低压配电网拓扑异动自适应识别与校验
2022-08-30 03:59张秋瑞何柏娜王银忠孙永健戴雪婷
山东电力技术 2022年8期
张秋瑞,何柏娜,王银忠,孙永健,戴雪婷
(1.国网山东省电力公司东营供电公司,山东 东营 257300;2.山东理工大学电气与电子工程学院,山东 淄博 255000)
0 引言
低压配电网位于配电系统末端,直接向用户提供服务,其运行可靠性直接影响用户供电质量。
低压配电网结构因容量增加、技术改造、城市建设等发生变化,异动率高,需要及时更新系统网络拓扑、参数配置,人工维护工作量大。由于低压配电网缺少信息化、自动化手段,导致低压配电网拓扑结构识别不正确,运行维护人员无法准确掌握当前配电网运行情况,不能准确定位故障点并及时修复,严重影响用户用电体验[1-2]。随着风能、光伏等间歇性分布式电源以及电动汽车、储能等装置的出现,低压配电网节点数日益增多、结构也愈发复杂。
配电网拓扑辨识是配电网管理系统高级应用软件的重要组成部分,是配电自动系统中各种高级辅助软件功能实现的基础,因此,研究配电网拓扑自适应识别对电网安全运行具有重要意义。
目前,识别低压配电网拓扑结构方法主要分成两类。第1 类是以系统状态估计和潮流分析为基础。文献[3-4]利用测量的时序数据或伪测量,通过计算潮流分析,确定误差最小的拓扑作为当前网络实际运行拓扑。文献[5]通过分析电压协方差矩阵将配电网拓扑结构识别问题转化为求解最大似然估计问题。上述几种方法都需要准备大量测量数据,但在配电系统当中很难实现这种要求。第2 类拓扑识别方案通过数据驱动实现,不依赖对系统拓扑结构的先验知识。文献[6]利用智能电表的电压测量时序曲线对其进行相关性分析以确定节点间相位关系,以此校正地理信息系统中拓扑信息存在的错误。文献[7]利用信息论中互信息判断节点间相位关系,借助概率图模型分析配电网拓扑结构。文献[8]将拓扑识别问题转换为线性回归问题,将确定某个节点邻域问题转换为确定各节点电压时序数据的关联系数问题。但是,第2 类方法要求所有节点都安装测量设备。文献[9]考虑了配电网数据测量中数据丢失问题,仅利用一部分节点测量数据进行配电网拓扑识别。文献[6,9]中提出的方法都只适用于辐射型配电网。文献[10]利用Tanimoto 相似度系数计算各组电压序列数据之间相关性和非相关性,从而实现低压配电网拓扑识别。文献[11]提出采用加权最小二乘的低压配电台区拓扑识别方法,达到识别拓扑改变的目的。
综上所述,目前国内外针对低压配电网拓扑结构识别的研究多采用基于电压测量时序数据相关性拓扑识别或基于线性回归拓扑识别方法。本文以配电网拓扑识别和图论理论相结合,基于智能电表获取各节点电气量数据,深度挖掘节点数据与配电网拓扑之间关系,通过分析智能电表数据,实现对配电网拓扑及用户节点相别识别,利用主成分分析与凸优化结合算法对拓扑进行识别,搭建模型验证算法可行性。
1 拓扑识别模型搭建
1.1 系统参数测量
实际配电网接线方式利用图论知识转换为有向图形式,便于识别拓扑。低压配电网拓扑一般分为四级,始于配电变压器(以下简称配变)低压侧出线端,将配变、分支箱、表箱、用户负荷抽象成图论中的节点,配变到用户间的配电线路转换成节点之间的边,网络树状图如图1所示。
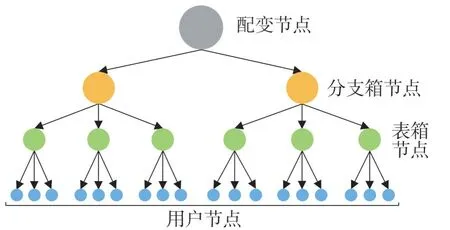
图1 网络拓扑的树表示
假设所有节点均安装智能电表,以固定时间间隔收集电能数据(单位为Wh),设有a个终端用户、b个配电变压器,形成电能数据Z为

1.2 能量守恒
如图2 所示,8 个电能表构成节点,由7 条线路连接。
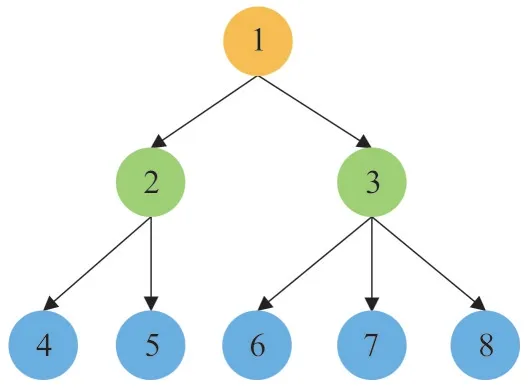
图2 配电网拓扑结构
能量守恒表示任何节点上进线能量之和等于出线能量之和。假设读数不受误差影响,应用能量守恒定律,对所有采样时间节点进行编号j=1,…,N,图2中节点1,2,…,8处的仪表读数符合式(2)。
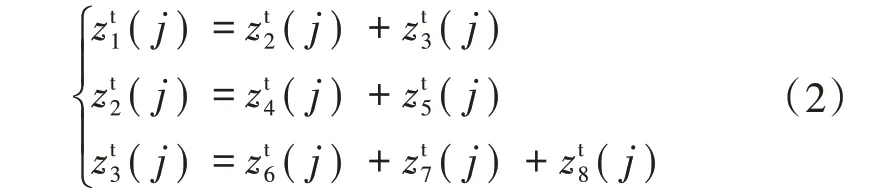
在分布式网络中,由能量守恒定律可知父节点电表读数等于其子节点电表读数之和。该原理用线性方程表示为

式中:K为图2 中所有父节点的集合为第k个父节点第j次测量值;Hk为父节点k所对应的子节点的集合。
1.3 分布式能源网络
分布式电源(Distributed Energy Resource,DER)在配电网中普及率逐渐提高,分析配电网拓扑需考虑分布式电源影响。电能表一般装在用户电表后端,当本地电能供大于求时,分布式电源向用户供电或向电网供电[12]。
考虑变压器相位,当P相供给3 个用户供电,如图3 所示,每个用户都连接一个DER,此时每个用户的电能表测量的是净能耗。假设在第j个时间间隔内,用户1 的净消费为负,如(j)=-20 Wh,而用户2和3 的净消费为正(j)=50 Wh,(j)=100 Wh。通过电能表1 输入的电能由用电设备2 和3 消耗,而剩余的电能由相位P满足。因此,在理想情况下,=130 Wh。在这种情况下,能量守恒仍然成立,即
1.4 参数损失与误差
由于智能电表读数存在随机误差和时钟同步误差[13-14],因此须考虑测量技术损失和噪声源,数据主要损耗和误差产生的原因概括为以下3种。
技术损耗。技术损耗包括铁耗、介电损耗等不变损耗和铜耗等可变损耗,可变损耗随着网络中负荷的变化而变化,与线路长度有关。
电表读数随机误差。最新ANSI 电表标准规定电表精度等级必须为0.2 或0.5[15]。这表明,对于0.2 和0.5精度等级的仪表,仪表读数可分别在真值的±0.2%和±0.5%范围内。
时钟同步误差(Clock Synchronization Errors,CSE)。假设所有电表时钟都同步,但同步性存在误差,导致电能测量的时间间隔发生变化,变化通常在几秒到十几秒之间。
第j个时间间隔量测设备采集的n个变量样本数据zm(j)为

由于测量值因随机噪声产生干扰使样本存在误差。因此,测量变量的向量表示为

式中:zt(j)为第j次测量样本实际值的向量;e(j)为噪声引起的误差向量。
2 配电网拓扑识别机理
2.1 主成分分析
主成分分析(Principal Component Analysis,PCA)是一种应用广泛的多元数据分析工具,其原理是通过对原有变量的重新组合产生相互无关的综合变量。利用分解原有数据得到主成分代替原有成分,以此达到对数据降维的目的。PCA 还能确定变量间的线性关系,在识别存在噪声的模型中也有所应用[16-17]。
根据能量守恒原理,终端用户测量值与上层配电变压器测量值的线性关系为

式中:C为(b×(a+b))维约束矩阵。
电能测量向量zm(j),j=1,2,…,N通过叠加构造(n×N)维矩阵Z,即式(1)所示的电能数据。由式(6)可知,无噪声数据位于a维子空间中,该子空间与C的行所跨越的b维子空间正交。使用PCA进行模型识别,在给定数据矩阵Z时估计a维真实数据子空间和b维约束子空间。
主成分分析法中,子空间由协方差矩阵SZ=ZZT特征向量中获得[18]。识别这些子空间可使测量值和变量值的去噪估计值之间平方差之和最小。对Z奇异值分解(Singular Value Decomposition,SVD)确定协方差矩阵特征向量,如式(7)所示。

式中:U1为对应SZ的a个最大特征值的正交特征向量组成的矩阵;U2为对应于SZ的b个最小特征值的正交特征向量组成的矩阵;S1和S2为奇异值为Z 的对角矩阵。为C延展出的子空间矩阵,满足关系如式(8)所示。

式中:z为电能测量样本向量。
将变量划分为nd=b维因变量zd和ni=a维自变量zi,a为假设的用户个数,b为配变,得到回归模型。
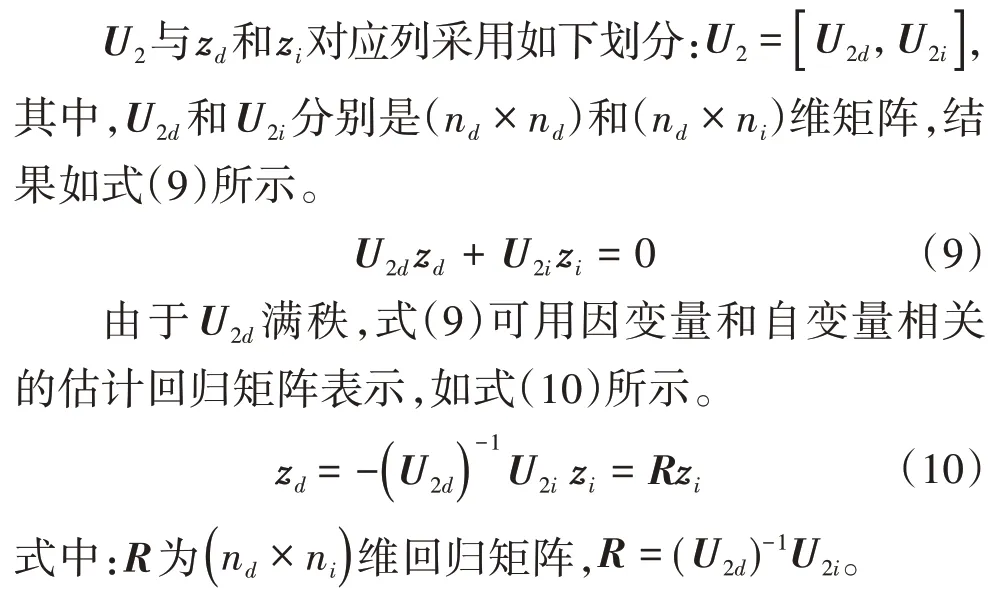
2.2 凸优化相位识别
凸优化求解问题是约束条件为一组等式或不等式时,求解目标函数的最大值或最小值问题,其表达形式为:
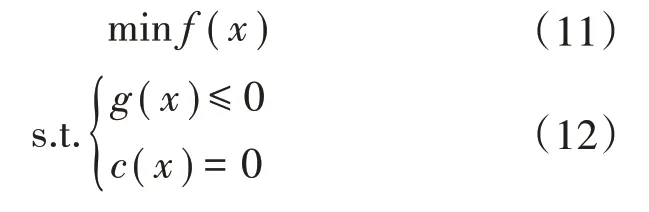
式中:g(x)为不等式约束条件;c(x)为等式约束条件;f(x)、g(x)和c(x)均为凸函数,凸函数的可行域为凸集,其局部最优解也为全局最优解。
每个用户只与某变压器一相连接,用户相位连接关系具有唯一性,拓扑矩阵R的每一列中只有一个元素为1,其余元素均为0。该约束关系为

式中:A为元素全为1、长度为a的行向量。
设U={1,2,…,a}为用户节点集合,T={1,2,…,b} 为相位节点集合。Rxy为用户节点x与相位节点y之间的连接关系,定义如式(14)所示。

式中:x∈U;y∈T。
配电网拓扑识别问题可表示为半正定约束优化问题[19]。
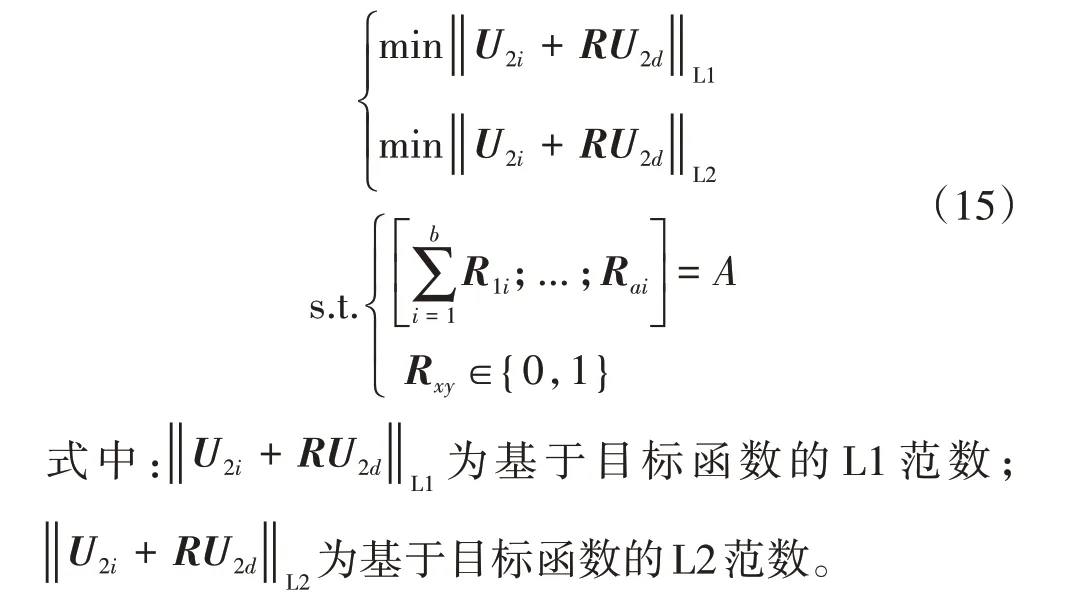
由于0-1 规划问题的可行域不连续,不满足凸优化要求,需加入松弛变量将其转变为不等式约束,将式(15)中模型转变为凸优化模型,如式(16)所示。
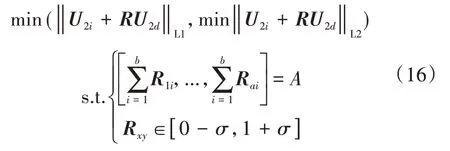
式中:σ为松弛变量。
L1 范数与L2 范数都是凸函数,凸松弛之后模型仍为凸函数,由于目标函数易于求偏导,因此采用内点法可迅速求得最优解。
2.3 拓扑辨识算法步骤
相位识别中将节点分为两部分,分别为变压器相位节点及终端用户节点,相位识别确定这两类节点间的连通性关系。将变压器相位节点数据变量作为因变量,终端用户节点数据变量作为自变量,根据能量守恒定律以及主成分分析等获得相位节点与用户节点间的连通性关系。
PCA结合凸优化相位识别步骤:
1)进行矩阵Z奇异值分解,获得U2;
2)将U2矩阵转置分解为U2d和U2i;
3)设置待求矩阵变量R;
4)设定如式(18)所示目标函数;
5)设定如式(19)所示的约束条件;
6)凸优化问题包括a×b个待优化变量、a个等式约束条件、a×b个不等式约束条件,在MATLAB中运行yalmip优化工具求解得到回归矩阵R;
7)回归矩阵R每列元素四舍五入为1 或0,以此判断相位连通性。
主成分分析与凸优化结合算法,其拓扑识别流程如图4所示。
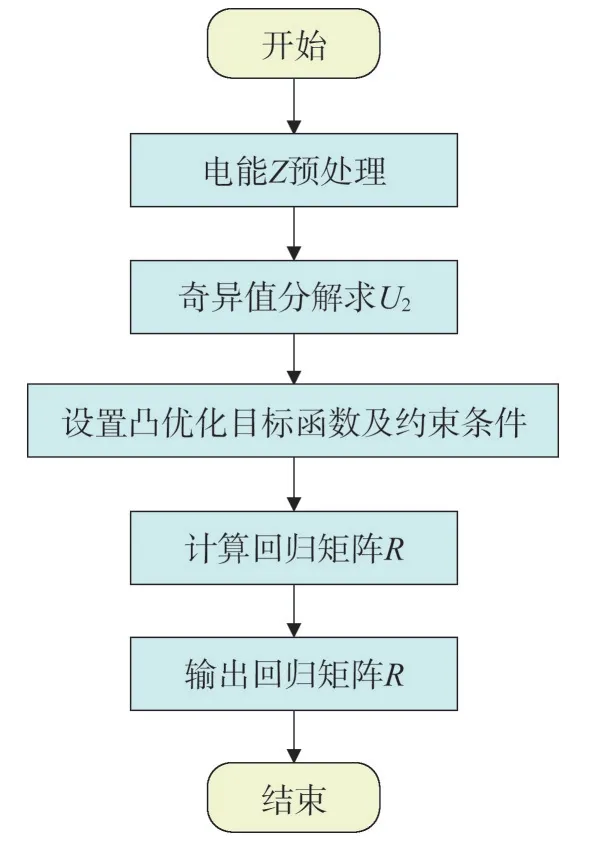
图4 主成分分析结合凸优化算法流程
3 算例分析
3.1 相位辨识
首先通过某低压配电台区2 层的实际拓扑结构验证文中所提相位识别算法的可行性,该12 节点模型分为上下两层网络,上层为相位节点,即3 个父节点A、B、C,下层9 个用户节点与之相连。设定松弛变量σ=0.1。12节点网络采集数据如表1所示,计算回归矩阵R如表2所示。
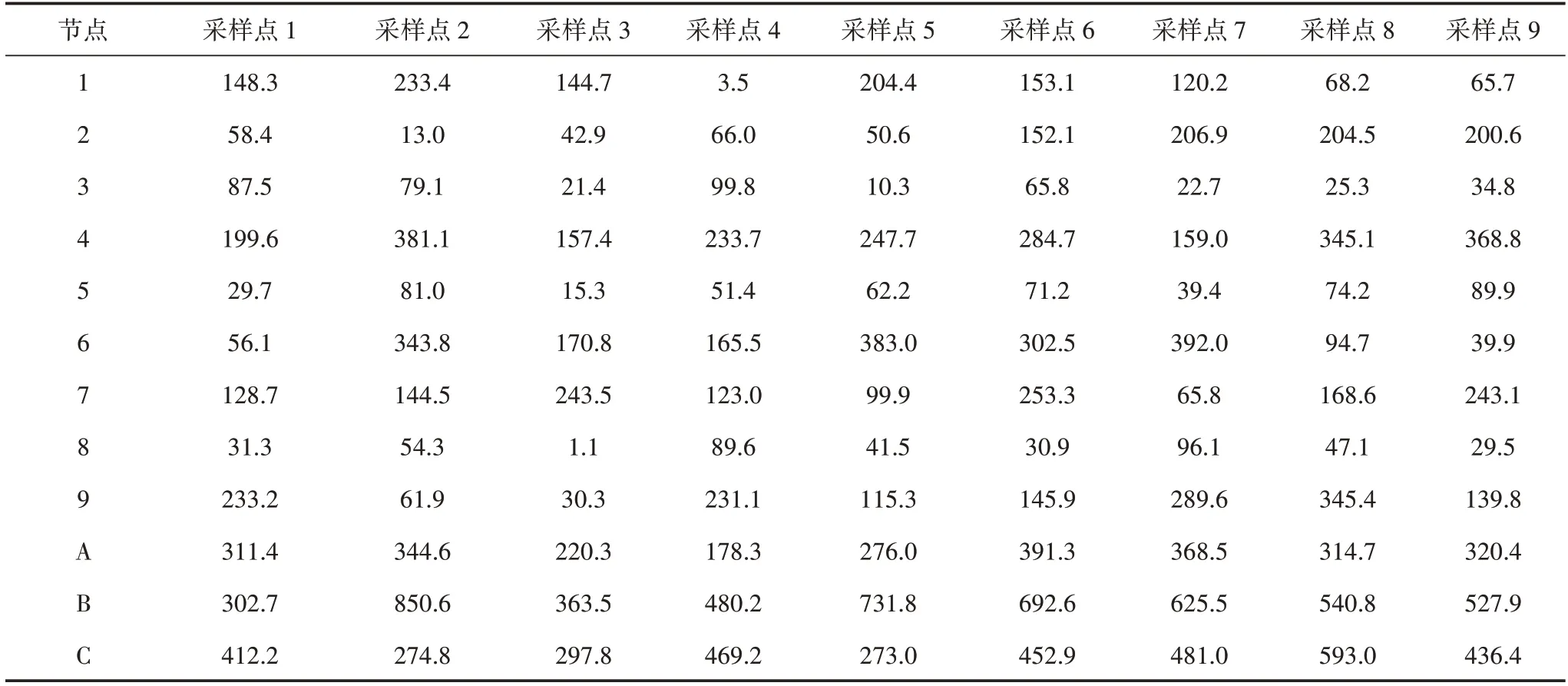
表1 12节点网络电能测量数据
表2 中数据四舍五入得到最终拓扑识别结果。结合回归矩阵与有向图之间的关系,可得出2 层12节点配电网拓扑结构,其中用户节点1、2、3 与相位节点A 相连,用户节点4、5、6 与相位节点B 相连,用户节点7、8、9与相位节点C相连,拓扑结构可视化关系如图5所示。

表2 回归得到的拓扑矩阵
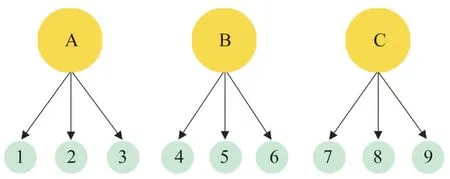
图5 12节点拓扑关系
3.2 多节点配电网仿真分析
上文已通过实际采集的测量数据验证了12 节点两层拓扑结构识别算法的准确性,通过多层网络进一步验证算法的适用性。该算法可以适应电能数据的变化而自动调整识别结果,即在电能数据更新时刻进行拓扑关系的实时更新,采用5 层31 节点网络拓扑验证算法的可行性,5层拓扑如图6所示。
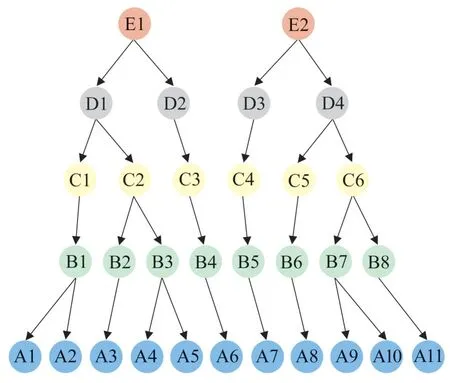
图6 5层31节点模型
采用主成分分析与凸优化结合的算法得到识别结果,将识别结果可视化,如图7所示。
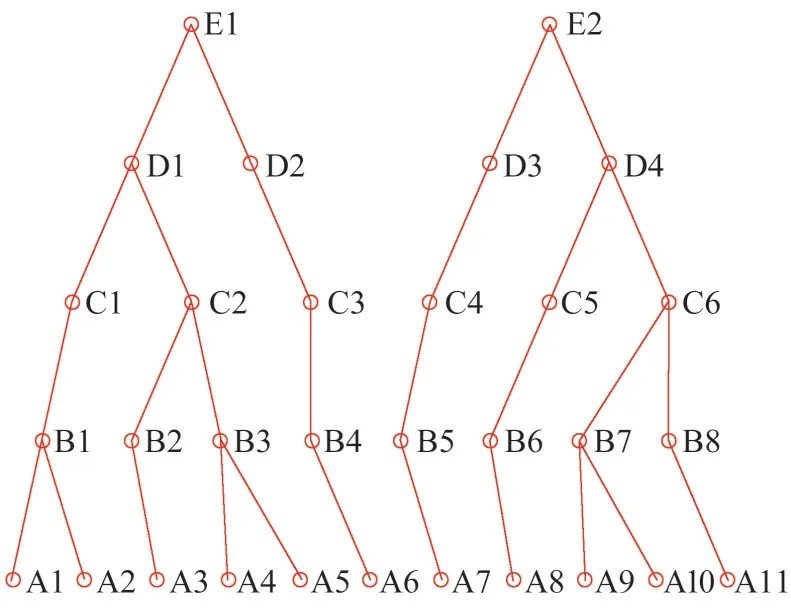
图7 5层31节点识别结果
将网络拓扑数据转化为图7 所示折线图,更直观表达算法识别准确度。通过对比图6 仿真结果与图7网络拓扑图可知,算法在辨识5层网络拓扑时仍具可行性。
选用104 节点拓扑网络,其中包含100 个用户节点和4 个相位节点。仿真时数据矩阵中加入信噪比为13 dB的白噪声,使其更接近实际运行中所采集数据。采用不同算法对网络进行识别,识别结果如图8所示,图中,纵坐标cor为算法准确度。
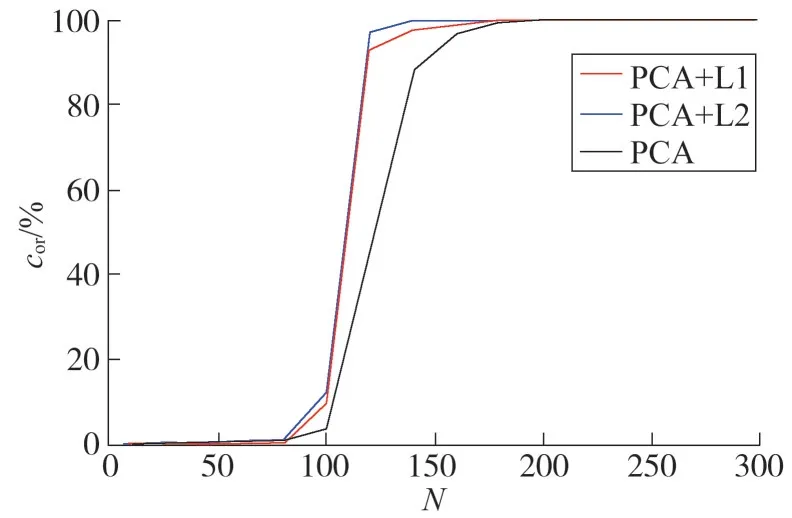
图8 拓扑识别准确度对比
由图8 可知,主成分分析与凸优化结合算法的准确度,比单独主成分分析的准确度得到提升。PCA+L2 算法相较于单独主成分分析其准确度为100%时所需要的采样数从200 降低到160,在实际运行中由于采样数需求降低可节省采样时间。当采样数据充足时,采用算法时间复杂度更好的算法以节约拓扑识别时间。
3.3 算法时间分析
智能电网及云计算的飞速发展对算法运行速度提出了更高要求,算法运行时间复杂度也是决定一个算法是否可行的重要指标。算法运行时间复杂度是由算法运行所需时间决定。在所提算法中,主要由总节点数n和采样数N两个参数影响算法的运行速度,因此首先保持总节点数n不变,得到算法在不同采样点数下的仿真时间,如图9所示。
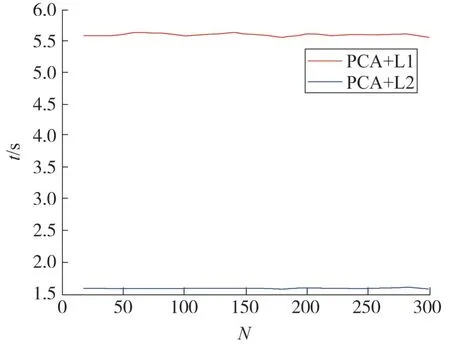
图9 固定总节点数n的时间对比
从图9中可知,主成分分析与凸优化算法的运行时间与采样点数N的大小无直接关系,当N改变算法时间无明显波动。曲线波动是由于采样点数N的改变导致奇异值分解过程计算时间变化所引起的,但是凸优化算法的总体时间仍稳定在固定区间内。
其次固定子节点与父节点之比,调整总节点数n进行仿真,得到算法时间与总节点数之间的关系,如图10所示。
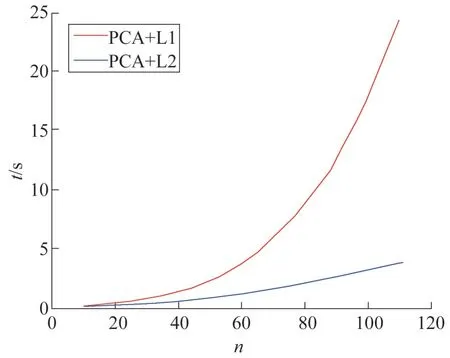
图10 固定N的仿真时间对比
分析图10可知,采样点数N固定时,主成分分析结合凸优化算法运行时间随总节点数增加而增加,目标函数的L2 范数准确度和仿真时间相比目标函数的L1范数运算结果更优。
4 结语
针对低压配电网拓扑异动自适应识别问题展开研究。首先使用PCA对电能表采集的电能数据进行降维分析,其次采用PCA与凸优化理论相结合的方法,依据范数逼近和凸松弛原理,将网络拓扑识别问题转换为凸优化问题,提高算法速度。使用MATLAB 随机生成多节点网络模型验证PCA 与凸优化结合算法可行性,通过仿真比较两种算法准确度及识别速度。
通过大量实验结果验证PCA 与凸优化结合算法仿真时间与采样数的相关性很小,仅与总节点数有关,该算法在大规模数据下保持较高识别速度,识别准确度高于PCA 算法。该方法具有实际意义,不仅可以检测拓扑结构变化,还可以检测损耗估计和非技术性损耗等问题。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年9期)2021-07-16
建材发展导向(2021年7期)2021-07-16
电子制作(2019年22期)2020-01-14
电子制作(2019年16期)2019-09-27
活力(2019年22期)2019-03-16
数学大王·低年级(2018年5期)2018-11-01
电子制作(2018年8期)2018-06-26
新作文·小学低年级版(2016年12期)2016-09-10