机载激光雷达技术在自然淤积区海岸线测绘中的应用
2022-09-02 02:20:50罗正龙袁峥吴玮
城市勘测 2022年4期
罗正龙,袁峥,吴玮
(1.宁波市阿拉图数字科技有限公司,浙江 宁波 315042; 2.宁波市测绘和遥感技术研究院,浙江 宁波 315042)
1 引 言
海岸线平均大潮高潮时水陆分界的痕迹线[1],是海陆相互作用频繁的地带,具有重要的生态功能和资源价值,关系国家海洋生态安全,海洋经济绿色发展和沿海地区民生福祉,海岸线的调查、信息提取及变迁研究是海岸线研究的一项重要内容。近十几年来,依托海洋空间资源,海洋经济快速发展。然而,不合理的空间开发布局和简单粗放的开发利用方式,导致海岸线资源浪费、生态环境恶化和区域承载力下降,已影响到沿海地区经济社会的可持续发展。如何快速、准确地获取自然淤积区海岸线,对沿海地区编制国土空间规划,科学制定自然岸线保有率管控目标和实现海岸线资源精细化管理具有重大意义。
沿海自然淤积区三维地理信息的精确获取是海岸线勘定的重要前提。机载激光雷达技术兼具快速、高效、准确的特性已经成为地表三维数据获取的一种重要方法[2,3]。该技术穿透地表植被,经过分类处理能够获取真实的地形地貌数据[4,5]。
本文以机载激光雷达技术应用于自然淤积区海岸线勘定为例,阐述机载激光雷达测量方法在自然淤积区海岸线测量上的可行性。
2 关键技术
传统海岸线测量技术无法准确测量自然淤积区的海岸线位置,且效率低,同时对测量人员的生命有很大的风险。本文采用集成激光、GNSS和INS 3种技术的机载激光雷达系统,通过非接触目标的激光扫描测量的方法,对自然淤积区地表进行高精度测量,以获取地形地貌三维数据。
本次项目采用整体结构小、重量轻的AS-900HL多平台激光雷达测量系统进行数据采集(图1)。通过高精度的惯性导航系统,快速实时采集地表高精度三维数据。

图1 AS-900HL多平台激光雷达测量系统
自然淤积区海岸线测量主要作业流程为实地踏勘、控制测量、航线布设、外业航测、数据处理、实地检核、潮位分区、海岸线位置计算。
2.1 实地踏勘
在工作开展前应前往现场充分了解测区情况,并收集可利用的地理信息资料。
2.2 控制测量
平高控制点是激光雷达测量的起算依据。应根据踏勘情况,在测区范围内布设满足要求的平高控制点。平面控制测量采用GNSS RTK测量方法施测,高程控制测量采用水准测量施测。
2.3 航线布设
为满足现行《CH/T 8023机载激光雷达数据处理技术规范》航线规范的相关要求,基于激光点云精度要求出发,从航线重叠度、点云密度、测区GPS信号强度,进行航线规划,设计飞行方向、生成最佳任务航线。为提高地面点的密度及激光雷达的穿透率,保证测量精度,可重新设计飞行路线重复航飞[6]。
2.4 外业航测
沿已规划好的航线进行数据采集。在数据采集之前,为保证移动测量系统精度,应选用满足CH/T 8023-2011的GPS接收机2Hz要求的设备作为基站仪器。
2.5 数据处理
(1)数据解算
机载测量系统POS数据解算是利用Waypoint软件对POS数据、GPS基站数据进行联合解算,流程如图2所示。
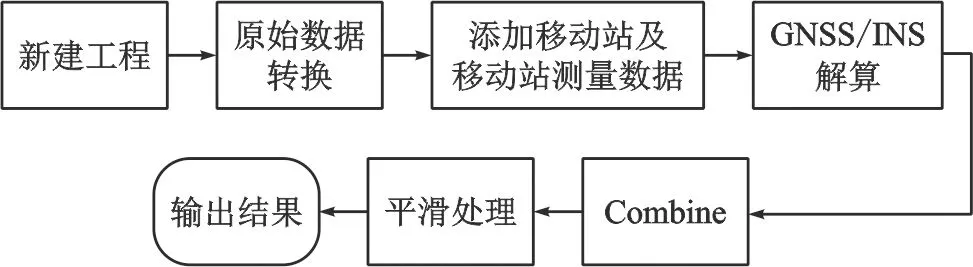
图2 POS数据处理流程
(2)点云解算
采用双差分定位方法,在已知精确坐标的点上架设地面基站,测定具有空间相关性的误差或其对测量定位结果的影响,利用精密星历和钟差文件进行改正解算,获取高精度结果。将联合定位信息加入处理软件系统进行处理,获得激光扫描仪机载测量系统模式的行迹文件,确定每一个激光点的坐标值,对整个点云文件进行定向。
(3)点云滤波
利用Terrasolid软件进行数据分块,将经过分块后的点云文件进行自动分类和人工分类。对于特定的难以区分的地物,在自动分类的基础上采用手动将其分类提取。点云自动分类流程如图3所示。

图3 点云分类流程
(4)DEM制作
利用Terrasolid中的TerraModel软件将地面点激光点云数据,加入特征线数据辅助,进行内插提取高程值,获得DEM产品。对于因地表模型存在局部不合理区域造成的DEM错误,利用人机交互分类工具进行细节修正。
2.6 点云精度评价
因自然淤积区滩涂地植被分布不均且现场情况不一致,为确保机载激光雷达测量数据精度满足需求,全部通过现场人工测量方式测量不同植被分布地测量原始地坪标高,与机载激光雷达系统测量成果进行评价分析。
2.7 潮位分区[7]
结合测区自然地理情况,充分考虑测区地形地貌空间分布情况,根据周边潮位站多年平均大潮资料解算测区平均大潮高潮位潮位值,用于海岸线分区计算。
2.8 海岸线位置计算
利用各分区平均大潮高潮位数值结合机载激光雷达点云数据,以大数据可视化分析的方式将不同分区的海岸线计算出来:以分区潮位数值为分界点,根据点云分类两色图,计算海岸线位置。
3 点云精度评价
为了验证点云数据的可靠性,确保机载激光雷达测量数据精度满足需求,对整个滩涂内人工可达到的区域,采用网络RTK方法采集海岸线两侧范围内不同植被分布区域的检查点的三维坐标,并假定人工实地测量的数值是真实值,将其与激光点云数据进行比较,从而评定机载激光雷达系统的测量精度。
激光点云测量范围覆盖整个滩涂区域。本次获取的激光点云数据的点云密度为212个/m2,优于现行CH/T 8023对 1∶500地形图密度16个点的要求,并采用网络RTK方法采集测区范围内的198个检查点的三维坐标数据。平面中误差为 ±6.2 cm,高程中误差为 ±4.4 cm,如表1所示,根据统计结果,说明机载激光点云数据是具有一定的可靠性和准确性。
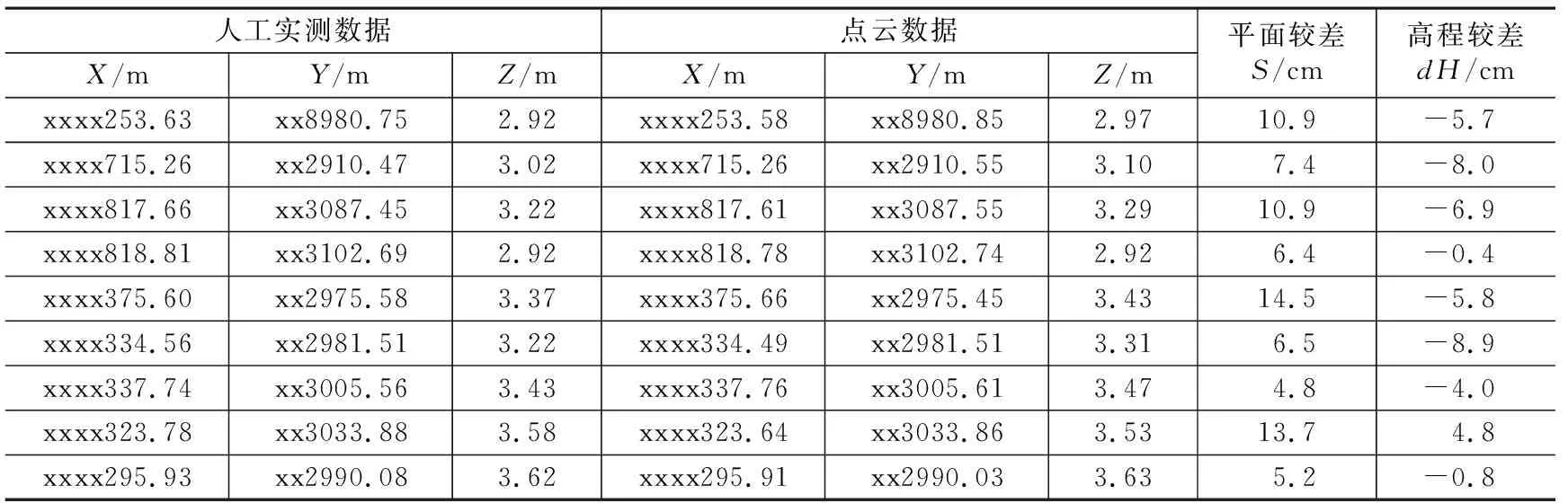
表1 点云数据与人工实测数据对比分析表
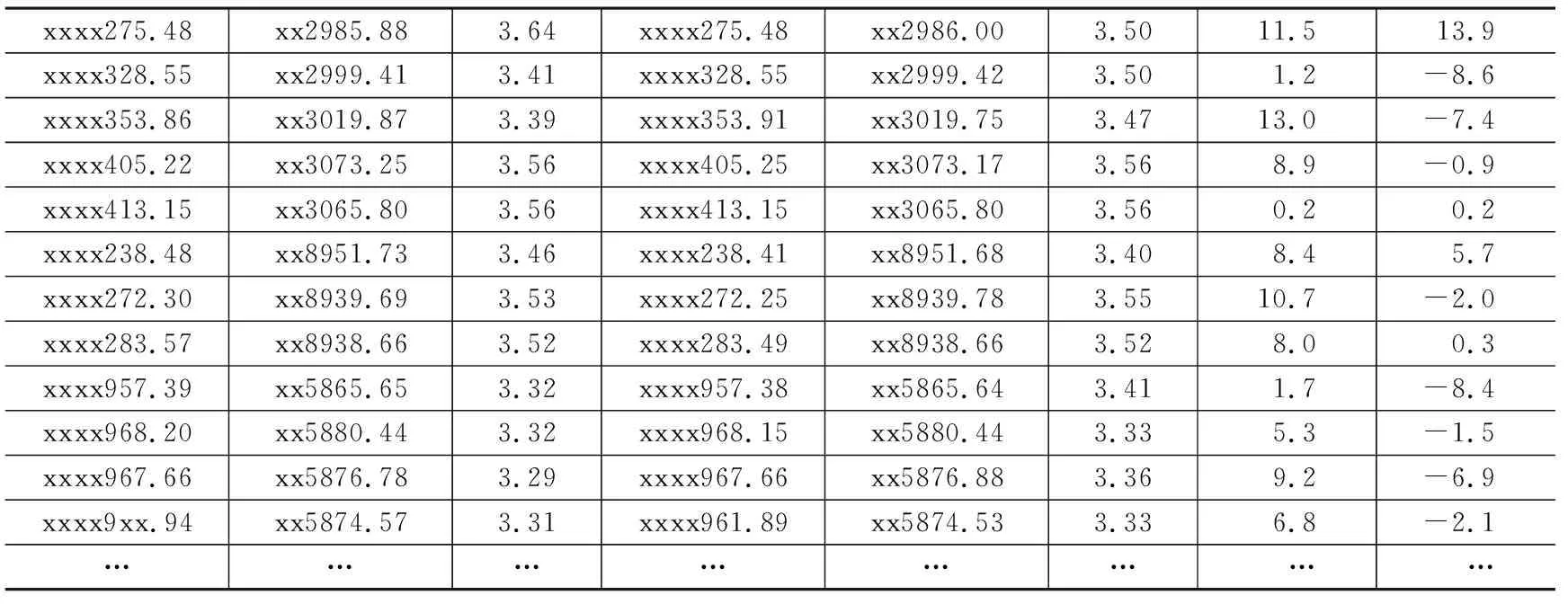
续表1
4 注意问题
在本次测量及数据处理过程中发现,除硬件与软件系统以外,以下两个方面会对测量精度产生影响。
(1)起算基准:机载激光雷达系统起算基准点应均匀布设在沿海滩涂周边稳固的地面上,若滩涂内存在人类活动产生的硬化土质路面,宜根据实地条件增设起算基准点;
(2)滩涂环境:自然淤积区内植被的类型、高低、疏密会直接影响激光点云的数据精度;植被过密会影响激光的穿透性,导致测量的数据无法反映真实的地形。实地检测时应结合滩涂区域的高分辨率影像,并根据植被的分布特征来选取检测的区域。
5 结 论
机载激光雷达测量方法不仅适用于人工岸线、基岩岸线和砂质岸线[8],在自然淤积区海岸线测量中也是行之有效的,可为其他沿海地区淤积区海岸线测量提供参考。
机载激光雷达技术在获取地表三维地理信息数据具有高效、便捷、精确的特性,使自然淤积区海岸线动态变化监测成为可能;海岸线成果及其变化趋势及时掌握能更好地为海岸线资源精细化管理提供决策支撑。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
保健医苑(2022年5期)2022-06-10 07:46:06
河北地质(2021年4期)2021-03-08 01:59:14
肝博士(2020年5期)2021-01-18 02:50:28
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
摄影之友(影像视觉)(2018年1期)2018-03-22 01:11:54
摄影之友(影像视觉)(2017年11期)2017-11-27 02:39:43
摄影之友(影像视觉)(2017年10期)2017-11-07 02:37:15
摄影之友(影像视觉)(2017年12期)2017-02-08 02:10:01