
沙滩清洁车振动筛物料颗粒动力学理论分析研究①
2022-08-31 12:18吴新烨陈家涌管泽庆曾令军
高技术通讯 2022年6期
吴新烨 陈家涌 管泽庆 曾令军
(厦门大学建筑与土木工程学院 厦门361005)
0 引言
振动筛分是较严格按照物料的几何尺寸进行的,具有严格的粒度界限。物料颗粒在筛面上的运动是实现筛分的前提,物料颗粒在筛面上的运动状况对筛分效果起着决定性的作用[1-2]。文献[3]系统地研究了物料在振动筛面上的运动,先后研究了单个颗粒在振动筛中的运动、粒子的运动速度对筛分性能的影响、物料的物理特性与筛分性能的关系、物料层的运动与筛分性能的关系。文献[4]研究了振动筛筛孔形状及布置对筛分性能的影响和物料进入筛选装置的状态对筛选效果的影响。文献[5]提出了单颗粒在筛面上运动的三种形式:相对静止、相对滑动和抛掷运动。文献[6]采用混沌运动理论对单颗粒物料在筛面上的运动进行了理论分析,得出颗粒在筛面上的运动存在非线性运动。文献[7]针对振动筛分过程机理进行阐述,并指出筛分过程的数学描述对筛分设备的优化设计具有重要的意义。文献[8]利用Matlab 和有限元软件创建分析模型,对ZKB1825 型振动筛的结构设计进行了优化调整。文献[9]采用离散元法分析了不同筛面长度和颗粒形态的筛分效率,发现筛分效率与筛面长度成正比,筛分物料为球形颗粒时有更高的筛分效率。
本文以沙滩清洁车振动筛网式筛分机构为研究对象,首先对筛面沙土运动进行理论计算,分析沙土正、反向滑动运动和抛掷运动的条件和影响因素,之后就振动筛分机构会出现大质量的物体短时滞留、部分垃圾相对筛面静止或反向滑动等不良工况进行了理论分析,找出相关原因,制定解决对策。
1 沙滩清洁车筛分机构原理及振动筛筛面沙土运动情况理论分析
1.1 沙滩清洁车筛分机构的原理分析
图1 为沙滩清洁车筛分机构的总装配图,其工作原理为:通过液压马达输出动力给主动滚筒,依靠主动滚筒4 与筛网5 之间的摩擦力带动振动筛网往复运动,将未透筛的垃圾和沙土输送到尾部液控垃圾倾倒箱中,通过筛网网孔漏沙以实现沙土的筛分与垃圾的输送。为了增加摩擦系数,同时防止海水腐蚀传动滚筒,往往在主动滚筒和从动滚筒圆周外表面包了一层橡胶。在网带之间等距离安装有激振辊14,加剧沙土的离散运动,利于沙土的透筛,激振辊由主动滚筒通过皮带轮传动。在主传动滚筒、从动滚筒附件安装了网带托辊16,在部分沙滩车的网带回程中部位置安装了张紧辊,并通过张紧弹簧来调节网带的张紧力,以改善筛分效果。

图1 筛分机构总装配图
1.2 振动筛筛面沙土运动情况理论分析
图2 为筛网式筛分机构基本原理图,网带沿着倾角为α0的斜面以速度V0往上反复地输送筛分;在回程的网带部分则安装了托辊5 和张紧辊3、4,其中张紧辊3 可根据筛分效果调节张紧力;激振辊的振动方向线与网带之间的夹角为φ。

图2 筛分机构筛分原理图
为了方便数学模型的建立,激振辊的外形选择为正弦式,激振辊对筛网任一位置点的工作位移都可用式(1)表示:

式中,λ为筛面沿振动方向单振幅,ω为激振辊圆周频率,t为时间,φ为振动相位角。
筛网在x方向自运动位移为

将筛网的合位移分解得:
x方向位移为

y方向位移为

对时间分别求一次、二次导可得网带在x方向和y方向速度和加速度分别为
x方向速度和加速度:

y方向速度和加速度:

拨沙机构使质量为m的沙土以速度V抛出,与水平方向成α角;其抛出位置与网带输出端的水平距离为L,垂直距离为H;网带与主动滚筒和被动滚筒的包角分别为β1、β2,沙土所受空气阻力为f。
沙土对筛面作相对运动,在x方向和y方向相对位移为Δx、Δy,相对速度为;相对加速度为。沙土的受力情况如图3所示。

图3 筛面上沙土的受力情况
沙土在x方向所受惯性力和重力的合力为

沙土在y方向作用于筛面的正压力为

其中G为沙土重力,m为沙土质量。
1.3 沙土正、反向滑动运动分析
当沙土相对工作平面做滑动时,应满足正压力F2≥0,相对加速度0;当沙土出现抛掷运动时,应满足正压力F2=0,沙土相对加速度≠0。沙土与筛面保持接触时,筛面对沙土的极限摩擦力为

其中“ +”号代表反向滑动,“-”号代表正向滑动。滑动开始时,沙土对筛面的相对加速度0;同时由于未出现抛掷运动,0。即有:

将式(6)代入式(9),将式(8)代入式(10),并将式(11)带入式(12)可得其运动方程为

其中f0=tanμ0(μ0为静摩擦角),G=mg
在这里,把沙土在筛面上开始出现正向滑动的激振辊的振动相位角定义为ϕz0。
由式(13),通过三角函数公式计算,可得正向滑动开始相位角ϕz0应满足:

相关参数值见表1。首先利用Matlab 软件,根据相关参数初值,研究各参数对于正向滑动开始相位角ϕz0的影响情况,之后研究双参数对于正向滑动开始相位角ϕz0的复合影响效果。沙土静摩擦角μ0、筛面倾角α0、筛面振动方向角δ对正向滑动开始相位角ϕz0的影响如图4~图8 所示。
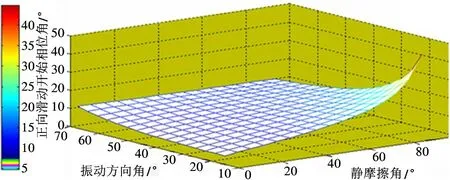
图8 μ0 与δ 对正向滑动开始相位角ϕz0的正交影响
表1 参数值
从图4 和图5 可看出,沙土的静摩擦角越大,就越有可能出现正向滑动,这就是沙土中易拉罐、酒瓶等不易正向滑动筛分的原因所在。相比,振动方向角与筛面倾角则不同,振动方向角在0~60 °之间时,沙土在筛面上出现正向滑动的开始相位角基本不变;当大于60 °时,沙土则开始出现正向滑动延迟。而筛面倾角在0~65 °之间时,沙土在筛面上出现正向滑动的开始相位角随筛面倾角增大而增大;当大于65 °,由于沙土的静摩擦渐渐转化为动摩擦,相位角则基本不变。同时,从图中亦可看出,更利于沙土正向滑动的参数依次为振动方向角、筛面倾角和静摩擦角。

图4 正向滑动开始相位角φz0与μ0 的关系

图5 正向滑动开始相位角ϕz0与α0、δ 的关系
静摩擦角、振动方向角与筛面倾角的正交影响如图6~图8 所示。从结果可知,如果仅考虑要使所有沙土正向滑动,改变振动方向角和筛网材料决定的静摩擦角更有利,筛网上沙土正向滑动的开始相位角在很小的范围内变化。

图6 α0 与δ 对正向滑动开始相位角ϕz0的正交影响
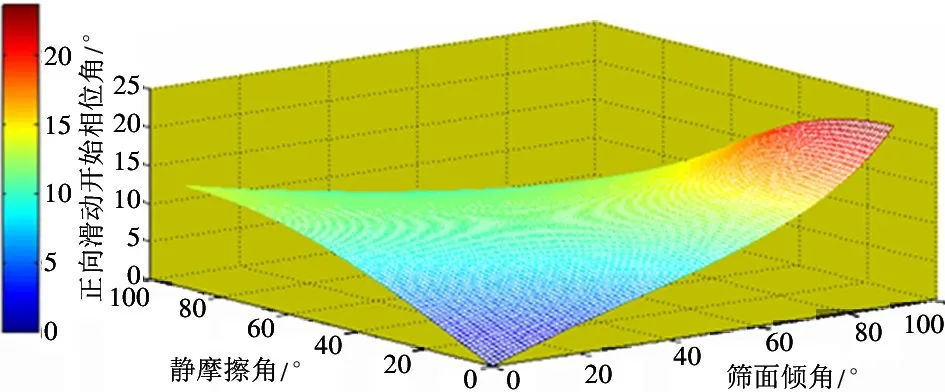
图7 α0 与μ0 对正向滑动开始相位角ϕz0的正交影响
在这里,把沙土在筛面上开始出现反向滑动的激振辊的振动相位角定义为ϕf0。故可得,沙土在筛面上开始出现反向滑动的相位角ϕf0应满足:

类比正向滑动开始相位角ϕz0,利用Matlab 软件,可得沙土静摩擦角μ0、筛面倾角α0、筛面振动方向δ对反向滑动开始相位角ϕf0的影响如图9~图13 所示。
从图9~图10 可看出,沙土的静摩擦角越大,就越不容易出现反向滑动。振动方向角对于抑制沙土的反向滑动作用不如筛分倾角明显。从静摩擦角、振动方向角与筛面倾角的正交影响图(见图11~13)来看,改变振动方向角或筛面倾角和筛网材料更利于沙土在筛面的反向滑动。

图9 反向滑动开始相位角ϕf0与μ0 的关系

图10 反向滑动开始相位角ϕf0与α0、δ 的关系

图11 α0 与μ0 对反向滑动开始相位角ϕf0的正交影响

图12 α0 与δ 对反向滑动开始相位角ϕf0的正交影响

图13 μ0 与δ 对反向滑动开始相位角ϕf0的正交影响
1.4 沙土正、反向滑动运动条件分析
一方面从提高沙滩清洁车筛分能力的角度出发,沙土在筛面上正向滑动是有利的;另一方面为改善沙土在筛面上的筛分效果,沙土在筛面上停留的时间越长筛分效果也就越好。因此沙土在筛面上的正向滑动应结合这两方面综合考虑。由于μ0∓α0=0°~180°,μ0∓δ=-90°~90°,因此均为正值。沙土在筛面上开始正向滑动,则必须满足条件:

为防止沙土在筛面开始出现反向滑动则必须满足条件:

当沙土在筛面上正向滑动后,其运动方程可表示为

其中f1=tanμ1为动摩擦系数(μ1为动摩擦角)
将式(6)、(8)、(10)代入式(18)积分可得沙土在x方向上正向滑动时,初始条件为t=0,Δx=0,沙土相对筛面的速度为
将对时间t积分可得沙土相对筛面的运动位移Δx为
其中ϕs为沙土开始滑动ts时刻的初始相位角。沙土正向滑动过程中,沙土相对筛面的平均速度为

其中ω为筛面振动的圆周频率。
同理,当沙土在筛面上反向滑动后,初始条件为t=0,Δx=0,根据运动方程可得沙土在x方向上反向滑动时,沙土相对筛面的速度为

将对时间t积分可得沙土相对筛面的运动位移Δx为

沙土反向滑动过程中,沙土相对筛面的平均速度为

1.5 沙土抛掷运动分析及其运动条件
沙土在筛面上开始出现抛掷运动时,在y方向相对加速度和正压力应满足:
即可求得开始出现抛掷运动的相位角ϕP为

利用矩阵分析软件Matlab 可给出筛面倾角α0、筛面振动方向δ对抛掷运动开始相位角ϕP的影响,结果如图14 和图15 所示。
从图14 可看出,筛面倾角在较小值时,对抛掷运动开始相位角影响较大,反观振动方向角越大越有利于抛掷运动的出现。从图15 可以看出,振动方向角和筛分倾角在一定范围内选取时,沙土在筛面上均会出现比较规律的抛掷运动。由式(27)可知,要使沙土在筛面上开始出现抛掷运动,则必须满足条件:

图14 α0 和δ 对抛掷运动开始相位角ϕP 的影响
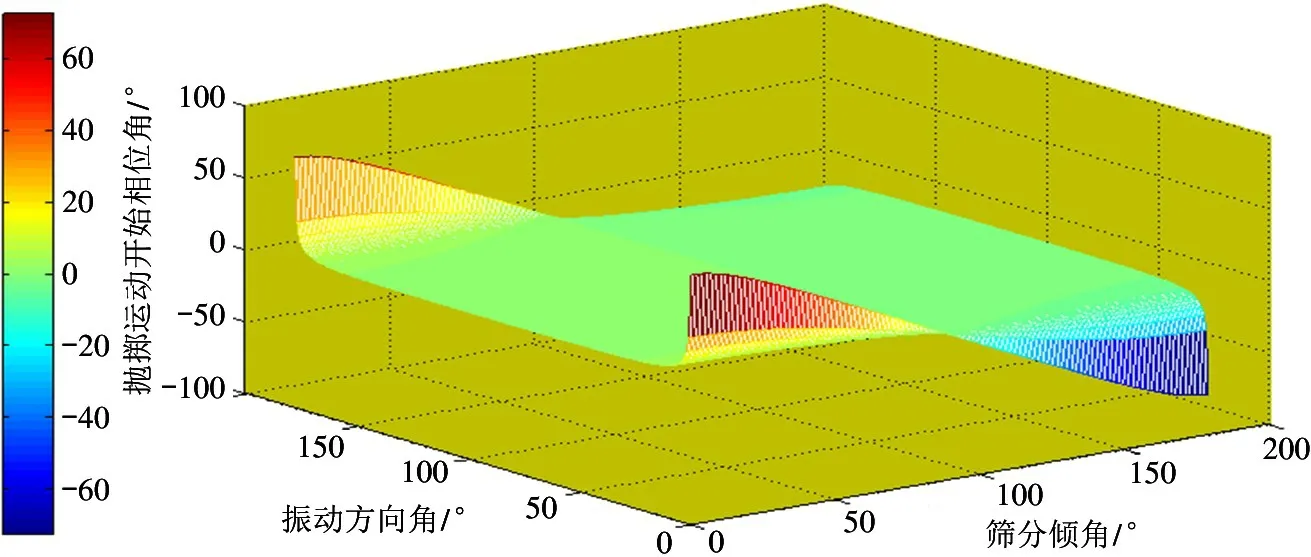
图15 α0 和δ 对抛掷运动开始相位角ϕP 正交影响

当沙土离开筛面,由式(10)可得沙土在垂直于筛面方向的相对运动方程为

对时间t积分,初始条件为t=0,;求得沙土相对于筛面垂直方向运动速度为

由式(30)对时间t积分可得沙土在y向相对位移Δy为

当沙土在筛面上y向相对位移Δy重新为0 时,抛掷运动结束,此时的振动相位角为ϕpj,ϕpj与ϕp之间的差值记为θP,由式(31)可求得ϕpj与ϕp之间的关系为

沙土离开筛面后,沿x向运动方程为

对时间t积分,初始条件为t=0,;代入式(6)求得沙土在x向相对运动速度为

由式(35)对时间t积分可得沙土每次抛掷运动时相对位移Δx为
此时,沙土进行抛掷运动的理论平均速度为

2 筛分过程不良工况原因及对策
2.1 垃圾在筛面上反向滑动或相对静止不能输送的原因分析及对策
研究发现,沙滩清洁车上的筛分机构在使用过程中,有大质量的石头等垃圾在垂直于网带的方向上反复跳动,振动网带对这些大质量的物体输送筛分困难。
(1)若沙土相对筛面静止,即沙土在筛面上没有相对滑动,则应满足条件:
由式(38)可知,沙土在筛面上出现相对静止的原因与物体质量的大小无关,而是与f0、δ、α0、ω和λ有关,因此沙土中部分垃圾在筛面上出现不能够输送筛分的原因是由于垃圾与筛面的静摩擦系数过大。其解决方法可以从两个方面考虑:一是尽可能准确地确定垃圾与筛面的静摩擦系数,从而选择更恰当的相关运动学设计参数;二是根据垃圾与筛面的静摩擦系数,利用材料特性减少静摩擦系数,或增大λ、ω、δ和α0。从理论计算上来看,如此处理即可避免此不良工况的出现。
(2)若沙土在筛面上出现反向滑动,则应满足条件:

同样从式(39)可得出,沙土在筛面出现反向滑动的原因与物体的质量大小无关,而是与f0、δ、α0、ω和λ有关。若沙土在筛面上出现反向滑动,不利于提高振动筛的筛分能力,但是从筛分效果来看,反向滑动增加了沙土在筛面上的透筛时间及频率,有利于沙土分离,改善对湿沙的筛分效果。
2.2 垃圾在筛面同一位置上反复跳动的原因分析及对策
部分垃圾在筛面上出现短时反复跳动时,若沙土中有大量此类垃圾,就会造成筛分效率下降,容易发生瞬间堵塞塞孔,因此这种情况需要引起重视。沙土在筛面上开始出现抛掷运动,则必须满足如下条件:

从式(40)中可知,沙土在筛面上出现抛掷运动与物体质量的大小和筛面的摩擦系数无关。δ、α0、ω和λ决定着沙土在筛面的抛掷运动规律。部分垃圾出现短时反复跳动的原因是,这些垃圾一般是体积和质量较大的个体,在筛面上与其他垃圾容易发生接触碰撞。对于这样的情况,可以从两方面考虑,一是在保证筛分效率不变的情况下,增加筛面的工作宽度和长度,尽量避免沙土中各种垃圾成分之间的碰撞对垃圾运动轨迹的影响;二是增大振动筛的振幅和振动圆频率,使沙土发生碰撞的时间延迟或滞后,但是增大振动筛的振幅和振动圆频率会使筛分机构的振动强度增加,降低振动筛的使用寿命。
3 结论
通过建立数学模型,对筛面上的沙土进行运动学和动力学相关的理论计算,分析沙土在筛面上的运动情况。对沙土在筛面上会出现的正向滑动、反向滑动以及抛掷运动产生的条件进行了计算分析,通过Matlab 软件给出了筛分倾角、静摩擦角、振动方向角等设计参数分别对3 种运动情况的影响以及相互之间的正交影响,从而为振动筛的设计提供参数的选择依据。此外,对于振动筛分机构的不良工况进行了理论计算和阐述,并提出了解决这些问题应采取的办法及措施。
猜你喜欢
护理研究(2022年8期)2022-05-19
橡塑技术与装备(2022年3期)2022-03-17
机械研究与应用(2022年1期)2022-03-14
青年文学家(2021年22期)2021-09-09
世界有色金属(2020年13期)2020-12-08
河南医学研究(2020年27期)2020-10-18
读者·校园版(2020年20期)2020-10-13
科学技术创新(2020年17期)2020-06-30
文萃报·周五版(2019年12期)2019-09-10
散文选刊·下半月(2018年2期)2018-02-23
