
下肢外骨骼人机协同控制的体系设计与仿真
2022-08-31 19:18:39李钊马斌李海于朱庭江海岳
电脑知识与技术 2022年18期
李钊 马斌 李海 于朱庭 江海岳


摘要:针下肢外骨骼机器人协同步态预测和控制方法,结合三维图形学,提出一种体系研究方案,并通过实时仿真对人机协同效率进行评估。通过实时采集人体运动信息和肌电信息,构造虚拟人体运动骨骼模型,预测运动步态,并采用三维骨骼重定向技术对机器人运动进行实时控制,达到人机协同运动效果。实验证明,当人体动作变化时,在仿真环境中外骨骼机器人能够实时同步人体动作。
关键词:体系结构设计;图形学;外骨骼;重定向算法
中图分类号:TP391 文献标识码:A
文章编号:1009-3044(2022)18-0056-03
开放科学(资源服务)标识码(OSID):
1 引言
可穿戴外骨骼机器人是能够识别人体运动状态并提供助力、增强人体机能的可穿戴仿生机械装置[1],在军用和民用领域有着极大的应用前景。
外骨骼机器人的结构设计包括主动式助力外骨骼机器人以及被动式助力外骨骼機器人[2]。目前大多数研究团队以主动式的有源助力康复型外骨骼研究为主,代表性的有日本筑波大学研发的下肢康复型外骨骼机器人HAL[3],以及ReWalk[4]、ReLeg[5]等,该类型的外骨骼机器人大多通过按钮信号或识别启动信号,通过预定的运动曲线带动人体运动,适用于脑卒中或行动机能衰退的老年人的复健训练。文献[6]所设计的下肢外骨骼Ekso通过预设的4种步态相位结合人体运动数据的步态预测实现外骨骼的控制,文献[7]所设计的军用外骨骼机器人HULC通过有限状态机加液压驱动的方式实现了有效的助力从而达到辅助士兵训练的目的。被动式以无动力源的外骨骼为主,根据外骨骼与人体的交互力设计科学的外骨骼结构,合理地布置机械结构能够对受力进行合理传导,从而实现无动力外骨骼中“无动力”的要求[8]。
针对不同的应用场景及功能需求,外骨骼机器人有着各种各样的体系结构设计和控制策略。显然,如果要求外骨骼机器人自适应穿戴者的意识而进行协同运动,必须要有感知、助力的能力,对穿戴者的运动意图进行识别和预测[9]。为了增强外骨骼机器人的协同控制效率,针对现有人机协同型外骨骼机器人开发环境的不足,设计了一种外骨骼机器人协同步态控制的体系研究方案和外骨骼重定向协同控制算法,并通过仿真环境对算法进行了可视化评估。
2 下肢外骨骼协同步态控制的体系设计
2.1 总体结构设计
外骨骼机器人的体系结构,分为硬件系统和软件系统。为方便真机调试,机器人为外界预留一个以太网接口,研发和维修阶段可以通过网络发送控制命令进行调试。主要包括:人体运动数据采集系统、运动意图识别分析系统、人工智能预测系统、机器人控制系统。
2.2 硬件系统设计
硬件系统主要包括外骨骼机器人控制系统以和人体下肢运动数据采集系统。
自主设计的外骨骼机器人结构及硬件系统架构如上图所示,主要包括控制系统、电源管理系统、驱动系统、传感器系统。控制系统通过上位机向机器人各硬件、系统发送指令,联网控制模式下可以接收外部命令。电源管理系统主要管理电源和充电器,就像机器人的心脏,为机器人提供动能管理,负责向下位机、电机、驱动器、传感器等装置供电以及开关机电源控制、充电等功能。驱动系统主要管理下位机、驱动器、电机的运动,通过向下位机发送指令,下位机再适配采样,对时间进行拟合,向电机驱动器发送指令,电机驱动器通过改变电流或电压来控制电机。传感器系统主要针对足底传感器、位姿传感器以及对从下位机或肌电采集设备上传的信号进行采集和处理。此外,外骨骼机器人硬件系统可以在服务器软件层通过以太网接收扩展的智能传感器设备,如图2所示为基于柔性面料自制的人体下肢运动数据的采集设备,以扩展采集人体肌电和姿态传感器收集到的数据。
自制人体下肢肌电信号采集设备上传感器及其他硬件的分布如图3 所示。上位机(upper)通过一个集线器连接多个振荡器(oscillator),每个振荡器接多路肌电传感器,肌电传感器的电极片直接贴在人体皮肤表面采集数据。该信号采集系统通过以太网向调试主机(host)或者外骨骼实时发送预处理后的人体表面肌电信号。
2.3 软件系统设计
外骨骼机器人的软件系统,主要包括外骨骼机器人智能控制系统和人体运动姿态感知系统组成,分别运行在外骨骼机器人控制系统和人体下肢运动数据采集设备上。
外骨骼机器人智能控制系统,是机器人的“大脑”,主要包括控制服务器、多节点协同系统、智能感知系统。
控制服务器通过以太网与外部系统(远程控制端或人体运动数据采集系统)对接,可以控制外骨骼机器人按照保留录制的标准动作进行运动。提供传感器、电机等其他装置的状态信息监控接口。
多节点协同系统,将机器人上位机和下位机看作平等协作的节点,对各主机进行时钟同步、数据流缓冲处理、拟合插值等操作,使各种智能传感器、电机的数据在同一时钟周期下,并通过智能感知系统的分析,对各节点进行协同控制。
人体运动姿态感知系统通过分析由肌电传感器和姿态传感器以及足底压力传感器等输出的多模态人体运动数据,反馈识别或预测结果,对机器人的步态进行协同控制。步态识别通过机器学习算法对多模态运动数据训练识别模型并输出人体步态相位的识别结果。步态预测通常是在步态相位识别基础上,通过深度神经网络对姿态关节角度进行预测。
但是系统的预测结果是以人体下肢为模型的关节角度预测,即使外骨骼机器人的骨骼和人体的骨骼在外观上高度类似,但人体和机器人的关节之间相对位置的不会完全相同,所以还需要经过下文将要介绍到的重定向协同步态控制算法,将预测运动数据映射到外骨骼机器人结构运动数据,从而实现对机器人的控制。
3 重定向协同步态控制算法设计
3.1 人机协同的工作机制
人类下肢运动是通过髋关节、膝关节和踝关节的协同运动实现。为了识别人体运动意图,可对人体骨骼进行建模识别,一般以后背腰椎处作为锚点。协同运动的一个前置需求是机器人能够根据人体动作从动。
根据人体下肢关节的自由度与下肢外骨骼机器人的机械结构,图4定义了人体下肢骨骼和下肢外骨骼的逻辑结构模型。并对上述两种结构的运动姿态矩阵作出如下定义:
[SH={QH[i]|0≤i≤n}] (1)
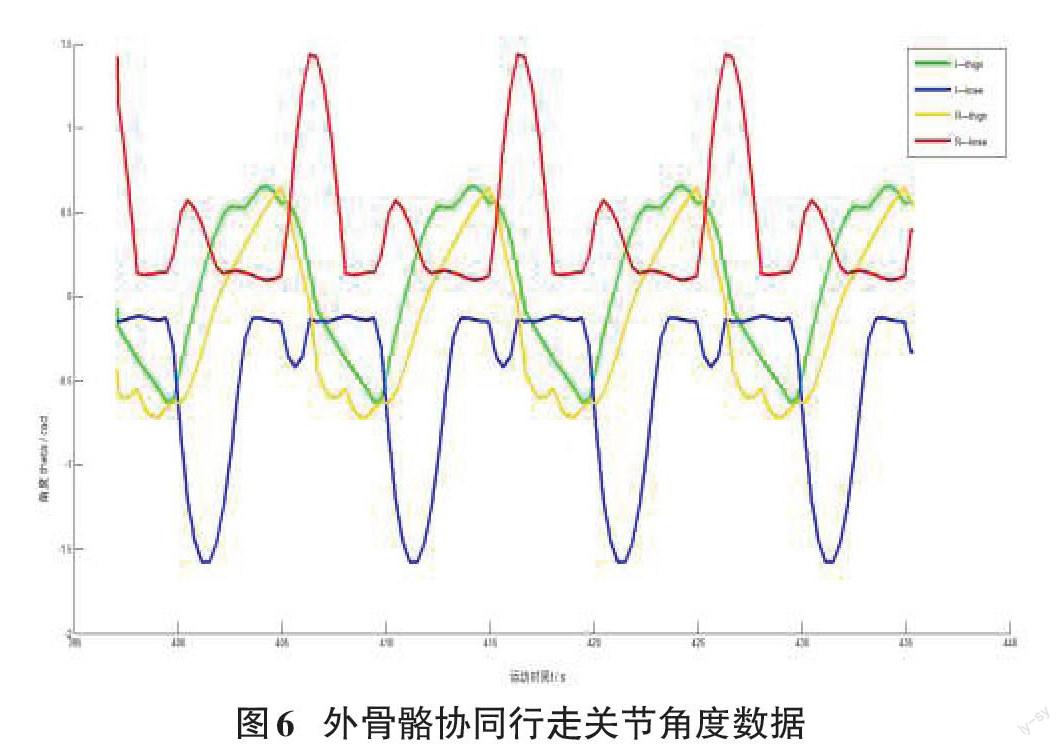
[SR={QR[i]|0≤i≤n}={Al[i],Ar[i]|0≤i 其中,[SH]和[SR]代表虚拟人体结构和外骨骼结构的姿态矩阵,[n]代表关节个数。[QH[i]]和[QR[i]]分别代表人体和外骨骼下肢第[i]个关节的运动四元数,[Ar]和[Al]表示外骨骼的电机角度矩阵。考虑到人体下肢运动时,与可穿戴下肢外骨骼设备在关节处的自由度不同,所以以四元数代替角度作为人体下肢关节运动的参考值[10]。显然,机器人的驱动控制存在一个延迟[Δt]。因此,当人体骨骼[SH(t+Δt)]的预测值[SH'(t+Δt)]越准确,外骨骼 3.2 外骨骼重定向协同算法步骤 重定向协同步态控制算法的原理是通过传感器输出的关节位置数据计算关节四元数,对target点近似计算关节位置,计算出人体的运动姿态矩阵,再根据机器人的逻辑模型与人体模型的对应关系,计算机器人各个关节角度,从而得到外骨骼的姿态矩阵。 此处不能直接将人体的运动角度直接作为外骨骼的控制参数的原因是通常外骨骼机器人的关节只有两个自由度低于人体骨骼的自由度低,且关节间的空间相对位置不同,使用这种方法时会产生较大误差,从而影响人机协同效率。因此需要通过[t]时的[SR(t)]和[SH(t)],以及下一时刻人体骨骼的预测姿态矩阵[SH(t+Δt)]建立外骨骼姿态矩阵与人体姿态矩阵的映射关系: [SR(t+Δt)=Fretarget(SR(t),SH(t),SH(t+Δt))] (3) 其中,[Fretarget(*)]代表重定向协同控制算法,接着对[SR(t+Δt)]进行角度计算,可得出外骨骼各关节处的电机角度矩阵[A],控制系统根据[A]向对应的电机发送命令,完成协同控制。 以下展示了重定向协同控制算法的步骤: 对于右腿髋关节,详细算法步骤如下: 膝关节,详细算法步骤如下: 4 仿真评估 在3D环境中,实现仿真内核通过外骨骼数据服务器实时接收传感器控制器采集到的数据,并通过模型构造算法实现实时仿真。利用Unreal Engine中的studio功能对导入的CAD文件进行逻辑建模。根据各零部件间相对关系,自定义机器人组装脚本,并实现三维模型实时动画效果。对网络发送的动画数据,或采集的动画,运行在标准人体模型上,同时用协同控制算法将该运动重定向到外骨骼机器人的3D模型上,实现外骨骼机器人模型与人体模型的同步运动,并观察评估人体与机器人相对运动的协同程度。 外骨骼机器人仿真运动与人体运动步态对比如上图所示,人体下肢表面的绿色亮点代表此处肌电信号的强弱,肌电信号越强越亮;同时可以观察到机器人与人体实时同步运动。为了分析图5(b)中人与机器人关节角度误差比图(a)和图(c)大的原因,截取了一段运动时间内的髋关节和膝关节角度数据,如下图所示。 图6中红蓝曲线分别代表外骨骼机器人在做协同行走运动时左右腿膝关节的角度随时间的变化情况,绿色和黄色曲线则代表左右腿的髋关节角度变化情况。可以看到,在步态发生相位变换时,膝关节会产生拐点,在此处导数不连续,导致角度预测算法在拐点前一帧仍按照以前的规律预测,在下一帧才修正。 5 结论 目前市场上大部分下肢外骨骼机器人运动是通过按钮控制,根据记录的运动轨迹主动带动人体下肢运动。本文设计了一种人机协同运动为驱动方式的下肢外骨骼机器人体系研究方案,阐述了满足该条件的机器人软硬件架构。在研究过程中,发现步态预测算法的角度误差对人机协同机制的流畅性有重大影响。通过三维计算几何的数学理论,设计了协同步态控制算法,并通过仿真环境对协同运动进行可视化观察和评估。由仿真结果可以看出,预测算法仍有很大改善空间。不足之处在于没有对上肢进行同态仿真,平衡上会导致不确定的误差,因此研究过程中仍应使用拐杖对测试人员进行有效保护。 参考文献: [1] 龙亿.下肢外骨骼人体运动预测与人机协调控制技术研究[D].哈尔滨:哈尔滨工业大学,2017. [2] Li Z Q,Xie H X,Li W L,et al.Proceeding of human exoskeleton technology and discussions on future research[J].Chinese Journal of Mechanical Engineering,2014,27(3):437-447. [3] Sankai Y. HAL: Hybrid assistive limb based on cybernics[C]// 13th International S-ymposium on Robotics Research. Berlin, Germany: Springer, 2010: 25-34. [4] Goffer A,Tamari O.Locomotion assisting apparatus with integrated tilt sensor:US10849816[P].2020-12-01. [5] 楊巍,张秀峰,杨灿军,等.基于人机5杆模型的下肢外骨骼系统设计[J].浙江大学学报(工学版),2014,48(3):430-435,444. [6] Brenner L.Exploring the psychosocial impact of ekso bionics technology[J].Archives of Physical Medicine and Rehabilitation,2016,97(10):e113. [7] 张孝强,王伟.智能可穿戴技术在军事医学领域的应用[J].医疗卫生装备,2019,40(5):90-95. [8] 郑凯,刘利利,王永奉,等.无动力下肢外骨骼机器人研究综述及发展趋势[J].机械传动,2021,45(4):166-176. [9] 周攀,杨勇,马磊,等.外骨骼机器人的人体步态感知系统设计[J].传感器与微系统,2016,35(10):82-85. [10] 王昌云,李立君.基于四元数的机器人手眼标定算法[J].传感器与微系统,2019,38(12):133-135. 【通联编辑:唐一东】
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
军事文摘(2023年12期)2023-06-12 07:52:44
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
数码世界(2017年8期)2017-12-27 00:28:32
中国科技纵横(2017年10期)2017-06-30 23:41:07
教育教学论坛(2016年8期)2016-02-23 14:55:41
发明与创新(2015年25期)2015-02-27 10:39:14
华东理工大学学报(自然科学版)(2014年5期)2014-02-27 13:49:35
智能系统学报(2012年6期)2012-01-27 14:31:39
