无人机摄影测量在房地一体化调查中的应用
2022-08-30 02:40:54王姜华曾娟娟何仁德
科技创新与应用 2022年23期
刘 娣,王姜华,曾娟娟,何仁德
(1.湖南城建职业技术学院,湖南 湘潭 411100;2.湖南智强工程技术有限公司,长沙 410000;3.湖南虹康规划勘测咨询有限公司,长沙 410000)
随着全国各地房地一体化调查项目迅速地开展,无人机摄影测量在房地一体化调查中起到了非常重要的作用[1]。不动产测量是房地调查项目中一项非常重要的工作,大部分不动产测量采用的还是传统的测量手段,如GPS-RTK、全站仪等,存在的问题有:房子密集、通视效果差,很多地方不易到达。而房地一体化调查项目范围大,工期紧,因此外业工作量极大,人力成本也高,工期长,效率低等,如果利用无人机摄影测量将在满足项目技术要求的前提下大大缩短项目工期从而及时完成房地一体化调查项目。
1 无人机航测的应用
无人机航测是指在无人机上安装航空摄影仪,从空中对地面目标或空中目标进行摄影,获取航摄像片或数字影像。目前无人机摄影测量的应用涉及面非常广,对比来看,国外大部分应用于资源管理与环境监测等,像自然资源管理和监测,包括植被监测、高光谱无人机图像分类和精准农业等;也有环境监测/检查,包括交通监测、道路跟踪、森林火灾监测和河流监测等行业领域。而国内在工程建设和环境监测方面应用都比较多,尤其是基础工程建设、智慧城市建设方面,如在智慧城市中利用无人机摄影测量进行三维建模研究。
对比传统航空摄影测量以及传统数字测图手段,无人机航空摄影测量的优势有:小巧灵活、作业成本低、安全性能高、快速便捷及低空飞行精度高,非常适用于区域面积高分辨率影像的获取,因此国家测绘地理信息局逐步在全国测绘系统配备并推广轻小型无人机[2-3]。无人机摄影测量技术能够快捷地获取到所需的图像,有效地提升生产效率,降低工作人员的劳动强度,凭借其优势,在一些测绘工程中也逐步用无人机摄影测量代替了一些传统的测量手段[4]。如在道路桥梁工程的前期勘测中,原先采用的是传统的全站仪结合RTK技术进行数字测图,由于测量范围广,地形复杂,造成测量进度缓慢,有时候甚至会出现测量人员人身安全问题,现在采用无人机摄影测量大大缩短了时间,节约了人力物力。目前无人机摄影测量可以完成1∶500数字测图,并且也有案例成功将根据摄影测量技术进行的三维建模技术应用到城市测图中,应用到不动产变更测量中[5-7]。
2 房地一体化项目传统测量技术方法
常规的房地一体化项目需要提前制作工作底图,一般选用大比例尺(1∶500~1∶2 000)的地形图、正射影像图或已有地籍图及宗地图作为基础图件,地形测量利用全站仪与RTK以1∶500的比例尺进行全野外解析法测量,利用解析法完成界址测量与房产测量,再利用测量CASS软件进行数据处理,技术路线流程如图1所示。

图1 传统方法技术路线图
3 无人机在房地一体化项目中的应用
利用无人机摄影测量技术进行房地一体化调查,可以省略工作底图的制作,利用航拍影像生成的三维模型进行权属调查,通过模型的线划处理获得宗地面积、界址点坐标以及房产面积等数据。技术路线如图2所示。

图2 无人机方法技术路线图
利用无人机对测区摄影测量,可实现三维模型的建立,结合模型数据来进行权属调查,有利于权属调查的辨别与判断,同时获取的数据可以代替传统测量,用于不动产的量算,从而实现无人机摄影测量在房地产一体化项目中的应用,促进房地一体化项目的开展。
3.1 明确相关技术质量要求
各相关技术精度要求严格按照下发的湘自然资办发〔2020〕75号文件执行,数学基础见表1,界址点和房角点测量精度指标见表2。

表1 数学基础

表2 解析界址点和房角点测量精度指标
3.2 飞行工作
飞行前对测区进行踏勘,飞行摄影前需要做好像控点的布设,像控点的坐标可通过GPS测量获得。选择合适的无人机与摄影仪,选定合适的无人机起降点,提前做好航线规划,提前通过天气预报了解天气情况,确定适合的时间。其中,像控点的布设应选择不被遮挡、对天通视良好且容易明确辨认的地物点和目标点。飞行的各项参数可在试飞阶段实验完成,确定航线规划、拍摄高度和倾斜角度等的最佳参数。飞行时注意做好安全防护措施,无人机摄影要有经验的飞行手进行操作,按照准备工作确定的各项参数输入控制平板,操作无人机起飞执行任务,直至任务完成。任务完成后检查影像质量,如有漏洞及时补测,补测相机参数设置要一致。
3.2.1 无人机的选用
无人机的选用是否合理是无人机摄影测量能否实施的前提。根据精度要求、场地情况和天气情况,续航能力要求等的不同,无人机选用的要求也会不同。本项目由于位于城郊区,房屋周边情况比较复杂,因此需要续航能力比较强、速度快的无人机,此外还要求无人机操作简单且运输携带方便,同时要求采用RTK定位,能自动感知障碍物,定点起降,精准作业,以满足测图要求。
综合考虑,本次项目采用大疆的精灵4 RTK搭载五向镜头,此款无人机将厘米级导航定位系统和高性能成像系统结合在一起,小巧便携,既满足了航测的精度又提高了效率,同时还减少了作业成本。对于建图作业来说,精度与效率至关重要。其携带的RTK功能多频多系统高精度RTK GNSS能达到定位精度:垂直1.5 cm+1 ppm(RMS);水平1 cm+1 ppm(RMS),满足GB/T 7930—2008《1∶500、1∶1 000、1∶2 000地形图航空摄影测量内业规范》的精度要求,可以做到免像控布设进行测量,具体关键指标见表3。

表3 精灵4RTK无人机关键指标
3.2.2 航线规划
航线的规划是无人机摄影测量的关键,合理与否决定了影像的完整度与冗余度是否符合要求。航线间距过大,会造成局部摄影不全,反之航线间距过小,虽保证了影像的完整却造成了时间的浪费以及不必要的工作量增加,因此航空摄影测量规范对影像重叠度有明确要求,为满足航测成图的要求,一般规定见表4,如果地形起伏较大,应当适当提高重叠度值[8]。

表4 重叠度一般要求
然而结合目前无人机倾斜摄影要完成的项目来看,成图比例尺大,精度要求高,因此一般规定的重叠度满足不了项目要求。根据三维倾斜数据的处理经验来看,基于像控点约束,为了满足房屋测量采集项目高精度的要求,倾斜影像应获取地面分辨率优于2 cm的影像数据,同时其航向、旁向重叠度一般建议优于70%,以确保三维模型的效果。而当测区存在高楼时,则应适当加大重叠度,保证高层建筑的模型效果。对于地形起伏较大的区域,则应根据地形变高飞行,保证测区内大部分地物的分辨率都优于2 cm,以此来保证三维模型的效果及精度。
结合本次项目测区踏勘的情况分析,设计地面分辨率为1.7 cm,航高为100 m,航向重叠度为85%,旁向重叠度为70%,每个架次预计飞行时间约为30 min。将测区范围线导入无人机管家软件内,软件自动生成满足测区地形情况和精度要求的最佳航线。
3.3 无人机摄影测量数据处理
无人机摄影测量数据处理包括倾斜三维建模及数据处理分析。具体为:将摄影质量合格的影像导入专门的软件中,通过导入像控点坐标、匹配坐标系、空中三角测量和空三解算等操作进行三维建模。根据建立的模型进行数据线划处理,线划提取过程中做到不变性、不移位、无错漏。最后根据线划的数据利用软件计算分析获得对应的界址点坐标、房产面积等不动产数据。
三维建模:采用合适的无人机摄影测量建模软件是房地一体化调查的重要步骤。利用软件功能生成实景模型,为调查对应的场景以及相应的数据的调查人员可以快速判断并完成对应的房地调查。本项目采用Smart3D软件进行倾斜摄影、空中三角测量计算与三维建模。具体空三建模流程如图3所示。

图3 空三建模流程
由于测区大,重叠度高,数据多、任务量较大,因此将测区分割成多块进行内业建模以加快处理数据的速度。建模分块的大小以及重叠度要结合测区范围大小与软件性能来确定,最后根据测区大小确定生成三维成果的范围,并使用kml格式的范围线数据对建模区域进行约束,模型成果输出为OSGB格式。部分范围模型效果如图4所示。

图4 测区三维模型效果
特征点提取:本项目利用map3D软件进行线化提取,生成dwg地形图,在画图过程中遇到分辨不出的地物要做好标识,需要开展外业测绘补充完善,线化提取部分成果如图5所示,线化提取后还需利用CASS软件对图形进行修整。
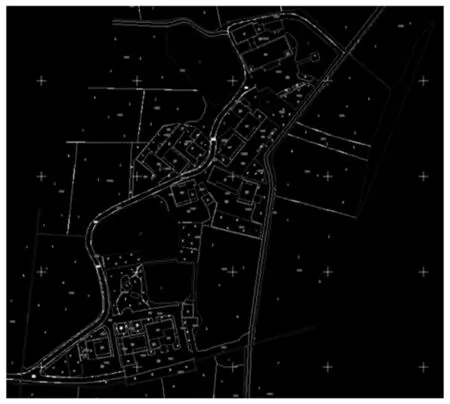
图5 线化提取成果
3.4 精度检验
从测区按比例抽取地物进行野外测绘其房屋界址点坐标、房屋边线长度以及面积,经检查符合规范精度要求。
4 结束语
无人机摄影测量技术的不断发展加深了在相关行业领域的应用拓展,其高效率的工作方式比传统测量方式节约了大量的人力物力,大大缩短了工期。但是由于其精度以及成本问题,在选用测量技术方法时,还要结合项目具体的特点以及综合成本来考虑。此外在选用无人机摄影测量方法时要选择合适的无人机以及三维建模软件,采用合适的方法得到满足技术要求的数据成果。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14 03:10:40
河北地质(2021年4期)2021-03-08 01:59:14
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:02
中国铁道科学(2019年5期)2019-10-19 07:55:14
测绘通报(2018年10期)2018-11-02 10:07:28
电子制作(2018年17期)2018-09-28 01:56:44
通信电源技术(2018年5期)2018-08-23 01:15:36
电子制作(2018年11期)2018-08-04 03:25:38
测绘科学与工程(2016年5期)2016-04-17 06:51:15
电子设计工程(2015年3期)2015-02-27 12:03:45