
光伏功率扰动下的水电机组海鸥优化模糊PID控制研究*
2022-08-31 00:46邹屹东贾高杰李立胜
电机与控制应用 2022年7期
曹 飞, 钱 晶,2, 邹屹东, 曾 云,2, 贾高杰, 李立胜
(1.昆明理工大学 冶金与能源工程学院,云南 昆明 650093;2.云南省高校水力机械智能测试工程研究中心,云南 昆明 650093)
0 引 言
由于光伏发电的输出功率容易受到光照和温度的影响,其输出具有随机性和波动性的特点,在并网方式下会对电网的稳定运行产生影响[1]。为确保系统能够吸收最大的光伏发电量。需要使用其他电源来补偿其输出,使光伏发电和其他电源的发电量总和等于区域负荷所需的电力供应,从而实现系统的电力供需平衡[2]。中国水电资源丰富,水电装机容量居世界第一,对水能的利用有非常成熟的技术基础。水电作为光伏发电的补充电源,因具有灵活的调节特性可以用来抑制光伏输出的波动,使水光总出力保持恒定[3]。
目前水电机组一般采用PID控制规律。但是在一些工况多变的情况下,固定的PID控制方法可能无法保证水力发电系统的稳定性要求,因此需要对传统的PID控制策略加以改进。徐昕等[4]将实数型遗传算法用于对水轮机PID控制参数进行优化,避免了传统遗传算法在参数整定时容易陷入局部极小值的缺点。李星等[5]利用灰狼算法对采用PID控制的水电机组进行控制参数寻优,提高了水电机组跟踪补偿风电出力的能力。卢恒光等[6]利用模糊神经网络算法优化水轮机调节PID参数,有效提高了调节的精度。除了运用智能算法优化之外,也有一些学者采用智能控制与PID相结合的方法[7-8]。万瑞文等[9]将模糊PID控制运用于水轮机调节系统中,利用模糊控制的专家推理能力,在线调整PID控制系数,使系统具有良好的跟踪性能和较强的鲁棒性[10]。
海鸥优化算法(SOA)是Dhiman和Kumar在2019年提出的一种受生物行为启发的新智能优化算法[11]。该算法通过模拟海鸥种群的迁移和攻击行为来优化目标函数,具有良好的全局搜索和局部搜索能力。与常用的群体优化算法如粒子群优化算法和蚁群算法等相比,SOA算法实现简单,参数调整简单,收敛速度快,优化精度高。因此,常用于求解一些计算量较大的多目标优化问题[12-13],在一些实际的工程应用上也证明了其适用性[14]。与依靠单一的优化方式相比,本文同时引入海鸥智能算法和模糊控制对水电机组的PID控制参数进行优化,通过搭建MATLAB仿真模型,验证其在光伏功率扰动下的调节性能。
1 水光独立供电系统结构
水光独立供电系统由水光互补出力给系统中的负荷供电,通过维持系统功率供需平衡,使得整个系统频率稳定。本文采用水轮发电机组作为主要功率输出和调频设备,把水力发电和光伏发电作为系统的主要动力源。水光独立供电系统结构如图1所示。
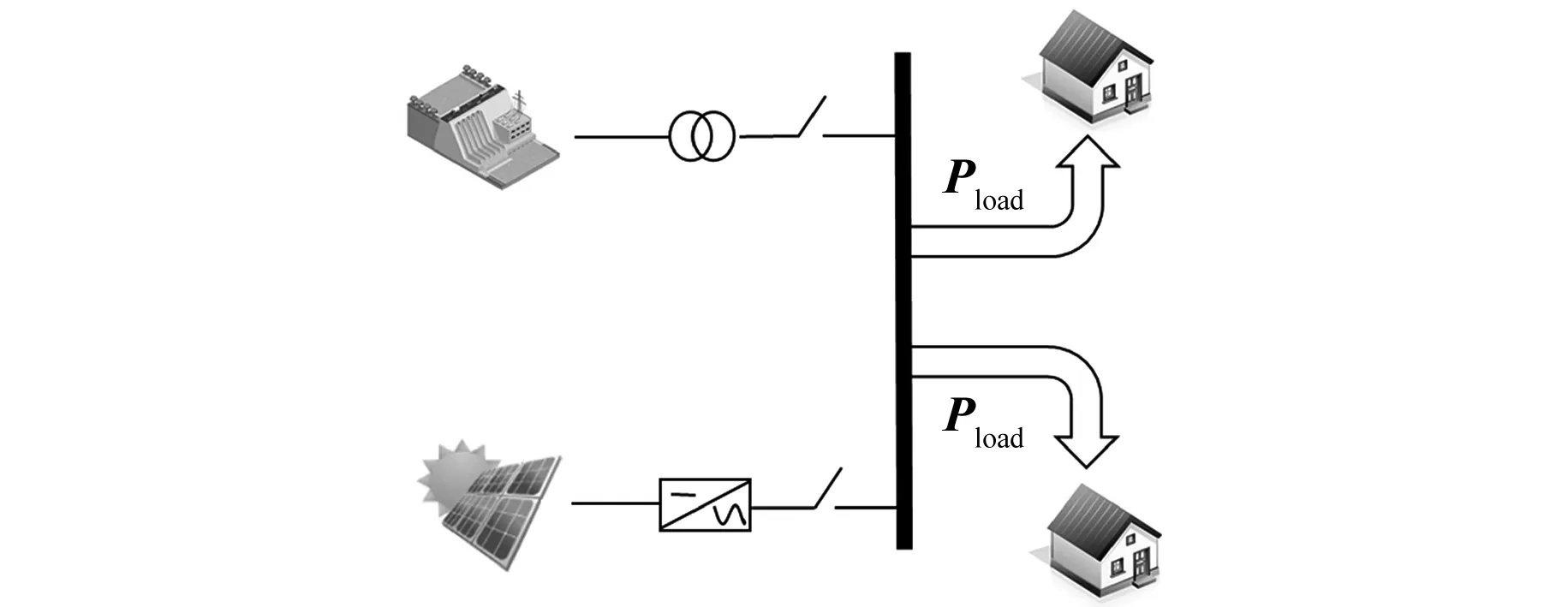
图1 水光独立供电系统简图
2 研究对象的数学模型
2.1 水轮发电机组数学模型
水轮发电机组是集引水过程、机械过程和发电过程于一体的复杂系统。水轮发电系统可分为3部分:调速器、原动机和发电机。调速器由控制器和电液随动系统2部分组成,原动机由水轮机和有压引水系统组成[15]。其结构图如图2所示。
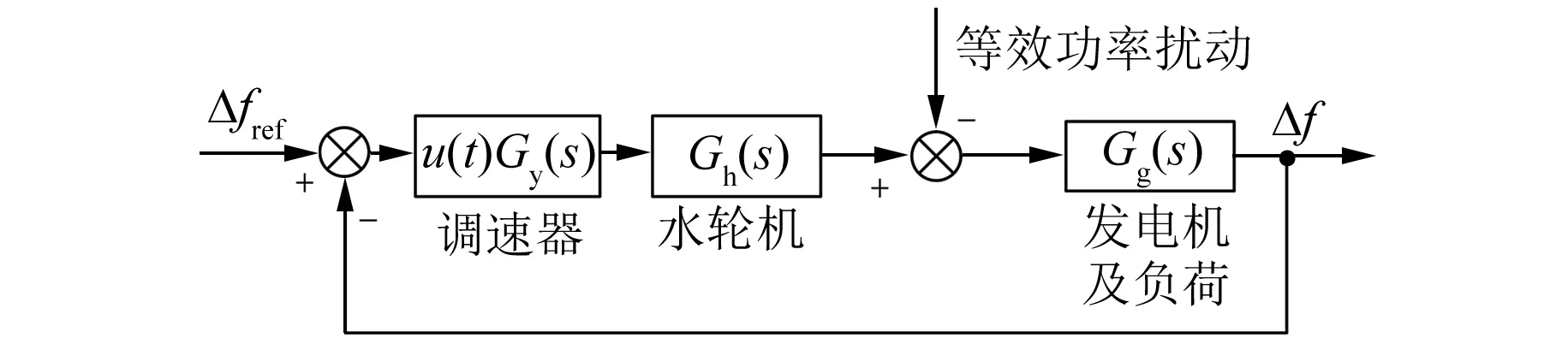
图2 水轮机调节结构图
水轮机调速器通过反馈系统频率偏差控制导叶开度以改变转速,图2中u(t)为PID输出控制信号。其线性电液随动系统传递函数为
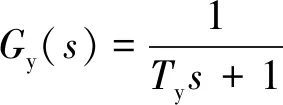
(1)
式中:Ty为水轮机接力器时间常数。
式(1)是一个以s为变量的代数方程,可以用来表示系统的动态特性。
当考察水轮机环节的能量转移函数时,本文采用水轮机IEEE非线性的模型,忽略水力摩擦及阻尼损耗,得到理想的水轮机传递函数描述为
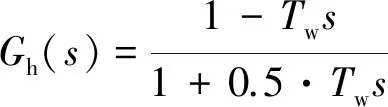
(2)
式中:Tw为水流惯性时间常数。
本文在考虑水轮发电机时,忽略了同步发电机绕组的动态特性和转子功角特性,只考虑了转子的运动方程。相应的一阶发电机模型和负载传递函数如下:
(3)
式中:M为水轮发电机机械惯性时间常数;D为水轮发电机自调节系数。
2.2 光伏发电机组数学模型
光伏电池的发电原理是基于半导体的光伏效应将太阳能转换为电能[16]。光伏电池中的PN结在光照下会产生电流,产生的电流通过理想二极管和内阻。光伏电池的模型如图3所示,主要包括一个串联电阻和一个并联的内部电阻、并联二极管和光生电流源。
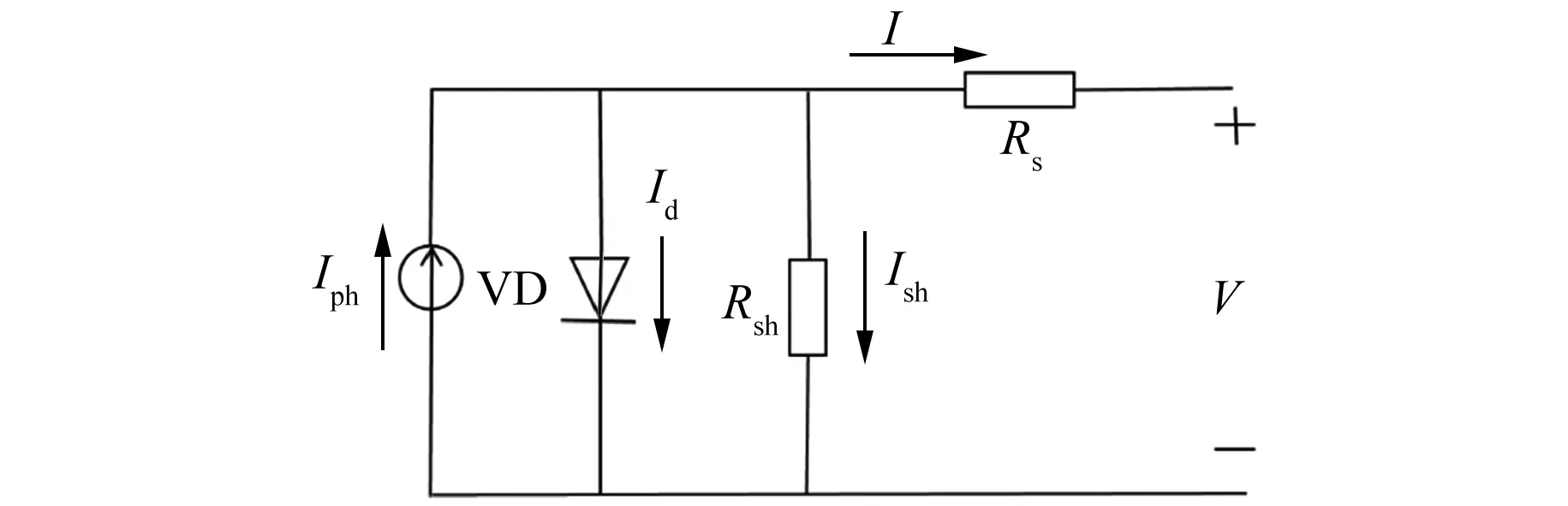
图3 光伏电池等效模型
图3中,Iph为光生电流源的输出电流,Id为流经二极管的电流值,Rsh为光伏电池并联电阻,Ish为流经并联内电阻的电流,Rs为光伏电池串联内阻,I、V分别为光伏电池的输出电流和输出电压。
计算流过二极管电流的Id表达式为
(4)
式中:I0为二极管的反向饱和电流;N为PN结的理想因子;q为电子电荷;K、T分别为波耳兹曼常数和光伏电池实际工作温度;Vou为光伏电池的开路电压。
光伏电池的外特性为输出电流I和电压V之间的关系,由其等效模型可以得出:
I=Iph-Id-Ish
(5)
Vou=V+IRs
(6)
(7)

(8)
式中:G为太阳辐射系数;Iscr为参考条件下光伏电池的短路电流;KI为断路电流温度效应系数。
I与V是光伏电池的主要电气特性,光伏电池的I-V输出曲线会受到环境光照和温度的影响。在每组I-V函数曲线中,当I=0时表示光伏电池所连接的外电路开路,此时V为光伏电池的开路电压,用Vou表示;当V=0时,表示光伏电池被短路,此时的I为光伏电池的短路电流,用Iscr表示[17]。每条I-V曲线中均存在唯一的功率最大值点,称为光伏电池的最大输出功率点(MPP)。
2.3 水光独立供电系统数学模型
水光供电系统动态模型如图4所示,包括水轮机组、同步发电机、光伏机组、负荷和控制器等。在本文中,光伏发电机组采用最大功率点跟踪(MPPT)控制。
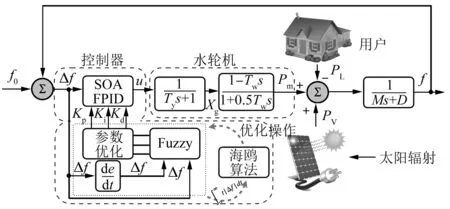
图4 水光独立供电系统频率调节模型
图4中,Δf为系统频率偏差,u为控制器的输出信号,Xg为导叶调节角度,Pm为水轮机输出功率,PV为光伏发电输出功率,PL为系统的负荷。将PV与PL的偏差,作为水电机组调频模式下的功率扰动输入项。SOAFPID控制器控制水电机组的出力进行功率补偿使系统频率偏差尽可能趋向于0,从而维持供电系统的频率稳定。
3 海鸥算法优化模糊PID控制器设计
3.1 模糊PID控制器
模糊PID控制器就是模糊推理在传统PID控制中的应用,主要由3部分组成:模糊处理、模糊推理和去模糊化。工作时,将输出结果与参考值进行比较得出被控对象的输出偏差e和偏差变化率ec可作为模糊推理的输入变量,通过模糊规则设置输出PID的3个控制参数,完成模糊PID控制[18]。通常模糊PID控制规则大部分依靠专家经验法或采用试凑法来进行制定,一定程度上容易受到主观影响。在大波动暂态过程中存在控制误差较大的情况,难以达到控制要求下的最佳效果,在一些特殊情况下还会发生较大的误差。在选取模糊推理隶属度函数的过程中也会出现类似的情况。
3.2 海鸥优化算法
海鸥优化算法是一种基于海鸥迁移和攻击行为的群体智能随机搜索算法。海鸥算法在进行优化操作时,将每只海鸥视为d维搜索空间中的一个搜索个体。海鸥通过迁徙和攻击不断更新其位置。在海鸥优化算法中,每只海鸥个体包含以下元素:每只海鸥自身的位置、搜索到的海鸥群体全局最优位置Pbs和海鸥位置对应的适应度值[19]。迁移行为和攻击过程如下所述。
3.2.1 迁徙行为
迁徙指的是海鸥位置移动变换的过程,体现为算法中的全局搜索阶段。对这一阶段建立数学模型时,需满足以下3个条件:
(1) 避免碰撞。为了避免海鸥之间在迁徙时发生碰撞,通过变量A来调整海鸥的位置:
Cs(t)=A·Ps(t)
(9)
式中:Cs(t)为不与其他海鸥发生碰撞的新位置;A为海鸥在给定搜索空间中的运动行为;Ps(t)为海鸥当前的位置;t为当前迭代次数。
A的值是通过fc线性调节的,fc可以控制变量A的频率,fc值从2线性降低到0。A的计算公式如下:
A=fc-t·(fc/Dmax)
(10)
式中:Dmax为最大迭代次数100。
(2) 向最佳位置移动。在避免与其他海鸥重叠后,海鸥会朝着最佳位置的方向移动。最佳海鸥所在的方向Ms(t)为
Ms(t)=B·[Pbs(t)-Ps(t)]
(11)
式中:Pbs(t)为最佳海鸥所在的位置;B为负责平衡算法全局和局部搜索的随机数,B=2·A2·rand,rand为[0, 1]范围内的随机数。
(3) 靠近最佳位置。Ds(t)表达式为
Ds(t)=|Cs(t)+Ms(t)|
(12)
3.2.2 攻击行为
海鸥在迁徙过程中进行捕猎时会不断改变攻击角度和速度,利用翅膀和体重来保持高度。当海鸥攻击猎物时,会在空中盘旋移动[20]。攻击行为反映了海鸥的局部搜索过程,在此过程中,海鸥在x、y、z平面的运动行为描述如下:
Ps(t)=Ds(t)xyz+Pbs(t)
(13)
式中:x=r·cos(θ),y=r·sin(θ),z=r·θ,r为螺旋半径,r=ueθv,θ为[0,2π]范围内的随机角度值,u和v为螺旋形状的相关常数,在本例中均取值为1;Pbs(t)为最佳海鸥位置,海鸥攻击的位置就是最终的位置。
3.2.3 海鸥算法寻优适应度函数
为了缩短调整时间,本文采用工程实用性强、选择性好的ITAE指数作为海鸥算法的适应度评价函数:

(14)
式中:t为仿真时间;e(t)为频率误差。
3.3 海鸥算法优化模糊PID控制器
为克服传统模糊PID方法的缺点,本文将海鸥算法引入模糊PID控制当中,通过优化模糊控制器输出PID调整参数的比例系数来整定最终输出的PID控制值。本文中的PID控制器采用位置式PID。其原理如图5所示。
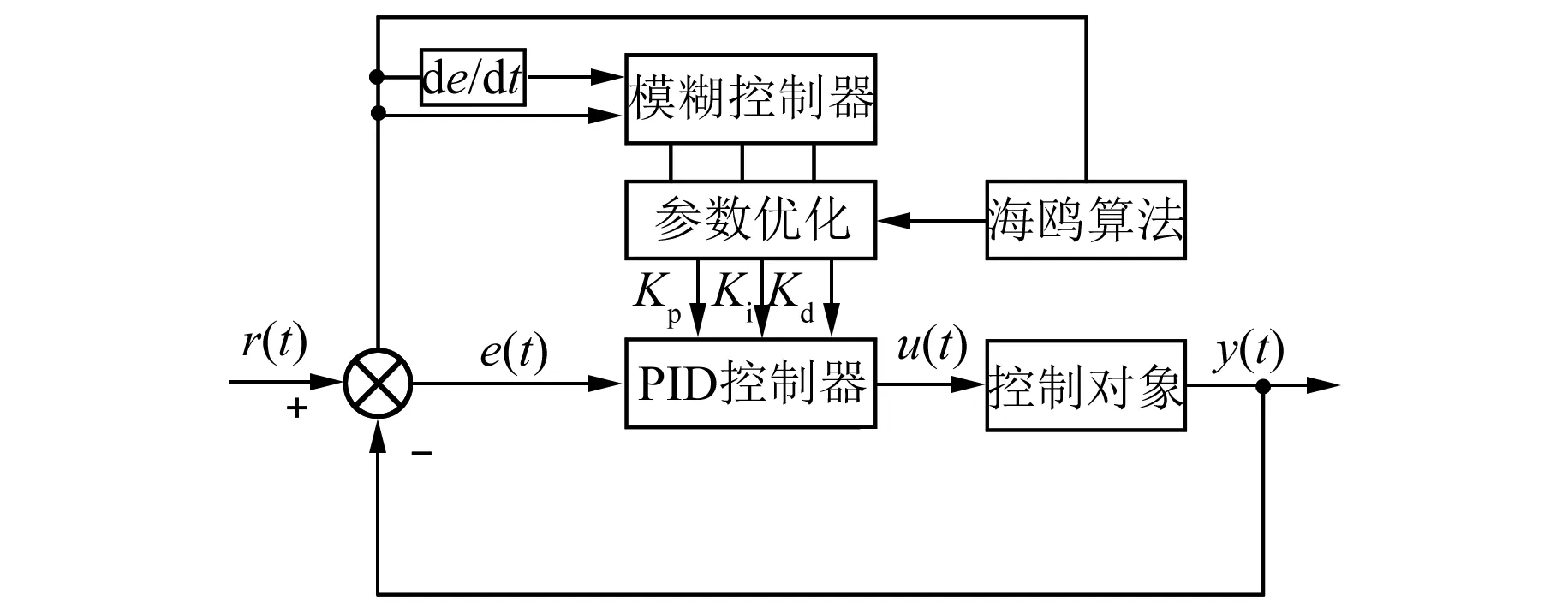
图5 海鸥算法优化模糊PID原理图
图5中的r(t)为给定的参考值,y(t)为实际的输出值。本文采用的是2×3的模糊推理系统,控制器有2个输入量和3个输出量。输入量为系统频率偏差值e和偏差变化率ec,输出量为PID参数的调整量ΔKp、ΔKi、ΔKd,输入量和输出量的论域范围皆为[-3,3]。模糊子集分为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)7个评判等级。输入量e、ec,输出量Δkp、Δki、Δkd的隶属度函数采用常用的三角函数,控制规则库根据PID控制特点制定。为了与传统的PID控制进行对比,设定传统PID的3个控制参数为Kpc、Kic、Kdc,海鸥模糊整定在其基础上优化。根据本控制系统应用环境,对于PID控制中的3个控制参数取值范围限定为Kp=[0,10],Ki=[0,5],Kd=[0,5]。模糊整定后引入海鸥算法对PID参数进行二次整定,海鸥算法的种群规模设为50,迭代次数为100,d值为3,海鸥的搜索空间上下限设置为[-10,10],仿真时长t为100 s执行流程图如图6所示。
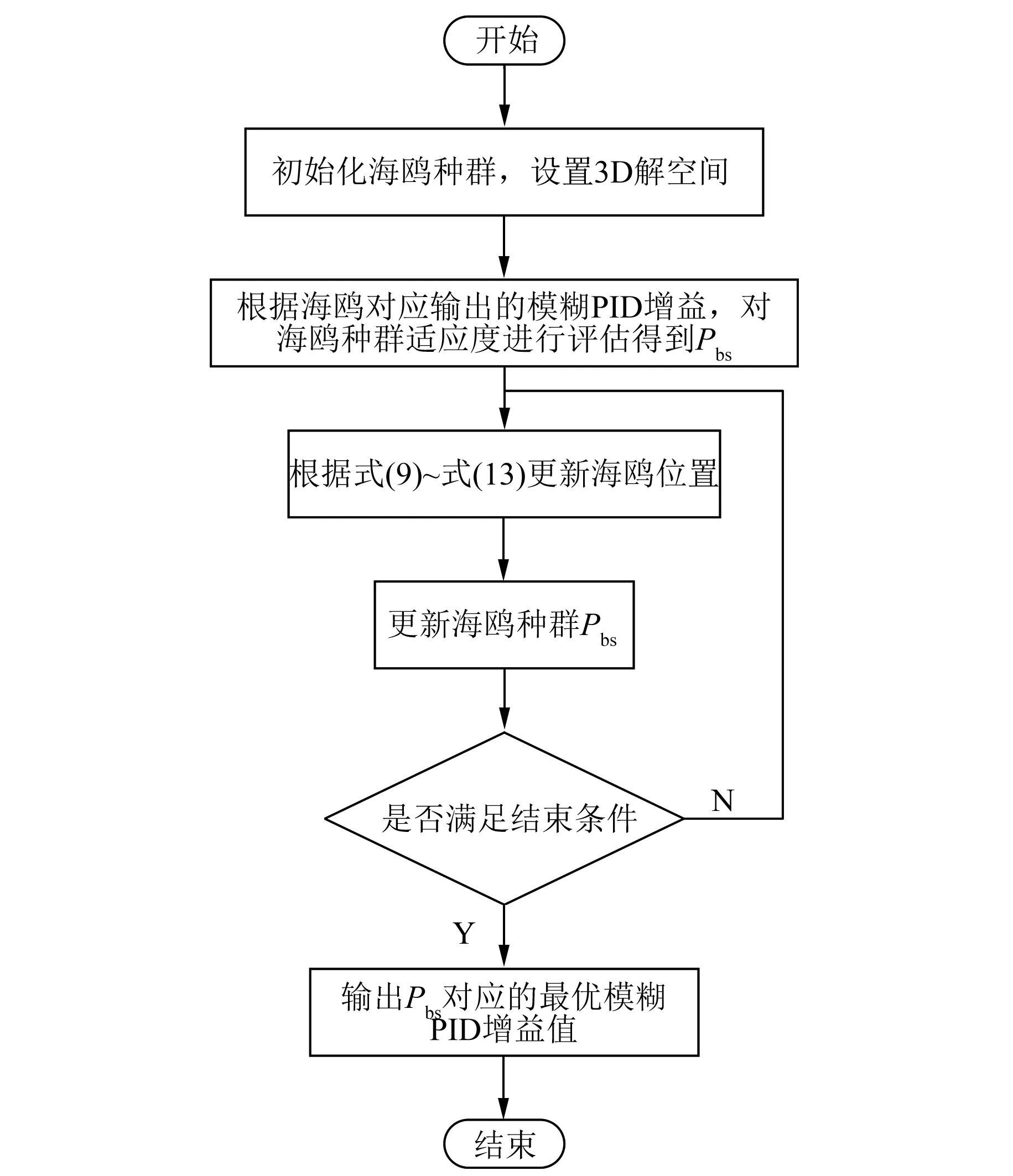
图6 海鸥算法寻优流程图
经海鸥算法运算可以得到Kp、Ki、Kd的调整量增益参数:Ckp、Cki、Ckd。得出最后PID控制器输出量u(t)的表达式:

(15)
其中,修正后的3个控制参数为Kp=Kpc+Ckp·ΔKp;Ki=Kic+Cki·ΔKi;Kd=Kdc+Ckd·ΔKd。
PID控制器将伴随着系统的扰动和输入频率偏差的变化,完成参数值的调整,从而实现PID参数值的在线自动调整过程,有效改善了系统的调节特性。
4 算例仿真研究
本文采用MATLAB/Simulink平台搭建基于SOAFPID控制的水光独立供电系统频率控制模型。分别对4种不同工况进行控制对比分析,通过主程序调用海鸥算法和Simulink模型运行。仿真结果均采用标幺值形式。仿真参数设定如表1所示。

表1 仿真参数对照表
4.1 开机工况下的负荷频率响应仿真
对水轮机开机工况的频率响应输出进行仿真分析。纵坐标为水轮机单独供电时的系统频率标幺值。由图7可以看出,采用SOAFPID控制的水电机组的系统频率响应速度快于PID,在10 s内就能使系统频率稳定,最大超调量只有3%。而采用常规PID控制的最大超调量达到12%,且需要30 s才能使频率追踪到系统稳定状态。
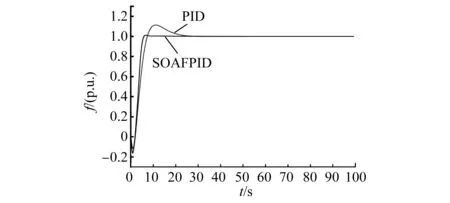
图7 水轮机组开机工况频率响应
4.2 负荷扰动工况下的仿真
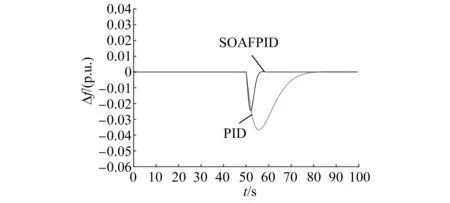
图8 在10%功率扰动下的稳定响应
为了保证光伏的最大出力,系统的负荷扰动由水电机组进行调节。图8为10%负荷功率波动工况下系统频率偏差响应曲线。当突然出现负荷增加时,系统的频率会下降。当频率偏差为0时,代表系统达到供电稳定状态。由图8可看出,在相同的负荷扰动条件下,基于SOAFPID控制的水电机组具有更好的干扰抑制响应特性,系统的频率偏差最大超调量为0.025 p.u.,且在此后不到10 s的时间内就能使系统频率快速上升达到稳定值,而传统PID控制的超调量达到了0.038 p.u.,比SOAFPID控制高了约13%,且调节时间达到了30 s。可见采用SOAFPID控制的水电机组系统抗干扰能力明显优于传统PID控制。
4.3 负荷和光伏同时扰动工况仿真
为了验证SOAFPID控制下的水电机组在光伏和负荷同时出现变化时的调节效果,本文设计了图9 所示的多阶跃变化作为光伏和负荷的扰动输入项,取扰动频繁的阶段进行仿真对比分析。由仿真结果可得:在出现频繁功率扰动的工况下,采用SOAFPID控制的水电机组能较好地抑制系统频率波动,其产生的超调量比传统PID控制平均要低了1/3,且响应速度很快,基本能在10 s内使系统的频率偏差恢复到0的状态。而采用传统PID控制的系统响应速度慢,在短期频繁干扰下很难使系统频率恢复到稳定状态。
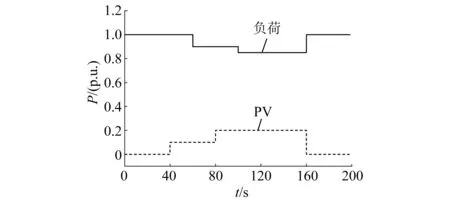
图9 光伏出力和负荷的功率变化
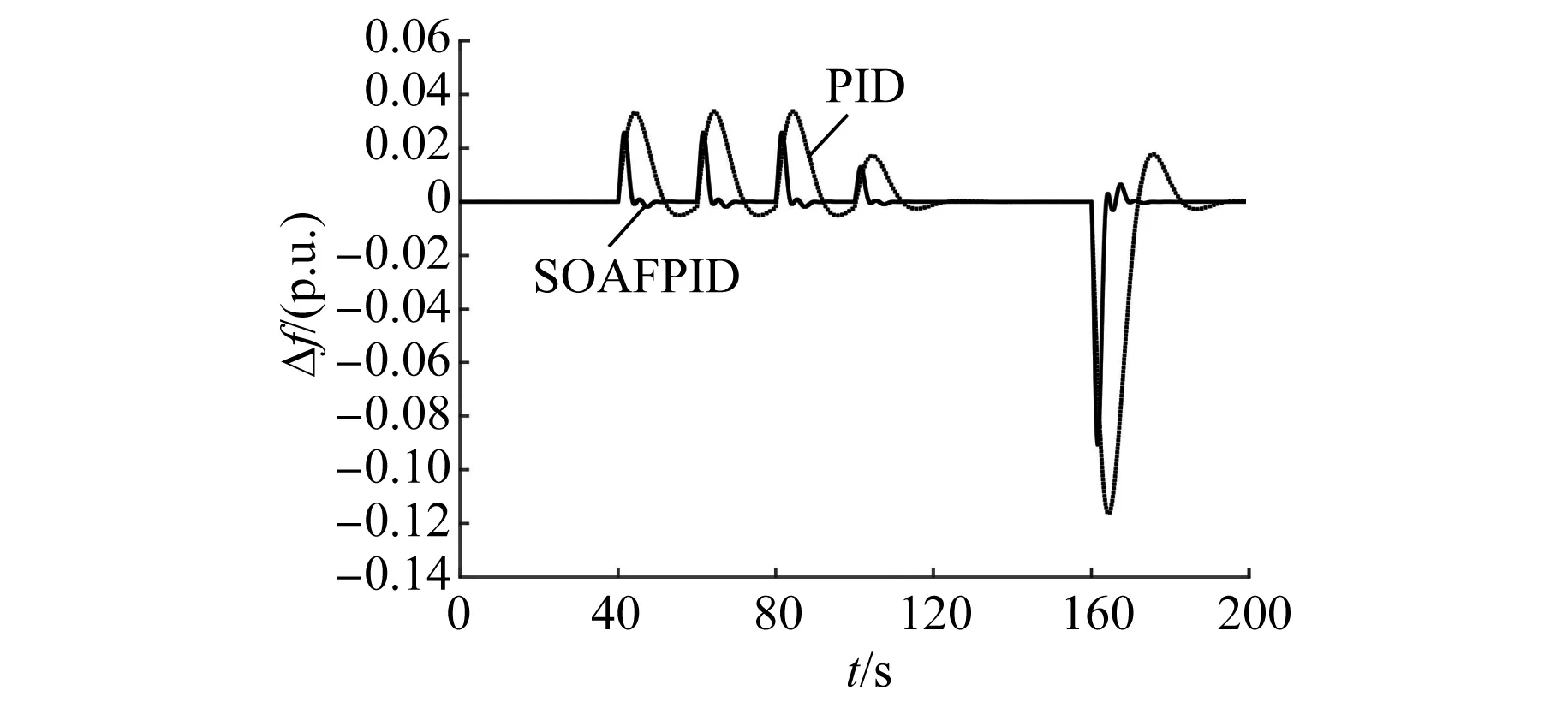
图10 光伏和负荷同时波动下频率偏差响应
4.4 实际光伏功率波动工况仿真
维持水光独立系统供电平稳最大的障碍在于光伏出力的频繁变化。本文选取江苏某光伏电站的典型日出力曲线作为实际光伏发电功率,取值间隔为5 min,采集数据点300个,利用水电出力进行光伏补偿。
由图11可知,光伏出力有着明显的昼夜差别,出力变化最频繁的为日间时段,故本文主要研究在日间的出力补偿特性。由图12可以看出,在光伏出力波动频繁的情况下,SOAFPID调节比传统PID调节具有更加快速的响应能力,能够使系统的频率偏差基本控制在±0.02 p.u.范围内,最大超调量为0.029 p.u.。而传统PID控制的最大超调量达到了0.053 p.u.,且波动频繁,稳定时间较长。说明引入SOAFPID控制后水电机组能够更好地对光伏机组进行功率补偿,整个系统供电更加平稳。与传统PID调节相比,SOAFPID水电机组对整个供电系统的频率调节能力得到明显提升。
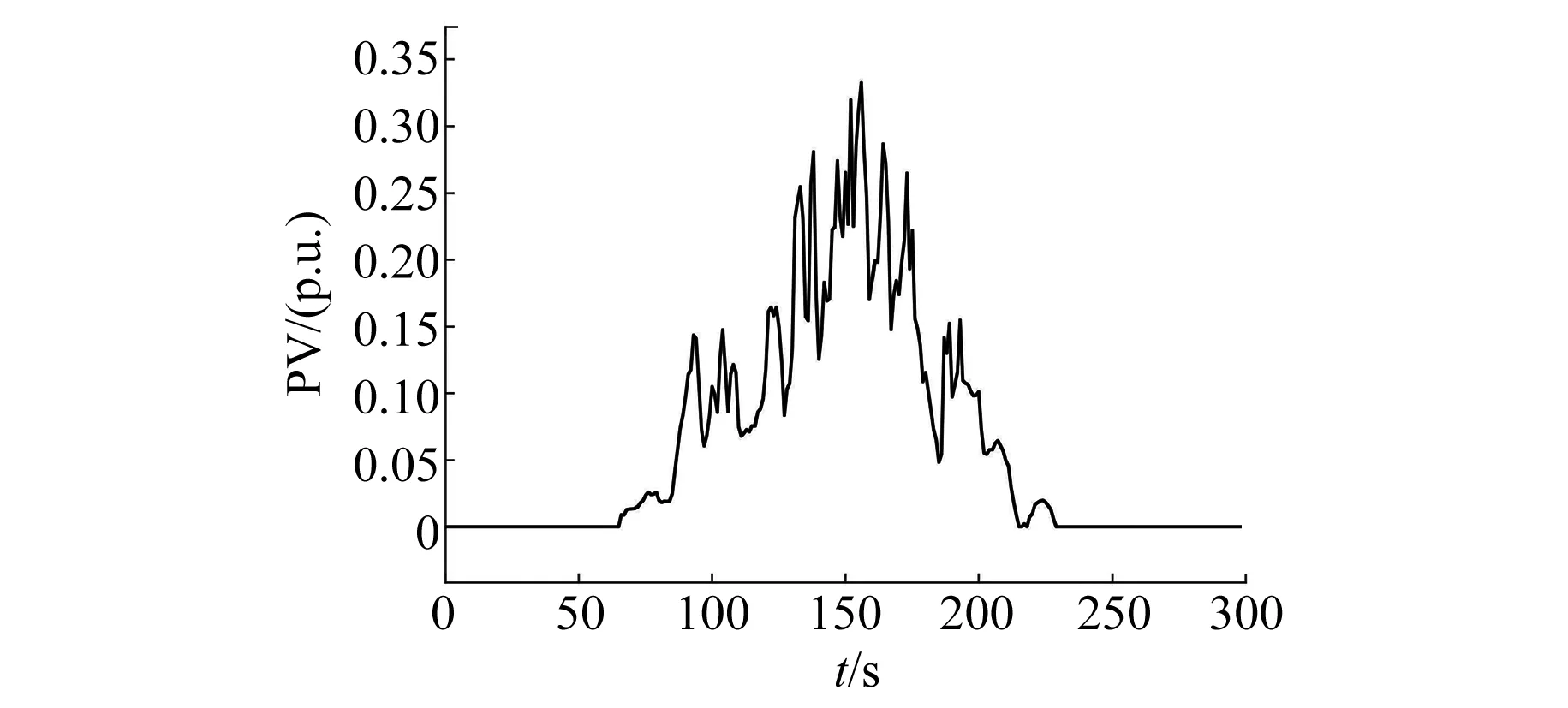
图11 典型日光伏出力曲线
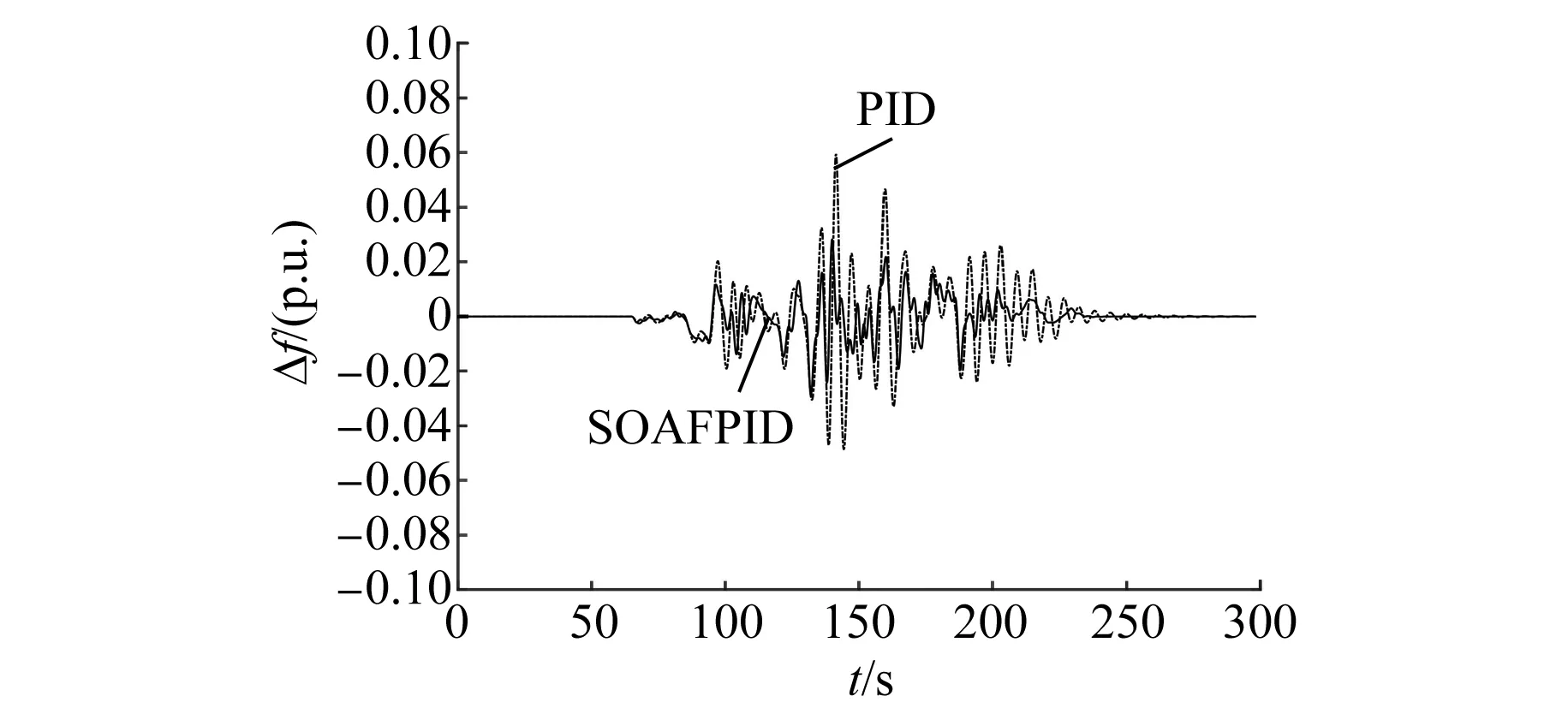
图12 实际光伏发电功率波动工况频率偏差响应曲线
5 结 语
本文通过采用海鸥算法对模糊PID控制器的控制参数进行寻优迭代,设计出SOAFPID控制器。并将其运用到水光独立供电系统的水电机组控制当中。经过仿真研究后得出,与传统PID控制相比,在水电机组调节系统调频模式中引入SOAFPID控制器,水电机组具有更好地功率输出性能和鲁棒性。可以有效、快速地补偿光伏发电的功率波动,使得水光电协同运行系统的频率保持平稳,有利于发挥光伏发电等新能源发电的作用,对于充分利用新能源具有重要意义。
猜你喜欢
水利水电快报(2022年8期)2022-11-23
小哥白尼(野生动物)(2022年5期)2022-08-15
大电机技术(2022年3期)2022-08-06
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
建材发展导向(2021年22期)2022-01-18
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年11期)2021-07-28
幼儿智力世界(2019年12期)2019-10-26
能源(2018年7期)2018-01-15
