
基于毫米波雷达的“数字信号处理”综合实验
2022-09-05 09:12宋晓骥李德鑫万建伟
电气电子教学学报 2022年4期
刘 涛 许 可 宋晓骥 李德鑫 万建伟
(国防科技大学 电子科学学院, 长沙 410073)
“数字信号处理”是本科电子信息类专业的一门核心课程,具有很强的工程实践特色[1-2],课程知识点如离散傅里叶变换、数字滤波器等直接应用于工程实际,因此,实验教学在“数字信号处理”课程教学中发挥着重要作用。
以教学实验箱为代表的实验器材简单易用、便于演示,广泛用于实验教学。然而,这类器材往往以验证性实验为主,并且许多细节往往隐藏于面板后,只留出接线柱、按钮等[3],与实际应用相差较大,学生在实验时直观认识不足,面对实际问题往往不知如何入手。
为此,提出以工程项目的组织方式、按照“需求发布、方案评审、现场测试、项目验收”等环节,开展了课程综合实验。以工业和产品开发中实际使用的毫米波雷达传感器和DSP芯片为基本器件,设计了“基于毫米波雷达的手势感应控制”这一综合实验,通过完整的工程项目流程,综合锻炼了学生对信号采样与插值重构、离散傅里叶变换、数字滤波器的设计与实现等知识点的掌握和应用。
1 实验设计思想
案例总体思路是以工程需求为牵引设计综合实验,覆盖信号的产生、采集、处理和使用等各个环节,使数字信号处理的各个知识点都得以运用。在教学实践中,将实际的雷达器件引入教学[4],把雷达测距的基本功能与手势动作检测问题结合在一起,具有实用性和趣味性,同时也将雷达回波与频谱分析这一工具结合,巩固知识点。
2 实验案例设计
2.1 实验原理
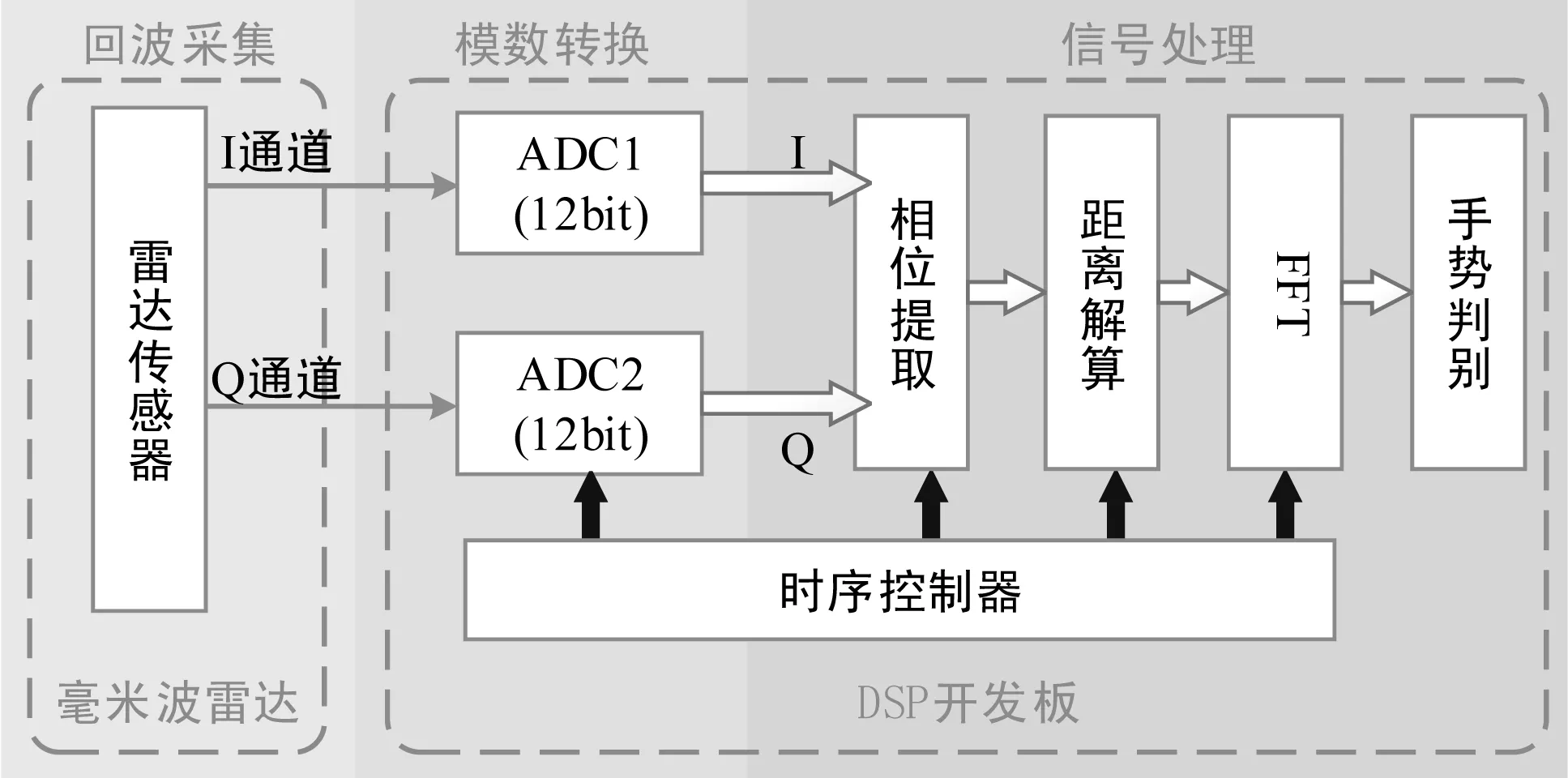
实验基于连续波雷达探测基本原理[5]。雷达发射的电磁波,被目标反射形成后向散射回波,通过数字信号处理方法可获取目标的距离、方位等信息。雷达系统基本组成如图1(a)所示,图1(b)显示了回波的解调流程,解调后的雷达回波与距离的关系可表述为:
(1)
其中d为目标的距离,c为自由空间中的电磁波速,f为发射频率,σ为回波幅度,j表示虚数单位。

(a)雷达系统组成

(b)雷达回波解调过程图1 雷达原理
根据式(1),回波的相位部分表征了目标与相对距离,由于式中的f、c均为已知量,则距离可以通过简单的运算得到,即:
(2)
其中unwrap是相位解缠操作。
实验的难点是找到雷达的测距能力与手势识别的结合点。考虑手与雷达间的相对位置会随手掌的挥动而变化[6],若能设计一种动作模式使手掌与雷达间距离按“远离-接近-远离”的模式进行周期变化,则由式(2)解算的距离会随着手掌的远离或接近而增大或减小,形成周期振荡的信号,进而可以应用离散傅里叶变换这一工具对信号进行频谱分析,得到信号变化周期。
2.2 实验条件与要求
实验采用的雷达传感器为毫米波雷达芯片[7](Innosent 334,见图2(a)),工作频率为24 GHz,尺寸仅硬币大小,在汽车雷达、电子产品中使用广泛。DSP基于00IC POP28335开发板,搭载了TMS320F28335型DSP芯片,开发软件为CCS 6.0及Matlab。实验所采用的器件均为5 V电压工作,可由电脑USB口直接供电,无需专用实验场地。

(a)毫米波雷达传感器外观与尺寸对比

(b)DSP开发板图2 实验器件
该实验安排课内学时6学时,要求学生基于以上器件自行设计方案,搭建手势感应雷达系统,实现非接触式感应操作控制开关,具体实现功能包括:
(1) 利用毫米波雷达模块及DSP芯片,搭建手势感应雷达的硬件电路;
(2) 使用示波器观察雷达芯片的输出信号,辅助调试硬件电路;
(3) 完成信号采样,将雷达模块输出的模拟回波信号转换成数字信号;
(4) 设计合理的参数,对数字回波信号进行处理,对手势做出判决并执行控制动作。
2.3 问题引导
该案例覆盖数字信号处理多个知识点,实施过程按“从问题需求入手,逐层分解功能”的思路进行引导,把每个功能点对应到具体的知识内容,然后才是结合器件设计方案。
首先,雷达模块的输出信号是模拟信号,要进行数字处理分析,第一步要完成模拟到数字信号的转换(ADC),这就涉及到采样率、量化位数等参数的设置,需要对“模拟信号采样与插值重构”这一知识点有深入的理解并能灵活运用。
第二,雷达本质上是对目标距离的测量,根据2.1节实验原理分析,设计动作模式使手掌与雷达间距离按“远离-接近-远离”的模式进行周期变化时,可得周期振荡的信号,进而引出离散傅里叶变换这一工具对信号进行频谱分析,提取周期规律。
最后,还要考虑到实际信号受到噪声的干扰,因而考虑使用滤波器滤除干扰噪声,这就自然引出“数字滤波器”相关的知识点。
2.4 实现方案
通过前述问题引导,从挥手导致手掌与到距离发生变化这一效果入手设计手势动作,图3(a)显示了对应的场景想定。当挥手速度发生变化时,所测量信号的振荡周期也随之变化,通过对信号频率的分析可实现挥手速度的判别。据此,设计使用前后挥动手掌为有效手势动作,以挥手快慢为依据判定控制类型。处理算法方面,使用FFT算法对信号进行快速频谱分析,检测最大频率分量判断当前挥手频次。
设定频率的阈值,将挥手速度的快、慢划分为两种控制模式,总体设计方案如图3(b)所示。信号处理过程既可在DSP上编程实现,也可以将数据传输到计算机由Matlab编程实现。为了便于演示,本实验要求数字信号先传输到计算机,在计算机上进行处理和演示。图3(c)给出了系统的整体效果。

(a)手势感应的场景与信号机理
(b)系统总体方案
(c)搭建完成的电路图3 手势识别雷达系统方案及组成
2.5 效果演示
首先用示波器观察雷达的输出的响应信号,用来确定电路搭建是否正常,见图4,可以看到手在雷达前挥动时得到周期性信号波动。

图4 示波器观察挥手动作的雷达信号模式
图5(a)显示了以每秒4~6次的频率在雷达前挥动手掌的效果,可见频谱分析检测到信号的周期变化是每秒6次左右。以每秒3次为判决阈值,图5(a)的结果可判定为快速挥手。当手掌在雷达前以每秒2次左右的节奏挥动时,响应如图5(b)所示,通过频谱分析检测到信号的周期变化是每秒2次,判定为慢速挥手。可见,雷达回波的频谱分析可以有效判别挥手模式。

(a)快速挥手

(b)慢速挥手图5 实验结果演示
2.5 知识延伸
该案例综合运用“数字信号处理”课程中的A/D采样、FFT和数字滤波器等主要知识点。由于数据采集是源源不断的,为了实现实时处理,在设计数字信号处理算法时,还需学生对输入信号进行分段处理。
考虑到手势动作完成的时间及刷新速度需求,以每次截取0.5 s时间长度的信号为宜,一是基本保证可以完成一次手势控制动作,二是确保响应足够要及时,达到每秒2次输出的效果。
同时也提醒学生注意到,当没有任何手势动作时,依然存在微弱的回波,这是因为该实验采用的雷达传感器有效作用距离可达3 m,附近物体的运动也反射雷达波,进而形成一定的随机干扰。这在实际系统中是不可避免的,建议学生可查阅随机信号处理、模式识别等课程相关知识点,提升系统的识别效果。
3 结语
提出了以工程项目的方式组织数字信号处理综合实验,设计了一个“基于毫米波雷达的手势感应实验”。以毫米波雷达为平台,贯穿“数字信号处理”课程中的A/D采样、离散傅里叶变换、FFT、数字滤波器的设计与实现等教学内容。
实验系统集成度高、体积小、计算机供电,可直接用于课堂教学案例演示,加强教学效果,同时也让学生接触到实际器件的使用和实际系统的调试等,紧扣工程实践,极大地锻炼了学生的综合实验能力。
猜你喜欢
包装工程(2022年9期)2022-05-13
红领巾·萌芽(2019年9期)2019-10-09
小学阅读指南·低年级版(2017年6期)2017-06-12
亚太教育(2016年34期)2016-12-26
文理导航(2016年32期)2016-12-19
科技视界(2016年13期)2016-06-13
数学大世界·小学低年级辅导版(2010年9期)2010-09-08
