桥。通过微球和操作工具的定位,进而限定液桥区域,操作工具的下端面为液桥的分界面。微球的位置通过梯度Hough圆检测的策略实现,获取微球的圆心位置和半径,对微球图像进行Canny边缘检测后提取微球轮廓。为了提高运算效率,液桥区域的提取在选定的液桥ROI内进行,如图3所示。包含微球球冠和操作探针末端的方框为选取的液桥ROI,液桥的识别在该限定区域内进行,约束了液桥区域左右两侧边界。液桥ROI既可通过已确定的微球位置自动确定,又可通过鼠标手动选取。微球的定位也可通过手动选择三个圆周特征点实现。在液桥ROI内,微球和操作工具间的区域即为液桥区域,如图3所示。
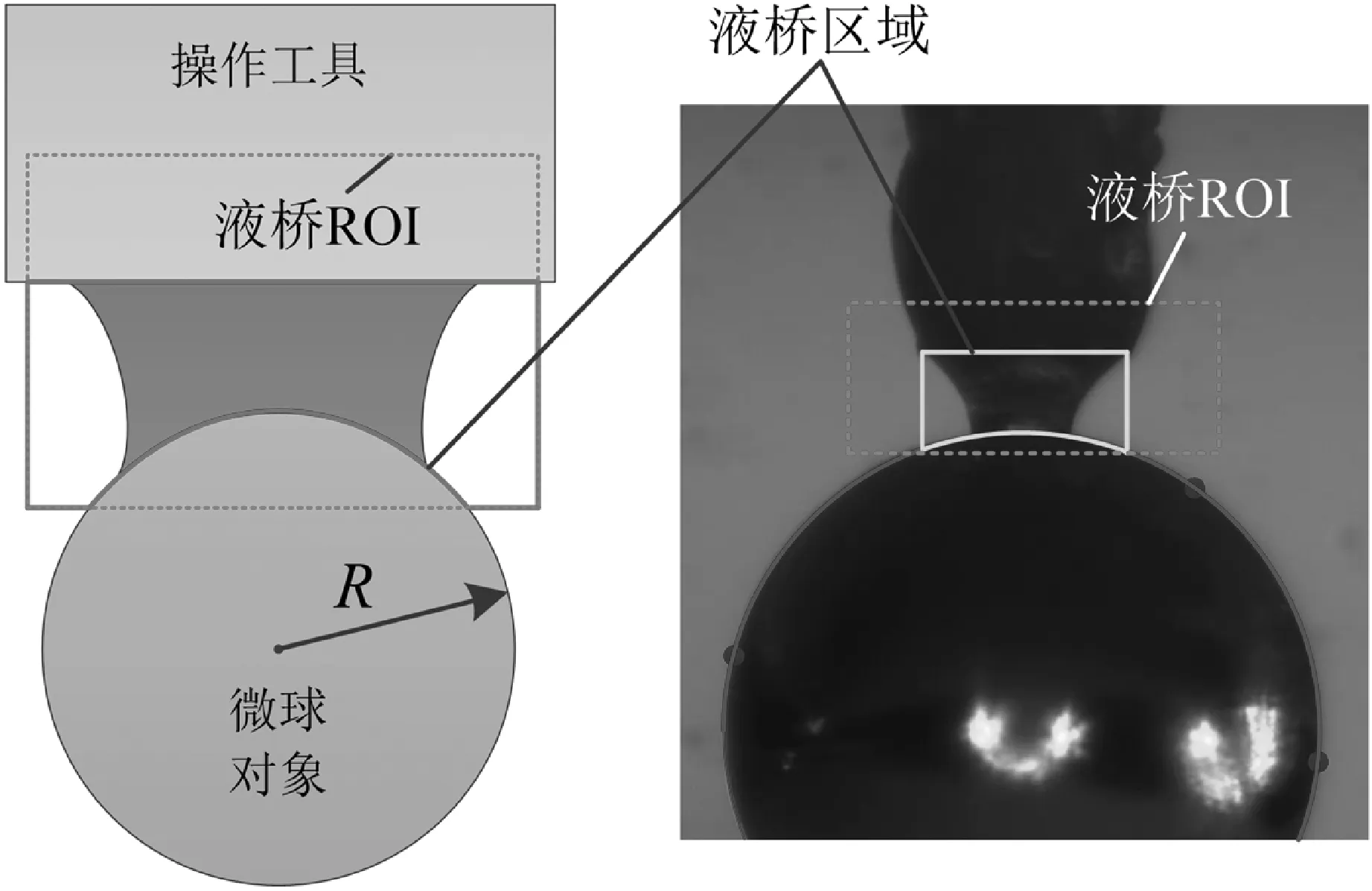
图3 液桥区域获取
2.3 液桥兴趣区域轮廓提取

(3)
式中:P1为目标区域的像素数占全部像素的比例;m1为目标区域的平均灰度值;P2为背景区域像素数占全部像素的比例;m2为背景区域的平均灰度值;mG为整个图像的平均灰度值。
图4所示为二值化后图像和提取后的轮廓,图4(a)上的斑点是操作工具表面反光所致。基于二值化图像对液桥区域轮廓进行粗、精过程提取。利用边界跟踪法获取粗轮廓,对二值化的图像从上到下、从左到右扫描,边界左上方的第1个边界点为初始点,按照逆时针方向搜索起始点的8领域点,搜索到的第一个与当前像素值相同的点为新的边界点,并作为新的起始点,直至完成所有边界点的识别,完成轮廓的粗提取。液桥具有柔性,轮廓易受到波动,通过基于参数化的主动轮廓模型(Snake模型)进行轮廓精提取[13]。参数化曲线为前一步提取的粗轮廓,可变形的曲线在外部、内部能量的作用下向边缘靠拢,收敛到边缘时能量达到最小。求解能量函数,获得对应欧拉方程的解,能量最小的曲线位置即为精确的目标轮廓。平面-球面配置下的液桥区域为对称特征,液桥力的求解仅需一侧轮廓的拟合方程即可,可通过确定的轮廓中心将液桥区域对称分割,如图4(b)所示。

(a) 二值化图像 (b) 轮廓提取图4 液桥兴趣区域轮廓提取
2.4 角点检测
为了实现液桥力的求解,需要在液桥区域轮廓中提取液桥轮廓,以便进行拟合、计算。目标液桥轮廓通过液桥上、下端点进行限定。本文基于Shi-Tomasi角点检测算法获取液桥区域轮廓中的角点,并作为液桥端点的候选点。当搜索窗口在图像中移动[u,v]时,引起的灰度变化为E(u,v),当灰度变化矩阵较小的特征值大于阈值时,则判定所在的位置为角点。图5所示为基于Shi-Tomasi角点检测的结果,通过确定的液桥中心可区分左右两侧的角点。
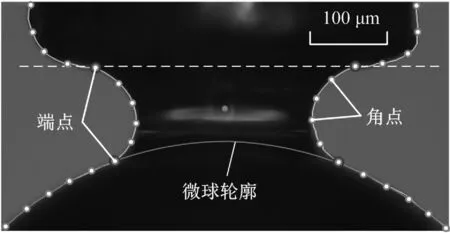
图5 角点与液桥端点提取
操作探针端面和基于Hough变换检测到的微球轮廓分别为液桥区域的上、下边界,该限定区域内,液桥轮廓上的角点为液桥端点的候选点。该区域内与操作探针下端、微球轮廓临近或接触的角点即分别为液桥轮廓的上、下端点。液桥端点的选择为下一步液桥轮廓的拟合奠定了重要基础。
2.5 液桥力求解
基于确定的液桥区域上、下端点,通过对端点间的轮廓进行拟合,获取液桥轮廓的数学表达式,并对液桥力进行数学求解。本文基于最小二乘法对液桥轮廓进行抛物线方程拟合,拟合方程为y=ax2+bx+c。图6所示为拟合后的液桥轮廓。将轮廓方程代入式(2),求偏微分Young-Laplace方程,可得到液桥压差ΔP。液桥润湿区域的周长l、球面的接触角θ2均可通过拟合液桥轮廓方程和边界条件求出,代入式(1)后,即可求解液桥作用力,实现图像处理的液桥力检测。
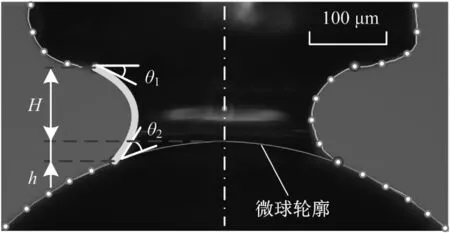
图6 轮廓拟合
3 实 验
搭建基于显微视觉的液桥力测量实验装置,并配置平面-微球间的测试模型,开展图像处理液桥力检测实验研究,分析本文方法的有效性,如图7所示。图7(a)所示为构建的测试实验装置,直径288 μm的探针作为单针式操作工具,直径760 μm的锡球粘接在玻璃基底上作为微球对象。制冷片控制下在探针末端产生液滴,运动平台控制液滴移动,与微球接触后形成液桥,分辨率0.1 μN的精密电子天平(德国Sartorius)作为力测量装置,光学显微镜采集液桥图像信息。
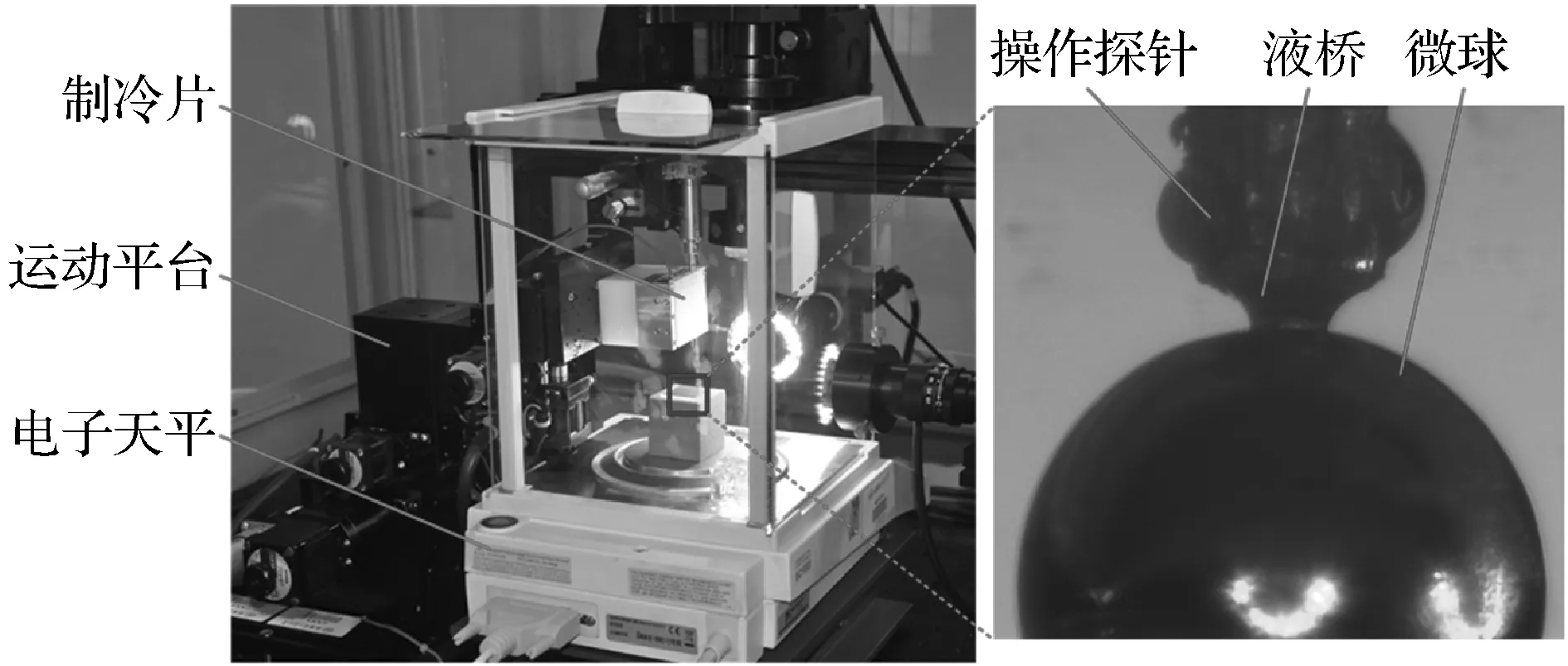
(a) 实验装置
(b) 定位 (c) 端点选取
(d) ROI选取 (e) 液桥轮廓拟合图7 液桥力实验检测流程
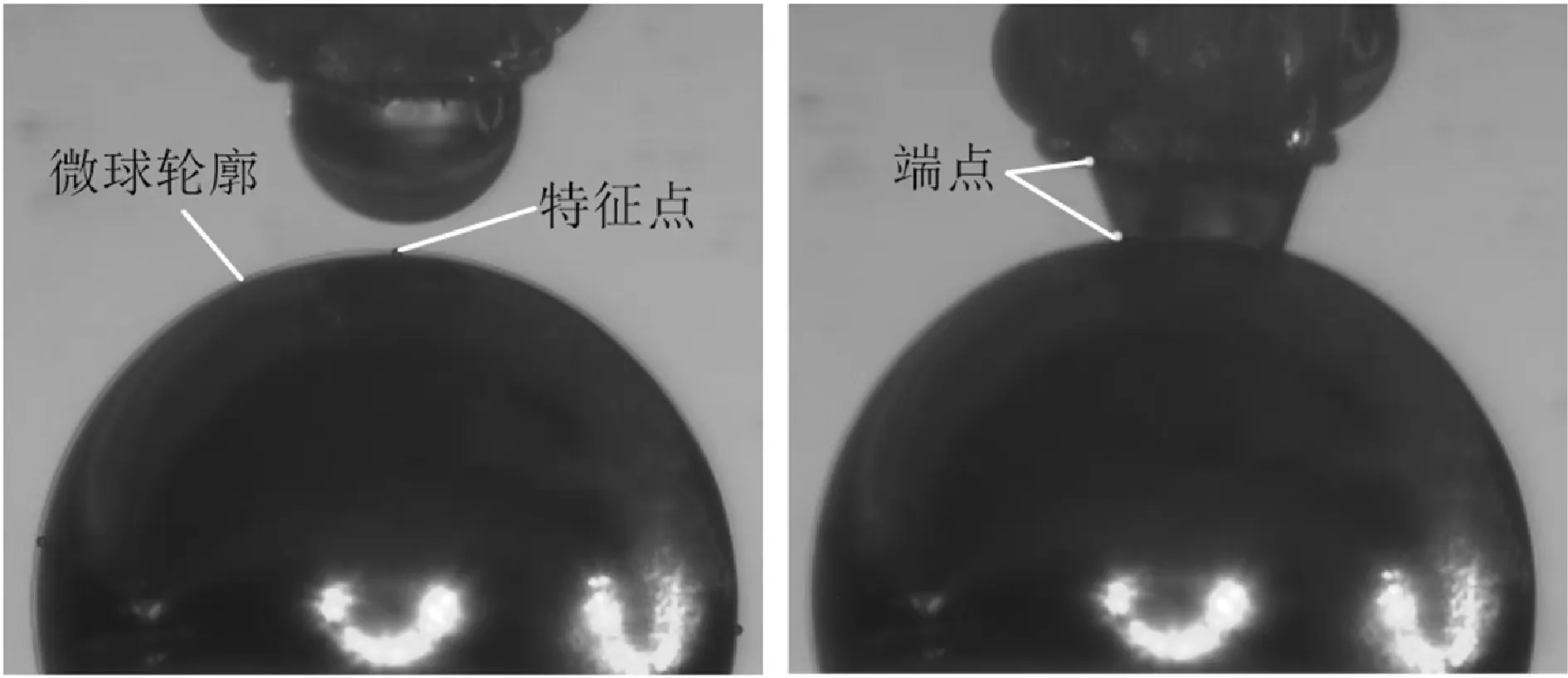
通过梯度Hough圆检测的策略实现先获取微球的轮廓,也可通过三个特征点的选取实现微球的定位,如图7(b)所示。根据接触后产生的液桥,确定液桥的端点,如图7(c)所示。根据产生的液桥位置,利用鼠标选取液桥ROI,液桥区域轮廓的提取均在该区域内进行,如图7(d)所示。基于划分的对称液桥图像,对液桥区域轮廓进行抛物线拟合,如图7(e)所示。
基于图像处理的液桥力检测流程,可获取液桥轮廓方程,并获取液桥的接触角、液桥内外压差等特征参数,代入式(1)即可求解液桥力。本文基于显微视觉反馈,选取8个实验样本进行图像处理的液桥力计算,并对比实验测量,验证所提出图像处理计算策略的有效性,结果如表1所示。液体介质为冷凝水,液桥的表面张力系数为0.072 8 N/m。实验结果表明,所测试样本液桥力的最小误差为0.18 μN,最大误差为2.62 μN,对应的相对实验测量值的偏差比分别为1.4%和17.78%。8组实验样本的平均误差为1.08 μN。实验结果验证了所提出图像处理液桥力计算方法的有效性,为基于液体介质的微操作机器人系统的液桥力动态检测提供了有效途径,对下一步的操作进程具有重要的指导意义。
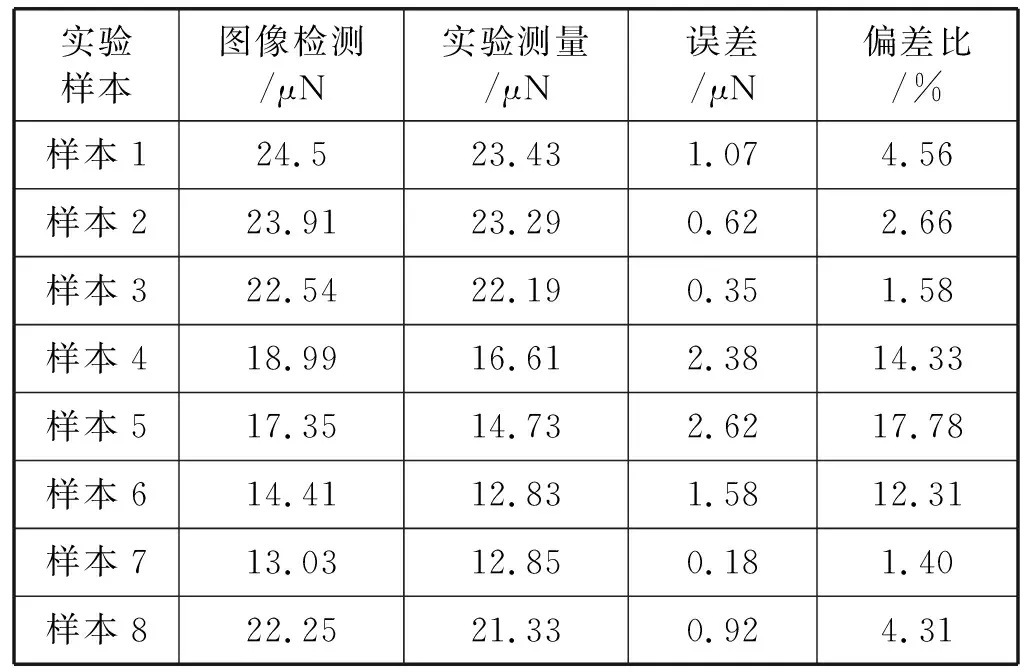
表1 测量数据
4 结 语
面向平面-球面配置下的液桥作用模型,本文研究了基于图像处理的液桥力检测方法,实现液桥轮廓的提取和液桥力计算。建立平面-微球液桥作用理论模型,分析了液桥力计算的理论途径。设计了基于图像处理的液桥力检测流程,主要包括微球位置的确定、液桥区域轮廓提取、液桥轮廓拟合和液桥力计算等进程。基于Shi-Tomasi角点检测方法,确定液桥端点,并完成液桥轮廓的精确提取。搭建了测试装置,开展图像处理的液桥力检测的实验研究,并通过液桥力测量对比分析图像处理结果的误差。在平面-微球结构配置下,8组实验样本的检测结果表明,图像处理液桥力的平均检测误差为1.08 μN。图像处理的检测方法为液体介质微操作机器人液桥力的实时检测提供了有效手段,也为操作进程的进一步调控提供重要的依据。
猜你喜欢
焊接学报(2024年2期)2024-03-08 10:52:26
百科探秘·航空航天(2023年4期)2023-04-24 14:22:43
大学物理(2021年12期)2021-12-12 09:47:04
力学学报(2021年7期)2021-11-09 06:27:04
制造技术与机床(2019年8期)2019-09-03 01:14:40
电子技术与软件工程(2018年10期)2018-07-16 12:04:18
数学物理学报(2017年2期)2017-06-05 09:12:31
电子科技(2016年12期)2016-12-26 02:25:49
系统工程与电子技术(2016年4期)2016-08-24 07:46:28
数学年刊A辑(中文版)(2014年5期)2014-11-01 05:43:42